Research Collection
Working Paper
Bending and torsion of thin walled beams with variable, open cross sections
Author(s):
Lonkar, Suresh Publication Date:
1968
Permanent Link:
https://doi.org/10.3929/ethz-a-000747208
Rights / License:
In Copyright - Non-Commercial Use Permitted
This page was generated automatically upon download from the ETH Zurich Research Collection. For more information please consult the Terms of use.
ETH Library
of thin walled
Beams with
variable,
open Cross Sections
Suresh Lonkar
November 1968 Bericht Nr. 18
Institut für Baustatik ETH Zürich
Bending
Beams with
variable,
open Cross Sectionsvon
Dr. sc. techn. Suresh Lonkar
Institut für Baustatik
Eidgenössische Technische Hochschule Zürich
Zürich November 1968
Empty
Leer Vide Empty
Empty
The theory of thin walled beams with open cross section has many applications in practice, e.g. in the analysis of gir- der bridges. For beams of constant section Solutions have been available in the technical literature. However, few publications exist which deal with beams of variable cross section. In this study a Solution for beams with unsymmetri-
cal and variable cross section is presented. A corresponding Computer program for pratical application has been developed.
The author has prepared this study in partial fulfilment of his doctoral work at the Institute of Structural Engineering, Department of Civil Engineering. During his stay he received
a scholarship of the Department of the Interior of the Swiss Federal Government.
Swiss Federal Institute of Technology
Zürich, January 1969
Prof. Dr. B. Thürlimann
Empty
BEAMS WITH VARIABLE OPEN CROSS SECTION
CONTENTS
Page 1. INTRODUCTION:
1.1 Description of the Problem 9
1.2 Literature Review 9
2. DIFFERENTIAL EQUATIONS AND SOLUTIONS:
2.1 Differential Equations for Bending and Torsion of a thin-walled Beam of constant open Cross
Section 11
2.2 Homogeneous Solutions 15
2.3 Particular Integrals 17
2.4 Remarks on the form of the Differential
Equations 18
2.5 Expressions for the Sectional Forces 19
3. FINITE ELEMENTS METHOD FOR A BEAM OF VARIABLE CROSS SECTION:
3.1 Transport Matrix Method 22
3.2 Transport Matrices for Curved Beams 28
3.3 Beams of Variable Section 31
3.4 Conditions of Transfer at the Junction of two
Beam Finite Elements 34
3.5 Nature of the Transport Matrix 40
