Zusammenfassung Analysis 3
Patrik Rohner, rohnerpa@student.ethz.ch 9. Januar 2009
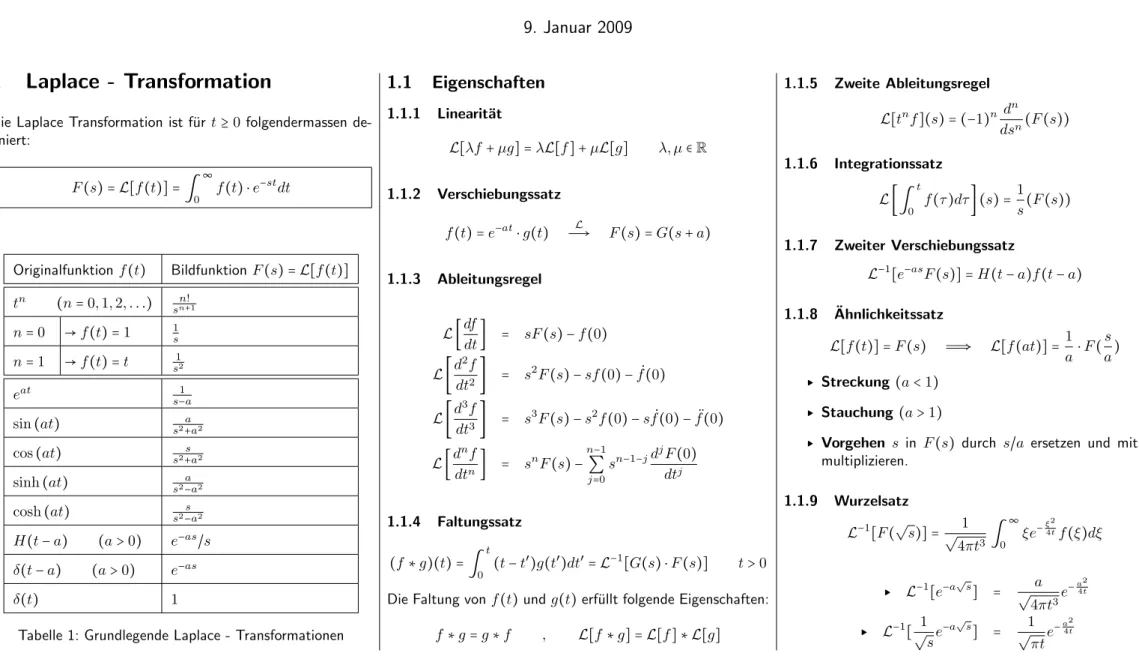
1 Laplace - Transformation
Die Laplace Transformation ist f¨ ur t ≥ 0 folgendermassen de- finiert:
F (s) = L[f (t )] = ∫
∞ 0
f (t) ⋅ e − st dt
Originalfunktion f (t) Bildfunktion F (s) = L[f (t)]
t n (n = 0, 1, 2, . . .) s
n+1n!
n = 0 → f (t) = 1 1 s n = 1 → f (t) = t s 1
2e at s − 1 a
sin (at) s
2+ a a
2cos (at) s
2+ s a
2sinh(at) s
2− a a
2cosh (at) s
2− s a
2H(t − a) (a > 0) e − as /s δ(t − a) (a > 0) e − as
δ(t) 1
Tabelle 1: Grundlegende Laplace - Transformationen
1.1 Eigenschaften
1.1.1 Linearit¨ at
L[λf + µg] = λL[f ] + µL[g] λ, µ ∈ R 1.1.2 Verschiebungssatz
f (t) = e − at ⋅ g(t) Ð→ L F (s) = G(s + a) 1.1.3 Ableitungsregel
L [ df
dt ] = sF(s) − f (0) L [
d 2 f
dt 2 ] = s 2 F (s) − sf (0) − f ˙ (0) L [
d 3 f
dt 3 ] = s 3 F (s) − s 2 f (0) − s f ˙ (0) − f ¨ (0) L [
d n f
dt n ] = s n F(s) −
n − 1
∑
j = 0
s n − 1 − j d j F (0) dt j
1.1.4 Faltungssatz
(f ∗ g)(t ) = ∫
t 0
(t − t ′ )g(t ′ )dt ′ = L − 1 [G(s) ⋅ F (s)] t > 0 Die Faltung von f (t) und g(t) erf¨ ullt folgende Eigenschaften:
f ∗ g = g ∗ f , L[f ∗ g] = L[f ] ∗ L[g]
1.1.5 Zweite Ableitungsregel
L[t n f ](s) = (−1) n d n
ds n (F (s)) 1.1.6 Integrationssatz
L [∫
t 0
f (τ )dτ ] (s) = 1 s (F(s)) 1.1.7 Zweiter Verschiebungssatz
L − 1 [e − as F(s)] = H (t − a)f (t − a) 1.1.8 Ahnlichkeitssatz ¨
L[f (t)] = F(s) Ô⇒ L[f(at)] = 1 a ⋅ F (
s a )
▸ Streckung (a < 1)
▸ Stauchung (a > 1)
▸ Vorgehen s in F (s) durch s/a ersetzen und mit 1/a multiplizieren.
