Grundlagen der Elektromobilität
Inhaltsverzeichnis
Grundlagen der Elektromobilität...1
1 Energiespeicher...4
1.1 Energiespeicher im Vergleich...4
1.2 Energiespeicher Akku ("Batterie")...5
1.3 Energiedichte, Wirkungsgrad, Einsatzgebiete verschiedener Akkutypen...7
1.4 Funktionsweise Li-ION-Akku...8
1.5 Gruppenarbeit zu Redox-Flow-Batterien...9
1.6 Redox-Flow-Batterie (Ergebnisse)...10
1.7 Redox-Flow: Revolution in der Elektromobilität?...11
1.8 Redox-Flow: Speicher für große Energiemengen...12
2 Warum Elektroantrieb?...13
2.1 Verbrennungsmotor vs. Elektroantrieb Darstellung aus Sicht des Herstellers eines Umrüstkits... 13
2.2 Wichtige Kenngröße: das Drehmoment M...14
2.3 Aufgabe: Vergleich Energiespeicher Akku und Diesel...17
2.4 Aufgabe: Akku in einem Pedelec...18
2.5 Lösung zu 2.3 Aufgabe: Vergleich Energiespeicher Akku und Diesel...19
2.6 Lösung zu 2.4 Aufgabe: Akku in einem Pedelec...20
3 Funktionsprinzip Gleichstrom-Motor...21
3.1 Magnetfeldlinien...21
3.2 Durchflutungsgesetz...21
3.3 Kraftwirkung auf stromdurchflossenen Leiter im Magnetfeld...21
3.4 Stromdurchflossener Rotor (Leiterschleife) im Magnetfeld...22
3.5 Kommutierung...23
3.6 Pedelec-Motor für Hinterradnarbe (Bionx)...24
3.7 Pedelec-Motor für Tretlagerantrieb (Panasonic)...25
3.8 Pedelec-Motor mit innenliegendem Rotor...26
3.9 Induktionsgesetz...27
3.10 Motorersatzschaltbild...28
4 Berechnungen und Messungen zum Motor im E-Bike, Pedelec...29
4.1 Versuchsaufbau Messungen an der Gleichstrommaschine...29
4.2 Messung der Leerlaufdrehzahl in Abhängigkeit von der Klemmenspannung...30
4.3 Messung des Klemmenstroms in Abhängigkeit vom Drehmoment...31
4.6 Berechnung der Klemmenspannung für 50 % Motorunterstützung...34
4.7 Kennlinienschar erforderliches Drehmoment...37
4.8 Ermittlung der Motorkonstanten aus den Daten im Nennbetrieb...37
4.9 Energieverbrauch in der Ebene, berechnet mit Motordaten...38
4.10 Kennlinienscharen P(v) und η(v) mit Parameter Steigung...41
4.11 Berechnung des Energieverbrauchs mit Leistung und Wirkungsgrad...42
4.12 Heimfahrt... 43
4.13 Betriebskosten E-Bike gegenüber Auto mit Verbrennungsmotor...44
4.14 Arbeiten mit Leistungshyperbeln...45
5 Steuerschaltungen...46
5.1 Eigenschaften verschiedener Transistoren...46
5.2 Datenblatt-Beispiele...49
5.3 Pulsweitenmodulation PWM...50
5.4 Transistor als Verstärker oder elektronischer Schalter...54
5.5 Übung Berechnungen zu Transistorschaltungen...55
5.6 Transistorbrücke zur Richtungsumschaltung...56
5.7 Spule an geschalteter Gleichspannung...59
5.8 Tiefsetzsteller...62
5.9 Tiefsetzsteller zur Motorsteuerung...64
5.10 Vergleich zwischen linearem Spannungsregler und Tiefsetzsteller...68
5.11 Vergleichs-Berechnungen Tiefsetzsteller und Spannungsregler...70
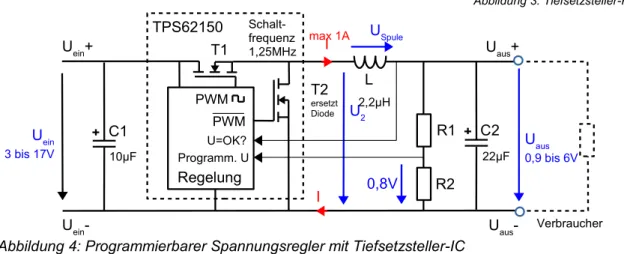
5.12 Übung: Tiefsetzsteller-IC ersetzt linearen Spannungsregler...71
5.13 Tiefsetzsteller für energiesparende LED-Beleuchtung...72
5.14 Der Vorteil eines Tiefsetzstellers gegenüber einem Vorwiderstand...73 Version: 05.11.17, 07:04
1 Energiespeicher
1.1 Energiespeicher im Vergleich
(Quelle: Wikipedia, http://de.wikipedia.org/wiki/Elektroauto, 21.12.2012)
Zentraler Punkt in der Entwicklung von Elektrofahrzeugen ist der Energiespeicher mit hohen Energiedichte. Erst dann können Elektroautos Reichweiten erzielen, die denen von verbrennungsmotorisch angetriebenen Autos ebenbürtig sind.
In der folgenden Tabelle wird verglichen, welchen Treibstoffvorrat ein Auto bei
unterschiedlichen Antriebsarten laden und transportieren muss, um ohne Nachzutanken etwa 400 km weit zu fahren. Dafür benötigt man etwa 50 kWh Antriebsenergie.
Es fließen Schätz- und Mittelwerte ein, daher gilt bei allen Zahlenwerten eine Toleranz von etwa ±30 %.
Anmerkungen:
• Bei Nutzbremsung wird der Energiespeicher aufgeladen. Die Ersparnis hängt dabei maßgeblich von der Fahrweise ab, darüber hinaus von der Dimensionierung der Antriebe und dem Wirkungsgrad der Leistungselektronik.
• Die Energiedichte bei Benzin, Diesel und Wasserstoff ist als unterer Heizwert angegeben. Mit geeigneten Maschinen kann auch der obere Heizwert bzw. Brennwert des Kraftstoffs genutzt werden, der ca. 10 % höher ist.
• Diesel- und Ottomotor laufen nicht ständig bei optimaler Drehzahl und Belastung, deshalb liegen die mittleren Wirkungsgrade deutlich unter den Maximalwirkungsgraden 45 % bzw. 30 %. Der Wirkungsgrad ist hier auf den unteren Heizwert des Treibstoffs bezogen.
• Bei Akkus ist die Masse des Behälters im Wert der Energiedichte bereits enthalten, bei Diesel, Benzin und Wasserstoff muss er addiert werden. Aufgrund der leichten Elektromotoren, des Wegfalls eines Schaltgetriebes, der Auspuffanlage und der Startbatterie ergeben sich beim Elektrofahrzeug weitere Gewichtseinsparungen, die hier nicht berücksichtigt sind.
• Bei den mit * gekennzeichneten Werten wurde die Gesamtmasse von Bub gegenüber dem Original verändert, da dort niedrigere Werte angegeben wurden und nicht ersichtlich ist, woher diese Werte stammen.
1.1.1 Berechnung des Kraftstoffverbrauchs aus der gegebenen Tabelle
Aufgabe: Wieviel Liter Diesel pro 100km benötigt ein Auto mit den oben dargestellten werten? Dichte Diesel: 0,83 kg/L
18kg 0,83 kg
=21,7L
pro 400km => 21,7L
400km=0,0542 L
km= 5,4L 100km
Ermittlung der Masse des Energiespeichers für eine Reichweite von 400km
Treibstoff
Energie- dichte (kWh/kg)
Antriebskomponente
mittlerer Wirkungsgrad des Antriebs
Gesamtmasse des Energiespeichers in kg für 50 kWh nutzbare Energie
Strom aus
Bleiakkumulator 0,03 Elektromotor mit Nutzbremse
95 %
bis zu 97 % 1718*
Strom aus Lithium-Ionen-
Akkumulator 0,13 Elektromotor mit Nutzbremse
95 %
bis zu 97 % 396*
Dieselkraftstoff 11,8 Dieselmotor mit Getriebe
25 %
23,5 % 18 (+5 Tankbehälter) Superbenzin 11,1 Ottomotor
mit Getriebe 15 %
14 % 32* (+5 Tankbehälter) Flüssiger
Wasserstoff 33,3 Wasserstoffspeicherung Brennstoffzelle PAFC Elektromotor
38 % und 95 %
4,1 (+Tankbehälter)
Druckwasserstoff 700 bar
Wasserstoffspeicherung Brennstoffzelle PEMFC Elektromotor
60 % und 95 %
3 (+125 Tankbehälter)
1.1.2 Ermittlung der zu Grunde liegenden Berrechnungsformel
Welche Berechnung liegt der obenstehenden Tabelle zugrunde?mSpeicher(50kWh) = 50kWh
Energiedichte i n kWh
kg ⋅Wirkungsgrad Beispiel Diesel: mSpeicher(50kWh)= 50 kWh
11,8 kWh kg ⋅0,234
=18,1kg
Beispiel Litium-Ionen-Akku: mSpeicher(50kWh) = 50kWh 0,13 kWh
kg ⋅0,97
=396kg
1.1.3 Energieverbrauch für 100km
Der Tabelle wurde ein Energieverbrauch von 50kWh für 400km zugrunde gelegt.
