Einführung in die Numerik
Olaf Ippish
Universität Heidelberg
Interdisziplinäres Zentrum für Wissenshaftlihes Rehnen
Im Neuenheimer Feld 368, D-69120 Heidelberg
email: olaf.ippishiwr.uni-heidelberg.de
12. Juli 2011
Dieses Dokument enthält Zusatzmaterial inder Form von Beispielen und
AlgorithmensowiederenpraktisherImplementierunginC++zurVorlesung
EinführungindieNumerik gehaltenimSommersemester2011.Esbasiertim
wesentlihen aufArbeitenvonPeter Bastian(IWR,UniversitätHeidelberg).
Inhaltsverzeihnis
1 Motivation 2
1.1 Modellbildungund Simulation . . . 2
1.2 Ein einfahes Beispiel: Das Fadenpendel . . . 4
1.3 Inhaltsübersiht der Vorlesung . . . 12
2 Gleitpunktzahlen 13
2.1 Beispiel zur Fehlerakkumulation . . . 14
3 Gauÿelimination 16
4 Interpolation und Approximation 21
4.1 Motivation . . . 21
4.2 Polynominterpolation . . . 21
4.3 Spline Interpolation . . . 26
4.4 Praktishes zur Diskreten Fourier Analyse . . . 31
4.5 Gauÿ-Approximation . . . 31
5 Quadratur 32 5.1 Newton-Cotes Formeln . . . 32
5.2 Fehlerkontrolle . . . 35
5.3 Gauÿ- und adaptiveQuadratur . . . 36
5.4 Mehrdimensionale Quadratur . . . 39
6 Ein kleiner Programmierkurs 42 6.1 Hallo Welt . . . 42
6.2 Variablenund Typen . . . 44
6.3 Entsheidung . . . 46
6.4 Wiederholung . . . 47
6.5 Funktionen . . . 52
6.6 Funktionsshablonen . . . 54
6.7 HDNUM . . . 56
Lehrbüher Numerik 63
Lehrbüher C++ 63
Weiterführende Literatur 63
1 Motivation
1.1 Modellbildung und Simulation
Die Wissenshaftlihe Methode
•
Experiment: Beobahtewas passiert.•
Theorie: Versuhe die Beobahtung mitHilfe vonModellen zu erklären.•
Theorieund Experimentwerden sukzessive verfeinert und verglihen, biseine ak-zeptable Übereinstimmung vorliegt.
•
InNaturwissenshaftundTehnikliegenModelleoftinFormmathematisherGlei- hungen vor.•
OftkönnendieModellgleihungennihtgeshlossen(mit Papierund Bleistiftoder Mathematia...) gelöst werden.Simulation
•
Simulation: Gleihungennumerishlösen.UndurhführbareExperimentewerden möglih(z. B. Galaxienkollisionen).
Teuere Experimentewerden eingespart (z. B. Modelle imWindkanal).
Parameterstudienshneller durhführbar.
(Automatishe) Optimierungvon Prozessen.
•
Vielfältiger Einsatz in Naturwissenshaft, Tehnik und Industrie: Strömungsbe- rehnung (Klimasimulation),Festigkeit von Bauwerken ...•
Grundlagefür allediese Anwendungen sind numerishe Algorithmen!mathematisches Modell konzeptionelles Modell
numerisches Modell Computerprogramm
Realität
wesentliche Prozesse
Wellenausbreitung Transport von Materie Reaktion
Phasenübergänge ...
algebraische Gleichungen Differentialgleichungen Wahrscheinlichkeiten
Funktionen, ...
Objekte: reelle Zahlen,
Näherungsverfahren zur Lösung oben genannter Gleichungen Komplexe SW
SW−Engineering, Qualität High Performance Comp.
Visualisierung
?
Simulation
Effizienz ("Teraflop")
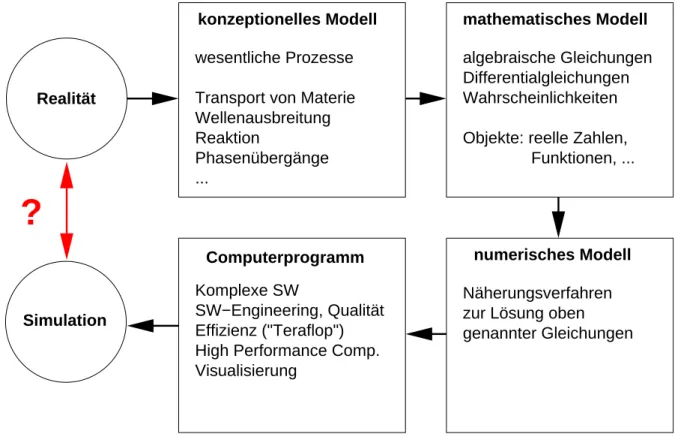
Abbildung1: Prinzipielles Vorgehen imWissenshaftlihen Rehnen.
Die prinzipielle Herangehensweise im Wissenshaftlihen Rehnen zeigt Abbildung 1.
Die erfolgreihe Durhführung einer Simulation erfordert die interdisziplinäre Zusam-
menarbeitvonPhysikern oder Ingenieuren mitMathematikern und Informatikern.
Fehlerquellen
Untershiede zwishen Experiment und Simulation haben vershiedene Gründe:
•
Modellfehler:Einrelevanter Prozess wurdeniht oder ungenau modelliert(Temp.konstant, Luftwiderstandvernahlässigt, ...)
•
Datenfehler:Messungen von Anfangsbedingungen,Randbedingungen,Wertenfür Parameter sind fehlerbehaftet.•
Abshneidefehler: Abbruh von Reihen oder Iterationsverfahren, Approximation von Funktionen•
Rundungsfehler: Reelle Zahlen werden imRehner genähert dargestellt.Untersuhung vonRundungsfehlernund AbshneidefehleristeinzentralerAspektder
Vorlesung!
1.2 Ein einfahes Beispiel: Das Fadenpendel
Pisa, 1582
Der Student Galileo Galileisitzt in der Kirhe und ihmist langweilig.Er beobahtet
den langsam über ihm pendelnden Kerzenleuhter und denkt: Wie kann ih nur die
Bewegung dieses Leuhters beshreiben?.
Konzeptionelles Modell
Welhe Eigenshaften (physikalishen Prozesse) sind für die gestellteFrage relevant?
•
Leuhter istein Massenpunkt mitder Massem
.•
DerFaden der Längeℓ
wird alsrigide und masselos angenommen.•
DerLuftwiderstand wird vernahlässigt.Nunentwikle mathematishes Modell.
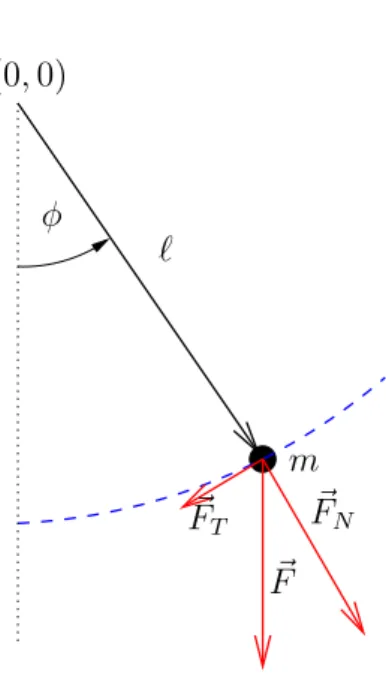
Abbildung 2 zeigt das Fadenpendel, welhes aus dem sogenannten konzeptionellen
Modellresultiert.
Kräfte
•
Pendel läuftauf Kreisbahn: NurTangentialkraft istrelevant.•
TangentialkraftbeiAuslenkungφ
:F ~ T (φ) = − m g sin(φ)
cos(φ) sin(φ)
.
PSfrag replaements
(0, 0)
ℓ φ
F ~ F ~ N
F ~ T
m
Abbildung 2:Das Fadenpendel.
•
Alsoetwa:F ~ T (0) = − mg 0
0
, F ~ T (π/2) = − mg
0 1
.
•
Vorzeihen kodiert Rihtung.Dies überlegt man sihso. Die Gewihtskraft zeigt immer nahunten, also
F ~ (φ) = mg 0
− 1
.