1.1.9 Wurzelsatz
L − 1 [F( √
s)] = 1
√ 4πt 3 ∫
∞ 0
ξe −
ξ2 4t
f (ξ)dξ
▸ L − 1 [e − a √ s ] = a
√
4πt 3 e −
a2 4t
▸ L − 1 [ 1
√ s e − a √ s ] = 1
√ πt e −
a2 4t
Originalfunktion f (t) Bildfunktion F (s) = L[f (t)]
e
at− 1 a
1 s ( s − a )
t ⋅ e at ( s − 1 a )
2e
at− e
bta − b
1 ( s − a )( s − b )
(1 + at) ⋅ e at ( s − s a )
2a ⋅ e
at− b ⋅ e
bta − b
( s − a )( s s − b ) t
n−1⋅ e
at( n − 1 ) !
( s − 1 a )
n(n = 1, 2, 3, . . .) sin (at + b) sin ( b )⋅ s s
2+ + a a ⋅
2cos ( b )
cos (at + b) cos ( b )⋅ s s
2+ − a a ⋅
2sin ( b ) sin ( at )
t arctan( a s )
√ 1 π ⋅ t
√ 1 s
2 ⋅ √ 1 π
1 s √ s
Tabelle 2: Weitere Laplace - Transformationen
1.2 Differenzialgleichungen
(i) Laplacetransformierte der einzelnen Summenden bilden.
(Ableitungsregel verwenden)
(ii) Anfangsbedingungen einsetzen, nach F(s) aufl¨ osen.
(iii) R¨ ucktransformieren. (PBZ / Faltungssatz verwenden) 1.2.1 Das L¨ osen einer ODE mittels Laplace - Transfor-
mation
/ L¨ osen Sie die folgende ODE mittels Laplace - Transfor- mation:
dx(t)
dt + 2x(t) = t , x(0) = a
dx(t)
dt + 2x(t) = t Ð→ L sX(s) − X (0)
² = a
+2X (s) = 1 s 2 X (s) = 1
s 2 (2 + s) + a 2 + s
L
−1Ð→ x(t) = t ∗ e − 2t + a ⋅ e − 2t
Der Faltung ergibt
t ∗ e − 2t = ∫
t 0
(t − t ′ )e − 2t dt ′ = [ te − 2t
′−2 ]
t
0
− ∫
t 0
t ′
® ↓
e − 2t
′± ↑
dt ′
= [ te − 2t
′−2 ]
t
0
− [ t ′ e − 2t
′−2 ]
t
0
+ ∫
t 0
e − 2t
′−2 dt ′
= t 2 + [
e − 2t
′4 ]
t
0
= t 2 −
1 4 +
e − 2t 4 Somit ist die gesuchte Funktion
x(t) = (a + 1 4 )e − 2t +
t 2 −
1 4
/ L¨ osen Sie die folgende ODE mittels Laplace - Transfor- mation:
˙
y + y = cos(t) , y(0) = 1
˙
y + y = cos(t) Ð→ L sY (s) − y(0) + Y (s) = s s 2 + 1
Y (s) = s
(s 2 + 1)(s + 1) − 1 s + 1
Die Partialbruchzerlegung des Bruches erfolgt mit dem Ansatz f¨ ur komplex konjugierte Nullstellen, also ( s
2+ 1 s )( s + 1 ) = As s
2+ + B 1 +
C
s + 1 und liefert s = (As + B )(s + 1) + (s 2 + 1)(C). Der Koeffi- zientenvergleich f¨ uhrt auf ( s
2+ 1 s )( s + 1 ) = 1 2 s
2s + 1 + 1 2 s
21 + 1 − 1 2 s + 1 1 und somit gilt
Y (s) = 1 2
s s 2 + 1 +
1 2
1 s 2 + 1 −
3 2
1 s + 1
Die Laplace - R¨ ucktransformation liefert das gesuchte Resultat y(s) = 1
2 cos(t) + 1
2 sin(t) − 3 2 e − t
1.2.2 Das L¨ osen einer PDE mittels Laplace - Transfor- mation