Dies entspricht einem Energieverbrauch von 50kWh
400km=12,5kWh 100km . Vergleich aktueller Elektrofahrzeuge:
(Quelle Tabellenauszug: http://de.wikipedia.org/wiki/Liste_von_Elektroautos_in_Serienproduktion 27.12.2012)
1.2 Energiespeicher Akku ("Batterie")
(Quelle: Universität Stuttgart, Institut für Energiewirtschaft und Rationelle Energieanwendung Prof. Dr. Ing. A. Voß: Entwicklungsstand und Perspektiven der Elektromobilität, Dez 2009)
Die Batterie ist ein elektrochemischer Energiespeicher, bei dessen Entladung chemisch gespeicherte Energie über eine elektrochemische Redoxreaktion in elektrische Energie umgewandelt wird. Bei geeigneter Paarung von Anoden- und Kathodenmaterial findet an der Anode eine Stoffoxidation statt (Abbildung 2-2). Die freiwerdenden Elektronen wandern über einen elektrischen Verbraucher zur
Kathode und führen dort zu einer
Stoffreduktion. Gleichzeitig kommt es über den Ionenstrom durch einen Ionen leitenden Elektrolyten zu einem Ladungsausgleich zwischen Kathode und Anode. Bei Akkumulatoren sind diese Reaktionen umkehrbar (reversibel), sodass die Batterie bei Zufuhr elektrischer Energie wieder aufgeladen werden kann.
Abbildung 2-2: Schematische Darstellung einer Batterie während der Entladung
Modell Sitze Reich- weite (km)
Vmax (km/h)
Verbrauch je 100km (kWh)
Ladezeit Standard (Stunden)
Kapazität Fahrbatterie (kWh)
Gewicht leer mit Akku (kg)
monatl.
Produktion
Mitsubishi i-MiEV
4 150 130 13,5 6 16 1110 5650
Nissan
Leaf 5 175 150 21 [21] 7 (3,3kW)
10 (2,3kW) 24 1520 3300
Tesla 5(+2) 483 201 17 24 85 2108 1000
1.2.1 Anforderungen an Akkumulatoren in Fahrzeugen
Der entscheidende Faktor für die Verbreitung von Elektrofahrzeugen sind die Batterien, die allerdings zuerst noch weiterentwickelt werden müssen. Als Hindernisse sind hier vor allem ihre derzeit hohen Kosten, die niedrige Energiedichte sowie der daraus resultierende große Platzbedarf zu nennen. Sie führen dazu, dass der Einsatzschwerpunkt für Batterie
betriebene Elektrofahrzeuge vornehmlich auf Kurzstrecken gesehen wird. Ein weiterer entscheidender Nachteil gegenüber Verbrennungsmotoren ist die lange Aufladezeit für Batterien von meist mehreren Stunden, die mit einer konventionellen Fahrzeugbetankung nicht konkurrieren kann. Mithilfe von Schnellladesystemen lässt sich diese Zeit bei einigen Batterievarianten zwar deutlich reduzieren, jedoch ist damit zumeist auch eine Abnahme der Lebensdauer verbunden.
Gewünschte Eigenschaften von Akkumulatoren in Elektrofahrzeugen sind:
• hohe Energiedichte zur Ermöglichung großer Reichweiten
• hohes Leistungsvermögen zur Anpassung an unterschiedliche Fahrgeschwindigkeiten
• guter Ladewirkungsgrad, möglichst verbunden mit einer Schnellladefähigkeit
• ausreichende mechanische Stabilität
• Belastbarkeit bezüglich hoher und tiefer Temperaturen
• lange Lebensdauer
1.2.2 Blei-Akku
Die älteste wieder aufladbare Batterievariante ist die Blei-Säure Batterie (Pb-PbO2), die zurzeit in fast allen Fahrzeugen als Starterbatterie eingesetzt wird. Ihre Eigenschaften sind
• ausgereift
• hohe Verfügbarkeit
• niedriger Preis
• niedrige Energiedichte
• fehlenden Schnellladefähigkeit
Die Bleibatterien sind daher für Elektroautos ungeeignet.
1.2.3 Ni-Cd- und Ni-MH-Akku
Die Nickel-Cadmium Batterie (Ni-Cd) gehört ebenfalls zu den ältesten wieder aufladbaren Batterietypen, ist in der EU aufgrund der toxischen und kanzerogenen Eigenschaften von Cadmium seit einigen Jahren verboten (es existieren jedoch viele
Ausnahmegenehmigungen).
Die Nickel-Metallhydrid (Ni-MH) Batterie ist eine viel genutzte Batterie für elektromobile Fahrzeuganwendungen dar (z. B. Toyota Prius Hybrid). Ihre Vorteile liegen in einer akzeptablen Energiedichte sowie einer hohen Anzahl erreichbarer Ladezyklen bei fehlendem Memory-Effekt.
1.2.4 Li-ION-Akku
Als weltweit erster Mobilhersteller verwendet Mercedes Benz die Lithium-Ionen Batterie ab 2009 serienmäßig im S 400 BlueHybrid. Neben der im Vergleich zur Ni-MH Batterie
deutlich höheren Energiedichte der Li-Ion Batterie (Tabelle 2-1) zählen die folgenden Punkte zu ihren weiteren positiven Eigenschaften:
• kein Memory Effekt
• keine Verwendung toxischer Substanzen
• 40 % kleiner und nur etwa halb so schwer wie vergleichbare Ni-MH Batterien,
• derzeit bis zu 1000 Ladezyklen
• Verwendung preislich unkritischer Rohstoffe
Dem stehen jedoch derzeit noch eine Reihe von Problemen entgegen, die es durch konsequente Weiterentwicklung dieser Technologie zu lösen gilt. Dazu zählen:
• extreme Empfindlichkeit gegenüber Überladung,
• mögliche Selbstzündung bei zu starker/schneller Entladung/Ladung
• empfindlich gegenüber Tiefentladung,
• momentan noch zu teuer
Eine vielversprechende Weiterentwicklung der Li-Ion Batterie ist die Lithium-Polymer Batterie (Li-Po), die statt eines flüssigen Elektrolyten einen Elektrolyten auf Polymerbasis verwendet. Energie- und Leistungsdichte lassen sich so nochmals steigern. Des Weiteren kann sie mit dem flexiblen Polymer als Elektrolyt quasi jede Form annehmen.
1.3 Energiedichte, Wirkungsgrad, Einsatzgebiete verschiedener Akkutypen
(Quelle: http://de.wikipedia.org/wiki/Akkumulator)
Akkumulatortyp Energiedichte (Wh/kg)
Ladewirkungs- grad
Besonderheit Einsatz
Bleiakkumulator 30 60–70 % Starterbatterie Auto
Lithium-Ionen- Akkumulator auf der Basis von LiCoO2
120–210 90,00% neuere Modelle schnellladefähig
Handy, Laptop
Lithium-Polymer- Akkumulator
140 90,00% praktisch beliebige Bauform möglich
Lithium-Eisen- Phosphat-Akkumulator
80-100 90,00% schnellladefähig,
hochstromfähig, eigensicher Lithium-Titanat-
Akkumulator
70–90 90–95 % schnellladefähig Natrium-Nickelchlorid-
Akkumulator (Zebra-Batterie)
100–120 80–90 % 300 °C Betriebstemperatur, keine Selbstentladung aber Heizverluste 10-20%
Nickel-Eisen-
Akkumulator 40 65-70 % sehr unempfindlich gegen
Über- und Tiefenentladung Nickel-Cadmium-
Akkumulator 40–60 70,00% EU-weit verboten, aber mit vielen Ausnahmen.
Nickel-Metallhydrid- Akkumulator
60–110 70,00% Nachfolger Ni-Cd-Akkus A, AA, AAA -Zellen 1,2V
Zinn-Schwefel-Lithium- Akkumulator
1100 ? Experimenteller Prototyp[6]
1.4 Funktionsweise Li-ION-Akku
Aufbau
Eine Lithium-Ionen-Zelle besteht aus
• Grafit-Elektrode (negativ)
• Lithium-Metalloxyd-Elektrode (positiv)
• Mikroporöser Seperator, der nur für die Lithium-Ionen durchlässig ist und die beiden Seiten trennt.
Das Lithium-Metalloxyd kann Mangan, Nickel oder Kobalt sein. Die Zusammensetzung hat Einfluss auf die Eigenschaften des Lithium-Ionen- Akkus und ist je nach Hersteller und Güteklasse unterschiedlich. Die Nennspannung von Li-Ionen- Zellen ist abhängig vom Elektrodenmaterial und liegt bei 3,6 oder 3,7 Volt.