DieNormalkomponentezeigtimmer inRihtung
~n(φ) = (sin φ , − cos φ) T
und damit istdieKraftin Normalenrihtung
F ~ N (φ) = ( F ~ (φ) · ~n(φ))~n =
mg 0
− 1
·
sin φ
− cos φ
sin φ
− cos φ
= mg cos φ
sin φ
− cos φ
.
Damitrehnet man dieTangentialkraftaus
F ~ T (φ) + F ~ N (φ) = F ~ (φ)
aus:F ~ T (φ) = F ~ (φ) − F ~ N (φ) = mg 0
− 1
− mg cos φ
sin φ
− cos φ
= − mg
cos φ sin φ 1 − cos 2 φ
= − mg sin φ
cos φ sin φ
.
Weg, Geshwindigkeit, Beshleunigung
•
Wegs(t)
,Geshwindigkeitv (t)
,Beshleunigunga(t)
erfüllen:v(t) = ds(t)
dt , a(t) = dv(t) dt .
•
Fürden zurükgelegtenWeg (mit Vorzeihen!)gilts(t) = ℓφ(t)
.•
Alsofür dieGeshwindigkeitv (t) = d s(φ(t))
dt = d ℓφ(t)
dt = ℓ dφ(t) dt
•
und dieBeshleunigunga(t) = d v(φ(t))
dt = ℓ d 2 φ(t) dt 2 .
Bewegungsgleihung
•
Einsetzen indas 2.Newton'she Gesetzm a(t) = F (t)
liefert nun:mℓ d 2 φ(t)
dt 2 = − mg sin(φ(t)) ∀ t > t 0 .
•
DieKraftisthierskalar(vorzeihenbehafteterBetrag der Tangentialkraft),dawir nurden zurükgelegtenWegbetrahten.•
Ergibtgewöhnlihe Dierentialgleihung 2.Ordnung für dieAuslenkungφ(t)
:d 2 φ(t)
dt 2 = − g
ℓ sin(φ(t)) ∀ t > t 0 .
(1)•
Eindeutige Lösungerfordert zwei Anfangsbedingungen (t 0 = 0
):φ(0) = φ 0 , dφ
(0) = u 0 .
Lösung bei kleiner Auslenkung
•
AllgemeineGleihung fürdas Pendel ist shwer analytish zu lösen.•
Fürkleine Winkelφ
giltsin(φ) ≈ φ,
z.B.
sin(0, 1) = 0, 099833417
.•
DieseNäherung reduziert die Gleihung aufd 2 φ(t)
dt 2 = − g ℓ φ(t).
•
Ansatzφ(t) = A cos(ωt)
liefertmitφ(0) = φ 0
,dφ
dt (0) = 0
dann dieaus der ShulebekannteFormel
φ(t) = φ 0 cos r g
ℓ t
(3)
Volles Modell; Verfahren 1
•
Löse das volleModell mitzweinumerishen Verfahren.•
ErsetzeGleihung zweiter Ordnung durh zwei Gleihungenerster Ordnung:dφ(t)
dt = u(t), d 2 φ(t)
dt 2 = du(t) dt = − g
ℓ sin(φ(t)).
•
ErsetzeAbleitungen durh Dierenzenquotienten:φ(t + ∆t) − φ(t)
∆t ≈ dφ(t)
dt = u(t), u(t + ∆t) − u(t)
∆t ≈ du(t)
dt = − g
ℓ sin(φ(t)).
•
Mitφ n = φ(n∆t)
,u n = u(n∆t)
erhält man Rekursion(Euler):φ n+1 = φ n + ∆t u n φ 0 = φ 0
(4)u n+1 = u n − ∆t (g/ℓ) sin(φ n ) u 0 = u 0
(5)-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2
0 0.5 1 1.5 2 2.5 3 3.5 4
Auslenkung
Zeit
Konvergenz Differenzenquotient (Euler), phi=0.1 vereinfachtes Modell
dt=0.2 dt=0.1 dt=0.01 dt=0.001
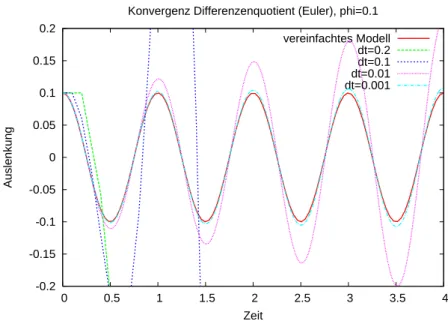
Abbildung3:Simulation des Fadenpendels (volles Modell) bei
φ 0 = 0.1 ≈ 5.7 ◦
mitdemEulerverfahren.
Volles Modell; Verfahren 2
•
Nutze Näherungsformel für diezweite Ableitung, sog. Zentraler Dierenzenquoti- ent:φ(t + ∆t) − 2φ(t) + φ(t − ∆t)
∆t 2 ≈ d 2 φ(t) dt 2 = − g
ℓ sin(φ(t)).
•
Auösennahφ(t + ∆t)
ergibtRekursionsformel (n ≥ 2
):φ n+1 = 2φ n − φ n − 1 − ∆t 2 (g/ℓ) sin(φ n )
(6)mitder Anfangsbedingung
φ 0 = φ 0 , φ 1 = φ 0 + ∆t u 0 .
(7)(Diezweite Bedingung kommt aus dem Eulerverfahren oben).
Abbildung 3 zeigt das Eulerverfahren inAktion. Für festen Zeitpunkt
t
und∆t → 0
konvergiert dasVerfahren.Fürfestes
∆t
undt → ∞
nimmtdasVerfahrenimmergröÿereWerte an.
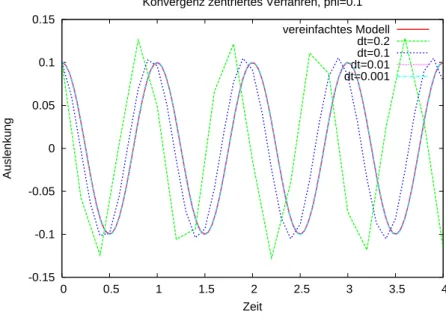
Abbildung4zeigtzum Vergleihdas zentrale Verfahrenfürdiegleihe Anfangsbedin-
gung.ImUntershied zum explizitenEulersheint derFehlerbeifestem
∆t
undt → ∞
-0.15 -0.1 -0.05 0 0.05 0.1 0.15
0 0.5 1 1.5 2 2.5 3 3.5 4
Auslenkung
Zeit
Konvergenz zentriertes Verfahren, phi=0.1 vereinfachtes Modell
dt=0.2 dt=0.1 dt=0.01 dt=0.001
Abbildung4:Simulation des Fadenpendels (volles Modell) bei
φ 0 = 0.1 ≈ 5.7 ◦
mitdemzentralen Verfahren.
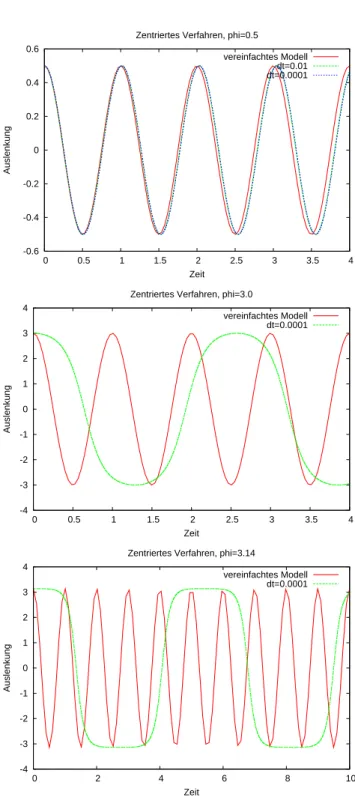
Nunkönnenwir dasvolleModellmitdemvereinfahten Modellvergleihenundsehen
welhe Auswirkungen die Annahme
sin φ ≈ φ
auf das Ergebnis hat. Abbildung 5 zeigtdienumerishe Simulation.Selbstbei
28.6 ◦
istdieÜbereinstimmungnoheinigermaÿen passabel.Für gröÿere Auslenkungen istdas vereinfahteModell völligunbrauhbar, dieForm der Shwingung ist keinKosinusmehr.