4. SCHEME OF THE COMPUTER PROGRAM 42
5. NUMERICAL EXAMPLES:
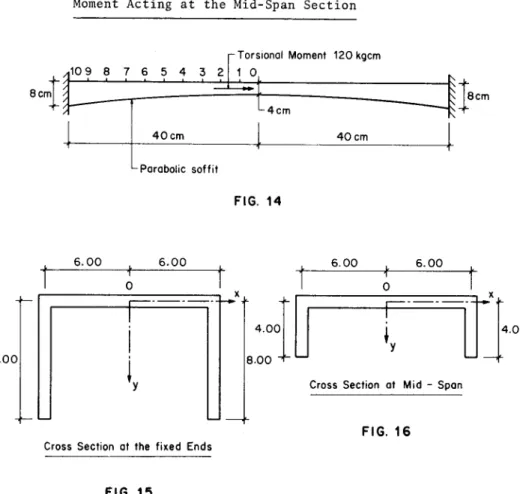
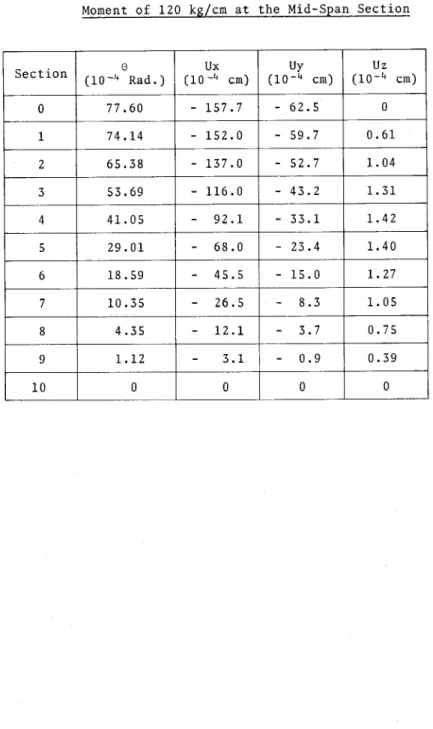
5.1 Fixed Ended Beam with a concentrated Torsional
Moment at the Mid-Span Section 44
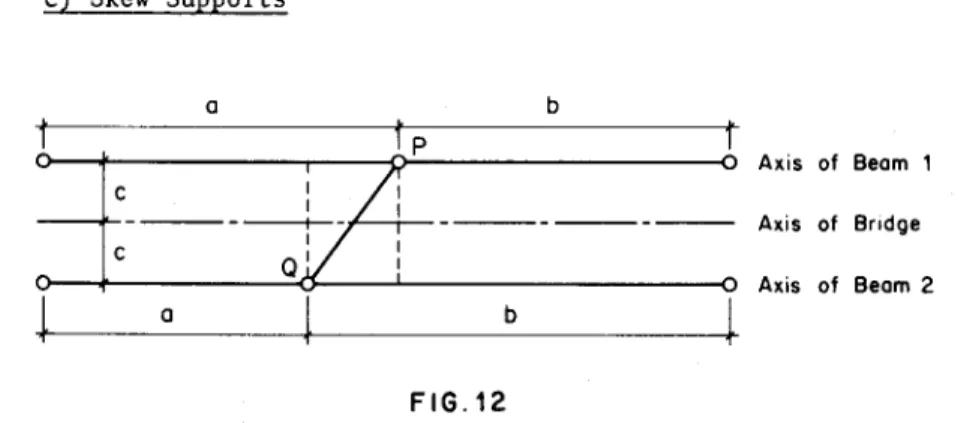
5.2 Three Span Continuous Beam with a Radial Load
at Mif'-Span Section 54
5.3 Two Span Continuous and Curved Prestressed
Concrete Bridge 60
6. SUMMARY 71
7. NOTATION 74
8. BIBLIOGRAPHY 80
APPENDIX
1.1 Description of the Problem
The theory outlined in the present dissertation aims at the general Solution of the problem of bending and torsion of thin walled beams with open cross section. The longitudinal axis of the beam may be straight or curved. The conditions of support of the beam are arbitrary. The cross section may be unsymmetrical and variable along the axis.
1.2 Literature Review
The general problem of torsion of thin walled beams with constant open cross section has been trated by many authors.
A comprehensive review of the pertinent literature on the subject of warping torsion may be found in the last chapter
of the well-known book by V.Z. Vlassov 1 .
On the problem of torsion of thin walled beams with variable open section work has been done by Z. Cywinski
[21
, G. BeckerI 3
J
and Bazant[4J.
Cywinski obtains the differential equa¬tions of torsion for such beams from the minimum principle of potential energy. He uses the finite difference approach
for the Solution of the differential equations with variable coefficients. He compares the results of his theoretical So¬
lution with those obtained from tests on a plexi-glass model.
Becker considers the equation of torsion of a curved beam of constant monosymmetrical section, as derived by Vlassov. For variable sections he imagines the beam to be made up of short pieces of constant section and uses the Solution of the sixth order differential equation mentioned earlier. A similar approach for the analysis of box beams of variable section
has been suggested by Heilig
[5
Both the papers 2 and 3 refer to the case of cross sec¬
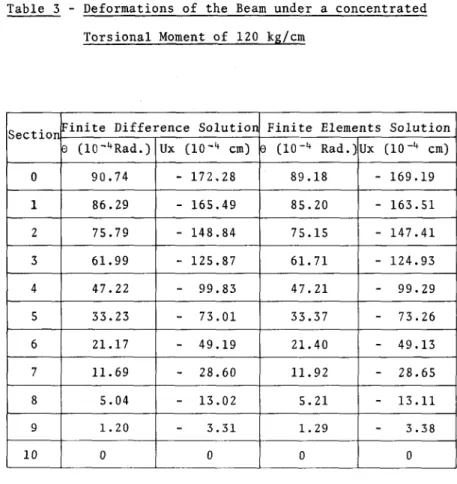
tions with one axis of symmetry. The present work treats the general case of an unsymmetrical section. In paragraphs 5.1 and 5.2 comparisons are made between the Solutions of Cywinski and Becker with those of the present theory.