Lithium ist das leichteste Metall und reagiert heftig mit Wasser. Deshalb kommt als Elektrolyt ein wasserfreies, aber brennbares Lösungsmittel zum Einsatz. Das
Lösungsmittel ist der Grund, warum es gelegentlich Meldungen von explodierenden oder brennenden Notebook-Akkus gibt. Hierbei hat sich das Elektrolyt entzündet. Die genaueren Gründe sind vielfältig. In der Regel kommt es zu Akku-Rückrufaktionen, wenn fehlerhafte Li-Ionen-Akkus festgestellt werden.
Aufladen:
Zum Aufladen werden mit dem Ladegerät Elektronen bereitgestellt, welche am Minuspol anliegen. Es wandern Li+Ionen durch das Elektrolyt bis hin zum Graphit, wo sie sich mit einem e- zusammen Einlagern. Auf der Seite der Kathode bleiben nun
negative Ionen übrig.
Dieser Vorgang wird fortgeführt bis alle Li+ eingelagert und mit einem e- versehen sind.
Geladener Zustand:
Im Geladenen zustand sind im Graphit die Lithium-Atome eingelagert. Die
Stromquelle wird entfernt und der Akkumulator ist einsatzbereit.
Entladen:
Beim Entladen wird nun ein Verbraucher angeschlossen, welcher nun eine Art Brücke für die e- bildet. Sie wandern durch ihn hindurch zur Kathode, wo sie sich im Metall einlagern. Zeitgleich wandern die Li+Ionen zurück durch das Elektrolyt zu den Ionen und bilden vereinfacht wieder Lithiumoxid.
1.5 Gruppenarbeit zu Redox-Flow-Batterien
Erkundigen Sie sich im Netz über Forschungen zu Redox-Flow-Batterien.
Quellen: z.B. Wikipedia und
https://www.ict.fraunhofer.de/content/dam/ict/de/documents/medien/ae/AE_Redox_Flow_B atterie_V03-1_de.pdf
http://www.energie-experten.org/erneuerbare-energien/photovoltaik/stromspeicher/redox- flow-batterie.html
http://www.ingenieur.de/Themen/Automobil/Elektroautos-Redox-Flow-Batterie-koennen- wirklich-fahren
Gruppe1: Blockschaltbild und prinzipielle Funktionsweise
Gruppe2: Vergleich der Energiedichte mit herkömmlichen Akkumulatoren, mögliche Einsatzgebiete.
Gruppe3: Geplanter Einsatz in der Elektromobilität: Blockschaltbild, prinzipielle
Funktionsweise und Vorteile gegenüber der Verwendung von herkömmlichen Akkus im Auto
Gruppe4: Bericht über Versuche in der Elektromobilität
1.6 Redox-Flow-Batterie (Ergebnisse)
Die Redox-Flow-Batterie (Flüssigbatterie, Nasszelle) ist ein Akkumulator, der elektrische Energie in chemischen Verbindungen speichert.
1.6.1 Eigenschaften
• Zwei energiespeichernde Elektrolyte zirkulieren in zwei getrennten Kreisläufen.
• Dazwischen ist eine Membran, über die der Ionenaustausch erfolgt.
• In der Zelle werden dabei die gelösten Stoffe chemisch reduziert bzw. oxidiert, wobei elektrische Energie frei wird.
• Aufwändige Konstruktion mit Tank, Rohrleitungen und mindestens zwei Pumpen.
• Der bisher am häufigsten eingesetzte Typ ist der Vanadium-Redox-Akkumulator.
• Der Einsatz in der Elektromobilität ist Gegenstand von Forschungen.
• Die gelösten chem. Verbindungen werden von der Zelle getrennt in beliebig großen Tanks gespeichert. Daher ist die gespeicherte Energiemenge unabhängig von der Zellengröße.
• Zellspannung: 1 V bis 2,2 V.
• Forschung 2015: Basis von Eisen und Zink → Preis mittelfristig 100 Dollar pro kWh
→ konkurrenzfähig zu Pumpspeicher- und Druckluftspeicherkraftwerken
→ Die Leistungsdichte 680 Milliwatt pro Quadratzentimeter
1.6.2 Aufbau und Funktionsweise
Die Halbzellen des Plus-Pols und des Minus- Pols werden von den Elektrolytlösungen durchströmt und sind durch eine ionen- leitende, semipermeable Membran getrennt.
Durch die Potentialdifferenz der Elektrolyten kann an den Elektroden eine Spannung abgegriffen werden. Wird der Stromkreis geschlossen, setzt sich die elektrochemische Reaktion in Gang und der Stromfluss beginnt.
Zur Ladung der Elektrolyte wird eine äußere Spannung an die Zelle angelegt und die Reaktion in den Halbzellen verläuft in die entgegengesetzte Richtung. Der Elektrolyt wird dadurch geladen.
Einzelne Zellen lassen sich wie bei einer Brennstoffzelle in Reihe zu einem
Batteriestapel, dem sogenannten »Stack«, verschalten. Die Stacks werden wiederum fluidisch als auch elektrisch zu Batterien verschaltet.
Da es sich bei Redox-Flow-Batterien um eine Speichertechnologie mit externem Speicher handelt, können Leistung und Kapazität der Batterie unabhängig voneinander skaliert werden: die Elektrolytmenge bestimmt die Batteriekapazität, die Fläche und Anzahl der Stacks die Batterieleistung.
Abb 1 Redox-Flow-System
Quelle (Bild und Text): Fraunhofer ICT
https://www.ict.fraunhofer.de/content/dam/ict/de/documents/medien/ae/AE_Redox_Flow_B atterie_V03-1_de.pdf
Schematische Darstellung der Vorgänge innerhalb eines Redox-Flow-Systems.
Typ Zellspannung Energiedichte pro Liter
Elektrolytflüssigkeit Vanadium-Redox-Akkumulator 1,25 V 15 – 25 Wh/l Natriumbromid-Redox-Akkumulator 1,54 V 25 - 50 Wh/l
Zink-Brom-Akkumulator 1,85 V 50 - 80 Wh/l
Zum Vergleich: Bleiakku 12 V 80 Wh/l
Zum Vergleich Dieselkraftstoff 10.000 Wh/l
1.6.3 Vor- und Nachteile
Vorteile Nachteile
Keine Selbstentladung der Batterie Hohes Gewicht wg. komplexem Aufbau Wirkungsgrade weit über 80% Erschwerte Montage und Aufstellung Hohe Lebenserwartung Geringe Energiedichte bedingt höheren
Platzbedarf Über 10.000 Ladezyklen möglich noch sehr teuer Speicherkapazität unabhängig von ihrer
elektrischen Leistung skalierbar
Vanadium-Elektrolyte nicht in großen Mengen verfügbar, teuer und chemisch relativ instabil
Quelle: http://www.energie-experten.org/erneuerbare-energien/photovoltaik/stromspeicher/redox-flow-batterie.html
1.7 Redox-Flow: Revolution in der Elektromobilität?
Sensation oder sensationeller Flopp? NanoFlowCell, eine der umstrittensten Elektromobilitäts- Firmen, verspricht seit Jahren Elektroautos mit nicht für möglich gehaltenen Werten in Sachen Fahrleistung und Reichweite – mit einem Elektrolyt zum Nachtanken.
Im Gegensatz zu üblichen Batterien wird bei der Redox-Flow-Batterie nicht direkt aufgeladen, sondern zwei vorher extern aufgeladene flüssige Elektrolyten, wie bei einem Tankvorgang, einfach ausgetauscht. Das ermöglicht superschnelle Ladezeiten wie bei Diesel oder Benzin.
Laut NanoFlowCell ist es gelungen, Energiedichten bis zu 600 Wh pro Liter mit seiner streng geheimen Zusammensetzung herzustellen. Reichweiten über 1.000 km mit Nachtankzeiten von rund vier Minuten bei einer quasi kaum alternden Batterie seien möglich (über 10.000 Zyklen).
Mit dem auf 48 Volt-Technik basierenden Kleinwagen Quantino sei man mit zwei 159-Liter- Elektrolyttanks schon über 14 Stunden mit 50 bis 80 km/h am Stück gefahren.
Thema Nachtanken: „Da unser Bi-Ion toxikologisch unbedenklich ist, keine Hochdrucktanks braucht und auch nicht entflammbar ist, lassen sich entsprechende Tankstationen leicht aufbauen.
Quelle: Auto, Motor und Sport, 07.10.2016, http://www.auto-motor-und-sport.de/fahrberichte/nanoflowcell-quantino-fe-im-fahrbericht-elektroauto-nachtanken-11566204.html
Was das Unternehmen aber weiter verschweigt, ist die Funktion seiner Flusszellentechnologie. Dr.