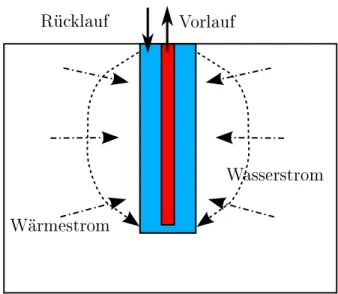
Eine Geothermieanlage
Wir betrahten die Modellierung und Simulation einer Geothermieanlage. Den she-
matishen Aufbau zeigt die Abbildung 6. Kaltes Wasser ieÿt in einer Bohrung nah
unten, wird erwärmt und ineinem isoliertenInnenrohr wiedernah oben geführt.
•
Grundwasserströmung gekoppelt mitWärmetransport.•
Welhe Leistung erzielt soeine Anlage?Modell für eine Geothermieanlage
•
Strömung des Wassers inund um das Bohrloh∇ · u = f, u = − K
µ ( ∇ p − ̺ w G)
-0.6 -0.4 -0.2 0 0.2 0.4 0.6
0 0.5 1 1.5 2 2.5 3 3.5 4
Auslenkung
Zeit
Zentriertes Verfahren, phi=0.5 vereinfachtes Modell
dt=0.01 dt=0.0001
-4 -3 -2 -1 0 1 2 3 4
0 0.5 1 1.5 2 2.5 3 3.5 4
Auslenkung
Zeit
Zentriertes Verfahren, phi=3.0
vereinfachtes Modell dt=0.0001
-4 -3 -2 -1 0 1 2 3 4
0 2 4 6 8 10
Auslenkung
Zeit
Zentriertes Verfahren, phi=3.14
vereinfachtes Modell dt=0.0001
Abbildung5:Vergleih von vollem und vereinfahtem Modell (jeweils in rot) bei den
Winkeln
φ = 0.5, 3.0, 3.14
gerehnet mit dem zentralen Verfahren.PSfrag replaements
Vorlauf Rüklauf
Wasserstrom
Wärmestrom
Abbildung6:Shematisher Aufbaueiner Geothermieanlage.
•
Transport der Wärme durh Konvektion und Wärmeleitung∂(c e ̺ e T )
∂t + ∇ · q + c w ̺ w f T = g,
q = c w ̺ w uT − λ ∇ T
inAbhängigkeitdiverserParameter:Bodendurhlässigkeit,Wärmekapazität,Dih-
te, Wärmeleitfähigkeit, Pumprate sowie Rand- und Anfangsbedingungen.
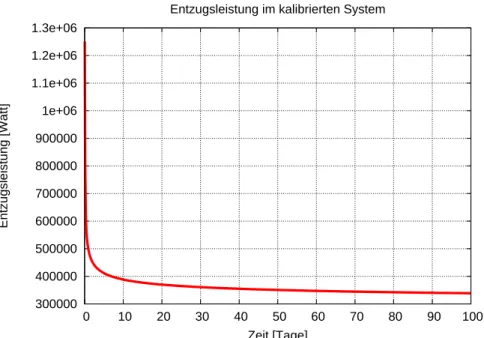
Abbildung 6 zeigt die Entzugsleistung so einer Anlage für die ersten hundert Tage
Betriebszeit. Dabei wurden plausibleWerte für dieModellparametergewählt.
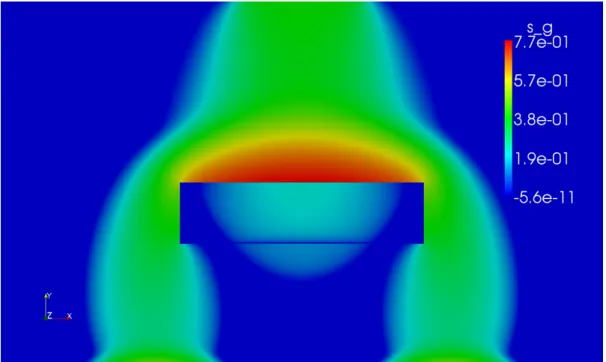
Shadstoausbreitung
Als weiteres Beispiel nennen wir die Modellierung und Simulation einer Shadsto-
ausbreitungimBoden,siehe Abbildung8.DerShadstowird hieralsnihtmitWasser
mishbar und shwerer als Wasser angenommen (Bestimmte Reinigungsmittel haben
diese Eigenshaften).
•
Wo erreiht der Shadsto welhe Konzentrationen?•
Wiebekommt man den Shadsto wieder weg?•
Wohin bewegt sihgelöster Shadsto?300000 400000 500000 600000 700000 800000 900000 1e+06 1.1e+06 1.2e+06 1.3e+06
0 10 20 30 40 50 60 70 80 90 100
Entzugsleistung [Watt]
Zeit [Tage]
Entzugsleistung im kalibrierten System
Abbildung7:Entzugsleistung der Geothermieanlage über die Zeit für bestimmte
Systemparameter.
1.3 Inhaltsübersiht der Vorlesung
Wirwerden in dieser Vorlesung diefolgendenThemengebiete behandeln:
•
Grundbegrie, Gleitpunktzahlen, Gleitpunktarithmetik•
DirekteMethoden zur Lösung linearer Gleihungssysteme•
Interpolationund Approximation•
Numerishe Integration•
Iterationsverfahren zur Lösung linearerGleihungssysteme•
Iterationsverfahren zur Lösung nihtlinearerGleihungssysteme•
Eigenwerte und EigenvektorenAusblikauf weiterführende Vorlesungen
•
GewöhnliheDierentialgleihungenbeshreibenvielezeitabhängigeProzesse(Nu- merik1).Abbildung 8:Ausbreitung eines niht Wasser niht mishbaren Shadstoes im Boden.
•
Praktishe Anwendungenführen oftauhaufpartielleDierentialgleihungen.Ge- suht sind dannFunktionen inmehreren Raumdimensionen(Numerik 2).•
Tehnishe Anwendungen erfordern Optimierung (Numerik 3).•
Eziente Programmierung und Visualisierung der Ergebnisse sind sehr wihtig (z.B.Objektorientiertes ProgrammierenimWissenshaftlihen Rehnen).2 Gleitpunktzahlen
Zahlen im Computer
Alle Programmiersprahen stellen elementare Datentypen zur Repräsentation von
Zahlenzur Verfügung. In C/C++:
unsigned int , unsigned short , unsigned long
N 0
int , short , long
Z
float, double
R
omplex< float >, omplex<double>
C
Diese sind Idealisierungen der Zahlenmengen
N 0 , Z , R , C
.Beiunsigned int ,int...bestehtdieIdealisierungdarin,dasseseinegröÿte(bzw.kleinste)
darstellbareZahl gibt. Ansonsten sind dieErgebnisse exakt.
Bei float und double kommt hinzu, dass die meisten innerhalb des erlaubten Bereihs
liegenden Zahlennur näherungsweise dargestellt werden können.
2.1 Beispiel zur Fehlerakkumulation
Potenzreihe für
e x
• e x
lässt sihmiteiner Potenzreihe berehnen:e x = 1 + X ∞
n=1
x n
n! = 1 + X ∞
n=1
y n .
•
Diesformulierenwir rekursiv:y 1 = x, S 1 = 1 + y 1 ,
(Anfangswerte).Rekursion:
y n = x
n y n − 1 , S n = S n − 1 + y n .
•
Probierevershiedene Genauigkeiten und Werte vonx
.Positives Argument
•
Fürx = 1
und float-Genauigkeiterhalten wir:1.000000000000000e+00 1 2.000000000000000e+00
5.000000000000000e-01 2 2.500000000000000e+00
1.666666716337204e-01 3 2.666666746139526e+00
4.166666790843010e-02 4 2.708333492279053e+00
8.333333767950535e-03 5 2.716666936874390e+00
1.388888922519982e-03 6 2.718055725097656e+00
1.984127011382952e-04 7 2.718254089355469e+00
2.480158764228690e-05 8 2.718278884887695e+00
2.755731884462875e-06 9 2.718281745910645e+00
2.755731998149713e-07 10 2.718281984329224e+00
0.000000000000000e+00 100 2.718281984329224e+00
ex 2.718281828459045e+00
...also7 gültigeZiern.
•
Fürx = 5
...9.333108209830243e-06 21 1.484131774902344e+02
ex 1.484131591025766e+02
...dito.
Negatives Argument
•
Fürx = − 1
und float -Genauigkeiterhalten wir:2.755731998149713e-07 10 3.678794205188751e-01
-2.505210972003624e-08 11 3.678793907165527e-01
2.087675810003020e-09 12 3.678793907165527e-01
ex 3.678794411714423e-01
...6 gültigeZiern.