E. Karamuk
I6J
considers the Solution of the differential equation of torsion of a beam of monosymmetrical open sec¬tion in two parts. In his approach first the St. Venant Tor¬
sional Rigidity is neglected and only the warping Rigidity is considered. The differential equation is then similar to that of plane bending of a beam. Next only the St. Venant Rigidity is considered and the second order homogeneous equation is solved. At discrete points the two Solutions
are coupled to fulfill the conditions of compatibity. The redundant forces are then calculated as in the force method.
The Folded Plate Theory is also discussed.
2. DIFFERENTIAL EQUATIONS AND SOLUTIONS
2.1 Differential Equations of Equilibrium of a Thin
Walled Beam of Constant Open Cross Section
FIG. 1
A complete derivation of the differential equation using the arbitrary coordinate System may be found in reference
Fig. 1 shows an element of a thin walled beam of open cross section. The external loads qX, q , and q act along the
y z
positive directions of the x, y, z axes respectively, when looking from the positive z side. The external torsional mo-
ment m acts clockwise and the positive direction of the mo-
ment vector coincides with the positive direction of the z-
axis, consistent with the left handed System of axes x, y,
z. It may be noted that these are chosen arbitrarily. In the plane of cross section, the x and y axes are neither the axes of symmetry nor the principal axes. The s axis is along
the centre line of the walls of the members and the positive
s direction is in the clockwise sense as seen from the posi¬
tive z side.
The external loads q , q , and q possess the unit kg/cm and the moment m kg.cm/cm. T. and TR are the external shear
forces acting on the left and right hand edges S = S. and S = SR respectively.
Next we consider the deformation of the element under the action of the external loads. The following assumptions are made:
1) The material of the beam is elastic. The Stress-Strain relationship is linear.
2) The deformations of the beam are small in comparison with its dimensions. The conditions of equilibrium of
the undeformed System are also valid for the deformed System (first order theory).
3) The dimensions of the beam are consistent with the des- cription "thin walled". The normal and shear Stresses are constant over the thickness of each element of the cross section.
4) The cross sectional shape remains unchanged. Hence, under external loads, each point in the cross section undergoes rigid body displacements in the plane of cross section. These displacements correspond to three degrees of freedom, and can be expressed as functions of:
a)j The translations U and U of the origin of coordinates
x y &
0, and
b) The rotation 0 of the cross section with respect to the System of axes x, y, z. This is shown in Fig. 2.
5) During deformation the shear strain of the middle sur- face is relatively small and hence neglected. Thus a nor¬
mal to the section remains normal. The warping of the
cross section before deformation
cross section öfter deformation
FIG. 2
cross section in the direction of the beam axis in de- termined by this condition.
A point P in the cross section has coordinates x, y, z, w.
The coordinate w with the dimensions of an area is defined as follows: See Fig. 3.
FIG. 3
ds is an elemental are length along the s axis between ori- gin 0 and the point P and r the distance between 0 and the tangent to ds. Then
w = /rds
0
The point P has three displacements Ux , Uy , and Uz . These
can be expressed in terms of the displacements of the coor¬
dinate origin 0 as follows:
Uxp = Ux - y 9 (1) Uyp = Uy + x 9 (2)
dUx dUy dö
Uzpv = Uz - —- x - —f y - — w (3)
az dz dz
In equation (3), the first three terms on the right hand side represent plane bending and the last term indicates the warping of the cross section. This equation can be derived from the condition of zero shear strain of the middle sur- face of the beam, and is given here without proof.
In many practical cases, the longitudinal edges of the beam
are free, and hence the edge shears T, and TD vanish. The
L K
differential equations of equilibrium may be written as fol¬
lows:
4
Sw\ ,„ /Iwx\ iv /Iwy\ iv „Tv GK ,2 ., n t-Iw/ Uz + \Iw/-r—) Ux- + \Iw/'-z—) Uy- + 6- - =-EIw L 6 = -zE -L
4
(7)
Equations (4) to (7) are due to Vlassov I1I. They are expres¬
sed here in a slightly different form for convenience. It may be particularly noted that the symbol ' represents the derivative with respect to c, whereby c = t is a dimension-
less parameter, L being a reference length of the beam.
