Mathematische Grundlagen der Quantenmechanik
Vorlesung WS 1983/84 und WS 1989/90
Peter Wagner
1. September 2017
1 Die Welt der Distributionen 1
1.1 Distributionen . . . . 1
1.1.1 Ubungen . . . . ¨ 3
1.2 Differentiation . . . . 5
1.2.1 Ubungen . . . . ¨ 5
1.3 Produkte . . . . 7
1.3.1 Ubungen . . . . ¨ 9
1.4 Fouriertransformation . . . . 10
1.4.1 Ubungen . . . . ¨ 11
2 Hilbertr¨ aume 13 2.1 Definition . . . . 13
2.1.1 Ubungen . . . . ¨ 14
2.2 Fourierreihen . . . . 15
2.2.1 Ubungen . . . . ¨ 17
2.3 Beschr¨ ankte Operatoren . . . . 18
2.3.1 Ubungen . . . . ¨ 22
2.4 Sobolev-R¨ aume . . . . 24
2.4.1 Ubungen . . . . ¨ 26
3 Unbeschr¨ ankte Operatoren 28 3.1 Ubungen . . . . ¨ 35
4 Der Spektralsatz f¨ ur beschr¨ ankte symmetrische Operatoren 37 4.1 Ubungen . . . . ¨ 51
5 Der Spektralsatz f¨ ur selbstadjungierte Operatoren 54 5.1 Ubungen . . . . ¨ 65
6 Das freie Teilchen in der nichtrelativistischen QM 68
6.1 Ubungen . . . . ¨ 74
INHALTSVERZEICHNIS ii
7 Die Axiomatik der Quantenmechanik 76
7.1 Ubungen . . . . ¨ 86
8 Der harmonische Oszillator 88
8.1 Ubungen . . . . ¨ 98
9 Das Wasserstoffatom (ohne Spin) 102
9.1 Ubungen . . . 116 ¨ 10 Gelfandsche Raumtripel
= Rigged Hilbert space 118
10.1 ¨ Ubungen . . . 138 11 Axiome der relativistischen Quantentheorie 139 11.1 ¨ Ubungen . . . 152 12 Endlich-dimensionale Darstellungen der Lorentzgruppe 153 13 Unit¨ are Darstellungen der Poincar´ e-Gruppe 165
14 Die G˚ arding-Wightman-Axiome 179
15 Das Dirac-Feld 196
16 Die Wightman-Funktionen 205
17 Ausblick 225
Einleitung
B¨ ucher:
H. Triebel H¨ ohere Analysis
J. v. Neumann Mathematische Grundlagen der Quantenmechanik M. Schechter Operator Methods in Quantum Mechanics
A) Die Grundlage der Quantenmechanik bilden gewisse Axiome.
Axiom 1: Die Menge der m¨ oglichen Zust¨ ande entspricht den 1-dimensionalen Unterr¨ aumen eines separablen, komplexen, ∞ - dimensionalen Hilbertraumes H.
Axiom 2: Die Menge der beobachtbaren Gr¨ oßen entspricht den selbstadjun- gierten Operatoren A von H. Der der Energie entsprechende Operator (=
Hamiltonoperator) wird mit H bezeichnet.
Axiom 3: Wenn ein System im Zustand f ∈ H, f = 1 ist und { E
λ: λ ∈ R} die Spektralschar des Operators A ist, so ist die Wahrscheinlichkeit f¨ ur einen Messwert der A entsprechenden Gr¨ oße im Intervall [λ, µ) gleich (E
λ− E
µ)f
2.
Axiom 4: Wenn sich ein abgeschlossenes System zur Zeit t = 0 im Zustand f
0∈ H, f
0= 1 befindet, so befindet es sich zur Zeit t ≥ 0 im Zustand f(t) = e
−itH/~f
0.
B) Das Ziel dieser Vorlesung ist das Verst¨ andnis der Axiome und die Untersu- chung der folgenden grundlegenden Beispiele:
1. Harmonischer Oszillator im R
12. Freies Teilchen im Intervall
3. Coulombfeld im R
3(= H-Atom ohne Spin) 4. H-Atom mit Spin
5. Atom ohne Feinstruktur 6. Diracoperator
Die Vorlesung bringt eine mathematische Darstellung der Grundprinzipien der
Quantenmechanik, nicht aber eine Durchrechnung m¨ oglichst vieler physikalisch
interessanter Systeme. (Daf¨ ur siehe besser: S. Fl¨ ugge : Rechenmethoden der Quan-
tenmechanik.)
Kapitel 1
Die Welt der Distributionen
V.S. Vladimirov Les Distributions en Physique Math´ ematique W. Donoghue Distributions and Fourier Transforms
L. Schwartz Th´ eorie des Distributions
1.1 Distributionen
Definition 1.1
1. D := D ( R
n) := { φ ∈ C
∞( R
n) : supp φ kompakt } (supp φ = { x : φ(x) ̸ = 0 } ).
2. φ
n−→ φ in D : ⇐⇒
(i) ∃ B ⊂ R
nbeschr¨ ankt: ∀ n : supp φ
n⊂ B (ii) ∀ α: ∂
αφ
n−→
n→∞
∂
αφ gleichm¨ aßig.
3. S := { φ ∈ C
∞( R
n) : ∀ α, β : x
α∂
βφ ∈ L
∞} ;
φ
n−→ φ in S : ⇐⇒ ∀ α, β : x
α∂
β(φ
n− φ) → 0 in L
∞.
4. D
′:= D
′( R
n) := { T : D ( R
n) −→ C linear, sodass ∀ Folgen φ
nin D mit φ
n→ 0 gilt T (φ
n) → 0 (in C ) } ; f¨ ur T (φ) schreiben wir < φ, T >.