•
Fürx = − 5
-5.000000000000000e+00 1 -4.000000000000000e+00
1.250000000000000e+01 2 8.500000000000000e+00
-2.083333396911621e+01 3 -1.233333396911621e+01
2.604166793823242e+01 4 1.370833396911621e+01
-2.333729527890682e-02 15 1.118892803788185e-03
7.292904891073704e-03 16 8.411797694861889e-03
1.221854423194557e-10 28 6.737461313605309e-03
0.000000000000000e+00 100 6.737461313605309e-03
ex 6.737946999085467e-03
nurnoh 4 gültigeZiern!
Noh kleineres Argument
•
Fürx = − 20
und float-Genauigkeitsind ... -2.000000000000000e+01 1 -1.900000000000000e+012.000000000000000e+02 2 1.810000000000000e+02
-1.333333374023438e+03 3 -1.152333374023438e+03
6.666666992187500e+03 4 5.514333496093750e+03
-2.666666796875000e+04 5 -2.115233398437500e+04
-2.611609750000000e+06 31 -1.011914250000000e+06
1.632256125000000e+06 32 6.203418750000000e+05
-9.892461250000000e+05 33 -3.689042500000000e+05
5.819095000000000e+05 34 2.130052500000000e+05
-3.325197187500000e+05 35 -1.195144687500000e+05
1.847331718750000e+05 36 6.521870312500000e+04
-4.473213550681976e-07 65 7.566840052604675e-01
1.355519287926654e-07 66 7.566841244697571e-01
-4.046326296247571e-08 67 7.566840648651123e-01
1.190095932912527e-08 68 7.566840648651123e-01
ex 2.061153622438557e-09
keine Ziern mehr gültig. Das Ergebnisist um 8 Gröÿenordnungen daneben!
Erhöhen der Genauigkeit
•
Fürx = − 20
und double-Genauigkeiterhält man -1.232613988175268e+07 27 -5.180694836889297e+068.804385629823344e+06 28 3.623690792934047e+06
1.821561256740375e-24 94 6.147561828914626e-09
-3.834865803663947e-25 95 6.147561828914626e-09
ex 2.061153622438557e-09
Immernohum einen Faktor 3daneben!
•
Erst mitvierfaher Genauigkeit erhältman7.0937168371834023136209731491427e-42 118 2.0611536224385583392700458752947e-09
ex 2.0611536224385578279659403801558e-09
15gültige Ziern(beia 30Ziern Rehengenauigkeit).
Fragen
•
Was bedeutet überhaupt Rehengenauigkeit?•
Welhe Genauigkeitkönnen wir erwarten?•
Wo kommen diese Fehler her?•
Wiewerden solhe Kommazahlen dargestellt und verarbeitet?ObigeBerehnungenwurdenmitdenPaketenqdundarpre(beidehttp://rd. lbl.
gov/ ~dhbailey/mpdist/ )durhgeführt.qderlaubtbiszuvierfahedoubleGenauigkeit,
arpre beliebige Genauigkeit. Die GNU multipreision library (http://gmplib.org/ )
isteine Alternative.
3 Gauÿelimination
Algorithmus 4.1 (Gauÿ-Elimination)
Input:
A ∈ R n × n
,
b ∈ R n
Output:
x ∈ R n
for (
k = 1
;k < n
;k = k + 1
) doFinde
r ∈
{k,...,n} so dassa rk 6 = 0
;(sonst Fehler);if (
r 6 = k
) then {taushe Zeilek
mitZeiler
}for (
j = k
;j ≤ n
;j = j + 1
)dot = a kj
;a kj = a rj
;a rj = t
;end for
t = b k
;b k = b r
;b r = t
;endif
{Update der unteren Zeilen}
for (
i = k + 1
;i ≤ n
;i = i + 1
)doq = a ik /a kk
;for (
j = k + 1
;j ≤ n
;j = j + 1
) doa ij = a ij − q · a kj
;end for
b i = b i − q · b k
;endfor
{Rükwärtseinsetzen}
for (
k = n
;k ≥ 1
;k = k − 1
) dot = 0
;for (
j = k + 1
;j ≤ n
;j = j + 1
)dot = t + a kj · x j
;endfor
x k = (b k − t)/a kk
end for
Beispiel 4.2
Hier sind keine Zeilenvertaushungen notwendig. Das Pivotelement ist jeweils durh
einenKasten gekennzeihnet.
2 4 6 8 40
16 33 50 67 330 4 15 31 44 167 10 29 63 97 350
→
2 4 6 8 40
0 1 2 3 10
0 7 19 28 87 0 9 33 57 150
→
2 4 6 8 40 0 1 2 3 10 0 0 5 7 17 0 0 15 30 60
→
2 4 6 8 40 0 1 2 3 10 0 0 5 7 17 0 0 0 9 9
Shlieÿlihliefert Rükwärtseinsetzen:
x 4 = 9/9 = 1 , x 3 = (17 − 7 · 1)/5 = 2 ,
x 2 = (10 − 2 · 2 − 3 · 1)/1 = 3 , x 1 = (40 − 4 · 3 − 6 · 2 − 8 · 1)/2 = 4 .
Algorithmus 4.7.1 zur LR-Zerlegung
Input:
A ∈ R n × n
,
b ∈ R n
(wird übershrieben) Output:L ∈ R n × n in a ij , j < i, l ii = 1
implizitR ∈ R n × n in a ij , j ≥ i
p : { 0, . . . , n − 1 } → { 0, . . . , n − 1 }
for (
k = 1
;k < n
;k = k + 1
) doFinde
r ∈
{k,...,n} so dassa rk 6 = 0
;(sonst Fehler);if (
r 6 = k
) then {taushe Zeilek
mitZeiler
}for (
j = 1
;j ≤ n
;j = j + 1
) dot = a kj
;a kj = a rj
;a rj = t
;end for
endif
p k = r
; {merkePermutation}{Update der unteren Zeilen}
for (
i = k + 1
;i ≤ n
;i = i + 1
)doa ik = a ik /a kk
;for (
j = k + 1
;j ≤ n
;j = j + 1
) doa ij = a ij − a ik · a kj
;end for
endfor
end for
{Permutation von
b
}for (
k = 1
;k < n
;k = k + 1
) doif (
p k 6 = k
)thent = b k
;b k = b p k
;b p k = t
;endif
end for
{Vorwärtseinsetzen}
for (
k = 1
;k ≤ n
;k = k + 1
)dot = 0
;for (
j = 1
;j < k
;j = j + 1
) dot = t + a kj · x j
;endfor
x k = b k − t
;end for
{Rükwärtseinsetzen}
for (
k = n
;k ≥ 1
;k = k − 1
) dot = 0
;for (
j = k + 1
;j ≤ n
;j = j + 1
)dot = t + a kj · x j
;endfor
x k = (x k − t)/a kk
;end for
Algorithmus 4.7.2 zur LR-Zerlegung (Andere Permutation)
Input:
A ∈ R n × n
,b ∈ R n
(wird übershrieben) Output:L ∈ R n × n in a ij , j < i, l ii = 1
implizitR ∈ R n × n in a ij , j ≥ i
p : { 0, . . . , n − 1 } → { 0, . . . , n − 1 }
for (
k = 1
;k ≤ n
;k = k + 1
)dop k = k
;end for
for (
k = 1
;k < n
;k = k + 1
) doFinde
r ∈
{k,...,n} so dassa rk 6 = 0
;(sonst Fehler);if (
r 6 = k
) then {taushe Zeilek
mitZeiler
}for (
j = 1
;j ≤ n
;j = j + 1
) dot = a kj
;a kj = a rj
;a rj = t
;end for
t = p k
;p k = p r
;p r = t
;endif
{Update der unteren Zeilen}
for (
i = k + 1
;i ≤ n
;i = i + 1
)doa ik = a ik /a kk
;for (
j = k + 1
;j ≤ n
;j = j + 1
) doa ij = a ij − a ik · a kj
;end for
endfor
end for
{Permutation von
b
}for (
k = 1
;k ≤ n
;k = k + 1
)dox k = b p k
;end for
{Vorwärtseinsetzen}
for (
k = 1
;k ≤ n
;k = k + 1
)dot = 0
;for (
j = 1
;j < k
;j = j + 1
) dot = t + a kj · x j
;endfor
x k = x k − t
;end for
{Rükwärtseinsetzen}
for (
k = n
;k ≥ 1
;k = k − 1
) dot = 0
;for (
j = k + 1
;j ≤ n
;j = j + 1
)dot = t + a kj · x j
;endfor
x k = (x k − t)/a kk
;end for
Algorithmus 4. zu LS with QR-Zerlegung
Input:
x ∈ R n
,j ∈ N +
Output:
v ∈ R n
HouseholderVetor(
x
,j
)begin
n = length(x)
;v = 0
;µ = 0
;for (
k = j
;k ≤ n
;k = k + 1
) doµ = µ + x k ∗ x k
;v k = x k
;end for
if (
µ 6 = 0
) thenβ = x 1 + sign(x 1 )µ
;for (
k = j + 1
;k ≤ n
;k = k + 1
) dov k = v k /β
;end for
end if
v 1 = 1
return
v
;end
Algorithmus 4. zu LS with QR-Zerlegung
Input:
A ∈ R m × n
,v ∈ R m
Output:
A ∈ R m × n
(wird übershrieben)
HouseholderMultiplikation(
A
,v
)begin
β = − 2/(v T v)
;w = βA T v
;A = A + vw T
;end
Algorithmus 4. zu LS with QR-Zerlegung
Input:
A ∈ R m × n
Output:
n
Vektorenv (k) ∈ R m × n in a ij , j < i, v 1 (k) = 1
implizitR ∈ R m × n in a ij , j ≥ i
HouseholderQR(
A
)begin
for
j = 1
;j ≤ n
;j = j + 1
dov k
w = βA T v
;A = A + vw T
;end for
end
4 Interpolation und Approximation
4.1 Motivation
Die Abbildungen 9 bis11 zeigen eine Anwendung von Polynomen bei der Kurvenkom-
pressionin der Computergraphik.