/ L¨ osen Sie f¨ ur 0 ≤ x < 1 mittels Laplacetransformation in der Variablen t das folgende Anfangsrandwertproblem:
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
u tt − c 2 u xx = 0 f¨ ur x > 0, t > 0 u x (0, t) = f (t) f¨ ur t > 0 lim x →∞ u(x, t) = 0 f¨ ur t > 0 u(x, 0) = u t (x, 0) = 0 f¨ ur x > 0 , wobei f eine vorgegebene Funktion ist.
Laplacetransformation mit Ableitungregel ergibt L[u tt ] = s 2 U (x, s) − sU (x,0)
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
= 0
− U t (x, 0)
´¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¶
= 0
= s 2 U (x, s)
Somit folgt die ODE
U xx (x, s) − s 2
c 2 U (x, s) = 0 Diese hat die L¨ osung
U (x, s) = A 1 e
scx + A 2 e −
scx
Mit lim x →∞ u(x, t) = 0 ⇒ lim x →∞ U(x, s) = 0 muss A 1 = 0 sein. Aus u x (0, t) = f (t) ⇒ U x (0, s) = F (s) folgt A 2 =
− s c F (s) und somit
U (x, s) = − c
s F (s)e −
scx
Nun wenden wir die Regel L [∫ 0 t f (τ)dτ ] (s) = 1 s (F(s)) an, in diesem Fall gilt L − 1 [− c s F (s)] = −c ∫
t
0 f(τ)dτ .
Aus dem 2. Verschiebungssatz L − 1 [e − as F (s)] = H (t − a)f (t − a) ergibt die R¨ ucktransformation von e −
scx eine Ver- schiebung im Argument. Die L¨ osung lautet sodann
u(x, t) = H (t − x
c ) ⋅ (−c ∫
t −
xc0
f (τ )dτ )
2 Fourier - Reihen
2.1 Multiple Choice Fragen # 1
2.1.1 Periodizit¨ at
Die Funktionen sin (cx) , cos (cx) , tan (cx) , cos (πx) , e √ 2ix , e ( ix ) , sin (x)cos (x) , sin 1 ( x ) sind periodisch.
Die Funktionen sin (x 2 ) , arcsin (x) , arctan(cx) , cosh (x) , arcsin (πx) , e i √ x sind nicht periodisch.
Die Funktionen tan(x) , cos 2 (x) , sin(2x) sind π- periodisch.
Die Funktion sin(mx) ist 2π m -periodisch.
Sind f, g π-periodisch, dann auch f + g.
Ist f (x) π-periodisch, so ist sin(f(x)) ebenfalls π- periodisch.
Ist f (x) a-periodisch und g(x) b-periodisch, so ist f (g(x)) b-periodisch, g(f (x)) aber a-periodisch
1.
Ist f (x) n-periodisch und g(x) k-periodisch, n > k, so ist f(x)g(x) mindestens (kgV (n, k))-periodisch.
Ist f(x) u-periodisch und g(x) v-periodisch,, so ist f (x) + g(x) (kgV (u, v))-periodisch.
2.1.2 gerade oder ungerade?
Die Funktionen cos(ax) , cosh(ax) , sin(x 2 ) , sin(x) tan(x) , Re(e i sin ( x ) )
2sind gerade.
Die Funktionen sin(ax) , tan(ax) , sinh(ax) , tanh(ax) , sin(x)cos(x) , sinh(sin(x)) sind ungerade.