5. S
′:= { T : S −→ C linear, ∀ φ
n→ 0 in S gilt T (φ
n) → 0 } , S
′, → D
′: T 7−→ (φ ∈ D 7−→ < φ, T >).
6. T
n→ T in D
′(bzw. S
′): ⇐⇒ ∀ φ ∈ D (bzw. S ): < φ, T
n> → < φ, T >. Man schreibt lim
n→∞
T
n= T . 7. T ∈ D
′; supp T := R
n\ ∪
{ U ⊂ R
noffen: < φ, T > = 0 ∀ φ mit
supp φ ⊂ U } . E
′:= { T ∈ D
′: supp T beschr¨ ankt } .
8. T ∈ D
′, f ∈ C
∞= ⇒ f · T ∈ D
′mit < φ, f · T > := < f · φ, T >.
9. Wenn U ⊂ R
noffen ist, definiert man analog D (U ), D
′(U ) etc.
(aber nicht S (U ), S
′(U)!).
Beispiel 1
1. δ: D −→ C : φ 7−→ φ(0) = ⇒ δ ∈ D
′; δ heißt “Dirac’sche Deltafunktion ”.
2. f ∈ L
1loc( R
n) ⇒ f e : D −→ C : φ 7−→ ´
f φ dx; damit erh¨ alt man eine Einbet- tung L
1loc, → D
′: f 7−→ f; statt e f e schreibe ich wieder f .
3.
f
n(x) :=
{ n : 0 ≤ x ≤
n10 : sonst Dann gilt f
n→ δ in D
′.
n fn
1/n
Abbildung 1.1: f
n(x).
Denn:
< φ, f
n>= n
1
ˆ
n0
φ(x) dx −→ φ(0)
nach dem Hauptsatz der Integralrechnung.
1.1 Distributionen 3
1.1.1 Ubungen ¨
1. Es sei R > 0 und δ
R∈ D
′( R
n) definiert durch
< φ, δ
R> :=
˛
|x|=R
φ(x) do
(im R
3zum Beispiel ist do = R
2sin(ϑ) dφ dϑ).
(a) Was ist supp δ
R? (b) Berechne lim
R→0
δ
R, lim
R→∞
δ
R, lim
R→0
R
1−nδ
Rin D
′. 2. Berechne:
(a) lim
ε→0
ε
x
2+ ε
2in D
′oder S
′, (b) lim
t→∞
t
me
ixtin D
′oder S
′. 3. Definiere vp
1x∈ D
′( R
1) durch
< φ, vp 1
x >= lim
ε→0
ˆ
|x|≥ε
φ(x) x dx und zeige:
(a) lim
ε↘0
1
x + iε = vp 1
x − iπδ (Formel von Sochozkij), (b) x vp 1
x = 1.
4. Es sei δ(x − k) : D ( R
1) −→ C : φ 7−→ φ(k). Zeige, dass
∑
∞ k=12
kδ(x − k) in D
′, aber nicht in S
′konvergiert.
5. Es sei A : R
n−→ R
nlinear mit det A ̸ = 0.
(a) Wie muss man T ◦ A f¨ ur T ∈ D
′definieren, so dass sich f¨ ur T ∈ L
1locergibt T ◦ A ∈ L
1locund (T ◦ A) (x) = T (Ax)?
(b) Berechne δ ◦ ( 1 2
3 4 )
im R
2.
6. Wie muss man T (x + x
0) f¨ ur T ∈ D
′( R
n), x
0∈ R
nfest, definieren, damit f¨ ur T ∈ L
1locdas ¨ ubliche herauskommt?
7. Zeige:
T :=
∑
∞ k=−∞e
ikx= 2π
∑
∞ k=−∞δ(x − 2kπ) in D
′( R
1) Hinweise:
(a)
∑
N k=−Ne
ikx= sin(N +
12)x sin(
x2) ,
ˆ
1−1
φ(x) sin(αx)
sin(
x2) dx −→ φ(0) 2π f¨ ur α → ∞ , φ ∈ D ,
(b) (e
ix− 1)T = 0,
(c) T (x + 2π) = T , supp T = { 2kπ : k ∈ Z} . 8. Es sei f
α:= Y (x) · x
α−1Γ(α) f¨ ur α > 0 ; Y (x) =
{ 0 : x < 0 1 : x ≥ 0.
Berechne lim
α→0
f
αin S
′.
9. T ∈ D
′( R
n) heißt homogen vom Grad λ ∈ C , wenn
< φ(x · ε), T >= ε
−n−λ< φ, T >
f¨ ur φ ∈ D , ε > 0.
(a) Was heißt das f¨ ur T ∈ L
1loc?
(b) Von welchem Grad ist δ homogen?
10. Zeige:
ˆ
∞−∞
e
−ixξdx = 2πδ
in D
′( R
1ξ), wenn man
´
∞−∞
als lim
N→∞
´
N−N
interpretiert.
11. Es sei T ∈ E
′. Zeige, dass T als lineares Funktional auf C
∞aufgefasst werden
kann!
1.2 Differentiation 5
1.2 Differentiation
Definition 1.2 Es sei T ∈ D
′bzw. S
′, α ein Multi-index. ∂
αT ∈ D
′bzw. S
′sei durch < φ, ∂
αT > = ( − 1)
|α|< ∂
αφ, T > definiert. Im R
1schreibt man
T
′:=
dxdT wie ¨ ublich.
Beispiel 2 Es sei
Y (x) =
{ 0 : x < 0 1 : x ≥ 0.