DieLage einesstarrenKörpers imRaumwird durh6Zahlenfestgelegt(3fürdiePo-
sitionund3fürdieOrientierung),diesihmitderZeitändernkönnen.Eineäquidistante
Shrittweite erforderteinenhohenSpeiheraufwand,umbeishnellenPositionsänderun-
gen eine gute Genauigkeit erreihen zu können. Bei einer adaptiven Shrittweitenwahl
werden möglihst wenig Zeitpunkte ausgewählt, aber so, dass ein vorgegebener Fehler
niht übershritten wird. Diese Anwendung haben Eri Shneider, Manuel Jerger und
BenjaminJillihimRahmeneines Software-Praktikums imSommersemester 2008erar-
beitet (Vielen Dank für dietollen Bilder!).
4.2 Polynominterpolation
Die Abbildung12zeigt dieMonome bis zum Grad 6.
Abbildung13zeigtdieLagrange-PolynomevomGrad6beiäquidistanten Stützstellen
auf
[0, 1]
.Zu interpolieren seidie folgendeWertetabellemit 4Einträgen:
x i y i
0 1.0000 2 0.4546 7 0.0938 10 − 0.0544
Abbildung14zeigtdaszugehörigeInterpolationspolynomsowiedieskaliertenLagrange-
Polynome
y i L (3) i
.Abbildung16illustriertdasWahsender Lagrange-PolynomeweitwegvonderStütz-
stelle
x
an derL (n)(x) i = 1
gilt.Beispiel 5.8 zur numerishen Dierentiation
Wir wollen die zweite Ableitung von
f(x) = sinh(x)
fürx = 0.6
mit dem zweitenDierenzenquotient ermitteln:
d 2
dx 2 sinh(x) ≈ sinh(x + h) − 2 sinh(x) + sinh(x − h)
h 2
Abbildung 9:Kurvenkompression in der Computergraphik: Die Szene.
Abbildung10:KurvenkompressioninderComputergraphik:Stützpunktederunkompri-
mierten Kurve.
Abbildung11:Kurvenkompression in der Computergraphik: Stützpunkte der kompri-
mierten Kurve.
0 0.2 0.4 0.6 0.8 1 1.2
0 0.2 0.4 0.6 0.8 1
y
x i=0
i=1 i=2 i=3 i=4 i=5 i=6
Abbildung 12:Die Monome biszum Grad 6.
zur Erinnerung:
sinh(x) = 1
2 (e x − e − x ), d
dx sinh = cosh = 1
2 (e x + e − x ), d 2
dx 2 sinh(x) = sinh(x).
Mit double Genauigkeit erhältman den Wert
sinh(0.6) = 6, 366535821482 · 10 − 1 .
Dagegen liefertdie numerishe Dierentiation diefolgende Tabelle
h
Dierenzenquotient1 · 10 − 1 6.371 · 10 − 1 1 · 10 − 2 6.3665888 · 10 − 1 1 · 10 − 3 6.366536352 · 10 − 1 1 · 10 − 4 6.3665358540 · 10 − 1
1 · 10 − 5 6.3665017 · 10 − 1
Auslöshung1 · 10 − 6 6.3671 · 10 − 1
.
.
.
1 · 10 − 10 1.1102 · 10 4 !
-1.5 -1 -0.5 0 0.5 1 1.5
0 0.2 0.4 0.6 0.8 1
y
x
i=0 i=1 i=2 i=3 i=4 i=5 i=6
Abbildung13: DieLagrange-Polynome
L (6) i (x)
vomGrad 6.NumerisheDierentationistsehranfälliggegenüberRundungsfehlern. Möglihe Ab-
hilfebietet dieExtrapolation.
4.3 Spline Interpolation
Wirbetrahten dieInterpolation der folgendendrei Funktionen
f 1 (x) = exp( − x 2 )
in[ − 10, 10],
(8)f 2 (x) =
cos 2 (x) | x | < π / 2
0 | x | ≥ π / 2
in
[ − π, π],
(9)f 3 (x) =
− 1 x < 1 / 2
+1 x ≥ 1 / 2
in[0, 1],
(10)mittelsPolynomen,
S h 1,0
undS h 3,2
(mit natürlihen Randbedingungen).0 0.2 0.4 0.6 0.8 1
y
f1(x)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
y
f2(x)
-1 -0.5 0 0.5 1
y
f3(x)
-0.4 -0.2 0 0.2 0.4 0.6 0.8 1
0 2 4 6 8 10
y
x
Interpolationspolynom p
p y0*L0 y1*L1 y2*L2 y3*L3 Daten
Abbildung 14:Interpolationspolynom zur Wertetabelleaus Beispiel .
Die Abbildung17 zeigt dieInterpolation der Funktion
f 1 (x)
.Die Abbildung18 zeigt dieInterpolation der Funktion
f 2 (x)
.Die Abbildung19 zeigt dieInterpolation der Funktion
f 3 (x)
.Wir lernen:
•
InterpolationmitPolynomensteigendenGradesanäquidistantenStützstellenshlägt inallen Fällenfehl, d.h. der Interpolationsfehler steigt mitdem Grad an.•
KubisheSplineskonvergieren undlieferneinenglattenVerlauf.Allerdingskommt es zu mögliherweise unphysikalishen Unter- bzw. Übershwingern. Diese sindaberimFalle von
f 3 (x)
um dieSprungstelle lokalisiert.•
Stükweise lineareFunktionen haben diesen Defekt niht.Wir wollen nun den Interpolationsfehler noh experimentell bestimmen.
Fehler bei Interpolation der Funktion
f 1 (x) = e − x 2
:-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
0 1 2 3 4 5 6
y
x
Polynominterpolation von f(x) = sin(2x)
sin(2*x) n=4 n=5 n=12
-4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1
-4 -2 0 2 4
y
x
Polynominterpolation von f(x) = 1/(1+x*x)
1.0/(1.0+x*x) n=4 n=8 n=12
Abbildung15:Interpolation der Funktionen
sin(2x)
(oben) und1+x 1 2
(unten) mit äqui-distanten Stützstellen und vershiedenen Polynomgraden.