Das Produkt von 2 geraden Funktionen ist auch eine gerade Funktion.
Das Produkt von 2 ungeraden Funktionen ist eine gerade Funktion.
Das Produkt einer geraden und einer ungeraden Funkti- on ist eine gerade Funktion.
Ist f gerade, dann ist f ′ ungerade und f ′′ wieder gerade.
sin(sin(x)) → ungerade und 2π-periodisch.
sin(cos(x)) → gerade und 2π-periodisch.
cos(cos(x)) → gerade und π-periodisch.
cos(sin(x)) → gerade und π-periodisch.
tan(sin(x)) = sin cos ( ( sin sin ( ( x x )) )) → ungerade , p = 2π.
tan(cos(x)) = cos sin ( ( cos cos ( ( x x )) )) → ungerade , p = 2π.
2.2 Reelle Darstellung
2.2.1 Periodenl¨ ange p = 2π
Anstelle vom Interval -π bis π k¨ onnte man auch 0 bis 2π w¨ ahlen.
f (x) = a 0
2 +
∞
∑
n = 1
(a n cos(nx) + b n sin(nx)) a 0 =
1 π ∫
π
− π
f (x)dx a n =
1 π ∫
π
− π f (x) cos(nx)dx, (n ≥ 0) b n =
1 π ∫
π
− π
f (x) sin(nx)dx, (n ≥ 1)
▸ ungerade Funktion, a n = 0:
f (x) =
∞
∑
n = 1
b n sin(nx)
b n = 2 π
π
∫
0
f (x) sin(nx)dx (n ≥ 1)
▸ gerade Funktion, b n = 0:
f (x) = a 0
2 +
∞
∑
n = 1
a n cos(nx)
a n = 2 π
π
∫
0
f (x) cos(nx)dx (n ≥ 0)
2.2.2 Periodenl¨ ange p = L
f (x) = a 0
2 +
∞
∑
n = 1
(a n cos( 2πn
L x) + b n sin 2πn L x) a 0 =
2 L ∫
L 2
−
L2f (x)dx a n =
2 L ∫
L 2
−
L2f (x) cos( 2πn
L x)dx, (n ≥ 0) b n =
2 L ∫
L 2
−
L2f (x) sin( 2πn
L x)dx, (n ≥ 1)
▸ ungerade Funktion, a n = 0:
f (x) =
∞
∑
n = 1
b n sin( 2πn L x) b n =
4 L
L / 2
∫
0
f (x) sin( 2πnx
L )dx (n ≥ 1)
▸ gerade Funktion, b n = 0:
f (x) = a 0
2 +
∞
∑
n = 1
a n cos( 2πn L x) a n =
4 L
L / 2
∫
0
f (x) cos( 2πn
L x)dx (n ≥ 0)
2.3 Komplexe Darstellung
2.3.1 Periodenl¨ ange p = 2π f (x) =
∞
∑
n =−∞
c n e inx c n = 1 2π ∫
2π 0
e − inx f (x)dx
2.3.2 Periodenl¨ ange p = L f (x) =
∞
∑
n =−∞ c n e
2πinLx c n = 1 L ∫
L
0 e −
2πinLx f (x)dx
1
nur wenn a ≠ b; cos(cos(x)) ist π-periodisch
2
i sin(x) =
12(e
ix− e
−ix) ist gerade, so auch Re(e
...)
