Research Collection
Working Paper
Berechnung polygonaler Platten mit verbesserten Differenzgleichungen
Author(s):
Pfaffinger, Dieter Publication Date:
1970
Permanent Link:
https://doi.org/10.3929/ethz-a-000747218
Rights / License:
In Copyright - Non-Commercial Use Permitted
This page was generated automatically upon download from the ETH Zurich Research Collection. For more information please consult the Terms of use.
ETH Library
/ ?
m
Berechnung polygonaler
Platten mit verbesserten
Differenzgleichungen
Dieter Pfaffinger
Januar 1970 Bericht Nr. 28
Institut für Baustatik ETH Zürich
Leer Vide Empty
Leer
-Vide
-Empty
mit verbesserten Differenzengleichungen
von
Dr. sc. techn. Dieter Pfaffinger
Institut für Baustatik
Eidgenössische Technische Hochschule Zürich
Zürich
Januar 1970
Leer
-Vide
-Empty
Die Lösung der Plattengleichung AAw
=p/D ist für allgemein begrenzte, beliebig gelagerte und belastete Platten in den meisten praktischen Fällen nur numerisch möglich. Bei Be¬
nützung einer elektronischen Rechenmaschine stehen dabei das Differenzenverfahren und neuerdings die Methode der finiten Elemente im Vordergrund.
Die vorliegende Arbeit wurde von Herrn D. Pfaffinger im Rahmen eines Forschungsprojektes des Instituts für Bau¬
statik, Abteilung Massivbau, als Dissertation (Referent Prof. Dr. B. Thürlimann, Korreferent Dr. E. Anderheggen) ausgearbeitet. Es ist ihm eine sehr allgemeine Darstel¬
lung des_.J)ifferenzenverfahrens in Matrizenform gelungen, welches sich besonders für die Programmierung eignet. An Hand von typischen Beispielen zeigt er auch die prakti¬
sche Anwendung des ausgearbeiteten, weitgehend automati¬
sierten Programmes.
Eidgenössische Technische Prof. Dr. Bruno Thürlimann Hochschule
-Zürich
Dezember 1969
Leer
-Vide
-Empty
Seite
1. Einleitung 9
2. Theorie der dünnen Platte konstanter Steifigkeit
2.1 Variationsproblem 11
2.2 Differentialgleichung und Randbedingungen 16
2.3 Problemstellung und Lösungsmethode 22
2.4 Inhomogene Lösungen und Singularitäten 28
3. Basismatrizen des Differenzenverfahrens
3.1 Zweidimensionale Taylorentwicklung 39
3.2 Entwicklungs- und Basismatrix 44
3.3 Spezielle Basismatrizen 53
3.4 Rechenerfahrungen und Anwendungen 58
4. Berechnung polygonaler Platten
4.1 Geometrie 66
4.2 Sterngleichungen 76
4.3 Gleichungssystem und Auflösung 81
4.4 Rechenerfahrungen 87
5. Ergänzungen
5.1 Behandlung von Stützen 104
5.2 Energieansatz zur Berechnung polygonaler
Platten 110
6. Schlussbemerkungen 122
Zusammenfassung 124
Nomenklatur 129
Literatur 132
Leer
-Vide
-Empty
Die Bestimmung der Verformungen und der inneren Kräfte einer dünnen elastischen Platte konstanter Steifigkeit unter ver¬
tikalen Lasten gehört zu dem Kreis von Problemen, deren analytische Lösung nur in einigen Spezialfällen bekannt ist. Man ist daher auf Näherungslösungen angewiesen, welche in vielen Fällen durch Diskretisierung des Systems gewon¬
nen werden können. Dabei wird die in unendlich vielen Punk¬
ten gültige Aussage von Differentialausdrücken für die strenge Lösung ersetzt durch endlich viele Aussagen über die endlich vielen Bestimmungsstücke einer Näherungslösung.
So stellt beispielsweise die Auflösung einer elastischen Platte in einen Trägerrost eine physikalisch anschauliche wenn auch stark vereinfachende Diskretisierung des konti¬
nuierlichen Problems dar.
Bei der Behandlung der Plattenaufgabe besteht eine charak¬
teristische Schwierigkeit in der Tatsache, dass die grund¬
legenden Beziehungen i.a. für die Biegefläche aufgestellt
und gelöst werden, während aber für die Bemessung die Momente und Querkräfte von Interesse sind. Da diese als Linearkombinationen der zweiten und dritten partiellen Ableitungen der Biegefläche gewonnen werden, müssen sich
auch aus einer Näherungslösung für die Biegefläche alle benötigten höheren Ableitungen mit_guter Genauigkeit_.be- rechnen lassen. Die Erfüllung dieser Forderung ist in der Umgebung von Lastangriffspunkten, Stützen oder irgend¬
welchen Singularitäten nur mit grossen Schwierigkeiten möglich. In vielen wichtigen Fällen lassen sich aber ana¬
lytische Ausdrücke angeben, welche die Störungen exakt wiedergeben und nur die Randbedingungen der untersuchten Platte verletzen. Es soll daher die Lösung aufgespalten werden in analytische Anteile zur Erfassung der Störungen
sowie einen numerisch zu berechnenden Korrekturanteil zur
Erfüllung der Randbedingungen.
-
10
-Zur Berechnung dieser nunmehr homogenen Zusatzlösung wird ein Differenzenverfahren verwendet, das durch die Verwen¬
dung von Mehrstellenbedingungen hohen Genauigkeitsanfor¬
derungen genügt. Die Funktion wird dabei in ihre Stützwer¬
te an endlich vielen Punkten diskretisiert. Die allgemeinen
Ansätze zu verbesserten Differenzengleichungen sind vor
allem in [l]* angegeben und wurden von verschiedenen Auto¬
ren (z.B. [2], [3], [4]) ausgebaut. Der hier in Kapitel 3 entwickelte Begriff der Basismatrix ermöglicht eine allge-
meine Diskussion des Differenzenverfahrens und bildet gleichzeitig die Grundlage für die automatische Durchfüh¬
rung aller weiteren Rechenprozesse durch den Computer. Es wird sich zeigen, dass aus der Erörterung der Differenzen¬
ansätze die Grundlagen zu einer Diskussion aller diskreti- sierenden Methoden gewonnen werden können, welche wie etwa in [5] und [6] auf polynomiale Ansatzfunktionen zurück¬
gehen.