The various Symbols used in this paragraph and in all fur-
ther equations are explained in chapter 7.
2.2 Homogeneous Solutions of the System of Differential
Equations
Vlassov lll has given a Solution for a special coordinate system using principle axes reduced to the shear center.
Here a general Solution for the arbitrary coordinate system is presented.
Differentiating equation (4) with respect to ?, the term L • U'"is expressed as:
Substituting for L • U'"in equations (5), (6), and (7) these can be rewritten in the following form:
a^ Ux— + a12Uy— + a138~ = X2 qx - X, g9 qz' (9)
Iv Tv h7 i
a21 Ux— + a22Uy— + a236— = X3 qy - X, g6 qz (10)
a31Ux— +a32Uy- +a338— - a34e" = X4 m- X, g12 qz' (11)
From equation (10)
Tv ^21 Tv Q?^ Tv 1 9g *
Uy- = -— Ux- - —8- + X qy - — X2 qz (iz)
a22 o22 a22 a22
This expression for U —is substituted in equations (9) and (11):
b„ Ux- + b126- = X2 qx + X3 b14 qy - X, g15 qz' (13)
b21 Ux- + b226- - b23 9" = X4 m + X3 b24 qy-X, g16 qz' (14)
From equation (13)
IV °12 „IV X2 . „ b14 9l5
ux- = --^ 8- *
—-q« +x3 -rr^qy-ir^x, qz (15) t>ii &11 t>i1 <>11
This expression for U-Tis substituted in equation (14), which yields after rearrangement:
Cn8--C12e" = X4 m+ y x2 qx + g17 X3 qy - g18 X, qz'
(16) Equation (16) is rewritten in the following form:
8- - ß28" = A m + B qx +C qy -D qz' (17)
This is the final differential equation for the problem of bending and torsion of a thin walled beam with constant open section.
The homogeneous Solution for 6 in equation (17) is of the
form:
6h = C, +C2£ + C3 sinhß £ + C4 cosh ß £ (18)
By inspecting (15), the homogeneous Solution for U is ob- tained as
Uxh = a flh +C5+ C6£ +
C7£2
+C8C3
(19)Equation (12) is solved for Uv as:
Uyh = 910(1 + 92 Uxn + C9+ C10£+
C^C2
+C,2C3
(20)Finally, Integration of equation (4) twice with respect to
? yields:
Uzh = -jj
{(g3öh'+94
Uxh'+ g5 Uyh')+ C13+ C14Cj
(21)The Solutions (18) to (21) involve 14 constants of Inte¬
gration C. to C... They are calculated from the boundary conditions.
2.3 Particular Integrals
The particular integrals for the differential equations (17), (15), (12) , and (4) can be obtained straight forward when the loadings q , q , q , and m are constant or known explicitly as continuous functions of the variable e.
In the following, the particular Solutions for 9, U , U ,
x y
and U are given for constant m, q , q , and q being a linear function of c,.
In this case, the particular integral for e in equation (17) is obtained by inspection as:
a A -2 B ,2 C D , .
6P = ~—2i
m-^? qx-^Iqy+i^Iqz
—(22)or
0p = A0 m+ B0 qx + C0 qy - D0 qz' (23)
In the same way equation (15) yields:
Uxp = <x öp + o2 £4 qx + a3 £4 qy - a4 £4 qz' (24)
Going back to equation (12), the particular Solution for U is seen to be:
Uyp = g, ep+g2 Uxp +r, £4 qy -r2 £4 qz' (25)
Finally from equation (4) the particular Solution for U is obtained as:
Uzp =
r{<93
8p'+ 94 Uxp'+g5 Uyp'J-rj £2(k,£+3k2)]
(26)
The definition of the various Symbols is given in chapter 7.