Peter Fischer, Gruppenleiter Redox-Flow-Batterie am Fraunhofer-Institut für Chemische Technologie: „Für den mobilen Einsatz besitzen die meisten Redox-Flow-Batterien zu geringe Energiedichten“ Auch die Aussage der Umweltfreundlichkeit bezweifelt er: „Häufig sind die
Batterie-Elektrolytlösungen als umweltgefährdend eingestuft, da es sich in der Regel um in Säuren oder Laugen gelöste Metallsalze handelt.“ Quelle: Konsturktionspraxis,Vogel Business Media GmbH & Co.KG
http://www.konstruktionspraxis.vogel.de/flusszellentechnologie-ein-durchbruch-fuer-die-elektromobilitaet-a-526670/
nanoFlowcell behauptet: http://emagazine.nanoflowcell.com/de/technologie/300kmh-im-weltweit-ersten-strom-sportler-mit-48v-niedervolt-flusszellenantrieb/
Uns ist es gelungen, den Energiefluss der Flusszelle messregeltechnisch zu steuern, daher können wir auf schwere und kostentreibende Super-Kondensatoren verzichten, die bis dato als Pufferspeicher für die Fahrenergie (bremsen) eingesetzt wurden. Die nanoFlowcell®-Flusszelle erreicht 100.000 Kilometer ohne in den Wartungsmodus zu gehen.
Aktuell sind im nanoFlowcell 48VOLT Flusszellensystem des QUANTiNO drei Membranen verbaut, an denen die bi-ION Elektrolytflüssigkeit entlang geleitet wird und reagieren kann. Die Dauerleistung des Flusszellensystems liegt bei 80 bis 90 kW, das Fahrzeug legte mit 2x 95 Litern Elektrolytflüssigkeit eine Gesamtstrecke von 1.401 Kilometern zurück
Fluss-Batterie Verbrauch
Typ: nanoFlowcell® (Flusszelle) Kraftstoffart: Elektrischer Strom
Spannung (V): 48 Energieverbrauch: 12 kWh / 100 km
Nennstrom (A): max. 300 Tankvolumen (l): 2 x 95
Kapazität (kWh): 85 Reichweite (km): >1.000
Schädliche Emissionen (g): 0
1.8 Redox-Flow: Speicher für große Energiemengen
Eine der weltweit größten Redox-Flow-Batterien steht in einer japanischen Windkraftanlage und ist in der Lage, 4 Megawatt Leistung mit einer Speicherkraft von 6 MWh zu liefern.
Beim Fraunhofer-Institut ICT im Pfinztal bei Karlsruhe wird zur Zeit eine Redox-Flow-Batterie getestet:
Quelle: https://www.ict.fraunhofer.de/de/komp/ae/rfb.html
Winkraftanlage: Höhe 100m Rotordurchmesser 82m Batteriespannung 1200 V
Redox-Flow-Batterie 30m x 21m Spitzenleistung 2 MW 1 Stack = 40 Zellen 4KW, 6KWpeak
Tank 33,6 m x 21 m Speicher 20 MWh
1 Stack mit 40 Zellen 1 Batterie besteht aus mehreren Stacks, darunter die Tanks
2 Warum Elektroantrieb?
2.1 Verbrennungsmotor vs. Elektroantrieb
Darstellung aus Sicht des Herstellers eines Umrüstkits.
2.1.1 Informationen zu Leistung und Verbrauch
• Elektro-Motor BEA-AC25
• Batterie-Spannung 100V
• max. Motorleistung (P) 25kW
• max. Drehmoment (T) 120Nm
• max. Motordrehzahl 6000 U/min
• Motor 30cm x 35cm, 60kg
Im Lieferumfang des BEA-tricks-Umrüstkits ist ein konfektionierter Akkublock vom Typ Lithium Ionen enthalten. Der BEA-tricks-Akkublock hat eine Nennspannung von 100Volt.
Das ergibt bei einer Kapazität von 176Ah eine Energie von 18kWh.
2.1.2 Die Effizienz des BEA-tricks-Elektromotors
Vorher: Benzin-Motor• Verbrauch
Stadtverkehr 6,0l / 100km Landstraße 4,0l / 100km Durchschnitt 4,8l / 100km
• Abgas-Norm EU3 (grüne Feinstaubplakette)
• CO2-Ausstoß ≈ 113g/km
Nachher: E-Motor BEA-AC25
• Verbrauch
Stadtverkehr 11kWh / 100km Landstraße 13kWh / 100km Durchschnitt 12kWh / 100km
• Abgas-Norm 100% emissionsfreier Motor **
** CO2-Ausstoß ≈ 53,1g/km bei der Stromerzeugung im Residualmix
2.1.3
Geschwindigkeit & Beschleunigung Die Reichweite eines Fahrzeuges mit implementiertem BEA-tricks - Umrüstkit bewegt sich im Stadtverkehr, je nachAkkugröße und -typ, zwischen 100 - 150km.
2.1.4 schwierige Bewertung
Beim Versuch, die Angaben zu kontollieren fällt uns auf, dass uns Grundkenntnisse fehlen, die es uns ermöglichen, die Angaben objektiv zu bewerten.
Daher beschäftigen wir uns zunächst mit den
• grundlegenden Eigenschaften von Elektroantrieben,
• Verständnis der Grundgrößen (Drehmoment, ...)
• Energiequelle Akku oder ...?
(Quelle: http://www.bea-
tricks.de/datenfakten.html)
2.2 Wichtige Kenngröße: das Drehmoment M
Das Drehmoment ist eine physikalische Größe in der klassischen Mechanik. Es kann die Rotationsgeschwindigkeit eines Körpers ändern, womit es für Drehbewegungen dieselbe Rolle wie die Kraft für die geradlinige Bewegung spielt
Die international verwendete Maßeinheit für das Drehmoment ist das Newtonmeter. Sein übliches Formelzeichen ist M (Anlehnung an die englische
Bezeichnung moment of force).
Wirkt eine Kraft F senkrecht auf einen Hebelarm der Länge r, so ergibt sich der Betrag des Drehmoments aus der Länge des Hebelarms multipliziert mit dem Betrag der Kraft:
M=F⋅r [M] = 1Nm
Bei Motoren werden oft 2 Werte für das Drehmoment angegeben: Der Bemessungswert (auch Nennwert oder Nominalwert genannt) und der Maximalwert.
Aus dem Drehmoment lässt sich die abgegebene mechanische Leistung berechnen:
P= ΔW
Δt , mit W=F⋅s (Kraft mal Weg) und v= Δs
Δt ergibt sich:
P= ΔW
Δt = Δs⋅F Δt =v⋅F mit M=F⋅r → F=M
r , v=ω⋅r und ω=2⋅π⋅n ergibt sich:
P=v⋅F= ω⋅r⋅M
r = ω⋅M=2⋅π⋅n⋅M Zusammenfassung:
P= ΔW
Δt =v⋅F P= ω⋅M=2⋅π⋅n⋅M [P] = 1Nm/s = 1W
W = Arbeit in Nm = Ws, t = Zeit in s, v = Geschwindigkeit in m/s, F = Kraft in N M = Drehmoment in Nm, ω = Winkelgeschwindigkeit in 1/s, n = Drehzahl in 1/s Achtung: Das vom Motor abgegebene Drehmoment (Motordrehmoment) ist nur dann identisch mit dem auf das Rad wirkende Drehmoment (Raddrehmoment), wenn kein Getrieb oder keine Kette vorhanden ist und der Motor direkt auf die Radachse wirkt (Narbenmotor).
2.2.1 Beispiel Drehmoment Bergauffahrt
Fährt man mit 25km/h auf seinem Fahrrad oder E-Bike in der Ebene, dann muss am Hinterrad ein Drehmoment von ca. 10Nm aufgebracht werden.
Fährt man mit 8km/h auf seinem Fahrrad oder E-Bike einen Berg mit 10% Steigung nach oben, dann muss am Hinterrad ein Drehmoment von ca. 37,5Nm aufgebracht werden.
Abschätzung der Kraft, die man auf das Pedal ausüben muss:
Annahmen:
- 1:1-Übersetzung (vorne und hinten an der Kette gleiche Zähnezahl) - Pedal steht gerade waagerecht
Tretkurbel-Länge r = 0,175m
r F M
r
v ω
Dies entspricht der Kraft, die eine Masse von m=F
g= 214N
9,81N/kg=22kg ausüben würde!
Wenn man nun berücksichtigt, dass das aufzubringende Drehmoment ein Mittelwert ist und man in der angenommenen Pedalstellung die maximale Kraft ausübt, so wird deutlich, dass diese Bergfahrt ganz schön anstrengend ist!
(Im Kapitel 2.2.3 Auftretende Drehmomente beim Fahrrad , Seite 16 kommen wir noch einmal auf das Problem zurück)
2.2.2 Kette als Drehmomentwandler beim E-Bike mit Mittelantrieb
Laut Datenblatt erbringt ein E-Bike-Motor für Hinterradantrieb ein viel größeres Drehmoment als ein Motor für Mittelantrieb. Warum muss das so sein?
Beispiel: Ritzel am Hinterrad 32 Zähne, Antriebsritzel des Motors 9 Zähne Man erhält also eine Untersetzung von 9
32=0,281
Wenn das Drehmoment des Hinterrad-Motors 7Nm beträgt, muss das eines vergleichbaren Mittelantrieb-Motors nur 7Nm⋅9
32=1,97Nm betragen. Dafür dreht sich der Mittelmotor aber auch viel schneller nMittelantrieb=32
9⋅nHinterrad . Die Leistung P=2⋅π⋅n⋅M ist in beiden Fällen gleich.