Ich berechne Y
′:
< φ, Y
′>
def=< − φ
′, Y >
Y∈L1
=
loc− ˆ
∞0
φ
′(x) dx = − φ(x)
∞|
0
= φ(0) =< φ, δ >, d.h. Y
′= δ.
1.2.1 Ubungen ¨
1. Zeige, dass ∂
αφ, berechnet im Sinn der Distributionen, das ¨ ubliche ergibt, wenn φ ∈ C
m( R
n) und | α | ≤ m.
2. Zeige: φ · δ
′= − φ
′(0) · δ + φ(0) · δ
′f¨ ur φ ∈ C
∞. 3. Berechne T
′, T
′′, T
′′′f¨ ur
(a) T = | x | sin x, (b) T = x
2log | x | .
4. Berechne
dxd[Y (x)e
x] und zeige
| sin x |
′′+ | sin x | = 2
∑
∞ k=−∞δ(x − kπ).
5. Zeige: < φ, d dx vp 1
x > = − lim
ε→0
ˆ
|x|>ε
φ − φ(0) x
2dx.
6. Zeige, dass T
n−→ T in D
′auch ∂
αT
n−→ ∂
αT in D
′impliziert. Ist es f¨ ur gew¨ ohnliche Funktionen ebenso?
7. Berechne ∑
∞k=1
cos kx
k
2folgendermaßen:
(a) Differenziere 2-mal und verwende ¨ Ubung 7 in 1.1.1 und die ¨ Ubung 6.
(b) Suche eine Funktion mit Periode 2π, die dieselbe 2. Ableitung hat.
8. Man bestimme alle Distributionen T ∈ D
′( R
1) mit:
(a) xT = 0, (b) xT
′= 1,
(c) xT
′= 0,
(d) (x + 1)
2T
′′= 0.
9. Zeige
(a) ∂
x1x2[Y (x
1)Y (x
2)] = δ im R
2.
(b) (∂
x21− ∂
x22)[Y (x
1− | x
2| )] = 2δ, verwende ¨ Ubung 5 in 1.1.1.
10. (a) Berechne ∆
3(
1r) im R
3mit der Green’schen Formel.
(b) T sei homogen vom Grad λ ( ¨ Ubung 9 in 1.1.1).
Zeige: ∂
αT ist homogen vom Grad λ − | α | . (c) Berechne ∆
3(
1r) mit folgender Methode:
(i)
1r∈ L
1loc( R
3) ist homogen, (ii) supp (∆
3(
1r)) ⊂ { 0 } ,
(iii) jede Distribution T mit supp T ⊂ { 0 } , hat die Form ∑
endlich
a
α∂
αδ mit a
α∈ C ,
(iv) wende ∆
3(
1r) auf e
−r2∈ S an.
11. Berechne (∂
x+ i∂
y) 1
x + iy .
1.3 Produkte 7
1.3 Produkte
Definition 1.3
1. T
1∈ D
′( R
nx1), T
2∈ D
′( R
ny2); T
1⊗ T
2∈ D
′( R
nx,y1+n2) mit
< φ(x, y), T
1⊗ T
2>:=<< φ(x, y), T
1(x) >, T
2(y) > . 2. Es seien T
1∈ E
′( R
n), T
2∈ D
′( R
n); T
1∗ T
2∈ D
′( R
n) mit
< φ, T
1∗ T
2>:=<< φ(x + y), T
1(x) >, T
2(y) > . T
1∗ T
2heißt Faltungsprodukt von T
1, T
2.
(<< φ(x + y), T
1>, T
2> ist sinnvoll, da < φ(x + y), T
1(x) > kompakten Tr¨ ager in y hat!)
3. Allgemeiner existiert die Faltung von T
1, T
2∈ D
′( R
n), wenn:
∀ φ ∈ D ( R
n) : φ(x + y)T
1⊗ T
2∈ E
′( R
2n). (1.1) Man setzt dann einfach: < φ, T
1∗ T
2> = < |{z} 1
∈ C∞(R2n)
, φ(x + y)T
1⊗ T
2| {z }
∈ E′(R2n)
> .
Beispiel 3 Das Potential φ(t, x) einer elektrischen Ladungsverteilung ϱ(t, x) gen¨ ugt der Gleichung: (System: cgs) (∂
t2− c
2∆
3)φ = 4πc
2ϱ.
E = 1 4πc
2| x | δ
( t − | x |
c )
∈ D
′( R
4t,x) sei durch
< ψ(t, x), E >= 1 4πc
2ˆ
R3x
ψ ( | x |
c , x ) dx
| x | f¨ ur ψ ∈ D ( R
4t,x) definiert. Dann ist E die einzige Distribution mit:
(i) (∂
t2− c
2∆)E = δ (das heißt E ist eine ”Fundamentall¨ osung”), (ii) supp E ⊂ { t ≥ 0 } (das heißt E ist “retardiert”).
φ ist dann durch ϱ so gegeben:
φ = E ∗ 4πc
2ϱ
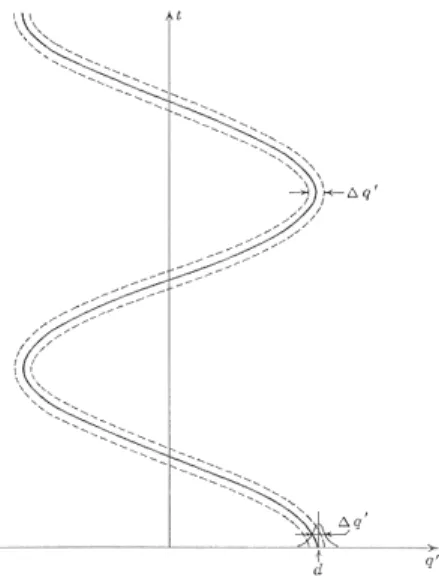
(falls ∗ sinnvoll ist). Es sei nun speziell ϱ durch eine sich auf der Kurve x = u(t) bewegende Ladung e gegeben, das heißt ϱ = e δ(x − u(t)) ∈ D
′( R
4t,x) bzw.
