Dr. Oliver B¨ar WS 2009/10
Einf¨ uhrung in die Allgemeine Relativit¨ atstheorie
Ubungsblatt 3 ¨
Ubung 3.1:¨ a) F¨ur zwei VektorenU, V ∈Tp(M) kann man die sogenannte Lie-Klammer definieren durch
[U, V] := ∇UV − ∇VU . (1)
Offensichtlich ist [U, V] wieder ein Vektor und es gilt [U, V] = −[V, U]. Wie lauten die Komponenten [U, V]a von [U, V]?
b) F¨ur jedes U l¨asst sich die sogenannteLie-Ableitung LU definieren durch
LU(V) := [U, V]. (2)
Zeigen Sie, dass diese Abbildung die Eigenschaften D1 und D2 eines Diffe- rentialoperators (→ VL) erf¨ullt, was die Bezeichnung einer Ableitung recht- fertigt. Ist f¨ur die Definition der Lie-Ableitung ein Zusammenhang n¨otig?
Ubung 3.2:¨ Gegeben sei eine Linearform ω = ωa~ea. Zeigen Sie, dass sich die Differenz der partiellen Ableitungen
Fab := ∂
∂xaωb− ∂
∂xbωa (3)
wie die Komponenten eines (0,2) Tensors transformiert. Dieser wird auch als die ¨außere Ableitung dω bezeichnet.
Ubung 3.3:¨ Autoparallele Kurven sind definiert durch die Gleichung∇UU = 0, bzw.
d2xi
dλ2 + Γijkdxj dλ
dxk
dλ = 0, (4)
wobei λ der Kurvenparameter ist und dxi/dλ = ui die Komponenten des Tangentenvektors entlang der Kurve sind.
1
a) Zeigen Sie, dass ein Parameterwechsel durch µ=f(λ) mit invertierbarem f die Gleichung (4) ¨andert zu
d2xi
dµ2 + Γijkdxj dµ
dxk
dµ =h(µ)dxi
dµ , (5)
mit
h(µ) = −d2µ dλ2
dµ dλ
2
. (6)
b) Ein Parameter wird affiner Parameter genannt wenn die Gleichung der autoparallelen Kurve die einfachere Form (4) annimmt (λ ist also ein affiner Parameter). Zeigen Sie, dass µgenau dann ein affiner Parameter ist wenn er mit λ linear zusammenh¨angt.
Ubung 3.4:¨ a) Betrachten Sie die MannigfaltigkeitR2in kartesischen Koor- dinaten. Gewinnen Sie aus den beiden Gleichungen (4) f¨urx1 =xundx2 =y eine Differentialgleichung f¨ur y(x). Zeigen Sie, dass die L¨osungen dieser Dif- ferentialgleichung durch die Geradengleichung y=mx+b gegeben ist.
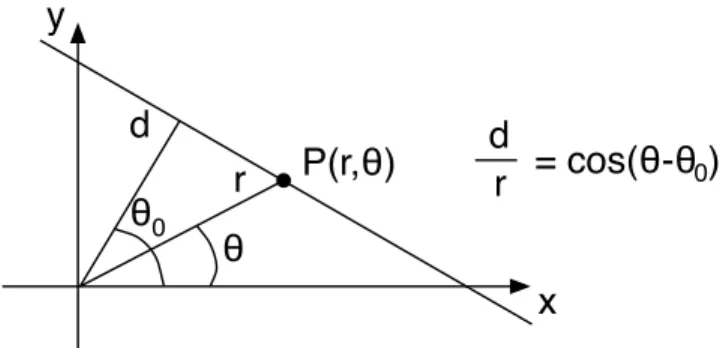
b) Betrachten Sie nun den R2 in Polarkoordinaten. Gewinnen Sie aus den beiden Gleichungen (4) f¨urx1 =r und x2 =θ eine Differentialgleichung f¨ur r(θ). Zeigen Sie, dass die Geradengleichung in Polarkkoordinaten,
r(θ) = d
cos(θ−θ0), d, θ0 = const., (7) (siehe Abb. 1) diese Differentialgleichung l¨ost.
θ0 θr d
P(r,θ)
x y
d
r = cos(θ-θ )0
Abbildung 1: Geradengleichung in Polarkoordinaten
2