-3 -2 -1 0 1 2 3 4 5 6 7
0 0.2 0.4 0.6 0.8 1
y
x
Lagrange Polynome mit steigendem Grad i=2, n=4 i=3, n=6 i=4, n=8 i=5, n=10
-200 -150 -100 -50 0 50 100
0 0.2 0.4 0.6 0.8 1
y
x
Lagrange Polynome mit steigendem Grad i=5, n=10 i=6, n=12 i=7, n=14 i=8, n=16
Abbildung16: Die Lagrange-Polynome
L (n) n/2
fürn = 4, 6, 8, 10, 12, 14, 16
.n S h 1,0 S h 3,2 P n
4 6.045 e − 01 7.420 e − 01 8.038 e − 01 6 4.447 e − 01 5.612 e − 01 9.999 e − 01 8 3.002 e − 01 3.918 e − 01 2.311 e + 00 10 1.774 e − 01 2.464 e − 01 5.949 e + 00 16 1.060 e − 01 2.753 e − 02
32 6.946 e − 02 7.083 e − 03 64 2.241 e − 02 3.316 e − 04 128 5.974 e − 03 1.918 e − 05 256 1.517 e − 03 1.173 e − 06 512 3.809 e − 04 7.289 e − 08 1024 9.533 e − 05 4.549 e − 09
Angegeben ist der maximale Fehler an einem Punkt. Polynome konvergieren niht.
Stükweise linear konvergiert mit
h 2
(d. h.e 2n /e n = ( 1 / 2 ) 2
), kubishe Splines mith 4
(d. h.
e 2n /e n = ( 1 / 2 ) 4
).InbeidenFällengiltdiesnur,wenn
n
genügendgroÿ,mansprihtvonasymptotisher Konvergenz.Fehler bei Interpolation der Funktion
f 2 (x) =
cos 2 (x) x < π / 2 0 x ≥ π / 2
:n S h 1,0 S h 3,2
4 1.052e − 01 1.649e − 01 8 1.052e − 01 4.498e − 02 16 3.518e − 02 8.434e − 03 32 9.423e − 03 1.945e − 03 64 2.396e − 03 4.764e − 04 128 6.015e − 04 1.184e − 04 256 1.505e − 04 2.958e − 05 512 3.764e − 05 7.394e − 06 1024 9.412e − 06 1.848e − 06
In diesem Fall konvergiert der maximale Fehler auh im Falle kubisher Splines nur
mit
h 2
.Dies liegt daran, dass
f 2 ′′ (x)
unstetigamPunktx = π / 2
ist(springt von 2 auf0).Die dritte Ableitungexistiert niht mehr.
Für dieInterpolationmitstükweisen Polynomen merken wir uns:
Jehöherder(abshnittsweise)PolynomgradumsoshnellerkonvergiertdasVerfahren.
Imallgemeinen erhält man
O(h k+1 )
Konvergenz für Polynome vom Gradk
.Dies giltallerdingsnurdann, wenndiezu interpolierende Funktiongenügendof die-
renzierbarist. Istdies nihtder Fallso lohntalsoauhdieVerwendung vonPolynomen
4.4 Praktishes zur Diskreten Fourier Analyse
Abbildung 20 zeigt einige Beispiele für Spektren. Die Konstante im Zeitbereih hat
einen Puls alsSpektrum. Umgedreht hat ein Puls im Ortsbereih einkonstantes Spek-
trum.Shlieÿlihwird nohdas Spektrumeines Dreieks- bzw. Rehteksignals gezeigt.
Abbildung21zeigtdieInterpolationvonDreik-bzw.Rehteksignal beiVorgabevon
jeweilsaht Datenpunkten.
Abbildung 22 illustriert die Verbesserung der Annäherung an die zu interpolierende
Funktionbeisteigendem Parameter
n
.Abbildung22illustriertdieVerbesserungder AnnäherungbeiunstetigenFunktionen,
wenn an der Sprungstelle der Mittelwert vorgeshrieben wird. Wir verwenden einmal
n = 15
(Sprungstelleist Interpolationspunkt, Mittelwert wird vorgeshrieben) undn = 16
(Sprungstelleist kein Interpolationspunkt).-8000 -6000 -4000 -2000 0 2000 4000 6000
-200 -150 -100 -50 0 50 100 150 200
y
x
4.5 Gauÿ-Approximation
Beispiel 5.23: Fourierreihe
Für
N = 2m + 1, m ∈ N
istΨ F = n
√ 1
2π , 1
√ π cos(x), . . . , 1
√ π cos(mx),
√ 1
π sin(x), . . . , 1
√ π sin(mx)
eine OrthonormalbasisvonFunktionenauf dem Intervall
[ − π, π]
.Damit giltdann:
g (x) = a 0 2 +
X m
k=1
{ a k cos(kx) + b k sin(kx) }
und
a k = 1 π
Z π
− π
f (x) cos(kx)dx, k = 0, . . . , m
b k = 1 π
Z π
− π
f (x) sin(kx)dx, k = 1, . . . , m
FürunendlihvieleGlieder(
m = ∞
)nenntman dieReihe Fourier-Reihe.Diesekonver- giert gegenein Element ausL 2 ( − π, π)
.Beispiel 5.24: Finite-Elemente Diskretisierung
Die numerishe Lösung der partiellenDierentialgleihung
∂ 2 u
∂x 2 + ∂ 2 u
∂y 2 = f in Ω
(Poisongleihung) mitHilfe der Methode der Finiten-Elementeführtauf dieAufgabe:
Finde
u ∈ S
, so dassZ
Ω
∇ u · ∇ ϕdx = Z
Ω
f ϕdx ∀ ϕ ∈ S
5 Quadratur
5.1 Newton-Cotes Formeln
Wirbetrahten folgendebestimmteIntegrale:
(i)
Eine einfahe, unendlihoft dierenzierbare Funktion:Z π / 2 0
sin(x) dx = 1.
(ii)
Eine glatte Funktionaber mitgroÿen höheren Ableitungen:Z 1
− 1
1
10 − 5 + x 2 dx = 9.914588332462438 · 10 2 . (iii)
Eine niht unendlih oft dierenzierbareFunktion (Halbkreis):Z 1
− 1
√ 1 − x 2 dx = π / 2 .
Summierte Trapezregelfür
(i)
.I
Fehler #Fktausw.9.480594489685199e-0 1 5.1941e-02 3
9.871158009727754e-0 1 1.2884e-02 5
9.967851718861696e-0 1 3.2148e-03 9
9.991966804850723e-0 1 8.0332e-04 17
9.997991943200188e-0 1 2.0081e-04 33
9.999498000921015e-0 1 5.0200e-05 65
9.999874501175253e-0 1 1.2550e-05 129
9.999968625352869e-0 1 3.1375e-06 257
9.999992156341920e-0 1 7.8437e-07 513
...
9.999999999995609e-0 1 4.3909e-13 524289
1.000000000003847e+00 3.8467e-12 1048577
Fehlervierteltsihjeweils,unddasvonAnfangan.Wenigerals
10 − 13
wirdmitdoubleGenauigkeitniht erreiht.