Als mathematisches Hilfsmittel wird in dieser Arbeit die Matrizenrechnung verwendet, deren Grundzüge als bekannt vorausgesetzt werden sollen (vgl. [16], [17], [18]). Viele
Ueberlegungen sind von den Besonderheiten der programmier¬
ten Rechnung beeinflusst, die dem Leser generell geläufig
sein sollte. Obwohl alle beschriebenen Rechenabläufe pro¬
grammiert und ausgetestet wurden, werden die eigentlichen Rechenprogranune nicht mitgeteilt, da sie in der gegenwär¬
tigen Form für den kommerziellen Einsatz noch nicht geeig¬
net sein dürften. Schliesslich ist Vertrautheit mit den Prinzipien der Elastizitätstheorie und der Theorie der dünnen Platte für das Verständnis wünschenswert.
*
Siehe Literaturnachweis am Ende der Arbeit.
2. THEORIE DER DUENNEN PLATTE KONSTANTER STEIFIGKEIT
2.1 Variationsproblem
An einem ruhenden, elastischen Körper sind Lasten und Reak¬
tionen im Gleichgewicht. Ebenso bilden die Kräfte an infi¬
nitesimalen Volumenelementen Gleichgewichtssysteme, deren Arbeit bei einer beliebigen virtuellen Verschiebung des Elementes verschwindet. Es verschwindet daher auch die Ge¬
samtarbeit aller Kräfte des Systems.
Betrachtet man nur virtuelle Verschiebungsfelder Su, wel¬
che die geometrischen Lagerbedingungen des Körpers nicht verletzen, so leisten die Reaktionen keine Arbeit. Die Arbeit der Lasten lässt sich also mit einem Potential V durch die Variation SV ausdrücken, während die Arbeit der inneren Kräfte gegen die elastischen Bindungen in den Ele¬
menten der Aenderung der Formänderungsenergie U gleich
ist. Somit wird die Arbeit der elastischen Bindungskräfte
zu
-SU und nach dem Prinzip der virtuellen Verschiebungen ist
SV
-SU
=0 (2.1)
Führt man mit
H
=U
-V (2.2)
die potentielle Energie des Systems ein, so lässt sich die Gl. (2.1) nach Wechseln des Vorzeichens auch in der Form
Sn
=S(U
-V) =0 (2.3)
schreiben. Da n eine Funktion des Verschiebungsfeldes des
-
12
Körpers ist und weiterhin nur stabile Gleichgewichtslagen betrachtet werden sollen folgt, dass unter den wirklichen Verschiebungen die potentielle Energie des elastischen Körpers minimal ist.
In Fig. 2.1 ist eine dünne elastische Platte dargestellt, welche mit p(x, y) im Feld sowie mit Pr(s) und M^(s) am
Rande belastet sei. Die Randmomente sind durch Vektoren mit zweifacher Spitze dargestellt und drehen nach der Rechtsschraubenregel. Die Platte sei an Teilstücken des Randes ->©rart festgehalten, dass sich Gleichgewicht aus¬
bilden kann. Da die Plattendicke h verglichen mit den übrigen Abmessungen klein ist, darf vorausgesetzt werden, dass Punkte auf einer Normalen zur Mittelebene der Platte auch nach der Formänderung auf einer Normalen zur verform¬
ten Mittelfläche liegen. Weiterhin darf bei kleinen Durch¬
biegungen die Verzerrung der Plattenmittelebene vernach¬
lässigt werden, so dass die Verformungen der Platte durch
die vertikalen Durchbiegungen w(x, y) der Mittelebene be¬
stimmt sind.
j/l—'
M U
/
i
i/'£•*••
$ _C_Ä
Fig. 2.1 Fig. 2.2
Unter den gemachten Voraussetzungen lassen sich die Ver¬
zerrungskomponenten des Plattenelementes der Fig. 2.2 durch Ableitungen der Funktion w(x, y) ausdrücken. Mit dem
Hooke1sehen Gesetz sind damit auch die Spannungskomponen¬
ten bestimmt. Für isotrope Platten erhält man durch Integra¬
tion die bekannten Beziehungen für die Momente pro Längen¬
einheit:
h/2
32 32
D (r—r w
+ v-—5- w)
v3xz
3y2
'M
=X
-h/2
•
z
•dz
= -I
M
=y
+
h/2
-h/2
•
z
•dz
= -]
M xy
= -
M yx
+
h/2
"
i v
-
h/2
Die Plattenste:
n :
ifigkeit
E h3
D (Ifw
+vfew) (2-4:)
-
z
•dz
=D (1
-v)
3x3y
12 (1
-.vz) (2.5)
hängt neben der Plattendicke h vom Elastizitätsmodul E und der Querdehnungszahl
vab und wird als konstant vorausge¬
setzt. Schliesslich liefert die Bedingung des Momenten¬
gleichgewichts am Element auch die Querkräfte pro Längen¬
einheit:
Qx
" "D
¦fc Uw) Qy
= -D
•fc (Aw) (2.6)
wobei
»2 »2
*
"TT
+TT
3xz
3yz
14
-Für viele der folgenden Ueberlegungen ist es bequem, die Differentiationszeichen mit
r-
=3 =311
i j xx..xyy..y x yJ
9
=i
+j (2.7)
3x Sy
abzukürzen. Unter Vernachlässigung der Arbeit der Querkräf¬
te wird die Formänderungsenergie des Elementes zu
dU 1
M xv (-3 xx w)
+M (-3 w)
+2 M 3 w
y yy xy xy dxdy
Berücksichtigt man die Beziehungen (2.4) und integriert
über das Gebiet S, so ergibt sich für die Formänderungs¬
energie der Platte der Ausdruck
U
=2 /T{(AW)2
-2C1
"VH3XXW
-3yyW
"(3xyw)2]} dxdy
S (2.8)
Das Potential der Lasten ist entsprechend Fig. 2.1 durch
//'
V
=// p(x, y)
•w
•dxdy
+1 PR(s)
•w
•ds
M_(s)
•3 w
•ds
R
Jn (2.9)
gegeben, wobei n die äussere Normale des Randes symboli¬
siert. Es ist also die potentielle Energie
n
=§ ff JO)2
-2(1
-v)[3xxv»
•3yyw
-Oxyw)*]j dxdy
S
ff p
•wdxdy
-j PR(s)wds
+f MR
(2.10)
(s)
' •3 wds
n
und von allen möglichen Durchbiegungsfunktionen w macht
die wirkliche Funktion n zu einem Minimum. Die zur Konkur¬
renz zugelassenen Biegeflächen müssen dabei am Rande der
Platte den geometrischen Bedingungen genügen. Setzt man
voraus, dass keine Randlasten PR(S) und keine Randmomente M_(s) wirken, so ist ein Randstück
eingespannt, falls w
=0 3nw= 0 (2.11)
aufliegend, falls w
=0 M(s)
=0 (2.12)
frei, falls M(s)= 0 p(s)
=0 (2.13)
M(s) und p(s) stellen dabei die Randmomente bzw. Rand¬
lasten dar, welche durch die Biegefläche w(x, y) bestimmt werden.