< ψ, ϱ >= e ˆ
∞−∞
ψ(t, u(t)) dt
f¨ ur ψ ∈ D . Das zu ϱ geh¨ orige sogenannte Lienard-Wiechert-Potential φ wollen wir nun berechnen. Nach 3. gen¨ ugt f¨ ur die Existenz der Faltung, dass (1.1) erf¨ ullt ist. Im Falle, dass ∀ t : | u ˙ | > c ist (1.1) immer erf¨ ullt (vgl. Vladimirov, I, § 4).
Leider ist dieser Fall physikalisch nicht relevant. Aber auch wenn α < c existiert, sodass ∀ t : | u ˙ | < α < c, ist (1.1) erf¨ ullt ( ¨ Ubung). Die letzte Bedingung setze ich im folgenden voraus. Es sei also | u ˙ | < c und ψ ∈ D .
< ψ, 4πc
2ϱ ∗ E > = 4πc
2<< ψ(t
1+ t
2, x
1+ x
2), ϱ(t
1, x
1) >, E(t
2, x
2) >
= 4πc
2e <
ˆ
∞−∞
ψ(t
1+ t
2, u(t
1) + x
2) dt
1, E(t
2, x
2) >
= e ˆ
ψ (
t
1+ | x
2|
c , u(t
1) + x
2) dt
1dx
2| x
2| =: A.
Wir machen die Koordinatentransformation t = t
1+
|xc2|, x = x
2+ u(t
1) = ⇒
| x
2| = c(t − t
1)= | x − u(t
1) | .
(Dadurch sind t und x als Funktionen von t
1und x
2gegeben; aber auch umgekehrt sind t
1und x
2eindeutige Funktionen von t und x, denn, wenn t, x und t
1̸ = t
′1gegeben sind, so gilt:
| x − u(t
1) | − c(t − t
1) = | x − u(t
′1) | − c(t − t
′1) = ⇒
= ⇒ c | t
1− t
′1| = | x − u(t
1) | − | x − u(t
′1) | ≤
≤ | u(t
1) − u(t
′1) | ≤
≤ ˆ
t1t′1
| u(τ) ˙ | dτ < c | t
1− t
′1| ,
d.h. t
1ist durch die Gleichung c(t − t
1) = | x − u(t
1) | eindeutig bestimmt, die Koordinatentransformation ist injektiv. ¨ Ahnlich sieht man die Surjektivit¨ at.)
det ∂(t, x)
∂(t
1, x
2) =
det
( 1
cx|x22|
˙
u(t
1) I
) =
1 − u(t ˙
1)
Tx
2c | x
2|
= 1 − u(t ˙
1)
Tx
2c | x
2| . Daher:
A = ec
ˆ ψ(t, x) dt dx
c | x
2| − u(t ˙
1)
Tx
2= ec
ˆ ψ(t, x) dt dx
c | x − u(t
1) | − u(t ˙
1)
T(x − u(t
1))
1.3 Produkte 9
und folglich
φ(t, x) = 4πc
2ϱ ∗ E = ec
c
2(t − t
1) − u(t ˙
1)
T(x − u(t
1)) ,
wobei t
1durch | x − u(t
1) | = c(t − t
1) als Funktion von t und x bestimmt ist.
1.3.1 Ubungen ¨
1. Was bedeutet
(a) T
1⊗ T
2f¨ ur T
i∈ L
1loc? (b) T
1∗ T
2f¨ ur T
i∈ L
1? 2. Bestimme
(a) δ ⊗ · · · ⊗ δ,
(b) ∂
xα(T
1(x) ⊗ T
2(y)), (c) δ ∗ T,
(d) δ
(m)∗ T f¨ ur T ∈ D
′( R
1), (e) f ∗ δ
R, f ∈ L
1loc,
(f) ∂
α(T
1∗ T
2),
(g) δ(x − a) ∗ δ(x − b).
3. Zeige
(a) supp T
1⊗ T
2= supp T
1× supp T
2, (b) supp T
1∗ T
2⊂ supp T
1+ supp T
2.
4. Berechne in D
′+:= { T ∈ D
′( R
1) : supp T ⊂ [0, ∞ ) } (a) Y (x) ∗ Y (x),
(b) Y (x) cos x ∗ Y (x)x
3,
(c) f
α∗ f
β(siehe ¨ Ubung 8 in 1.1.1), (d) zeige
dxdmm(f
m∗ T ) = T f¨ ur T ∈ D
′+.
(Deshalb heißt f
α∗ T Integral der Ordnung α von T . Wie m¨ usste die
Ableitung der Ordnung α definiert werden?)
5. (a) Zeige, dass φ ∗ T ∈ C
∞f¨ ur φ ∈ D , T ∈ D
′und φ ∗ T (x) = < φ(x − y), T (y) > .
(b) Wie kann man φ ∗ T f¨ ur φ ∈ S , T ∈ S
′definieren, sodass es f¨ ur φ ∈ D mit a) ¨ ubereinstimmt.