Summierte Simpsonregelfür
(i)
.I
Fehler #Fktausw.1.000134584974194e+00 1.3458e-04 5
1.000008295523968e+00 8.2955e-06 9
1.000000516684706e+00 5.1668e-07 17
1.000000032265001e+00 3.2265e-08 33
1.000000002016129e+00 2.0161e-09 65
1.000000000126001e+00 1.2600e-10 129
1.000000000007874e+00 7.8739e-12 257
1.000000000000491e+00 4.9094e-13 513
1.000000000000030e+00 2.9976e-14 1025
1.000000000000006e+00 5.7732e-15 2049
1.000000000000002e+00 1.7764e-15 4097
Fehler reduziert sih jeweilsum den Faktor
16 = ( 1 / 2 ) 4
,und das fast von Anfangan.Summierte Trapezregelfür
(ii)
.I
Fehler #Fktausw.1.000009999900001e +05 9.9010e+04 3
5.000449983500645e +04 4.9013e+04 5
2.501113751079469e +04 2.4020e+04 9
1.252430268327760e +04 1.1533e+04 17
6.300548144658167e +03 5.3091e+03 33
3.227572909110977e +03 2.2361e+03 65
1.765586982280199e +03 7.7413e+02 129
1.160976493727309e +03 1.6952e+02 257
1.003813438906513e +03 1.2355e+01 513
9.915347090712996e +02 7.5876e-02 1025
9.914588358257512e +02 2.5795e-06 2049
9.914588331667655e +02 7.9478e-08 4097
9.914588332263689e +02 1.9875e-08 8193
9.914588332412698e +02 4.9740e-09 16385
Fehlerverhalten am Anfangunklar, erst spät stellt sih
h 2
ein.Summierte Simpsonregelfür
(ii)
.I
Fehler #Fktausw.3.333899978334190e +04 3.2348e+04 5
1.668001673605744e +04 1.5689e+04 9
8.362024407438566e +03 7.3706e+03 17
4.225963298451690e +03 3.2345e+03 33
2.203247830595247e +03 1.2118e+03 65
1.278258340003273e +03 2.8680e+02 129
9.594396642096787e +02 3.2019e+01 257
9.514257539662473e +02 4.0033e+01 513
9.874417991262286e +02 4.0170e+00 1025
9.914335447439017e +02 2.5289e-02 2049
9.914588322804369e +02 9.6581e-07 4097
9.914588332462367e +02 7.0486e-12 8193
9.914588332462367e +02 7.0486e-12 16385
Bis 4096 Auswertungen ist Simpson shlehter als Trapez. Asymptotishe Konver-
genzrate stellt sih erst für genügendkleines
h
ein.Summierte Trapezregelfür
(iii)
.I
Fehler #Fktausw.1.000000000000000e+00 5.7080e-01 3
1.366025403784439e+00 2.0477e-01 5
1.497854534051220e+00 7.2942e-02 9
1.544909572178587e+00 2.5887e-02 17
1.561626518913870e+00 9.1698e-03 33
1.567551211438566e+00 3.2451e-03 65
1.569648456389842e+00 1.1479e-03 129
1.570390396198308e+00 4.0593e-04 257
1.570652791478614e+00 1.4354e-04 513
1.570745576359828e+00 5.0750e-05 1025
1.570778383269506e+00 1.7944e-05 2049
1.570789982705718e+00 6.3441e-06 4097
1.570794083803873e+00 2.2430e-06 8193
1.570795533774854e+00 7.9302e-07 16385
Die Konvergenzordnung
h 2
wird niht erreiht, sondern nur einh α
mitα < 2
(sieheunten).
Summierte Simpsonregelfür
(iii)
.I
Fehler #Fktausw.1.488033871712585e+00 8.2762e-02 5
1.541797577473481e+00 2.8999e-02 9
1.560594584887709e+00 1.0202e-02 17
1.567198834492299e+00 3.5975e-03 33
1.569526108946797e+00 1.2702e-03 65
1.570347538040268e+00 4.4879e-04 129
1.570637709467796e+00 1.5862e-04 257
1.570740256572051e+00 5.6070e-05 513
1.570776504653564e+00 1.9822e-05 1025
1.570789318906069e+00 7.0079e-06 2049
1.570793849184461e+00 2.4776e-06 4097
1.570795450836595e+00 8.7596e-07 8193
1.570796017098507e+00 3.0970e-07 16385
Die Simpsonregelzeigt dieselbe Konvergenzordnung wie dieTrapezregel!
Konvergenzabshätzung hat dieForm
| I (f ) − I h (n) (f ) | ≤ Ch m+1 .
Experimentelle Bestimmung der Konvergenzrate:
Mit dem Ansatz
e h = | I(f) − I h (n) (f ) | = Ch α
gilte h / 2
e h
= C( h / 2 ) α
Ch α = ( 1 / 2 ) α
und darauserhalten wir
α = log e h / 2
e h
log 1
2
.
Das sobestimmte
α
heiÿt experimental order of onvergene (EOC).5.2 Fehlerkontrolle
WirhabeninSatz6.4gezeigt,wiederFehlermitmehrStützstellenabnimmt.Diesnennt
man eine a-priori Fehlershranke.
So erhalten wir etwa für diesummierte Trapezregel:
| I(f) − I h (1) (f ) | = | − b − a
12 f ′′ (ξ)h 2 | ≤ b − a 12 max
ξ ∈ [a,b] | f ′′ (ξ) |
| {z }
=:C
h 2 .
C
ist allerdingsimallgemeinen shwer zu bestimmen.In der Praxis würde man aber gerne wissen, bei wievielen Stützstellen (bei welhem
h
)der Fehler kleiner alseine vorgegebene Toleranz ist.Dazu wollen wir eine Methode zur a-posteriori Fehlershätzung vorstellen.
Idee: Die Simpson-Summe konvergiert shneller als die Trapezsumme (
f
genügendglatt),hat also fürgenügend kleines
h
einen kleineren Fehler.Wir wollen den Fehler inder Trapezsumme zum Gitter
h/2
abshätzen. Dazu shie-ben wir dieAuswertung der Simpsonsumme dazwishen:
| I (f) − I (1) h 2
(f) | = | I(f) − I h (2) (f ) + I h (2) (f ) − I (1) h 2
(f ) | .
Nunnutze die Dreieksungleihung:
| I (f ) − I (1) h 2
(f) | ≤ | I(f ) − I h (2) (f ) | + | I h (2) (f ) − I (1) h 2
(f ) | .
Nunnimmtmanan,dassdieSimpsonsummegenaueristalsdieTrapezsumme:
| I(f ) − I h (2) (f) | ≤ ω | I(f) − I (1) h
2
(f) |
mit0 < ω < 1
:| I(f) − I (1) h 2
(f ) | ≤ ω | I(f ) − I (1) h 2
(f ) | + | I h (2) (f) − I (1) h 2
(f ) | .
Auösennah dem Fehler inder Trapezsumme liefert:
| I(f ) − I (1) h 2
(f ) | ≤ 1
1 − ω | I h (2) (f ) − I (1) h 2
(f) | .
Algorithmishe Realisierung der Fehlerkontrolle
Besonders ökonomish lässt sih die Fehlerkontrolle realisieren, wenn man folgende
BeziehungenzwishenSimpson-Rgel,MittelpunktregelundTrapezregelbenutzt(deshalb
haben wir oben die Trapezregelzu
h/2
und die Simpsonsumme zuh
verwendet):DiesummierteSimpson-RegellässtsihaussummierterTrapez-undMittelpunktregel
zusammensetzen:
I h (2) (f ) = 1
3 I h (1) (f ) + 2
3 I h (0) (f ).
Die summierteTrapezregel zu demnähst feineren Gittererhält manaus summierter
Trapez- und Mittelpunktregel des gröberen Gitters:
I (1) h 2
= 1
2 I h (1) (f ) + 1
2 I h (0) (f ) h = b − a
;N = 1
;I1 = h(f(a) + f(b))/2
;while (
h > ε
) doI0 = 0
;for (
i = 0
,i < N
,i = i + 1
) doI 0 = I0 + hf (a + (i + 0.5)h)
; {Mittelpunktsumme}endfor
I2 = 1 3 I1 + 2 3 I0
;{Simpson-Summe zuh
}I1 = 1 2 I1 + 1 2 I0
;{Trapez-Summe zuh/2
}h = 1 2 h
;N = 2N
;if (
1
1 − ω (I2 − I1) ≤ T OL
) thenreturn
I1
; {Liefere Trapez-Summe zuh
}endif
end while
Die Fehlerkontrolle lässt sih soohne zusätzlihen Aufwand erledigen.
5.3 Gauÿ- und adaptive Quadratur
Adaptive Quadratur
Quadratur mit konstanter Shrittweite ist bei manhen Integranden inezient. Be-
trahte z. B.
f(x) = 10 − 5 1 +x 2
.0 20000 40000 60000 80000 100000
-1 -0.5 0 0.5 1
1/((1e-5)+(x**2))
In soeinem Fallmöhte man die Shrittweite adaptiv, d. h. angepasst an den spe-
ziellenIntegranden wählen.
Dazu bedient man sih eines lokalen Fehlershätzers (oder Indikators), der angibt,
anwelher Stelle dieShrittweite weiter verkleinert werden muss.
Esbietetsihan,dies nohmiteinerFehlerkontrolle zukombinieren.Grob ergibtsih
das folgende Vorgehen:
(1) Wähle eine Unterteilung
G 0 = { x (0) i | i = 0, . . . , N 0 }
. Berehne das IntegralI 0
bezüglih der Unterteilung
G 0
. Setzek = 0
.(2) Berehne eine Shätzung für den Fehler
E k
inI k
.FallsE k < T OL
sind wir fertig.(3) Verfeinere dieUnterteilung
G k
zuG k+1
durh HinzufügenvonPunkten angepasstanden Integranden und setze
k = k + 1
.(4) Berehne
I k
zuG k
und gehe nah(2).Prinzip von Arhimedes
Wir betrahten das Prinzip vonArhimedes 2
:
2
ArhimedesvonSyrakus,287v.Chr.-212v.Chr.,griehisherMathematiker,PhysikerundIngenieur.