Ritzel am Hinterrad
Kettenblatt mit Tretkurbel
Kettenspannrolle Antriebsritzel
Motor
Pedal
Kraftsensor
an der
Tretachse
Kette
2.2.3 Auftretende Drehmomente beim Fahrrad
Bei Berechnungen am Fahrrad wird von Leistungen zwischen 80W und 200W mit mittlerem (konstanten) Drehmoment ausgegangen. Dies ist jedoch eine Vereinfachung!
Die vom Radfahrer erzeugte Leistung besteht aus der relativ konstanten Drehzahl und dem aufgrund der Kurbeltriebskinematik stark schwankenden Drehmoment. Messungen
ergaben bei verschiedenen Antriebsleistungen Drehzahlschwankungen von ca. 5% und Drehmomentschwankungen bis über 90% pro Kurbelumdrehung. Die Tabelle zeigt die Messergebnisse bei verschiedenen Leistungen.
Bild 1 zeigt den typischen
Leistungsverlauf über eine Umdrehung der Antriebswelle.
(Quelle : Rohloff, http://www.rohloff.de/no_cache/de/technik/speedhub/wirkungsgradmessung/index.html?
sword_list[0]=torq&sword_list[1]=arm)
2.2.4 Messung des Drehmoments und Regelung der Motorleistung beim Pedelec
Bringt der Benutzer durch Pedalieren Kräfte über die Kette auf den Antrieb ein, bewirkt dies eine elastische Durchbiegung der Hinterradachse. Die vom Fahrer eingebrachten Kräfte werden kontinuierlich durch Dehnmessstreifen, die auf der Hinterradachse sitzen,
gemessen. Das System reagiert je nach eingebrachter Kraft und regelt die Motorleistung je nach eingestellter Unterstützungsstufe.
(Quelle: KTM Bike Industries http://www.bikipedia.de/wp-content/uploads/downloads/ANTRIEBSSYSTEM_BIONX.pdf)
Fahrleistung und Drehzahl 100 W, 75 min-1 300 W, 75 min-1 575 W, 50 min-1
Drehmomentmaximum 21,6 Nm 68 Nm 200 Nm
Drehmomentminimum 3,8 Nm 8 Nm 20 Nm
2.3 Aufgabe: Vergleich Energiespeicher Akku und Diesel
Energiedichten: Diesel: 11,8 kWh/kg (Dichte Diesel: 0,85 kg/Liter) Strom aus Li-Ionen-Akkus: 0,13 kWh/kg
durchschnittliche Wirkungsgrade : Dieselmotor mit Getriebe: 23,5 % Elektromotor mit Elektronik: 95 % Entladewirkungsgrad Akku: 95 %
Für 500 km Fahrstrecke benötigt ein Diesel- bzw. Elektro- KFZ ca. 63 kWh Antriebsenergie.
1. Berechnen Sie die Massen der benötigten Energiespeicher Dieseltank und Li-Ionen-Akku.
2. Welche Anforderungen (5 Stichpunkte) werden an Akkumulatoren in Fahrzeugen gestellt?
3. Nennen Sie mindestens 2 Vorteile von Li-ION-Akkus gegenüber älteren Akkuarten.
4. Nennen Sie mindestens 2 Probleme bei Li-ION-Akkus.
Nehmen wir an, der Tankvorgang von 80 Liter Diesel dauert 3 min. und eine elektrische Schukosteckdose (230 V) kann maximal 16 A liefern (wegen der Sicherung).
5. Berechnen Sie die Energiemenge WTank, die in einem 80 L-Tank gespeichert ist und die Energiemenge WNutz, die davon zur Fortbewegung verwendet wird.
6. Ermitteln Sie den Energiestrom beim Diesel-Tanken in kWh pro Stunde.
Diese entspricht der „Anschlussleistung“ des Tankrüssels.
7. Ermitteln Sie, welche Energiemenge Welekt im Akku gespeichert werden muss, damit ein Elektrofahrzeug die gleiche Energiemenge Wnutz wie in 2.3 zur Fortbewegung nutzen kann. (Annahme: beide Autos benötigen die gleiche Antriebskraft)
8. Berechnen Sie die Anschlussleistung, die ein elektrisches Ladesystem haben müsste, damit der elektrische Ladevorgang genauso schnell (3 min) wie der Dieselladevorgang vonstatten gehen könnte.
9. Ermitteln Sie die Anzahl an Schukosteckdosen, die eine solche elektrische Anschlussleistung zur Verfügung stellen würde.
Haushalt-Drehstrom-Anschlüsse arbeiten mit 400 V / 16 A, Baukrananschlüsse mit 400 V / 32 A oder 400 V / 63 A. In Elektroauto-Prospekten wird oft eine Schnellladezeit (0 % bis 80 % der max.
Akkukapazität) angegeben.
Wie wir kurz vor den Sommerferien noch erfahren werden, muss man bei Drehstrom mit der folgenden Formel rechnen:
P
=√ 3⋅U
⋅I cosϕ mitcos
ϕ =1
U = 400 V liegen zwischen allen 3 Zuleitungen. Da die 3 Wechselspannungen zeitlich verschoben sind, erhält man den Faktor
√ 3
. Bei Wechselspannung kommen zusätzliche „Verluste“ hinzu, die mitcos
ϕ berücksichtigt werden, diese bleiben hier unberücksichtigt.10. Ermitteln Sie die Schnellladezeiten für die 3 verfügbaren Drehstromanschlüsse.
Zum Vergleich: aktuelle Elektrofahrzeuge haben lediglich eine Akkukapazität 20 kWh und können z.B. über spezielle 125 A-Gleichstrom-Ladestationen, die 50 kW leisten, in 30 min schnell geladen werden.
2.4 Aufgabe: Akku in einem Pedelec
Dem Datenblatt eines Antriebssystems werden folgende Daten entnommen:
Akku: 48 V / 6,6 Ah / 317 Wh, Zellenzahl 39, Zellenspannung: 3,7 V, ηEntladung = 0,9
Motor: Pab-max = 250 W Radumfang: 2 m
1. Geben Sie an, wie die Akkuzellen verschaltet sind (Skizze).
2. Ermitteln Sie die maximale Ladungsmenge, die eine Zelle aufnehmen kann.
(Diese Angabe ist z.B. wichtig, wenn man eine defekte Zelle austauschen will.)
3. Die Fortbewegung auf der Ebene mit 25 km/h benötigt ein durchschnittliches Drehmoment von 10 Nm. Sie stellen Ihr Pedelec auf die Unterstützungsstufe 2, dies beutet bei diesem Modell, dass der Motor 43 % der Antriebsleistung übernimmt.
Berechnen Sie die zu erwartende Reichweite bei voll geladenem Akku.
ηMotor = 0,92
Der Gegenwind bläst Ihnen mit ca. 20 km/h(Windstärke 3,5) entgegen. Daher erhöht sich das aufzubringende Drehmoment auf 21,6 Nm. Sie schalten auf Unterstützungsstufe 4 (Motor ca.
66,7 %), dabei müssen Sie wie bei 2.4 ca. 125 W treten, werden trotzdem langsamer und der Motor bringt seine maximale mechanische Abgabeleistung von 250 W auf.
4. Ermitteln Sie die Fahrgeschwindigkeit.
5. Berechnen Sie die nun zu erwartende Reichweite bei voll geladenem Akku.
Alternativ wird ein anderer Akku verwendet, im Datenblatt findet man folgende Angaben:
Akku: 48 V / 8,8 Ah , Zellenzahl 52, Zellenspannung: 3,7 V, ηEntladung = 0,9
Im Prospekt wird eine Reichweite von 105 km angegeben.
6. Ermitteln Sie, für welche prozentuale Motorunterstützung die Reichweitenangabe gilt.
Gehen Sie von einem erforderlichen Drehmoment von 10 Nm bei v = 25 km/h aus.
Der Akku kostet 600 € und kann 1200 mal aufgeladen werden. Eine Energiemenge von 320 Wh ermöglicht 70 km Fahrtstrecke. Die Lade- und Entladewirkungsgrade betragen 90 %. Eine kWh aus dem Stromnetz kostet 25 Cent.
7. Berechnen Sie die entstehenden Kosten (Akku + Strom) pro 100 km für eine
Akkulebensdauer unter der Annahme, dass der Akku immer nach 70 km wieder ganz aufgeladen werden muss.