6. Berechne das Potential einer geladenen Hohlkugel, d.h.
1r∗ δ
Rim R
3. 7. Zeige, dass die Abelsche Integralgleichung
g(x) = 1 Γ(1 − α)
ˆ
x 0f (y) dy
(x − y)
α(0 < α < 1 fest), wobei g ∈ C
1gegeben, f gesucht ist, die einzige L¨ osung
f (x) = 1 Γ(α)
ˆ
x 0g
′(y) dy (x − y)
1−αhat.
1.4 Fouriertransformation
Definition 1.4 1. F¨ ur φ ∈ S sei
b φ(ξ) :=
ˆ
e
−ixξφ(x) dx
2. F¨ ur T ∈ S
′sei T b ∈ S
′durch < φ, T >:=< b φ, T > b definiert.
Dann gilt:
(i) T = (2π)
−nT b ˆ ( − x) (”Fourier-Umkehrformel” ).
(ii) T b ist analytisch f¨ ur T ∈ E
′und T b (z) =< e
−ixz, T > . (iii) S [ ∗ T = S b · T b f¨ ur S ∈ S
′, T ∈ E
′.
(iv) T
n−→ T in S
′= ⇒ T b
n−→ T b in S
′( b ist stetig).
(v) F¨ ur f ∈ L
1⊂ S
′gilt: f b (ξ) = ´
e
−ixξf(x) dx ∈ C
0( R
1ξ).
(vi) F¨ ur f ∈ L
2⊂ S
′gilt: f b ∈ L
2und b f
2
= (2π)
n/2f
2
(”Parseval’sche Formel” ).
1.4 Fouriertransformation 11
Beispiel 4 Wir berechnen b δ
Rim R
3. δ
R∈ E
′mit < φ, δ
R>= ´
|x|=R
φ(x) do, φ ∈ C
∞, do = R
2sin ϑ dφ dϑ in Kugelkoordinaten. Aus (ii) folgt:
δ b
R(ξ) =< e
−ixξ, δ
R>=
ˆ
|x|=R
e
−ixξdo;
offenbar h¨ angt b δ
R(ξ) nur vom Betrag | ξ | ab. Es sei daher oEdA ξ = (0, 0, | ξ | );
x = R(sin ϑ cos φ, sin ϑ sin φ, cos ϑ) in Kugelkoordinaten 0 ≤ ϑ ≤ π, 0 ≤ φ ≤ 2π ⇒
b δ
R(ξ) = R
2ˆ
2π0
ˆ
π 0e
−iRcosϑ|ξ|sin ϑ dϑ dφ
= 2πR
2ˆ
π0
e
−iR|ξ|cosϑsin ϑ dϑ [
u = R | ξ | cos ϑ ]
= 2πR
| ξ |
R|ξ|
ˆ
−R|ξ|
e
−iudu
= 2πiR
| ξ | (e
−iR|ξ|− e
iR|ξ|)
= 4πR
| ξ | sin (R | ξ | ).
1.4.1 Ubungen ¨
1. Zeige, dass f¨ ur T ∈ S ⊂ S
′die Definitionen in 1. und 2. von Def. 1.4 ¨ uber- einstimmen.
2. F¨ ur T ∈ S
′und D := − i∂ beweise:
(a) D [
αT = ξ
αT , b (b) ξ d
αT = ( − D)
αT , b
(c) T \
1⊗ T
2= T b
1⊗ T b
2.
3. Berechne im R
1(a) δ(x − x
0) b f¨ ur x
0∈ R
1, (b) e [
−c|x|, c ≥ 0,
(c) e [
−cx2, c ≥ 0, (d) (e
ix2) b ,
(e) d
11+x2
(mit und ohne Verwendung von b)).
4. Berechne im R
1(a) sign \ x (ben¨ utze die Gleichung (sign x)
′= 2δ), (b) Y [ (x) (betrachte Y (x)e
−εx, ε ↘ 0),
(c) | c x | , (d) sin d x,
(e) cos [ x, (f) vp d
x1.
5. T sei homogen vom Grad λ (dann ist T automatisch in S
′). Zeige, dass T b homogen vom Grad − λ − n ist.
6. Berechne im R
2(a) b
1z
mit z = x
1+ ix
2(verwende ¨ Ubung 11 in 1.2.1), (b) (
1z√
1+r2
)b , r
2= x
21+ x
22(Formel (iii) in der Definition 1.4 gilt auch in diesem Fall),
(c) δ c
R.
7. Berechne r c
−2im R
3mit den folgenden ¨ Uberlegungen:
(a) r
−2ist homogen und radialsymmetrisch, (b) r
−2∈ E
′+ L
2⇒ r c
−2∈ L
1loc,
(c) anwenden auf e
−r2∈ S . 8. (a) Berechne ( ∑
∞n=−∞
δ(x − n)) b . Verwende ¨ Ubung 7 in 1.1.1.
(b) Formuliere das Ergebnis mit Testfunktionen φ ∈ S (“Poissonsche Summationsformel ”).
(c) Wende b) auf φ = e
−x2an!
Kapitel 2
Hilbertr¨ aume
L.A. Ljusternik, W.I. Sobolev Elemente der Funktionalanalysis G. Helmberg Introduction to Spectral Theory in Hilbert Space E. Prugoveˇ cki Quantum Mechanics in Hilbert Space
2.1 Definition
Definition 2.1
1. Ein komplexer Vektorraum H mit einer Abbildung
H × H −→ C : (x
1, x
2) 7−→ (x
1, x
2) heißt Pr¨ a-Hilbertraum, wenn:
(i) (λ
1x
1+ λ
2x
2, x
3) = λ
1(x
1, x
3) + λ
2(x
2, x
3) (ii) (x
1, x
2) = (x
2, x
1)
(iii) x ̸ = 0 = ⇒ (x, x) > 0.