Bei Beschränkung auf diese drei Randbedingungen gilt also für w
am eingespannten Rand: w
=0;
am aufliegenden Rand: w
=0
3 w
=0
n (2.14)
(2.15)
Die Gesamtheit der möglichen Durchbiegungen lässt sich
auch erhalten, indem man der wirklichen Biegefläche w(x,y)
eine bis auf Stetigkeits- und Differenzierbarkeitseigen- schaften beliebige Funktion n(x,y) überlagert, welche
ebenfalls den geometrischen Bedingungen (2.14) bzw. (2.15) genügt. Mit einem Parameter
eist daher die Minimalbedin¬
gung (2.3) der Forderung
lim d_
E+0 de n (w
+ e •n)
=0 (2.16)
gleichwertig und das ursprüngliche Variationsproblem ist
damit auf eine Extremalaufgabe zurückgeführt.
-
16
-2.2 Differentialgleichung .und Randbedingungen
Wendet man die Forderung (2.16) auf den Ausdruck (2.10) der potentiellen Energie an, so ergibt sich
D ff Taw
•An
-(1
-v) (3 w
•3 n
+3 w
•3 n
j L
v ¦"*•xx yy yy xx
2
'3xyw3xyn^ dxdy
"ffP
'ndxdy
-a\ PR(s)nds
MR(s)
•3nn
•ds
=0 (2.17)
Dabei bedeuten w(x,y) die wirkliche Durchbiegungsfunktion
und n(x,y) eine stetige und stetig differenzierbare, sonst aber beliebige Zusatzfunktion, welche ebenfalls den geome¬
trischen Randbedingungen genügt. Es soll vorausgesetzt werden, dass alle benötigten Ableitungen von w und n exi¬
stieren. Weiterhin soll das Gebiet S (Fig. 2.3) als ein¬
fach zusammenhängend und von einer differenzierbaren Rand¬
kurve R(s) begrenzt angenommen werden.
Bezieht man den Punkt A einmal auf das System x, y und zum anderen auf das gedrehte System n, t, so ist mit der Transformations¬
matrix
[T]
--sma cosa
(2.18)
Fig. 2.3
auch der Zusammenhang zwischen den Koordinaten gegeben:
=
[T] (2.19)
Es lässt sich sofort nachweisen, dass die transponierte Matrix [T] T die Eigenschaft
[T]X[T]
=[I] (2.20)
besitzt, wobei [i] die Einheitsmatrix bezeichnet. Somit ist
[T] orthonormal, d.h. ihre inverse Matrix [T] ist gleich der transponierten Matrix [T] T :
[T]"1
=[T]' (2.21)
Aus der Gleichung (2.19) lässt sich mit Hilfe der Ketten¬
regel sofort die Beziehung
t J
[T] (2.22)
für die ersten Ableitungen gewinnen und daraus erhält man auch die Transformationen
3 3
.nn nt
3nt 3tt
[T]
3 3
xx xy
3 3
xy yy
[T]J
für die zweiten Ableitungen. Die inversen Relationen wer¬
den durch Vor- bzw. Nachmultiplikation mit der Kehrmatrix (2.21) gewonnen. Durch weiteres Differenzieren unter An¬
wendung der Kettenregel lassen sich auch die Transforma¬
tionsgleichungen der höheren Ableitungen ermitteln. Formal
-
18
ergibt sich
3
iii,J
x> =(cosa
•3
j- +sina
•)J1
•(-sina
•3
+cosa
•3 )J
y
ay
(2.23)
mit
«p
=i
+j
Entwickelt man die beiden Faktoren rechts mit der Binomial- formel wobei die Potenzen von x und y in den Differentia¬
tionszeichen wie normale Potenzen behandelt werden dürfen,
so wird nach der Ausmultiplikation 3 i. j zu einer Linear-
n t
kombination aller Ableitungen nach x und y der Ordnung <f>.
Ein analoges Ergebnis gilt für die inversen Beziehungen.
Mit Hilfe der Green'sehen Formel
(u
•av
-v
•Au)dxdy
=i (u
•3 v
-v3 u)ds
S R
wobei
u
=Aw v
=n
zu setzen sind, sowie durch Anwendung des Gauss'sehen Satzes
II (3xu
+3yv)dxdy
=i (u dx
-v
•dy)
und Transformation auf das System n, t lässt sich (vgl.
[7], [8]) die folgende grundlegende Umformung ableiten:
(1
-v) (3 W-3 n+9 W
•3 ti
v •"v
xx yy yy xx
ff Faw
•Ar, S
-
23xyw
•3xyn)l dxdy
=ff n
•AAwdxdy
+f{"[-\ (AW)
-(1 -v)fI(3ntw) 3 n n(-3 nn w
V 3ttw)} ds (2.24)
Besteht der Rand R nur aus geradlinigen Teilstücken, so ist
h^nt^
=3nttW
und Gl. (2.17) kann damit und mit (2.24) in der Form
ff ri(D
•aäw
-p)dxdy
+L n
•S R
fcw
-PR(s)j
ds+
/
(-3nn)•[-
DD
•3 w
-D
•(2
-v)
nnn
*¦ '3nttw
"Vs>
ds+
*
C"V>*
"
D
'
3nnw
"uD
'3ttw
MR(s)] ds
=0 (2.25)
geschrieben werden. Da n im Gebiete S beliebig angenommen werden darf, folgt aus dem ersten Integral die Differen¬
tialgleichung
AAw
-ß
=
0 (2.26)
der dünnen elastischen Platte konstanter Steifigkeit. Für das Verschwinden der beiden Randintegrale genügt es, wenn in den Produkten jeweils ein Faktor verschwindet. Beach¬
tet man, dass n die geometrischen Randbedingungen (2.14)
-
20
und (2.15) ebenfalls erfüllt, so erhält man sämtliche Rand¬
bedingungen für w:
a) eingespannter Rand:
w
=0; 3 n w
=0 (2.27)
b) aifliegender Rand:
w
=0;
c) freier Rand:
D(3nnW
+V3ttw)
=MR(S>
(2.28)
D(3nnw
+v,ttw) =MR(s); 3 nnn w
+(2
v -v)3
'ntt
+twPR(s) (2.29)
Durch Nullsetzen von PR(s) und MR(s) erhält man daraus die Bedingungen (2.11), (2.12) und (2.13).
Die gesuchte Durchbiegungsfunktion w(x,y) hat also neben
der Differentialgleichung (2.26) und den geometrischen Randbedingungen noch zusätzliche statische Randbedingungen
zu erfüllen. Durch Transformation der Momente (2.4) und Querkräfte (2.6) auf das System n, t erkennt man, dass
-
D(3
vw
+vj w)
=M
nn tt
'n
d.h. einem Randmoment M(s) entspricht, während
D 3 w
+(2-v )3
.+w[ nnn
v 'ntt xn t nt
eine Randbelastung p(s) darstellt, welche durch die Scher¬
kräfte und die in Kräfte aufgelösten Randdrillungsmomente
gebildet wird.