The complete Solutions for the differential equations (4)
to (7), namely for the displacements U , U , U of the co-
x y z
ordinate origin 0, and the angle of rotation 8 of the cross section are thus as follows:
8 = en +Sp — Equations(18) and (23) Ux = Uxn +Uxp — Equations(19) and (24) Uy = Uyn + Uyp — Equations (20) and (25)
Uz = Uzn +Uzp — Equations(21) and (26)
2.4 Remarks on the Form of the Differential Equations
Referring to equations (4) to (7), the following points be noted:
Equation (4) expresses the equilibrium of the internal and external forces along the z or longitudinal axis.
Equation (5) refers to bending in the xz plane. The ben¬
ding of the element in the yz plane is expressed by equa¬
tion (6). The equilibrium of the external and internal torsional moments is contained in differential equation (7).
In the case of a beam with two axes of symmetry, if x and y are the principal axes, equations (4), (5), (6), and (7) contain terms only in U , U , U , and 0 respectively. The coefficients of the other terms, for example of U , U ,
j
x y
and g in equation (4), would vanish. The Solutions for
U , U , U , and 9 will then be independant of eachother.
In a particular problem this would be automatically taken
care of in Solutions (18) to (21) and (23) to (26).
Choosing the x, y, and z axes arbitrarily and then getting the Solutions for the displacements of the arbitrary ori¬
gin 0, namely U , U , U and the rotation 9 of the cross section leads to a Solution for the general problem of bending and torsion of a thin walled beam of unsymmetri-
cal open cross section.
2.5 Expressions for the Sectional Forces
In paragraphs2.2 and 2.3 Solutions were obtained for U ,
U , U , and 9, which satisfy the differential equations (4)
y z
to (7). The internal forces acting on a cross section can
now be expressed as functions of the derivates of these
displacements.
Referring to Fig. 4 the basic expressions for the normal and shear Stresses at a point P with coordinates x, y, z, s> w are as follows:
(x,y,z,s,w)
FIG. 4
follows:
P F (s) -
/dF
0 P Sx(s) =
J
xdFNormal Stress:
6 =
-jj(L
Uz'-Ux" x- Uy" y-fl" w) (27)Shear Stress:
T =
^(-^)
LUz"+^ Ux'"+^ Uy'".^ ö'")
(28)
The quantities F(s), S (s), S (s), and S (s) are defined as
P
Sy(s) =
/ydF
Q P Sw(s) =
J
wdFQ Q
The point Q lies on the free edge where the shear stress vanishes. While going from Q to P along the centre line of the wall the movement is in the positive s sense. i.e.
clockwise.
The sectional forces are defined as follows:
1) Normal force N =
J
SdFF
2) Bending Moment My =
-J
SxdFF
3) Bending Moment Mx =
J
6ydFF
4) Warping Moment Mw = J SwdF
F
5) Shear Force Qx =
/(Tt)dx
S
6) Shear Force Qy =
J
(Tt)dy7) Torsional Moment T =
J
(Tt) dw + ——GKfl.Where Warping Torsional Moment Ts = — 8'
St. Venant Torsional Moment Tw = / (rt)dw
On using equations (27) and (28) and carrying out the inte- grations, the following expressions are obtained for the Section Forces:
N =
-^|-
(L Uz' - g4 Ux" - g5 Uy" - g3 fl") (29)Mx = ~ (L g6 Uz'-g7 Ux" - Uy"- g8 e") (30)
My =
-^
(L g9 Uz' - Ux" - g10 Uy" - g„ fl") (31)EIw , „ „
Mw =
-j-j- (L g12 Uz - g13 Ux -g14 Uy - 8 ) (32)
Ts = —— 6 (33a)
T« =
^y
(g12 L Uz"-g13 Ux'"-g14 Uy'"- 8'") (33b)L3
EIw .i in ,,,
Ts+ Tw = ——(g12 L Uz -g13 Ux -g14 Uy - 8 +<j>, 8' )
E I (33)
Qx = ~ (L g9 Uz" -Ux"'-g10 Uy"'-g,, 8"') (34)
Qy = -[J (L g6 Uz"-g7 Ux'"-Uy'"-g8 9'") —¦ (35)
The various Symbols used are explained in chapter 7. In the appendix a matrix representation of relations (29) to (35) is given.