2. Mit x := √
(x, x) ist H ein normierter Raum. { x
n} ⊂ H heißt C-Folge (oder Fundamentalfolge) ⇐⇒ ∀ ε > 0 : ∃ N : ∀ n, m ≥ N : x
n− x
m< ε.
3. H heißt Hilbertraum ⇐⇒ H Pr¨ a-Hilbertraum und H ist vollst¨ andig, d.h.
jede C-Folge konvergiert.
4. H heißt separabel : ⇐⇒ ∃ Folge { x
n} ⊂ H, die dicht ist.
5. { x
n} ⊂ H heißt Orthonormalsystem : ⇐⇒ (x
n, x
m) = δ
n,m=
{ 1 : n = m 0 : n ̸ = m;
{ x
n} heißt ONB : ⇐⇒ { x
n} ist ON-System und in H total, d.h. die Linear-
kombinationen von x
nsind in H dicht.
6. H
1, H
2Hilbertr¨ aume = ⇒ H
1⊕ H
2:= {
(x; y) : x ∈ H
1, y ∈ H
2} ( mit
(x; y), (x
′; y
′) )
= (x, x
′) + (y, y
′) ist wieder ein Hilbertraum.
Beispiel 5
1. H = C
n, (x, y) =
∑
n i=1x
iy
i, wobei x = (x
1, ... , x
n) , y = (y
1, ... , y
n).
2. H = l
2:= {
(x
1, x
2, ...) ∈ C
N: ∑
∞i=1
| x
i|
2< ∞ }
mit (x, y) = ∑
∞i=1
x
iy
i. 3. Ω ⊂ R
noffen, H = L
2(Ω) mit (f, g) =
ˆ
Ω
f(x) g(x) dx.
Bemerkung In Physikb¨ uchern wird von ( , ) statt (i) oft (λ
1x
1+ λ
2x
2, x
3) = λ
1(x
1, x
3) + λ
2(x
2, x
3)
verlangt. Das ( , ) in den Beispielen wird dann etwas anders definiert.
Eigenschaften von Hilbertr¨ aumen
1. (x
1, x
2) ≤ x
1· x
2( “Schwarzsche Ungleichung ” ).
2. { x
n} ⊂ H ONB und x ∈ H = ⇒ x = ∑
∞n=1
x
n(x, x
n) und x
2= ∑
∞n=1
(x, x
n)
2( “Fourierumkehrsatz ” und “Parsevalsche Gleichung”) (oder Satz von Riesz-Fischer ).
3. In jedem separablen Hilbertraum existiert eine ONB (Beweis mit dem “Schmidt- schen Orthogonalisierungsverfahren”).
4. H
1≤ H abgeschlossener Unterraum, H
1⊥:= {
x : ∀ y ∈ H
1: (x, y) = 0 }
= ⇒ H
1⊕ H
1⊥≃ H : (x, y ) 7−→ x + y ( “Projektionssatz ” ).
2.1.1 Ubungen ¨
1. (a) Zeige: l
2ist ein Vektorraum.
(Verwende die Minkowskische Ungleichung.)
(b) Zeige: l
2ist ein Hilbertraum.
2.2 Fourierreihen 15
2. Zeige, dass die Menge der stetigen Funktionen am Intervall [0,1] mit dem Skalarprodukt (f, g) =
ˆ
10
f (t) g(t) dt keinen Hilbertraum bildet.
3. Beweise, dass alle separablen ∞-dimensionalen Hilbertr¨ aume isomorph sind.
(Verwende Eigenschaft 2).)
4. Bestimme eine ONB im Unterraum H
1, der von { 1, t, t
2, t
3, t
4} in H = L
2(
( − 1, 1) )
aufgespannt wird.
5. Zeige: Wenn f
n→ f und g
n→ g in der ∥ · ∥ -Topologie, so ist
n
lim
→∞(f
n, g
n) = (f, g).
2.2 Fourierreihen
Es sei H = L
2( (0, a) )
, a > 0;
{
f
n(t) =
√1ae
2πint/a: n ∈ Z } { und
s
n(t) =
√
2a
sin 2πnt
a : n = 1, 2, ...
} ∪ {
c
n(t) =
√
2a
cos 2πnt
a : n = 1, 2, ...
} ∪ {
c
0=
√1 a}
sind 2 ONB-s (Beweis sp¨ ater).
F¨ ur f ∈ H heißen (f, f
n) komplexe und (f, s
n), (f, c
n) reelle Fourierkoeffizienten.
Nach Eigenschaft 2) konvergiert die Reihe f =
∑
∞ n=−∞f
n(f, f
n)
(bzw. das Analogon mit s
n, c
n) in L
2. Diese Reihen heißen Fourierreihen von f.
Bez¨ uglich punktweiser Konvergenz gilt:
Satz 2.1 f (t) ∈ L
2(
(0, a) )
werde periodisch außerhalb von (0, a) fortgesetzt. Es gelte:
(D) f und f
′sind st¨ uckweise stetig.
Dann konvergiert f¨ ur jedes t ∈ R : ∑
∞n=−∞
(f, f
n)f
n(t) gegen { a) f (t) wenn f in t stetig,
b)
f(t+0)+f(t2 −0)wenn t ein Unstetigkeitspunkt ist.
Bemerkung
1. (D) heißt “Dirichlet-Bedingung ”.
2. Es gibt auch noch andere interessante ONBs in L
2( (0, a) )
, z.B. Walshfunktionen, Legendre-Polynome (vgl. ¨ Ubung 4 in 2.1.1 ) etc.
