Beispiele Beispiel 1: Drehung
Gegeben sei
M = 1 4
− 2 3 √ 3 0 − 2 2 √
3 2 √
3 √
3 1
.
a) Zeigen Sie, dass M eine orthogonale Matrix ist.
b) Zeigen Sie: Die zu M geh¨ orende Abbildung ϕ : R
3→ R
3ist eine Drehung.
c) Geben Sie Drehachse und Drehwinkel mit Drehrichtung an.
d) Man gebe eine Basistransformation mit ei- ner orthogonalen Matrix S an, so dass
Dr = SM S
−1=
1 0 0
0 cos α sin α 0 − sin α cos α
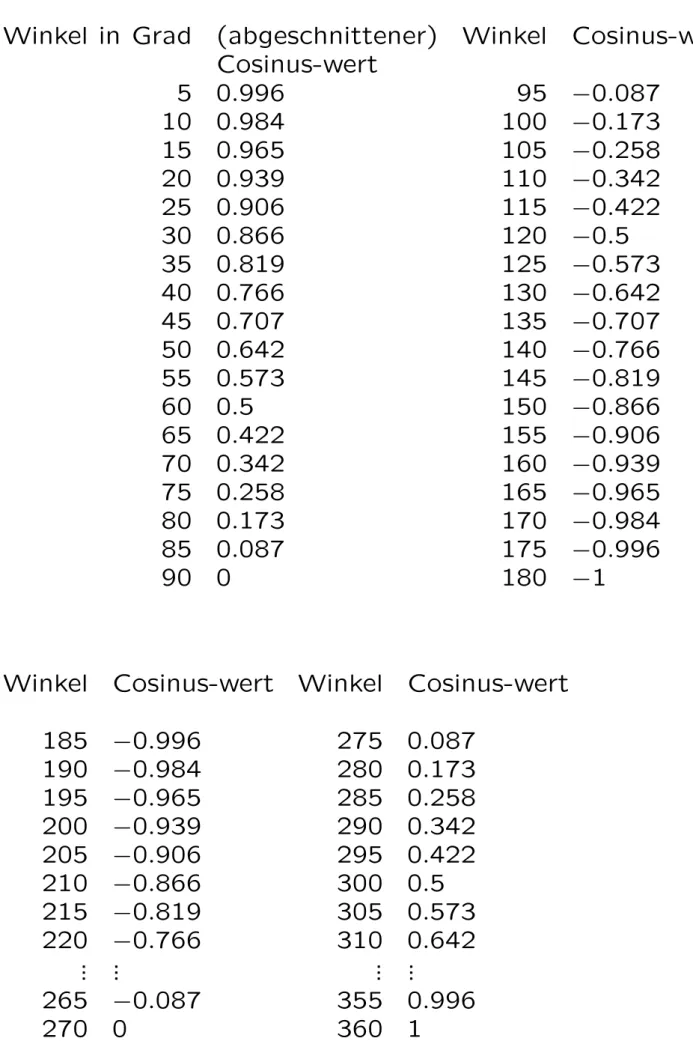
Tabelle von Cosinuswerten
Winkel in Grad (abgeschnittener) Cosinus-wert
5 0.996 10 0.984 15 0.965 20 0.939 25 0.906 30 0.866 35 0.819 40 0.766 45 0.707 50 0.642 55 0.573 60 0.5 65 0.422 70 0.342 75 0.258 80 0.173 85 0.087 90 0
Winkel Cosinus-wert 95 −0.087
100 −0.173 105 −0.258 110 −0.342 115 −0.422 120 −0.5 125 −0.573 130 −0.642 135 −0.707 140 −0.766 145 −0.819 150 −0.866 155 −0.906 160 −0.939 165 −0.965 170 −0.984 175 −0.996 180 −1
Winkel Cosinus-wert 185 −0.996
190 −0.984 195 −0.965 200 −0.939 205 −0.906 210 −0.866 215 −0.819 220 −0.766
... ...
265 −0.087 270 0
Winkel Cosinus-wert 275 0.087
280 0.173 285 0.258 290 0.342 295 0.422 300 0.5 305 0.573 310 0.642
... ...
355 0.996 360 1
Beispiel 2: Potenzen von Matrizen
Gegeben sei eine Matrix A. Man gebe ein Ver- fahren an, um effizient A
100zu berechnen.
A
100= A · A · A · · · A ist zu aufwendig, und anf¨ allig f¨ ur Rundungsfehler.
Man definiere e
Abzw.
exp(A) =
X∞
k=0
A
kk! . Man berechne dies f¨ ur A = 1 1
0 1
!