3. THE FINITE ELEMENTS METHOD FOR BEAMS OF VARIABLE
SECTION
3.1 The Transport Matrix Method
This method is discussed for Beam Bending problems by Zurmühl 7 . Still, the essentials will be presented here for the sake of clarity with the help of a simple illustra¬
tive example. In the following simple bending of a canti- lever beam is considered.
El = constant
T"
FIG. 5
Fig. 5 shows a cantilever beam LR of length a. The beam is prismatic and its cross section has two axes of symmetry x, and y. It carries a concentrated load P at the free end R.
Using the transport matrix method the bending moment and the shear force at the fixed end L and the slope and verti- cai deflection at the free end R are to be calculated.
The Differential Equation of equilibrium in the plane yz of the load is:
d4 Uy d-C«
qy o^
E I * = ö
The Solution for Uis
Uy = A+ B£ +
C£2+D£3
, (36)A, B, C, D being the constants of Integration
Slope dUy
dz 1 «ü* =
1[B+C
2t*D3C»] ¦ (37)a d£ a L J
2 2
Bending Moment M = -E I^-^ =- ^| ^-^ = - ^ [2C+6D£l
dz2 a2 d£2 a2 l J
(38)
o. n dM 1 dM EI „
Shear Force Q = -— = — -r—= - 6D
dz a d£ a3 (39)
Equations (36) to (39) are written in Matrix form as follows
Uy
a d£
M
1 c £2 C3 A
0 1
a
2£
a
3«!
a
B
0 0 2EI
"
a2 a2 g C
0 0 0 6EI
"
a3 - D
(40)
Boundary Conditions
a) Free End £ = 0, 1) M = 0, 2) Q = -P
b) Fixed End £ = 1 , 3) Uy = 0, 4) -
^
= 0 a d£For a particular value of , the quantities on the left hand side of equation (40) constitute a vector called the
"State Vector".
The State Vector
[SR1
at the free end is given by:w
-U/R
1 /dUy'/dUy\
Vd£/R
a\d£
0
-P
10 0 0
0-00a
0
0-^0
a2
0 0 0 --6EI
(41)
In Matrix notation equation (41) is written as
[SR]
=[x]
•[COM]
(42)Here
IXJ
is the 4x4 Matrix on the right hand side ofequation (41) , and I
CONJ
is the vector of the four constantsof Integration A, B, C, D.
Similarly, the State Vector at the fixed end L is given by:
[SL]
2EI 6EI"
a2 a2
0 -6EI
Or in Matrix notation:
[sL]
=[y]
¦[CON]
(43)Premultiplying both sides of equation (42) by the inverse matrix
|x|-1,
it is rewritten as[CON]
=[x]"1- [SR]
— (44)Substituting this expression for the vector [CONJ in equa¬
tion (43):
N
=W-WM8»]
[TR]LR
•[SR]
— (45)In equation (45) the "Transport Matrix"
[tr1r
is given by:m*
-m
¦[*r
X being a diagonal matrix,
Inverse Matrix
[»r
10 0 0
0 a 0 0
2E1
0 -:
6EI
146)
By the rules of Matrix multiplication, the Transport Matrix
[tr]
is obtained as:Mi
-0 1
"2EI 6EI
EI 2EI
0 0 1a
0 0 0 1
|L
(47)
Substituting this expression for [tr]r, Matrix equation (45) is rewritten as:
0
0
1
0
Equation (48) yields:
O2 g3
°
2EI 6EI
1 °- °2
"EI 2EI
UyR l/dUy\
aVd£yR
-P
(48)
(Uy)R
1_/dUy\
a\d£/fl
-Pa
Po3
3EI
_ p02 2EI
The results are consistent with the chosen sign Convention.
This method is now extended to the problem of bending and torsion of thin walled beams. In this case the State Vector has fifteen rows. These are:
The seven Deformations:
Ux, Ux', Uy, Uy', Uz, fl, and ö'
The seven Section Forces:
N, Mx, My, Qx, Qy, T, ond Mw
and the term Unity which takes care of the particular Solu¬
tions and their derivatives in the matrix Operations.
For the sake of convenience, the above quantities, namely the Deformations and Section Forces are multiplied by sui- table multipliers to get well conditioned transport matrices.