Beispiel 6
a = 2π, f = t, 0 ≤ t ≤ 2π . F¨ ur n ̸ = 0 gilt:
(f, f
n) = 1
√ 2π ˆ
2π0
t e
−intdt = (vor¨ ubergehend n reell)
= i
√ 2π d dn
[ e
−2πin− 1
− in ]
= 1
√ 2π [ 1
n
2(e
−2πin− 1) + 2πi n e
−2πin]
= (nun n wieder ganz ) =
√ 2π i n ; (f, f
0) = 1
√ 2π ˆ
2π0
t · 1 dt = π · √ 2π .
Als Fourierreihe erhalten wir also:
t =i
∑
∞ n=−∞n̸=0
e
intn + π = π − 2
∑
∞ n=1sin nt
n in L
2(
(0, 2π) )
Man untersuche die Spezialf¨ alle t = 0,
π2, π, 2π !
P arseval : f
2= ˆ
2π0
t
2dt = 8π
33
=
∑
∞ n=−∞(f, f
n)
2= 2π (
π
2+ 2
∑
∞ n=11 n
2) .
Das ergibt :
∑
∞ n=11 n
2= π
26 .
2.2 Fourierreihen 17
2.2.1 Ubungen ¨
1. Es sei a = 10, f (t) =
{ 3 : 0 < t < 5 0 : 5 < t < 10.
(a) Entwickle f in eine Fourierreihe!
(b) Untersuche die Punkte t = 0, 5, 10.
2. (a) Entwickle f(t) = sin t
2 , 0 ≤ t ≤ 2π, in eine Fourierreihe.
(b) Berechne damit ∑
∞n=1
1 (4n
2− 1)
2.
3. (a) Entwickle f(t) = t
2in (0,2π) in eine Fourierreihe!
(b) Untersuche t = 0, π, 2π.
(c) Berechne ∑
∞n=1
1
n
4aus der Parsevalschen Gleichung.
4. Gen¨ ugen folgende Funktionen am Intervall − π ≤ t ≤ π der Dirichletbedin- gung?
(a) f (t) = √
π
2− t
2(b) g (t) = | t |
(c) h(t) = t sin 1 t
5. Vergleiche den Winkel α zwischen
(i) den Vektoren f = (1, 1, 1, 1, 1) und g = (
12
,
32,
52,
72,
92)
im R
5und (ii) den Funktionen f (t) = 1 und g(t) = t in L
2(
(0, 5) ) . Hinweis: In jedem Fall ist cos α =
∥f(f,g)∥·∥g∥.
6. (a) Entwickle f (t) = cos α t, − π ≤ t ≤ π, in eine Fourierreihe (
ONB = {
1√2π
e
int: n ∈ Z })
f¨ ur α / ∈ Z .
(b) Leite daraus die Partialbruchzerlegung von cot ab:
π cot απ − 1
α = 2α ∑
∞n=1
1 α
2− n
2. 7. Es sei T ∈ E
′( R
1), a > 0, T e := ∑
∞n=−∞
T (x + an) (siehe ¨ Ubung 6 im Abschnitt
1.1.1). Zeige:
(a) T e ∈ S
′( R
1).
(b) F T e = F T · 2π a
∑
∞ k=−∞δ
(
x − 2kπ a
)
=
= 2π a
∑
∞ k=−∞F T
( 2kπ a
) δ
(
x − 2kπ a
)
in S
′(verwende ¨ Ubung 7 und 5 im Abschnitt 1.1.1).
(c) F¨ ur f ∈ L
2( (0, a) )
ist ˜ f die periodische Fortsetzung von f und F f ˜ =
√ 2π a
∑
∞ k=−∞(f, f
k)δ (
x − 2kπ a
) in S
′. (d) T e = 1
a
∑
∞ k=−∞F T
( 2kπ a
)
e
2kπix/a= ∑
∞k=−∞
< f
−k, T > f
kin S
′. (Diese Reihe heißt “trigonometrische Reihe ” von T e .)
(e) Entwickle δ
′(x − π) = T in eine trigonometrische Reihe in (0, 2π = a)!
2.3 Beschr¨ ankte Operatoren
Definition 2.2 H, H
1, H
2Hilbertr¨ aume
1. L(H
1, H
2) := { A : H
1−→ H
2linear und stetig } , H
′:= L(H, C ), L(H) := L(H, H ).
2. L(H
1, H
2) ist ein normierter Raum mit ∥ A ∥ :=sup {
∥ Ax ∥ : x ∈ H
1, ∥ x ∥ = 1 } und damit vollst¨ andig, d.h. ein Banachraum, L(H) ist eine Banachalgebra.
3. A ∈ L(H
1, H
2) heißt unit¨ ar : ⇐⇒
(i) A bijektiv
(ii) ∀ x ∈ H
1: Ax = x . 4. Bil(H) := {
h : H × H −→ C mit (i) h stetig,
(ii) h(λ
1x
1+ λ
2x
2, y) = λ
1h(x
1, y) + λ
2h(x
2, y), λ
i∈ C , x
i, y ∈ H, (iii) h(x, λ
1y
1+ λ
2y
2) = λ
1h(x, y
1) + λ
2h(x, y
2), λ
i∈ C , x
i, y ∈ H }
. 5. P ∈ L(H) heißt Projektor : ⇐⇒ ∃ H
1≤ H abgeschlossener Unterraum mit
(i) ∀ x ∈ H
1: P (x) = x,
(ii) ∀ x ∈ H
1⊥: P (x) = 0.
2.3 Beschr¨ ankte Operatoren 19
Satz 2.2
1. H −→ H
′: x 7−→ (
f : y 7−→ (x, y) = (y, x) )
ist bijektiv und normerhaltend (“Satz von Riesz ”).