Macht man für w nun den Ansatz
w(x,y)
=WQ(x,y)
+wh(x,y) (2.30)
so folgt zunächst aus (2.26) die Gleichung
AAw
+AAwh
-^
=0 (2.31)
Da der inhomogene Lösungsanteil w die Belastung wiederge¬
ben soll, muss
AAwQ
-£
=0 (2.32)
sein, während der homogene, lastfreie Anteil w, der Glei¬
chung
AAw,
=0 (2.33)
genügen
muss.Ebenso lassen sich auch die Randgleichungen aufspalten. Führt man mit
Mo<s>
" "DC3nnwo
+v3ttV> <2-34)
die Randmomente und mit
p„(s)
= -dH> w
+(2
-v)9 .twl (2.35)
o L nnn o ntt ol
die Randlasten des inhomogenen Zustandes ein, so erhält man:
a) eingespannter Rand:
w,
+w^
=0; 3 w,
+3 w
=0 (2.36)
honhno
-
22
b) aufliegender Rand:
wh
?WQ
=0;
-D(3nnwh
?v3ttwh)
?Mo(s)
=0
(2.37)
c) freier Rand:
D<3nnwh
+v3ttV
+Vs>
"°>
-
D
¦J
3 w,
+(2
-v)3
„_w, +p (s)
=0 (2.38)
nnn h
l ¦*ntt h *o
*¦ ' v '2.3 Problemstellung und Lösungsmethode
Bei der Herleitung der Randgleichungen wurde in Abschnitt 2.2 eine aus geradlinigen Teilstücken bestehende Randkurve vorausgesetzt. Darüber hinaus sollen folgende weitere Ein¬
schränkungen getroffen werden:
a) Das Gebiet S sei konvex. Die Platte hat damit die Form eines Polygons, bei dem das Plattengebiet S stets ganz auf einer Seite jedes Randstückes liegt.
b) Entlang einer Polygonseite sei die Randbedingung kon¬
stant. Dabei sollen nur die Bedingungen (2.11), (2.12) oder (2.13) möglich sein.
c) Das Gebiet S sei einfach zusammenhängend. Dadurch wer¬
den Aussparungen in der Platte ausgeschlossen.
d) Im Gebiet S seien keine geometrischen Bedingungen zu erfüllen. Damit werden Stützen im Plattengebiet aus¬
geschlossen.
Durch die gemachten Voraussetzungen wird die automati¬
sche Behandlung durch den Computer wesentlich vereinfacht.
Es soll aber ausdrücklich betont werden, dass die hier dar¬
gestellte Berechnungsmethode grundsätzlich von diesen Ein¬
schränkungen unabhängig ist und mit entsprechenden Rechen¬
programmen auch zur Lösung viel allgemeinerer Randwertauf¬
gaben verwendet werden kann.
In Fig. 2.4 ist eine polygonale Platte dargestellt, welche obigen Forderungen genügt. Die Platte ist auf ein recht¬
winkliges Achsenkreuz x, y bezogen und mit l Lasten
Pifx.y) 1,.
belastet. Neben dem globalen x, y-System sei für jede Poly¬
gonseite ein lokales System n, t im Anfangseckpunkt einge¬
führt. Gesucht sind die Biegeflächen w.(x,y) der Platte
unter den i Belastungen sowie die Einflussflächen von be¬
stimmten partiellen Ableitungen der Biegefläche für de.i Einflusspunkt A. Aus dem Maxwell'sehen Satz über die Gegen¬
seitigkeit der Verschiebungen folgt, dass die Biegefläche
der Platte unter der Einzellast P
=1 in A der Einflussfläche oder Green'sehen Funktion für die
Durchbiegungen im Einflusspunkt A gleich ist. Durch Differentiation nach dem Einflusspunkt erhält man aus die¬
ser Biegefläche auch die Einflussflächen der zweiten und drit¬
ten Ableitungen und durch Linearkombination nach (2.4) und (2.6) auch die Einflussflächen der Momente und Querkräfte.
Fig. 2.4
24
Demnach erfüllen alle Green'sehen Funktionen der dünnen elastischen Platte die Gleichung
AAw
=0
im Gebiet S mit Ausnahme des Einflusspunktes A, sowie die Randgleichungen am Rande R. Da bereits unter der Einzel¬
last P
=1 in A bestimmte Spannungskomponenten unendlich
gross werden, der Punkt A somit ein singulärer Punkt ist, weist auch der Einflusspunkt A der Einflussflächen für die Ableitungen eine Singularität auf. Diese Singularitä¬
ten sind bekannt und damit lassen sich die Einflussflä¬
chen aich als Biegeflächen der mit den entsprechenden Sin¬
gularitäten im Einflusspunkt belasteten Platte auffassen.
Bei den Lastfällen 'Einflussflächen' stellen die Biege¬
flächen bereits das gesuchte Ergebnis dar, während bei den übrigen Lastfällen aus den Biegeflächen noch die Mo¬
mente und Querkräfte berechnet werden müssen.
Für verschiedene Lastformen p.(x,y) sowie für die Singu¬
laritäten der Einflussflächen lassen sich Gebiete S 0,1
(Fig. 2.4) mit dem Rand R 0,1
.und der analytisch gegebe-
nen Biegefläche w
.angeben, für welche in einem zuge- 0,1
ordneten Koordinatensystem £., n• die inhomogene Glei¬
chung
AAw .(£., n-) 0,lv l' l'
Viti*, 1\AJ
erfüllt ist. Es soll ausdrücklich darauf hingewiesen wer¬
den, dass 5 und n hier dimensionsbehaftet sind. Das Gebiet S
.hängt von der Art der Belastung p. ab und sein Bezugs¬
system £., n- soll um den Winkel 9. gegenüber dem x, y-Sy¬
stem gedreht sein. Auch für S
.werden die Einschränkungen
0,1
c) und d) gemacht und weiterhin wird verlangt, dass die Polygonplatte ganz vom Rand R
.umschlossen wird.