8. Vergleichen Sie die Kosten mit den reinen Verbrauchskosten eines PKW mit 6 L /100 km und 1,50 € / L.
2.5 Lösung zu 2.3 Aufgabe: Vergleich Energiespeicher Akku und Diesel
1.
m
Diesel=63 kWh
0,235⋅ 11,8 kWh/ Kg
=22,7 Kg
m
Diesel=63 kWh
0,95
⋅0,95⋅0,13 kWh/ Kg
=537 Kg
2. Anforderungen (mind. 5 ) an Akkumulatoren in Fahrzeugen:
◦ hohe Energiedichte zur Ermöglichung großer Reichweiten
◦ hohes Leistungsvermögen zur Anpassung an unterschiedliche Fahrgeschwindigkeiten
◦ guter Ladewirkungsgrad, möglichst verbunden mit einer Schnellladefähigkeit
◦ ausreichende mechanische Stabilität
◦ Belastbarkeit bezüglich hoher und tiefer Temperaturen
◦ lange Lebensdauer
3. Mind. 2 Vorteile von Li-ION-Akkus gegenüber älteren Akkuarten.
◦ kein Memory Effekt
◦ keine Verwendung toxischer Substanzen
◦ kleiner und leichter wie vergleichbare Ni-MH Zellen
◦ derzeit bis zu 1000 Ladezyklen
◦ Verwendung preislich unkritischer Rohstoffe 4. Mindestens 2 Probleme bei Li-ION-Akkus:
◦ extreme Empfindlichkeit gegenüber Überladung,
◦ mögliche Selbstzündung bei zu starker/schneller Entladung/Ladung
◦ empfindlich gegenüber Tiefentladung,
◦ momentan noch zu teuer 5.
W
Tank =80 L⋅0,85 Kg
L
⋅11,8 kWh
Kg
=802,4 kWh W
Nutz=802,4 kWh
⋅0,235=188,6 kWh
6.
P
Rüssel=802,4 kWh
3 min
=802,4 kWh
3
/60 h =16,05 MW
7.W
elektr =W
Nutzη =
188,6 kWh
0,95
⋅0,95 =209 kWh
8.P
elektr=209 kWh
3
/60 h =4,18 MW
9.
P
Schuko=230 V
⋅16 A
=3,68 kW Anzahl
Schuko=4,18 MW
3,68 kW
=1136 Stück
10.W
80=209 kWh
⋅0,8
=167,2 kWh
P
Drehstrom−Haushalt =√ 3⋅ 400 V
⋅16 A=11,09 kW
→t
=167,2 kWh
11,09 kW
=15,1 h
P
Drehstrom−Baukran 1=√ 3
⋅400 V
⋅32 A=22,17 kW
→t
=167,2 kWh
22,17 kW
=7,54 h P
Drehstrom−Baukran 2=√ 3
⋅400 V
⋅63 A=43,65 kW
→t
=167,2 kWh 43,65 kW
=3,83 h
2.6 Lösung zu 2.4 Aufgabe: Akku in einem Pedelec
1.
Reihenschaltung
proStrang=48 V
3,7 V
=13 Stück Parallelstränge
=39 13
=3
2.Q
1Zelle=6,6 Ah
39
=169mAh
3.P
=2
⋅π ⋅n⋅M=2⋅ π⋅ v
U
⋅M
=2⋅ π⋅ 25 1000 m
/3600 s
2 m
⋅10 Nm
=218,2 W P
Motor−mech=218,2 W⋅ 0,43
=93,8 W P
Motor−elektr=93,8 W
0,92
=101,96 W W
Akku−ab=317 Wh⋅ 0,9
=285,3 Wh
Fahrzeit:
t
=W
Akku−abP
Motor−elektr =285,3 Wh
101,96 W
=2,8 h
Reichweite:s
=v⋅ t
=25 km
/h⋅2,8 h
=70 km
4.P
=2
⋅π ⋅v
U
⋅M
→v
=P⋅ U
2⋅π ⋅M
= (125 W+250 W
)⋅2 m2⋅ π⋅21,6 Nm
=5,53 m
s
=19,9 km h
5.P
Motor−elektr=250 W
0,92
=271,7 W t
=W
Akku−abP
Motor−elektr =285,3 Wh
271,7 W
=1,05 h
Reichweite:s
=v⋅ t
=19,9 km
/h⋅1,05 h
=21 km
6.
t
=s
v
=105 km
25 km/ h
=4,2 h P
Motor−elektr=W
Akku−abt
=48 V
⋅8,8 Ah⋅ 0,9
4,2 h
=90,5 W P
Motor−mech=90,5 W
⋅0,92
=83,2 W P
mech−25 km/h=218,2 W
siehe 3.Motorunterstützung
=83,2 W
218,2 W
⋅100% =38,1
%P
Mensch=218,2 W
−83,2 W
=135 W
7. Umgerechnete Akkukosten:
600 €
1200⋅ 70 km
=0,00714 €
km
=0,714 € 100 km
Stromkosten:0,32 kWh
0,9
⋅0,9⋅70 km⋅0,25€
kWh
=0,00141 €
km
=0,141 € 100 km
Gesamtkosten: 86 Cent pro 100 km8. Verbrauchskosten: 9 € pro 100 km. Zehnmal soviel die die Pedelec-Kosten inkl. Akku!
3 Funktionsprinzip Gleichstrom-Motor 3.1 Magnetfeldlinien
Feldlinien zeigen die Richtung des Magnetfeldes an. Ein kleiner (Elementar-) Magnet oder ein Kompass, der sich in einem Magnetfeld befindet, richtet sich in Richtung der Feldlinien aus.
Die Feldlinien sind gedachte Linien.
3.2 Durchflutungsgesetz
Ein elektrischer Strom erzeugt ein Magnetfeld dessen Feldlinien ringförmig um den Leiter verlaufen.
Daher richten sich die Magnetnadeln oberhalb und unterhalb des Leiters in unterschiedliche Richtungen aus.
3.3 Kraftwirkung auf stromdurchflossenen Leiter im Magnetfeld
Wenn man einen stromdurchflossenen Leiter in ein Magnetfeld bringt, dann wechselwirken die beiden Magnetfelder miteinander.
Dadurch wirkt eine Kraft auf den stromdurchflossenen Leiter.
Richtung der Kraftwirkung (3-Finger-Regel rechte Hand) Ursache Strom (Daumen nach hinten)
Vermittlung Magnetfeld (Zeigefinger nach unten) Wirkung Kraft (Mittelfinger nach links)
Kennzeichnung der Stromrichtung Kreuz: Strom fließt nach hinten
(Merkregel: Pfeilende) Punkt: Strom fließt nach vorne
(Merkregel: Pfeilspitze)
Weitere Anwendung: Der Elektronenstrahl in einer Bildröhre, der das Bild auf die Mattscheibe zeichnet, wird durch Elektromagnete abgelenkt. (z.B. in einer alten Fernsehröhre)
(C) der Bilder: Dieter Welz, Ulm, http://www.zum.de/dwu/umapem.htm Strom I
Magnetfeld
Leitung Kompass
StromI Kraft F
N
S
Ursache Strom
Vermittlung Magnetfeld Wirkung
Kraft
Rechte Handregel:
Daumen zeigt in Stromrichtung Finger zeigen im Magnetfeldrichtung
3.4 Stromdurchflossener Rotor (Leiterschleife) im Magnetfeld
Das linke Bild zeigt, dass ein einzelner stromdurchflossener Leiter im
Magnetfeld abgelenkt wird.
Im rechten Bild sieht man eine
Leiterschleife, deswegen fließt in dem einen Leiter der Strom nach hinten und in dem anderen nach vorne.
Die Kräfte erzeugen ein Drehmoment in der Drehachse der Leiterschleife.
• Je stärker das äußeres Magnetfeld (durch Nord und Südpol) ist, desto größer ist die Kraft. [
• Je größer der Strom ist, desto stärker ist das Magnetfeld um den Leiter. Desto größer ist die Kraft.
• Wenn man nicht nur eine Leiterschleife nimmt sondern viele (z.B. 50), dann hat man eine Spule. Damit die 50fache Kraftwirkung!!!!
Das Bild zeigt warum sich ein Motor dreht:
• Die äußeren Magnete ( Nord- und Südpol). werden Stator (=dreht sich nicht) genannt.
• Die Leiterschleife (Spule) wird Rotor oder Anker genannt.
• Der Rotor oder Anker ist der bewegliche Teil im Motor, kommt von Rotieren.
• Permanent erregte Motoren haben als äußere Magnete Permanentmagnete.
• Es gibt auch Motoren bei denen dieses Magnetfeld durch Spulen erzeugt wird.
Um eine 360°-Drehung zu erhalten, ist ein Stromwender (Kommutator) notwendig.
Funktionsprinzip
N
S F
N
S F
l F M
M
Kraft F Drehmoment M
3.5 Kommutierung 3.5.1 Aufbau
Damit der Motor sich um 360° dreht, ist eine Umpolung des Stromes im Anker notwendig.
Die Umpolung übernimmt der so genannte Kommutator (Polwender).
Dieser besteht aus Schleifringen, die mit dem Anker verbunden sind, und Kohlebürsten, die von außen an die Schleifringe gepresst werden.
3.5.2 Erklärungen der einzelnen Phasen
1) Strom fließt von a nach ba stößt sich von S ab b stößt sich von N ab 2) zusätzlich sieht man:
a wird von N angezogen b wird von S angezogen
3) Wenn "nicht gleich" eine Umpolung der Stromrichtung erfolgt, bleibt der Anker stehen!