2. j : L(H) −→ Bil(H) : A 7−→ (
h mit h(x, y) = (Ax, y) ) und k : L(H) −→ Bil(H) : A 7−→ (
h mit h(x, y) = (x, Ay) )
sind ebenfalls bijektiv.
Definition 2.3 A ∈ L(H); A
∗∈ L(H) sei durch (Ax, y) = (x, A
∗y), ∀ x, y ∈ H definiert.
Bemerkung Punkt 2. in Satz 2.2 zeigt Existenz und Eindeutigkeit von A
∗und die Bijekivit¨ at von k
−1◦ j : L(H) −→ L(H) : A 7−→ A
∗.
Beispiel 7 a < b ∈ R , K (x, y) sei eine beschr¨ ankte, messbare Funktion auf [a, b] × [a, b] ⊂ R
2.
Die Volterrasche Integralgleichung 2.Art hat die Form ˆ
xa
K(x, y)f (y) dy − λf(x) = g(x), wobei g gegeben, f gesucht ist, 0 ̸ = λ ∈ C .
Formulierung im Hilbertraum:
H := L
2( (a, b) )
, A sei durch A : H −→ H : f 7−→ g mit
g(x) = ˆ
x aK (x, y)f (y) dy
definiert. Dann ist A ∈ L(H) ( ¨ Ubung 3).
Zu l¨ osen ist also : (A − λI)f = g, wobei I = Einheitsoperator, If = f.
Heuristisch: f = (A − λI )
−1g = − 1 λ
( I − A
λ )
−1; in Analogie zur geometrischen Reihe 1
1 − x = ∑
∞n=0
x
nf¨ ur | x | < 1 setzen wir an f = − 1 λ
∑
∞ n=0λ
−nA
ng, wobei A
ng = A (
A · · · (A
| {z }
n−mal
g) · · · )
. (Diese Reihe heißt Neumannsche Reihe.)
Satz 2.3
K(x, y), H wie oben, λ ̸ = 0. Dann gilt:
(i) Die Reihe B := − 1 λ
∑
∞ n=0λ
−nA
nkonvergiert in L(H), (ii) (A − λI)B = B(A − λI) = I,
(iii) f¨ ur g ∈ L
2(a, b) ist f = Bg die eindeutige L¨ osung der Volterraschen Integral- gleichung in H.
Beweis. (i)
(A
2f )(x) = ˆ
x y=aK (x, y ) Af (y) dy
= ˆ
x y=aK (x, y ) ˆ
y z=aK (y, z) f (z) dz dy = ( Fubini )
= ˆ
x z=af (z) ( ˆ
xy=z
K (x, y) K(y, z) dy
| {z }
K2(x,z)
) dz;
analog erhalten wir:
A
nf (x) = ˆ
x z=af (z) K
n(x, z) dz,
wobei K
1= K, K
n(x, z) = ˆ
x y=zK
n−1(x, y) K(y, z) dy.
2.3 Beschr¨ ankte Operatoren 21
Es sei K(x, y) ≤ c, ∀ x, y = ⇒ (mit Induktion) K
n(x, z) ≤ c
n(n − 1)! | x − z |
n−1= ⇒ A
nf (x)
2≤ c
2n(n − 1)!
2( ˆ
xz=a
f (z) (x − z)
n−1dz )
2≤ (Schwarz)
≤ c
2n(n − 1)!
2ˆ
x a| f (z) |
2dz · ˆ
x a(x − z)
2n−2dz ≤
≤ c
2n(n − 1)!
2f
2(x − a)
2n−12n − 1 = ⇒
= ⇒ A
nf
2= ˆ
ba
A
nf(x)
2dx ≤ c
2n(n − 1)!
2f
2(b − a)
2n2n(2n − 1) ,
| λ
−n| · A
nL(H)
≤
[ c (b − a) ]
n| λ |
nn! .
Da L(H) vollst¨ andig ist, folgt daraus die Konvergenz der Neumannschen Reihe in L(H). (ii) und (iii) ergeben sich leicht aus (i).
Korollar
Mit den obigen Bezeichnungen gilt:
(i) M (x, z) = − ∑
∞n=1
λ
−n−1K
n(x, z) konvergiert f¨ ur alle (x, z) ∈ [a, b]
2und M (x, z) ∈ L
∞(
[a, b]
2) ,
(ii) f¨ ur g ∈ H ist Bg(x) = − 1
λ g(x) + ˆ
x aM (x, z) g(z) dz.
Beweis.
(i) K
n(x, z) ≤ c
n(n − 1)! | x − z |
n−1= ⇒ M(x, z) ≤ c
| λ |
2· e
c|x−z|/|λ|.
(ii) Bg = − 1
λ
∑
∞ n=0λ
−nA
ng
= − 1
λ g + lim
N→∞
inL2([a,b])
ˆ
x a( −
∑
N n=1λ
−n−1K
n(x, z) )
g(z) dz
| {z }
hN(x)
.
Nach dem Satz von Lebesgue ist f¨ ur jedes feste x :
N
lim
→∞h
N(x) = ˆ
xa
M (x, z) g(z) dz.
Da eine in L
2konvergente Folge eine punktweise fast ¨ uberall konvergente Teilfolge hat, gilt (ii).
2.3.1 Ubungen ¨
1. Es sei P ∈ L(H).
(a) Zeige: P Projektor ⇐⇒ P
2= P = P
∗. (b) Ist P = 1
√ 2
( 1 i
− i 1 )
ein Projektor in H = C
2? 2. Man l¨ ose die folgenden Volterraschen Integralgleichungen
g(x) = ˆ
x0