0,1
Ersetzt man in der Definitionsgleichung (2.18) für die Transformationsmatrix [T] den Winkel
adurch 9., so folgt mit dem Ortsvektor
{ci>
LyCi
durch sinngemässe Anwendung von Gl. (2.19) die Transforma¬
tion
[T] (2.39)
zwischen den Koordinatensystemen. Für den Randwinkel *
einer
Figur
einer
Polygonseite im System g., n- liest man aus der
(2.40)
ab und analog transformieren sich Winkelgrössen, welche beispielsweise zur Beschreibung der Last p. benötigt wer¬
den. Diese beiden Beziehungen gestatten die Beschreibung
der mit p. belasteten polygonalen Platte im System £., n••
Denkt man sich nun die Platte entlang ihres Randes R aus dem Gebiete S
.herausgeschnitten, so sind Deformationen
0,1
und innere Kräfte durch die Funktion w .(£., n•) bestimmt.
o,x 1 1
Insbesondere lassen sich auf R die Durchbiegungen, Normal¬
ableitungen, Randmomente (2.34) und Randlasten (2.35) aus
w
•bestimmen, welche i.a. nicht mit den durch die Rand- 0,1
bedingungen der Platte vorgeschriebenen Werten übereinstim¬
men. Ueberlagert man aber dem Zustand w
.einen Eigen-
0,1
spannungszustand der Platte, welcher diese Randwerte auf ihre vorgeschriebenen Werte korrigiert, so hat man damit den wirklichen Zustand der Platte gefunden. Die Superposi-
tion beider Zustände entspricht genau dem Ansatz (2.30)
26
-und da w
.voraussetzungsgemäss die Gleichung (2.32) er-
0,1
füllt und bekannt ist, muss nur noch der Eigenspannungszu- stand ermittelt werden. Dieser ergibt sich als Lösung der homogenen Gleichung (2.33) mit den Randbedingungen (2.36), (2.37) oder (2.38) wobei die Randgrössen
w
,3 w
,M (s), p (s) o
no'ov
J*ov
¦*aus w
.zu berechnen sind. Die Biegefläche w, des Eigen-
o,i
6h
sspannungszustandes hängt somit nur mehr von den Randwerten ab und ist im Gebiet S frei von belastungsabhängigen Stö¬
rungen. Ihre numerische Berechnung wird umso einfacher, je weniger die Randwerte des inhomogenen Zustandes von den für das gegebene Plattenproblem vorgeschriebenen Werten ab¬
weichen. Sind die Lasten weit vom Rand entfernt, so hat man wenig oszillierende inhomogene Randwerte. Das hier verwen¬
dete Differenzenverfahren zur Lösung des homogenen Problems
erlaubt aber auch die Erfassung stark oszillierender Rand¬
funktionen mit einer gleichmässig hohen Genauigkeit. Spal¬
tet man auch die Schnittkräfte (2.4) und (2.6) gemäss (2.30) in einen inhomogenen und einen homogenen Anteil auf,
so zeigt sich der besondere Vorteil dieses Ansatzes: der inhomogene Teil wird aus w
.exakt berechnet und bestimmt
0,1
wesentlich die komplizierten Verhältnisse in Lastnähe, während der homogene Anteil durch numerische Differentia¬
tion der störungsfreien Fläche w, ebenfalls mit hoher Ge¬
nauigkeit gewonnen werden kann.
Jede Lösung der Plattendifferentialgleichung (2.26) für eine bestimmte Belastung p. in einem Gebiet S
.der oben
1 0,1
definierten Beschaffenheit lässt sich als inhomogener Zu¬
stand der mit der gleichen Last p. belasteten polygonalen Platte auffassen. Dabei ist es bedeutungslos, welche Bedin¬
gungen von der Lösung w
.am Rande R
.erfüllt werden.
Man erhält daher aus der Literatur einen ganzen Katalog
analytisch darstellbarer inhomogener Lösungen für viele praktisch wichtige Belastungen. Für die Abspaltbarkeit des Lastanteils soll dabei vorausgesetzt werden, dass die Last- grösse von Anfang an gegeben ist. Ist die Platte beispiels¬
weise auf Stützen aufgelagert so sind die Stützendrücke aus Verträglichkeitsbedingungen zu bestimmen und somit zu¬
nächst unbekannt. Diese Einschränkung ist aber ebenfalls nicht grundsätzlicher Natur.
INHOMOGENE LOSUNGEN UND SINGULARITÄTEN
LASTFALL GEBIET S0 ART DER LOSUNG LITERATUR
Gleichest p aufliegender Plattenstreifen geschlossener Ausdruck [9],S 180
"
aufliegende Rechteckplatte einfache Reihen [9],S 200
"
aufliegende Kreisplatte geschlossener Ausdruck [9],S 240
"
eingespannte Kreisplatte geschlossener Ausdruck [9],S 24 1
Hydrostatische Last aufliegender Plattenstreifen geschlossener Ausdruck [9],S 1 8 1
'•
aufliegende Rechteckplatte einfache Reihen [10],S 124
Dreieck
-Streitenlast aufliegender Plattenstreifen einfache Reihen [11],S 5 5 Beliebige Streifenlast aufliegender Plattenstreifen einfache Reihen [9],S 18 1
Rechtecklast p aufliegender Plattenstreifen einfache Reihen [9],S 184
"
aufliegende Rechteckplatte einfache Reihen [9],S 199
Linienlast p aufliegender Plattenstreifen einfache Reihen [9],S 185 Beliebige Linienlast aufliegender Plattenstreifen einfache Reihen [11], S 5 8
Kreislast p aufliegende Kreisplatte geschlossener Ausdruck [9],S 24 2 Kreisringlast p aufliegende Kreisplatte geschlossener Ausdruck [9],S 24 5
Einzellast P aufliegender Plattenstreifen einfache Reihen [9],S 186
»
aufliegende Rechteckplatte einfache Reihen [9],S 200
"
aufliegende Kreisplatte geschlossener Ausdruck [9],S 244
»
Kreis
umEinflusspunkt geschlossener Ausdruck [9],S 260
Einzelmoment M aufliegender Plattenstreifen einfache Reihen [9],S 187
"
Kreis
umEinflusspunkt geschlossener Ausdruck [10],S 32 6
Singularitäten für
dxxw ifn Feld Kreis
umEinflusspunkt geschlossener Ausdruck [9],S 262 dXyW
imFeld Kreis
umEinflusspunkt geschlossener Ausdruck [9],S 262
<3x(Aw)
imFeld Kreis
umEinflusspunkt geschlossener Ausdruck [9],S 262
M über Querbalken durchlaufende Platte einfache Reihen [13], S 121 dxxw am eingesp Rand Kragplatte geschlossener Ausdruck [14], S 85
<3„(Aw)am eingesp Rand Kragplatte geschlossener Ausdruck [14], S 85
Tabelle 2.1
-
28
In Tabelle 2.1 wurde eine Auswahl inhomogener Lösungen und Singularitäten zusammengestellt. Bestehen für eine bestimm¬
te Lastform mehrere Möglichkeiten, so wählt man diejenige
aus, für welche die inhomogenen Randwerte der aus S her¬
ausgeschnittenen Polygonplatte am besten mit den wirkli¬
chen Randbedingungen übereinstimmen. In diesem Falle sind mit der homogenen Lösung nur kleine Korrekturen zu berech¬
nen, wodurch die Genauigkeit der superponierten Gesamtlö¬
sung günstig beeinflusst wird.