4) Die Umpolung des Stromes durch den Polwender hat zur Folge, dass der Strom nun von b nach a fließt.
a stößt sich von N ab b stößt sich von S ab.
5) zusätzlich sieht man:
a wird von S angezogen b wird von N angezogen
6) "gleich" ist eine erneute Umpolung erforderlich.
Vorgang beginn von Vorne bei 1)
3.5.3 Elektronische Kommutierung
Man versucht moderne Motoren und
Generatoren ohne diese Bürsten aufzubauen:
Englisch: brushless DC – Motor
Deutsch: Bürstenloser Gleichstrom Motor Wie bekommt man es "bürstenlos" hin?
Der sich drehende Anker muss ein
Permanentmagnet sein, das äußere Magnetfeld wird durch Spulen erzeugt, dessen Polung zum richtigen Zeitpunkt geändert wird.
Technisch: Transistoren schalten die Richtung des Stroms um, der durch die Spulen fließt.
Solche Motoren nennen sich elektronisch Kommutiert, Abkürzung : EC-Motor
(C) der Bilder: Dieter Welz, Ulm,
http://www.zum.de/dwu/depotan/apem105.htm Screenshots der Animation
"Gleichstrom-Elektromotor)
Schleifringe Bürsten
1
2
3
4
6 5
a b
a
a
a b
b
b
b
b a
a
3.6 Pedelec-Motor für Hinterradnarbe (Bionx)
3.6.1 Firmen-Beschreibung
• bürstenloser Gleichstrom-Hinterradnabenmotor ohne Getriebe
• Rückladebetrieb (Rekuperation) vorgesehen
• Leistung nominal 250 Watt
• Drehmoment nominal 9 Nm / maximal 40 Nm in die Hinterradachse integrierte Kraftmesssensorik
• Gewichtsoptimiert durch doppelte Anzahl der Pole, doppelte Anzahl Magneten, Verringerung des Luftspalts, weniger Eisen im Stator, weniger Kupferdraht im Stator weniger Widerstand (Anmerkung: Vergleich mit dem Vorgängermodell)
• Gewicht 3,5kg
3.6.2 Eigene Ergänzungen
• Die äußeren Permanentmagnete drehen sich und sind fest mit den Speichen des Rades verbunden
• Die Spulen in der Mitte mit der Elektronik stehen fest.
• Die schwarzen elektronischen Teile auf der Platine sind Transistoren, die als elektronische Schalter verwendet werden. Sie lassen zum richtigen Zeitpunkt Strom durch die Spulen fließen. Dies nennt sich elektronisch kommutieren.
• Es gibt weniger Transistoren als Spulen, daraus schließen wir, dass ein Transistor immer mehrere Spulen gleichzeitig schaltet.
N +
- S
Position?
Position?
Position?
Steuerung
Bürstenloser Motor:
Permanent-Magnete drehen sich, Magnetfeld-Sensoren messen, in welcher Stellung sich der Rotor gerade befindet. Transistoren schalten in Abhängigkeit von der Stellung des Rotors die Stromrichtung durch die Spulen um.
3.7 Pedelec-Motor für Tretlagerantrieb (Panasonic)
3.7.1 Firmen- Beschreibung
• Antriebseinheit und Steuerung als 3-in-1-Konstruktion (Motor, Controller
& Kraftsensor)
• sehr geringe elektromagnetische Belastung
• Gewicht der Antriebseinheit 3,8kg
• bürstenloser Motor
• Innenlager mit Kraftsensor
• Getriebe mit Antriebsritzel
(Quelle: Kalkhoff Bikes, Derby Cycle Werke GmbH, Siemensstr. 1-3, 49661 Cloppenburg )
Ritzel am Hinterrad
Kettenblatt mit Tretkurbel
Kettenspannrolle Antriebsritzel
Motor
Pedal
Kraftsensor
an der
Tretachse
Kette
3.8 Pedelec-Motor mit innenliegendem Rotor
(c) Kalkhoff Bikes, Derby Cycle Werke GmbH, Siemensstr. 1-3, 49661 Cloppenburg
3.9 Induktionsgesetz
Das Durchflutungsgesetz sagt aus, dass ein elektrischer Strom ein Magnetfeld erzeugt. Dies ist die Grundlage zur Erklärung des Funktionsprinzips eines Motors.
Ein Motor wandelt elektrische Energie in mechanische Energie um.
Das Prinzip funktioniert auch umgekehrt: Dreht man die Welle eines Motors, so erzeugt dieser eine elektrische Spannung: Man betreibt ihn als Generator, der mechanische Energie in elektrische Energie umwandelt. Dieses Prinzip wird beschrieben mit dem Induktionsgesetz.
Eine Leiterschleife oder Spule ist einem Magnetfeld ausgesetzt, das durch Permanent- Magnete oder durch stromdurchflossene Spulen erzeugt wird.
Ändert man die Stärke des Magnetfeldes B oder die Größe der Fläche A der Leiterschleife, die dem Magnetfeld ausgesetzt ist, so ist an den Anschlüssen der Leiterschleife eine Spannung messbar. Man sagt: Es wird eine Spannung induziert.
Wichtig ist: B oder A muss sich ändern.
Uinduziert=NΔ Φ
Δt mit Φ=B⋅A
Die Größe der induzierten Spannung ist abhängig von:
der Windungszahl N der Spule, der Größe der Fläche A, der Schnelligkeit der Änderung.
M
I U
Durchflutungsgesetz
→ Erklärung Motor
G
I U Induktionsgesetz
→ Erklärung Generator
N
S t S N
Bewegung
Magnetfeld B ändert sich
U U
I klein
U
t
I gross
U
Magnetfeld B ändert sich
Magnetfeld B ändert sich
t Bewegung
durchstömte Fläche A ändert sich
N S
U
N S
U
t Drehung
durchstömte Fläche A ändert sich
N S
U
N S
vom Magnetfeld U durchströmte Fläche A
ändert sich
3.10 Motorersatzschaltbild
Wir haben gesehen, dass ein Motor auch als Generator betrieben werden kann und
demzufolge eine Spannung induziert, wenn er sich dreht.
Dieses Phänomen existiert auch im Motorbetrieb.
Der von außen angelegten Klemmenspannung setzt der Motor eine "selbst erzeugte"
Induktionsspannung entgegen.
Diese elektrischen Eigenschaften lassen sich mit dem nebenstehenden Ersatzschaltbild
beschreiben.
Der Draht der Ankerspule hat einen elektrischen
Widerstand RAnker. Wenn der Motor steht, wird die Größe des Stromes IKlemme nur durch diesen sehr kleinen Widerstand bestimmt. Der sogenannte Anlaufstrom des Motors ist daher sehr gross.
Beispiel: UKlemme=25V , RAnker=1Ω Uinduziert=0V → UKlemme=UR I=UR
R =25V 1Ω=25A
Wenn der Motor sich dreht (Drehzahl n>0) wird eine Spannung Uinduziert induziert, die proportional mit der Drehzahl n steigt:
Grund: Je größer die Drehzahl n, desto schneller ändert sich die vom Magnetfeld durchsetzte Fläche A im Anker, desto größer ist die induzierte Spannung.
Durch die induzierte Spannung sinkt der fließende Strom IKlemme. Beispiel: bei Uinduziert=10V :
I=UR
R =UKlemme−Uinduziert
R =25V−10V
1Ω =15A
bei Uinduziert=20V : I=UR
R =UKlemme−Uinduziert
R =25V−20V
1Ω =5A
M
IKlemme
UKlemme
RAnker
UKlemme Uinduziert ~ n
IKlemme
UR
4 Berechnungen und Messungen zum Motor im E-Bike, Pedelec 4.1 Versuchsaufbau Messungen an der Gleichstrommaschine
1 Wirbelstrombremse 2 Bremsmagnet
3 Drehmomentmessung 4 Drehzahlmessung 5 Gleichstrommaschine 6 Spannungsmessung 7 Strommessung 8 Netzteil
9 Reflexmarke
4.1.1 Bauteile
• Faulhaber DC-Kleinstmotor 3557K 020 CS
• RillenkugellagerFAG 61807
• Aeronaut Spannkonus 4 mm Welle / 8 mm Schaft
• Scheibe Platinenmaterial 1,5 mm Epoxidharz mit 35 µm Cu
• optischer Drehzahlmesser
• Federkraftmesser
4 3
1
2 5
6 7
4 8
9
Klemmenspannung einstellen (U = 0 ..12V in 1V-Schritten).
Warten bis Drehzahl sich stabilisiert hat. Man erkennt dies daran, dass die Stromaufnahme sich nicht mehr verändert.
Leerlaufdrehzahl messen.