2.4 Umrechnung zwischen den Darstellungen
▸ a 0 = 2c 0 ▸ a n = c n + c − n ▸ b n = i(c n − c − n )
▸ c n =
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
a
n− ib
n2 n > 0
a
02 n = 0
a
−n+ ib
−n2 n < 0
Hierbei wird oft die Vorzeichenfunktion sgn() verwendet:
sgn(x) =
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
1 n > 0 0 n = 0
−1 n < 0
/ Beispiel: c k = ∫
1
0 e x ⋅ e − 2πikx dx Ô⇒ a k , b k
c k = ∫
1 0
e x ⋅ e − 2πikx dx =
e − 1
1 + 4π 2 k 2 (1 + 2πik) f(x) = (e − 1)
∞
∑
k =−∞
1 + 2πik
1 + 4π 2 k 2 ⋅ e 2πikx
= (e − 1)
∞
∑
k =−∞
1 + 2πik
1 + 4π 2 k 2 ⋅ (cos(2πkx) − i sin(2πkx))
= (e − 1)[ 1
®
k = 0
+2
∞
∑
k = 1
1 ⋅ cos(2πkx) 1 + 4π 2 k 2
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
R
( 1 + 2πik )⋅ 2
I( 1 + 2πik )= 0
−
2πk ⋅ sin(2πkx) 1 + 4π 2 k 2
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
R
( 1 + 2πik )= 0
I( 1 + 2πik )⋅ 2
]
2.5 Orthgonalit¨ atsrelationen
e ± πin =
⎧ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎩
1 n gerade
−1 n ungerade
∫
π
− π
e inx ⋅ e − ikx =
⎧ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎩
0 n ≠ k 2π n = k
= δ n,k ⋅ 2π
δ n,k =
⎧ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎩
0 n ≠ k 1 n = k / Beispiel: 1
2π ∫
π
− π
(e iax + 4e 3ix ) ⋅ e − inx = δ a,n + 4δ 3,n
F¨ ur n, k ∈ N 0 gilt:
(i) ∫
π
− π cos(kx) ⋅ cos(nx)dx =
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
2π n = k = 0 π n = k ≠ 0 0 n ≠ k
(ii) ∫
π
− π
sin(kx) ⋅ sin(nx)dx =
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
0 n = k = 0 π n = k ≠ 0 0 n ≠ k (iii) ∫
π
− π sin(kx) ⋅ cos(nx)dx = 0
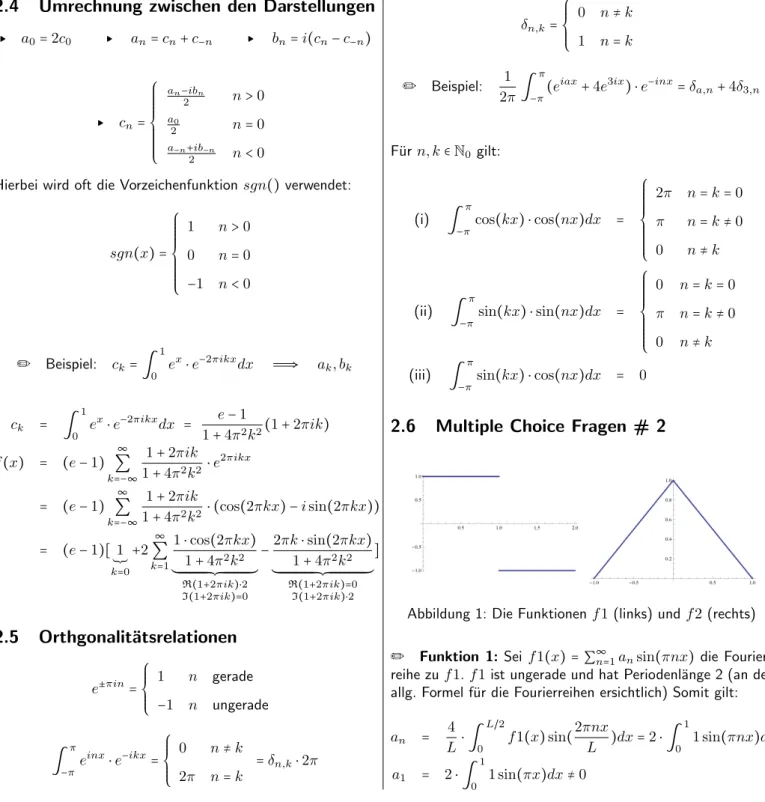
2.6 Multiple Choice Fragen # 2
Abbildung 1: Die Funktionen f 1 (links) und f 2 (rechts) / Funktion 1: Sei f 1(x) = ∑ ∞ n = 1 a n sin(πnx) die Fourier- reihe zu f 1. f 1 ist ungerade und hat Periodenl¨ ange 2 (an der allg. Formel f¨ ur die Fourierreihen ersichtlich) Somit gilt:
a n = 4 L ⋅ ∫
L / 2 0
f 1(x) sin( 2πnx
L )dx = 2 ⋅ ∫
1 0
1 sin(πnx)dx a 1 = 2 ⋅ ∫
1
0 1 sin(πx)dx ≠ 0
Definiert man die Fourierreihe von 0 bis ∞, so gilt
f 1(x) = ∑ ∞
n = 1
a n sin(πnx) = ∑ ∞
n = 0
a 2n + 1 sin((2n + 1)πx)
, da im Integral sich ∫ sin(πnx) sich alternierend aufl¨ ost.
