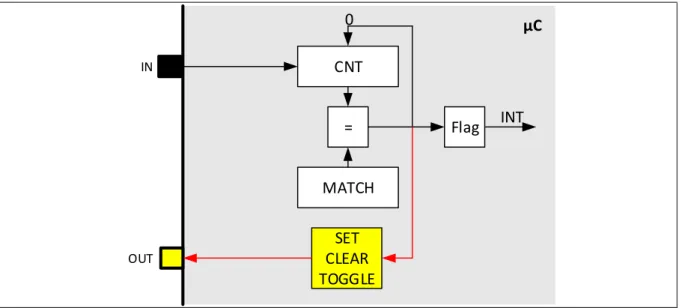
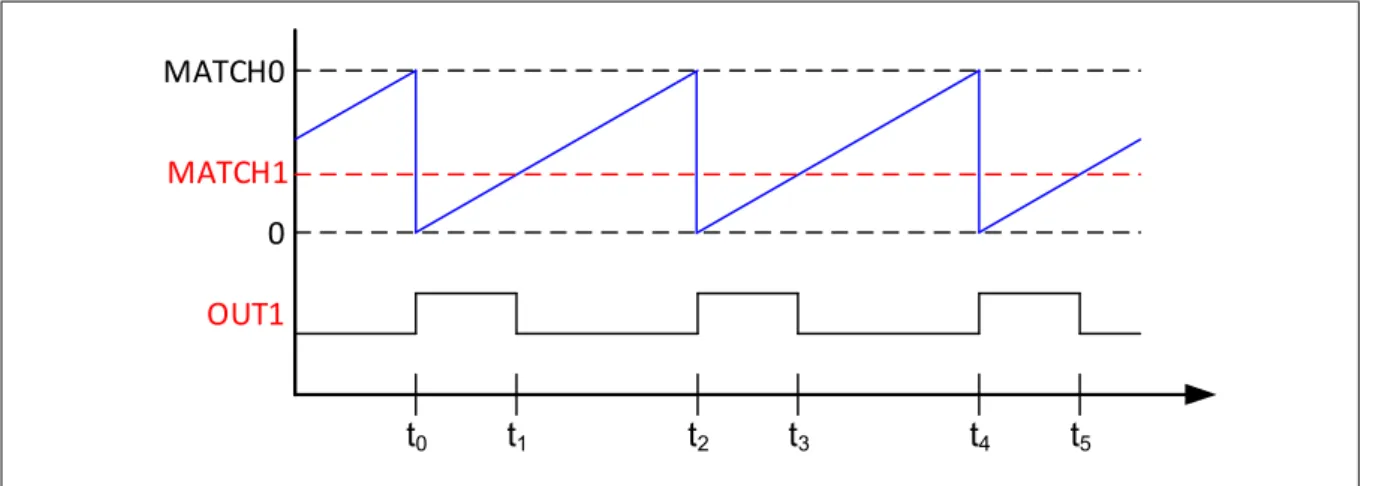
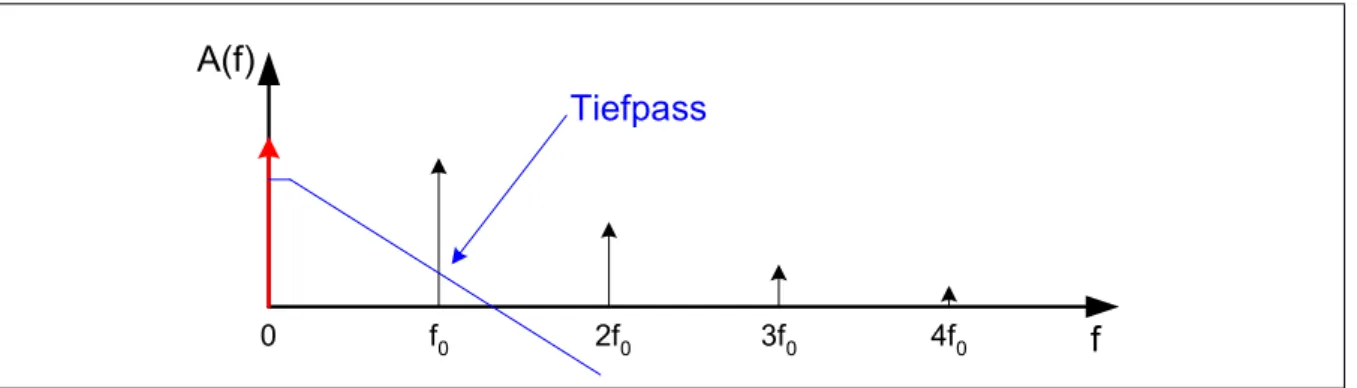
1 Zeitgeber/Zähler ... 1
9
0
0
Volltext
(2)
(3)
(5)
(7)
(8)
(9)
Abbildung
+4
ÄHNLICHE DOKUMENTE
In dieser Aufgabe werden nun die L¨ osungen des harmonischen Oszillators mit Hilfe der Hermite- Polynome diskutiert. (a) Bestimmen Sie die Grundzustandswellenfunktion φ
Es wird eine mir bislang nicht bekannte
Wenn wir im Pascal-Dreieck der Binomialkoeffizienten die Schrägzeilensummen bilden gemäß Abbildung 1 erhalten wir die Fibonacci-Zahlen... Die Schrägzeilen erscheinen jetzt
Die zweite Frage betraf eine Stelle, in welcher Jakob von der.. Etymologie des griechischen Wortes
(4) Es stimmt nicht, daß alle KongreßteUnehmer geraucht haben..
In den folgenden schwingenden Systemen werden Federn gleicher Federkonstante (Richtgröße) D verwendet. a) Bestimmen Sie diese Federkonstante, wenn ein angehängtes Massestück m=53g
Außerdem lernen sie, dass die Eigenschaften von Kunststoffen durch die Wahl der Edukte modifiziert werden können... Beobachtung: Beim Erkalten werden die Reaktionsprodukte
[r]