2.4 Inhomogene Lösungen und Singularitäten
Von den zahlreichen bekannten inhomogenen Lösungen der Plattengleichung sollen in diesem Abschnitt einige wich¬
tige Funktionen genauer diskutiert werden. Bei den hier nicht behandelten inhomogenen Lösungen geht man analog vor.
Es wird sich bei der Berechnung des homogenen Lösungsan¬
teils zeigen, dass durch die verwendeten Gitterpunkte ein Rechteck der Seitenlängen l x
,l (Fig. 2.5) bestimmt ist.
y
Dieses Rechteck um- schliesst die poly¬
gonale Platte und bietet sich als na¬
türliche Begrenzung des Problems an.
Das Bezugssystem x, y der Platte soll daher in der nord¬
westlichen Ecke an¬
genommen und die Er¬
mittlung der Gebiete S auf dieses um-
o
schriebene Rechteck
Fig. 2.5
abgestimmt werden.
Neben den Funktionswerten der inhomogenen Lösungen und Singularitäten sind auch die partiellen Ableitungen bis einschliesslich dritter Ordnung zur Berechnung der Schnittkräfte von Bedeutung. Es genügt, alle Ausdrücke für das System £, n anzugeben und sie dann gegebenenfalls mit den Beziehungen (2.23), (2.39) und (2.40) zu trans¬
formieren.
a) Gleichlast p
Als Gebiet S wird der unendlich lange, beidseitig drehbar aufgelegte Plattenstreifen (Fig. 2.6) gewählt.
Das System £, n der inhomogenen Lösung soll mit dem System x, y der polygonalen Platte zusammenfallen. Die zylindrische Biegefläche hängt nur von f, ab und wird mit
a
=lx
w0CO
=24D (5"
"2a?3
+a3c) (2'41)
Da
{c}
={0} und 9
=0
ist, vereinfachen sich die Transformationen (2.39) und (2.40) zu
C=x; n=y; &
= aDie partiellen Ableitungen von (2.41) sind in Tabelle 2.2
zusammengestellt.
30
w0-10 per
Fig. 2.6
b) Rechtecklast p Die Belastung sei durch den Ortsvek¬
tor
r i
{m} (2.42)
des Lastmittelpunk¬
tes (Fig. 2.7), den Winkel <P
,die hal¬
ben Seitenlängen c und d sowie den Druck p gegeben.
Der Winkel 9 lässt sich stets mit
o ± f ± 2
angeben. Auch hier wird als Gebiet S
o der unendlich lange, beidseitig drehbar aufliegende Plat¬
tenstreifen gewählt, der nun aber um den Winkel 9 gegenüber der positiven
x-Achse gedreht ist. Seine Ränder sollen durch die Punkte (0, 0) und (sl x
,l ) laufen und der Nullpunkt 0 des £, n-
y
Systems wird durch die Bedingung festgelegt, dass der Lastmittelpunkt auf der £-Achse liegen soll. Aus der Fig.
2.7 liest man für die Plattenbreite
a
=l .cosip+ j -sin ?
x y (2.43)
ab und weiterhin gelten die Beziehungen
Fig. 2.7
u
=m
•cos9>
+m
¦sin 9
x y (2.44)
|{c}|
= -m x
•sin 9
+m
•cos
•y (2.45)
Der Ortsvektor (c> hat damit die Komponenten
{c}
|{c}| sin<P
|{c}| cos 9
(2.46)
und da
.<
= a -9
32
wo-10-^
Fig. 2.8
ebenfalls bekannt ist, können alle Bestimmungsstücke der polygonalen Platte im System C, n dargestellt werden.
Mit der Abkürzung
nir
a (2.47)
lässt sich die Biegefläche des Plattenstreifens unter der Rechtecklast durch die folgenden einfachen Reihen darstel¬
len:
n
<d:
w (5, n)
=„
J ~5"
•--n(ü) c)
•sin(ci) u)
•sin(<- £)
o
' ' aD _u^
n ' *• n ' *•
n
yn n
=
-fc
_i,
_, .
|
nn
(2.48.1)
•J2
+Ln
•Sh(unn)
-(2
+mnd)Ch((1)nd)|e"ulndl
n
=1,2,...
n
>d:
w0(5, n)
=-^
-^
•sin(ü)nc)
•sin(unu)
•sin(<-nO
n n
(2.48.2)
|"(2
+ _.ri) Sh(u d)
- ud Ch(_. d) 1 e"unn
L n
'n n vnJ
n
=1,2,...
Für n
=d stimmen die beiden Funktionen überein. Es ist zu
beachten, dass (2,48.1) und (2.48.2) nur für
r\->_ 0
definiert sind und daher mit | ri | gerechnet werden muss. Bei allen ungeraden Ableitungen nach n (Tab. 2.2) ist aus die¬
sem Grunde für n
<0 das Vorzeichen zu ändern. Der Summen¬
index n wird für die praktische Rechnung durch eine gewähl¬
te obere Schranke N begrenzt. Diese Schranke bestimmt die numerische Genauigkeit der inhomogenen Lösung und wird für die Auswertung durch den Computer etwa mit
N
>50
angenommen. Damit ist auch für kleine Belastungsflächen eine praktisch ausreichende Genauigkeit gesichert. In Fig. 2.8 ist die Biegefläche des Plattenstreifens unter einer Rechtecklast in der Mittellinie mit den Abmessungen
_
a_
,a
10' a 20
dargestellt.