U in V n in 1/min n in 1/s
0 0,0 0,00
1 186,6 3,11
2 425,0 7,08
3 665,0 11,08
4 906,0 15,10
5 1165,0 19,42
6 1400,0 23,33
7 1630,0 27,17
8 1843,0 30,72
9 2087,0 34,78
10 2311,0 38,52
11 2540,0 42,33
12 2770,0 46,17
Folgerung
Tendliniengleichung abgelesen: f(x) = 233,7 -23,2n Drehzahl N = Kn * U
U Klemmenspannung
Kn Drehzahlkonstante Kn = N / U = 234 (Steigung)
0 2 4 6 8 10 12
0,0 500,0 1000,0 1500,0 2000,0 2500,0 3000,0
f(x) = 233,7x - 23,2
Leerlaufdrehzahl in Abhängigkeit von der Klemmenspannung
U in V
n in min-1
Klemmenspannung einstellen (U = 12 V) und konstant halten.
Lastmoment mit Bremsmagnet einstellen (M = 0 Ncm bis 3,5Ncm in 0,5Ncm-Schritten) und an Drehmoment-Messhebel messen.
Klemmenstrom messen.
M in Ncm I in A
0,5 0,1
1 0,3
1,5 0,4
2 0,5
2,5 0,6
3 0,8
3,5 0,9
Folgerung
Tendliniengleichung: f(x) = 0,257xI Klemmenstrom
M in Ncm Drehmoment
Ki Stromkonstante Ki = I / M = 0,257 hier: (Steigung der Trendlinie aus dem Diagramm)
Auch wenn der Motor noch gar nicht über die Wirbelstrombremse gebremst wird, misst man bereits ein Moment.
Dies liegt daran, dass der Motor durch Reibung in seinen Lagern und zwischen Bürsten und Kommutator gebremst wird (Reibemoment).
0 0,5 1 1,5 2 2,5 3 3,5 4
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8
f(x) = 0,257x - 0,000
Klemmenstrom in Abhängigkeit vom Lastmoment
M in Ncm
I in A
Klemmenspannung einstellen (U = 12 V) und konstant halten.
Lastmoment mit Bremsmagnet einstellen ( M = 0Ncm bis 3,5Ncm in 0,5Ncm-Schritten) und an Drehmoment-Messhebel messen.
Drehzahl messen
Schritt 2 und 3 wiederholen bei einer Klemmenspannung U = 10V berechnete Werte mit Tendlinie Ukl = 12V Ukl = 10V Ukl = 12V Ukl = 10V Ukl = 10V M in Ncm n in min-1 n in min-1 n berechnet n berechnet
n10 / n12 = 10 / 12 → n10 = 10 / 12 * n12
0,5 2743 2292 2732 2261 2277
1 2594 2137 2611 2137 2175
1,5 2457 2000 2489 2014 2074
2 2410 1863 2367 1890 1973
2,5 2250 1750 2245 1767 1871
3 2130 1630 2124 1643 1770
3,5 1985 1560 2002 1520 1668
Steigung -244 -247
2854 2385
n berechnet mit n ~ U aus berechneten n bei 12V
Y-Achsen- abschnitt
0 0,5 1 1,5 2 2,5 3 3,5 4
0 500 1000 1500 2000 2500 3000 3500
f(x) = - 247x + 2385
f(x) = - 244x + 2854
Drehmoment-Drehzahl-Kennlinie
Ukl = 12V Linear (Ukl = 12V) Ukl = 10V Linear (Ukl = 10V)
n in min-1
4.5 Grundlegende Berechnungen aus bekannten Motordaten
Das Ziel der folgenden Berechnungen ist es, mithilfe der bekannten Nenndaten des Motors den fließenden Strom, die anzulegende Spannung, den sich ergebenden Wirkungsgrad bei allen anderen Betriebsfällen auszurechnen. (z.B. bei 25% Motorleistung in Aufg. 4.6) Dazu muss man aus den Nenndaten erst einmal den Ankerwiderstand, die induzierte Spannung , Nenndrehzahl usw. bestimmen, um anschließend in einfachen Dreisatz- Berechnungen auf die anderen Betriebsfälle schließen zu können.
Vor den Aufgaben stehen immer mögliche Aufgabenstellungen, mit denen man sich eng geführt dem Endziel nähert.
Aufgabenstellung zu 4.5
Aus dem Datenblatt eines E-Bikes entnimmt man folgende Motordaten UNenn = 36 V, PNenn = 252 W (mechanisch) , MNenn = 12 Nm, ηNenn = 82 % (wenn man die Reibverluste des Motors berücksichtigt:
Pnenn-ab = 246 W , MNenn = 11,7 Nm, ηNenn = 80 % )
Der Motor ist auf Hinterradachse montiert. Der Radumfang beträgt 2,07 m (28 Zoll-Rad) Annahme: Die mechanischen Verluste des Motors bleiben im Nennbetrieb unberücksichtigt 4.5.1 Berechnen Sie die Motordrehzahl im Nennbetrieb.
4.5.2 Mit welcher Geschwindigkeit bewegt sich der E-Bike-Fahrer?
4.5.3 Berechnen Sie die aufgenommene elektrische Leistung im Nennbetrieb.
4.5.4 Welcher Strom fließt im Nennbetrieb?
4.5.5 Berechnen Sie den Ankerwiderstand. (INenn = 8,53 A)
4.5.5 Ermitteln Sie die am Ankerwiderstand abfallende Spannung und die im Motor induzierte Spannung Uind im Nennbetrieb.
4.5.1 Nenndrehzahl
Pmech=2⋅π⋅n⋅M → nNenn= Pmech
2⋅π⋅Mnenn= 252 W
2⋅π⋅12Nm=3,342 1 s
4.5.2 zugehörige Geschwindigkeit
v=n⋅Radumfang=3,3421
s⋅2,07m=6,918m
s =6,910m s⋅3600
1000=24,9km/h
Dieser Wert wird im Nennbetrieb erreicht, wenn Reibung und Luftwiderstand ein
Drehmoment von 12 Nm erfordern (in den Kennlinien 1% Steigung) und alleine der Motor den Antrieb übernimmt.
4.5.3 Aufgenommene elektrische Leistung im Nennbetrieb
Pelektr=Pmechη =252 W
0,82 =307 W → PVerlust=Pelektr−Pab=55 W RVerlust
UKlemme Uinduziert ~ n
IKlemme
UVerlust Pzu = Pelekt
Uklemme * IKlemme
Pab = Pmech 2π * n * M Pverlust = UR * Iklemme (Wärmeverluste) Pverlust = I²Klemme * RAnker
4.5.4 Stromaufnahme
Pzu=Pelektr=UKlemme⋅IKlemme=UNenn⋅INenn → INenn=PNenn
UNenn=307 W
36 V =8,53 A
4.5.5 Verlustwiderstand
PVerlust−Nenn=PR=I ²Nenn⋅RVerlust → RVerlust=PVerlust−Nenn
I ²Nenn = 55 W
(8,53 A)²=0,75Ω
4.5.6 U
indfür weitere Berechnungen mit dem Motorersatzschaltbild
PVerlust=U ²RRVerlust → UR=
√
PVerlust⋅RVerlust=6,423 V→ Uinduziert=UKlemme−UR=36 V−6,423 V=29,58 V
4.6 Berechnung der Klemmenspannung für 50 % Motorunterstützung Aufgabenstellungen zu 4.6:
Nun soll untersucht werden, wie sich Strom, Spannung und Leistung ändern, wenn der Motor nur noch die Hälfte des in der Radachse wirkenden Drehmoments aufbringen muss, das restliche Drehmoment bringt der Fahrer auf. Die Geschwindigkeit bleibt unverändert.
Aus der vorhergehenden Aufgabe sind die Werte im Nennbetrieb übernommen:
MNenn = 12 Nm, INenn = 8,53 A, nNenn=3,3421
s , Uind_Nenn = 29,6 V, (v = 24,9 km/h), Der Verlustwiderstand im Motorersatzschaltbild beträgt: RVerlust = 0,75 Ω
4.6.1 Ermitteln Sie den im Motor fließenden Strom, damit dieser das erforderliche Drehmoment aufbringen kann.
4.6.2 Berechnen Sie die Spannung, die von der Elektronik an den Motor angelegt wird.
4.6.3 Ermitteln Sie, auf welchen Wert sich der Wirkungsgrad geändert hat.
4.6.5 Ergänzung: Die Elektronik erzeugt die Motor-Klemmenspannung durch ein PWM- Signal mit dem Maximalwert 36 V. Ermitteln Sie den notwendigen Tastgrad des PWM-Signals wenn der Effektivwert der Spannung 29,6 V betragen soll.
Vorüberlegungen
MMotor = 50 % • MNenn; MFahrer = 50 % • MNenn
Wegen P=2•π•n•M gelten die %-Werte auch für P.
Folgende Gesetzmäßigkeiten werden zur Berechnung benötigt:
M
I = konst1 Uinduziert
n = konst2 Was bleibt gleich?
• RVerlust und die Drehzahl n ändert sich nicht (gleiche Geschwindigkeit)
• weil Uinduziert / n konstant ist, ändert sich auch Uinduziert nicht!
Wie ändert sich die n(M)-Kennlinie?
• Steigung bleibt gleich
UKlemme = Unenn UKlemme < Unenn n
n25km/h