00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000
11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111 0000000000000000000
0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000
1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111
00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000 00000000000000000000000000000000000000
11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111 11111111111111111111111111111111111111
0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000 0000000000000000000
1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111 1111111111111111111
0 0 1 1
a b = x l
f(x)
I 0
I 1
I 2 , negativ!
I 3
I 2 = 1 2
f (x m ) − f (x l ) + f (x r ) 2
| {z }
g
x r − x m + x m − x l
| {z }
h
x m
x r
g h
1. Berehne rekursiv
I(f ) = I 0 + I 1 + I 2 + I 3 + . . .
2. Brehe rekursiven Astab, falls
| I j |
kleingenug.Beispiel 6.8 zur numerishen Quadratur
Vershiedene Quadraturen für
(i)
aus letztem Beispiel.Methode
I
Fehler #Fktausw.Gauss4 9.999101667698898e-01 8.9833e-05 4
9.999944679581383e-01 5.5320e-06 8
9.999996555171785e-01 3.4448e-07 16
9.999999784895880e-01 2.1510e-08 32
Gauss6 1.000000118910998e+00 1.1891e-07 6
1.000000001828737e+00 1.8287e-09 12
1.000000000028461e+00 2.8461e-11 24
1.000000000000444e+00 4.4409e-13 48
Arhi 9.480594489685199e-01 5.1941e-02 3
9.871158009727754e-01 1.2884e-02 5
9.967851718861697e-01 3.2148e-03 9
9.990131153231707e-01 9.8688e-04 15
9.997876171856270e-01 2.1238e-04 31
Das Verfahren hoherOrdnung zahlt sih aus.
Methode
I
Fehler #Fktausw.Trapez 1.000009999900001e+05 9.9010e+04 3
3.227572909110977e+03 2.2361e+03 65
1.765586982280199e+03 7.7413e+02 129
1.160976493727309e+03 1.6952e+02 257
1.003813438906513e+03 1.2355e+01 513
9.915347090712996e+02 7.5876e-02 1025
9.914588358257512e+02 2.5795e-06 2049
Arhi 1.767335925226728e+03 7.7588e+02 25
1.004348965298925e+03 1.2890e+01 37
9.946212584262852e+02 3.1624e+00 81
9.922788393957054e+02 8.2001e-01 173
9.916266302474447e+02 1.6780e-01 361
9.914967844457766e+02 3.7951e-02 769
9.914672523966888e+02 8.4192e-03 1625
9.914606991793892e+02 1.8659e-03 3465
9.914592092819358e+02 3.7604e-04 7629
Fehlerreduktion mit Arhi ist von Anfang an quadratish, allerdings überholt die
Methode
I
Fehler #Fktausw.Gauss4 1.592226038754547e+00 2.1430e-02 4
1.570801362699711e+00 5.0359e-06 1024
1.570798107100650e+00 1.7803e-06 2048
1.570796956200537e+00 6.2941e-07 4096
1.570796549318533e+00 2.2252e-07 8192
Gauss6 1.578036347519909e+00 7.2400e-03 6
1.570801237513435e+00 4.9107e-06 768
1.570798062869299e+00 1.7361e-06 1536
1.570796940567470e+00 6.1377e-07 3072
1.570796543792309e+00 2.1700e-07 6144
Arhi 1.366025403784439e+00 2.0477e-01 5
1.570774639679624e+00 2.1687e-05 365
1.570791453003758e+00 4.8738e-06 765
1.570795219591928e+00 1.1072e-06 1605
1.570796082320714e+00 2.4447e-07 3433
Hohe Ordnung lohnt sihniht wegen mangelnder Dierenzierbarkeit.
5.4 Mehrdimensionale Quadratur
Für Rehteke (
d = 2
), Quader(d = 3
), ...lassen sih die Formelnfür die eindimensio- nale Integration leihterweitern:Z d c
Z b a
f (x, y) dxdy ≈ Z d
c
X n
i=0
w i f (x i , y) dy
= X n
i=0
w i
Z d c
f (x i , y) dx
≈ X n
i=0
w i
X n
j=0
w j f(x i , y j )
!
= X n
i=0
X n
j=0
w i w j
| {z }
w ij
f (x i , y j )
Koordinatentransformation
Allerdings sind niht alle Gebiete Rehteke (anders als in 1D!). Dann lassen sih
Integrale mittelsKoordinatentransformationberehnen:
Z
Ω
f(x, y)dx dy = Z 1
− 1
Z 1
− 1
f
ϕ(ξ, η), ψ(ξ, η)
∂(ϕ, ψ)
∂(ξ, η) dξdη
wobei dieTransformation
ϕ(ξ, η) ψ(ξ, η)
: [ − 1, 1] × [ − 1, 1] → Ω
das Gebiet
[ − 1, 1] × [ − 1, 1]
aufΩ
abbildet.1
−1
−1 1
η
ξ
φ(ξ, η) ψ(ξ, η)
x
y
Weiter ist
∂ (ϕ, ψ)
∂(ξ, η) = det
∂ϕ
∂ξ (ξ, η) ∂ψ ∂ξ (ξ, η)
∂ϕ
∂η (ξ, η) ∂ψ ∂η (ξ, η)
!
6
= 0
dieDeterminanteder (transponierten) Jaobimatrix 3
der Transformation.
Es lassen sih auh Simplizes(=Dreiek, Tetraeder) zur Unterteilung verwenden und
fürdiese direkte Integrationsformelnherleiten.
Komplexe Gebiete
Bei komplexen Gebieten, z. B. Gebieten mit Löhern oder einer komplizierten Geo-
metriereiht das niht.
⇒
Zerlegung inTeilgebiete, diesih aufRehteke transformieren lassen,aber:•
Gittergenerierung niht trivialund shwierig automatish zu mahen.•
ErfordertBeshreibung des GebietesΩ
.•
Zusätzliher Geometriefehlerdurhniht exakte Darstellungdes Gebietes.−1 −1 1
1
Ω
Auh inmehr als einer Raumdimensionenkann man hierarhishadaptiv verfeinern:
Links:AdaptivesDreieks- und Viereksgitter.Rehts: Adaptives Tetraedergitter mit
Bisektionsverfeinerung.
Fluh der Dimension
•
Istd
sehr groÿ,so sind diehier behandelten Methoden nihtbrauhbar.•
BetrahteΩ = [0, 1] d
. Zerlegt man[0, 1]
in zwei Teilintervalle je Rihtung, so hat man den d-dimensionalen Würfel in2 d
Teilwürfel zerlegt.⇒
Der Aufwand steigtexponentiellin
d
an. Dies bezeihnet man alsFlux der Dimension.•
Eine Möglihkeitist dann dieMonte-CarloIntegrationI(f) ≈ C N
X N
i=1
f (ξ i )
mitZufallszahlen
ξ i ∈ Ω
.6 Ein kleiner Programmierkurs
6.1 Hallo Welt
Programmierumgebung
•
Wirbenutzen dieProgrammiersprahe C++.•
Wirbehandeln nurdie Programmierungunter LINUXmitden GNUCompilern.•
Windows: On your own.•
Wirsetzen Grundfertigkeitim Umgang mitLINUX-Rehnern voraus:Shell, Kommandozeile,Starten von Programmen.
Dateien, Navigieren im Dateisystem.
Erstellen von Textdateien miteinem Editor ihrer Wahl.
•
Ideedes Kurses: Lernen anBeispielen,keine rigorose Darstellung.•
BlutigeAnfänger solltenzusätzlih einBuhlesen (siehe Literaturliste).Workow
C++ ist eine kompilierte Sprahe. Um ein Programm zur Ausführung zu bringen
sind folgendeShritte notwendig:
1. Erstelle/Ändereden Programmtext miteinemEditor.
2. Übersetze den Programmtextmitdem C++-Übersetzer(auhC++-Compiler)
ineinMashinenprogramm.
3. Führedas Programmaus. Das Programm gibt sein Ergebnis auf dem Bildshirm
oder ineine Dateiaus.
4. Interpretiere Ergebnisse. Dazu benutzen wir weitere Programme wie gnuplot.