INHOMOGENE FUNKTIONEN FÜR GLEICHLAST UND RECHTECKLAST H
erLASTFALL
GleichlostpRechtecklast
pi)
<dRechtecklostprj
>dFAKTOR
P 2D2P aD
2
P aD "„{(.¦n)
=
1^(f'
-
2-f
+a"f ) £—l sin(wnc) sm(<jnu) sin(wn£) {-
+[<-„
i)Sh(_.„-)-(_+_¦„d) Ch(u)„^)]e","nd}
Z—; sin(cunc) sin(a>nu) sin(<u.£)
nwn[(2
+ai„_) Sh(wnd)-üi„d Ch(_.nd)]e~I"n'> -ä-w
=df
°±{4t>-6ae'
+o>) 0
Zrr. sinlwnc) sin(wnu) cos(wn£)
n"to{2*[«ni] Sh(üjn^)-(2*ü)„d) Ch(a)n^)]e""n<i} Zrr-; sin(wnc) sin(wnu) sm(uin£)
nwn[a„v Ch((jn7,)-(1*ai„d) Sh(iun-)]e"a'"d
Z.-7-J sin(u»nc) sin(ü;nu) cos(a>n£)
nwn[(2-<-„-> ShU-ndl-a^d Ch(la„d)]e-'un') Z—; sintwnc) sin(b>nu) sm(uJn£)
n—'n[u„d Ch(a)nd)-(1*(un7)) Sh(wnd)]e""'n,' af!"° af
a-w° _?iw
=f-o f
0 0-Zrr» sm(_inc) sin(ojnu) sin(a>n£)
n"ti{2*[a>„- Sh(cDn7j)-(2*<u„d) Ch(wn7,)]e-<Jnd } Z.-fi sin(_inc) sm(iunu) cos(<un{)
nwn[a„v Ch(u>„7!)-(1*w„d) SMüi„-)]e'"a,nd r^4 smtwnc) smlainu) sm(cunf) [cun7j Shlwn-)-ii;nd Ch(aJ„^)]e"Wnd
-Z,~rs sin{wnc) sin(wnu} sin(cjnf)
nn[{2-i-wn-J Sh(cu„d)-<D„d Ch(_v1d)]e-"'i'''' Z77-; sin(<unc) sin(unu) cos(unf) [üj„d Ch&Jndl-d-UnT,) Sh(Wrd)]e-ü'"7' Zrr»
sm(«und sin(wnu) sin(u„{)
n"ti[io„
i,Shlo^dl-aind Ch(w„d)]e"u,n'' afäW° afdi,'
'
a-jW°
2f-0
0 00
"Z^-! sin(cii„c) sm(u)nu) cos(un{) {2
+[cun- Sh(ur,^)-(2+aind) Ch(_in-)]e~<und} -Zm sin(ü)nc) sin(_.„u) sin(uinf)
nn[ajn
-Ch(<K„_)- (1*_.nd) Sh(ü)„,)]e"und Z77-? sin(ui.c) sinlai.u) coslw.f)
nun[(jn7,Sh(i.n,)-üjnd Ch{ai„r,)]e'u''i') Z^p sin(u»nc) sin((jnu) sin(o;n£) [(1-a>nd) Sh(_.n~1*uini; Ch(wn7,)]e"wnd
-ZjJ-1 sin(u<nc) sm(cunu) cos(unf) [(2
+iun-.) Sh(iii„d)-w„d Chlundlje-^n1) -Z-71 sin(ü)nc)vsin(üjnu) sm(u>„{)
n^1[und Chlwndl-IH-Wni)) Sh(üind)]e-"''',> Z--; sin(c_„c) smlwnu) cos(unf) [_•„•, Sh(iurfJ)-wnd Ch(ü)nd)]e"'""'' Z^-; sm(<_nc) sin(iunu) sin(ainf) [l1-uin~0 Shtond)»cjnd Ch(w„d)]e""'"'''
c) Einzellast P
Im Punkte A der polygonalen Platte der Fig. 2.9 greife eine Einzellast P an. Das Gebiet S sei durch den Kreis
o
bestimmt, welcher durch die von A weitest entfernte Ecke des umschriebenen Rechtecks geht. Das System 5, n habe seinen Ursprung in A und gehe durch Parallelver¬
schiebung aus dem x, y-System hervor. Mit 9
-0 und
{c} (2.49)
gilt:
n
=y-yA; *=_
In Polarkoordina¬
ten r und Q mit
U2
+n2)^
(2.50)
are tan
j
hat die Singulari¬
tät einer Einzel¬
last die Form
wo-10
28-7T-D Po2
— =10 OB Oß 04 02 0 02 04 06 Oß 10
Fig. 2.9
wQ(r) 8irD p
¦>r a
(2.51)
und ist somit rota¬
tions -symmetrisch.
Ihre Werte wurden in Fig. 2.9 für
—
<_ 1 wiedergegeben«
36
Aus den Beziehungen (2.50) lassen sich unter Beachtung der Kettenregel die Transformationsformeln
cose
sine
sine
cose
(2.52)
g'ewinnen und damit können die Ableitungen der Singula¬
rität (2.51) berechnet werden. Sie sind in Tabelle 2.3 zusammengestellt. Man sieht, dass die Funktion w von der zweiten Ableitung an im Punkt A singulär wird.
d) Singularitäten für 3 xx w, 3 w, yy
3 w xy
8-T7--D
Differenziert man die Singularität (2.51) nach den Koor¬
dinaten des Einflusspunktes A und setzt man P
=1, so
erhält man die Singularitäten der Einfluss¬
flächen für die
entsprechende Ableitung der Biegefläche. Aus
den Einflussflä¬
chen für die zweiten Ableitun¬
gen im Punkte A lassen sich dann die Einflussflä¬
chen der Momente nach Gl. (2.4) su- perponieren.
Für einen Einfluss¬
punkt A im Innern polygonalen Platte wird das Kreisge¬
biet S wie o
Fig. 2.10
in Fig. 2.9 gewonnen. In Polarkoordinaten ergeben sich folgende Singularitäten (siehe auch Tab. 2.3):
für 3xxw:
wQ(r,e)
= —(2
•tn|
+2
+cos2e) (2.53)
für 3yyw:
wQ(r,e)
= ~(2_nj
+2
-cos2e) (2.54)
für 3 w:
xy
,w0(e)
=g^ sin2e (2.55)
Fig. 2.10 stellt die Singularität (2.54) für 3 w dar und zeigt deutlich das singulare Verhalten im Einfluss¬
punkt. Obwohl die Ordinaten des Schlauches in A unend¬
lich gross werden, ist sein Volumen endlich.
SPEZIELLE SINGULARITÄTEN LASTFALL Einzellost
PSingulontot für
ä-?wSingulontot für
r-r-waxdy Singulontot
fürt—;WFAKTOR
P8rO
1 4t
D
1
4TTD
1
4TTD «.(-.'¦)
=,' l»i i(2ln-i-
+2
+cos29) ^ sin29 ^(2ln-5-*2-cos28) af w» (2
rln-£- +r)
cos9 Jj(3 cos9-cos39) l(sin9 -sm39) ^-(cos9*cos39) 2r di,
'(2
rIn-g-?r)
sin9 J-(sin9-sm39) J-(cos9_cos39) L{Z Sin9
+sin39) d' _f*"»
"
2
ln-j-+2+cos29 4(2 cos29-cos49)
r4(sin29-sin49)
r4cos49 afa~. "•
sin2 9 4(sin29-Sin49)
r4
cos49
r4(sm29*sin49)
rd' di,'
'2 ln-5"*2-cos29 4 C0S49
r4lsin29-sm48) 4("2 cos29-cos49)
raf*
°-(3 cos9-cos39>
r-V(5 cos39-3cos59) 4(sm39-sin59)
r4-(-cos39»3cos59)
r•I"(sin9-sin39)
r-V(3 sin39-3 Sin59)
r-V(-cos39»3cos59)
r-T(sm3fl+
3sin59) df--'
•—(cos9*cos39)
r-1(-cos39+3cos59)
r3-Llsin39*3 sm58)
r•1-1-3 cos39-3 cos58)
r1(3 Sin9*sm39)
r-y(sin39->-3sin58) ¦^¦(-cosse-cosse) -t(-5sin39-3 sm59)
3. BASISMATRIZEN DES DIFFERENZENVERFAHRENS
3.1 Zweidimensionale Taylorentwicklung
0
*-.h—H
\ /
VW
^s\ (-/
1ip
"l
h
"•
1
t y
Fig. 3.1
Von einer Funktion w(x,y) seien
im Punkte 0 (Fig. 3.1) der Funk¬
tionswert sowie die Werte aller benötigten partiellen Ableitungen bekannt. Macht man durch eine Koordinatentransformation 0 zum
Ursprung des kartesischen Systems
x, y und führt mit einer Bezugs- grösse h die nunmehr dimensions¬
losen Koordinaten
=
1 (3.1)
ein,so gilt für den Funktionswert an der Stelle P(£h; nh)
w(5h; nh)
=w|o
+^ (s
•\* 0
*n
•3yw1{))
h2
+
_T («2
•3xxw|o
+25n
•Vlo
+"
N hn
2
•3 W, ) yy \oJ
+ •••' +
RN+1
=w|o
+n=l U U
'äx M
*V w|o
+
R.
N+l (3.2)
Das Restglied RN+, hat dabei die Form
rn+i
"WiTT <*-\
+n-a/wV-h-e^h-n) 0
<0
<1
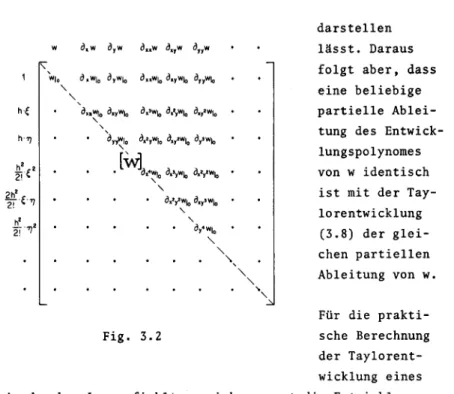
(3.3) Die Entwicklung (3.2) entspricht einer Polynomdarstellung
in £ und n der Funktion w dergestalt, dass die ersten N Ordnungen der partiellen Ableitungen von w und des Poly¬
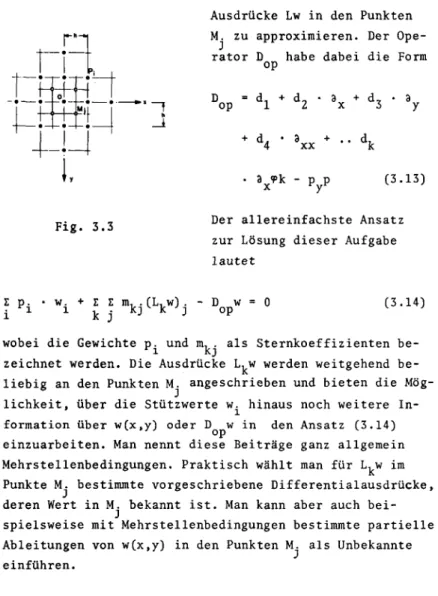
noms im Entwicklungspunkt 0 übereinstimmen. Ein beliebiger Differentialausdruck D (w), wobei D einen zunächst all-
opv op
gemeinen Differntialoperator bezeichnet, lässt sich eben-
-
40
-falls nach (3.2) entwickeln, sofern seine partiellen Ab¬
leitungen im Nullpunkt bekannt sind. Handelt es sich um einen linearen Ausdruck mit dem Operator
L
"al
+Vx
+Vy
+Vx*
+ •••Vx(Vn
"?V (3"4)
und sind zudem die Koeffizienten a. konstant, dann wird wegen der Linearität von (3.2) auch die Entwicklung von
Lw zu einer Linearkombination der Ableitungen von w. Für das Folgende sollen D und L stets als lineare Operato¬
ren mit konstanten Koeffizienten vorausgesetzt werden.
Während die Voraussetzung der Linearität wesentlich für die dargestellten Ansätze ist, kann die Forderung nach konstanten Koeffizienten gegebenenfalls fallengelassen werden.
In der Tabelle 3.1 wurde die Entwicklung (3.2) der Funk¬
tion w sowie des Ausdruckes AAw schematisch dargestellt.
Weiterhin sind in den letzten drei Kolonnen die Darstel¬
lungen von Lw,M
= -D(3 w
+v3 w) und AAw jeweils für
den Nullpunkt wiedergegeben. Die Terme sind nach den Ab¬
leitungen von w in 0 geordnet und mit einer Nummer k ver¬
sehen. Da diese Ableitungen natürlich für alle dargestell¬
ten Ausdrücke den gleichen Wert besitzen, wurden sie in Kolonne 3 aus dem Schema herausgezogen. Zwischen der Ord¬
nung 9 eines Termes und seiner Nummer k besteht die Be¬
ziehung
9
=ent k/8
•k
-7
-1) (3.5)
wobei unter ent(a) die grösste ganze Zahl verstanden wird,
welche £ a ist. Aus der Ordnung 9 errechnet sich die Num¬
mer k
<jdes ersten und k e des letzten zu 9 gehörenden Ter-
mes aus
9 k Faktor w(f h,i) hl AAw((
ht; h) L« M«to AA«to
0 1 "lo 1 1 °1
2 «x-lo ** f °2
3 ay"k> f" V "5
4 a«"lo 2Th' C 04 -0
2 5 a*y"io f* iv °s
6 dyy"io ihr 1
206
-?D
7 ¦»>..*,„ ** V <=7
3 8
9
a«y "io d»y»"io
Vv oe
"s
10 ayyy"io -T*" V °io
11 ¦'»'"lo €' 1 1 011 1
12 d »sy"io fi
•4 13 a »V",0 (7
h.-V 1 2
•2
14 a »y'"io
1=0,
4«V
•15 d /»lo
4
1
1 •1
16
*io
f TT
hf
•17 a «V"l0 -'l TT
h7
•5 18
19
a «V«,,
a «V",o
8*
1=0, s
2 T7h
2 TTh f
1
•20 a "/"lo fV ?V
hf
•21 a/"io v' Tfh 1
•22 a«*"io
• • • • • •• • • • • • • •
• • • • • • • • •