/ Funktion 2: Sei f 2(x) = a 2
0+ ∑ ∞ n = 1 a n cos(πnx) die Fou- rierreihe zu f 2. f 2 ist gerade und hat widerum Periodenl¨ ange 2
a 0 = 2 L ∫
L / 2
− L / 2
f (x)dx = ∫
1
− 1
f (x)dx
= ∫
0
− 1 (x + 1)dx + ∫
1
0 (x − 1)dx = [ x 2
2 + x]
0
− 1
+ [x − x 2
2 ]
1
0
= 1
/ Funktion 3: Sei f 3(x) = ∑ ∞ n = 1 b n sin(πnx) die Fourierrei- he zur Funktion f 3(x ) = ∫ 0 x g(x)dx − x. Weder lim n →∞ n 2 a n noch lim n →∞ n 2 b n werden 0.
/ Funktion 4: Sei f 4(x) = ∑ ∞ n = 1 a n cos(2πnx) die Fourier- reihe zur Funktion f 4 und sei g4(x) = df4 dx die Ableitung eben dieser Funktion f 4.
Frage: Verschwindet der nullte Koeffizient von g4 ? Antwort: Ja, da f 4 eine gerade Funktion ist, wird g4 zur ungeraden Funktion und somit gilt a 0 ⊂ a n = 0.
/ Funktion 5: Sei f 5(x) = a 2
0+ ∑ ∞ k = 1 a k cos(kπx) + b k sin(kπx) die Fourierreihe zur Funktion f 4. Man sieht, dass wenn man die Funktion fortsetzt, sie ungerade ist. Also gilt a k = 0∀ k ∈ N 0 .
Abbildung 2: Die Funktion f 5
F¨ ur b k folgt b k = 2 ∫
L / 2 0
f (x) sin(πnx)dx = 2 ∫
1 0
f (x) sin(πnx)dx
= 2 ∫
0.5 0
1 ⋅ sin(πnx)dx = −2 ⋅ [
cos(πnx) πn ]
0.5
0
= 2
πn (1 − cos( πn 2 )) =
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
2
πn n ungerade
4
πn n = 2, 6, 10 . . . 0 n = 0, 4, 8 . . .
2.7 Konvergenzsatz
Eine 2π-periodische Funktion kann durch eine Fourier-Reihe dargestellt werden, wenn diese st¨ uckweise glatt ist, d.h. wenn sie ¨ uberall stetig diffenenzierbar ist, bis auf einzelne Sprung- punkte ξ i .
Abbildung 3: Der Graph einer st¨ uckweise glatten Funktion Der Konvergenzsatz besagt nun:
Die Fourier-Reihe einer periodischen, st¨ uckweise glatten Funktion f konvergiert in jedem Punkt und es gilt
a 0 2 +
∞
∑
K = 1
[a k cos(kx) + b k sin(kx)] =
=
⎧ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎩
f (x) x Stetigkeitsstelle
1
2 lim x → ξ
−(f (x)) + 1 2 lim x → ξ
+(f (x)) x Sprungstelle ξ
2.8 Allgemeine Umformungen
In den Formeln f¨ ur die Fourier - Koeffizienten k¨ onnen und sol- len jeweils die folgenden Umformungen vollzogen werden:
∞
∑
n = 1
cos(nπ) =
∞
∑
n = 1
(−1) n n ∈ Z
∞
∑
n = 1
sin( nπ 2 )
n =
∞
∑
n = 0
(−1) n 1
2n + 1 n ∈ Z
2.9 L¨ osen einer PDE durch Fourieransatz
y(x) = A 0
2 +
∞
∑
n = 1
A n ⋅ cos(nx) + B n ⋅ sin(nx) y(x) ′ =
∞
∑
n = 1
−A n ⋅ n ⋅ sin(nx) + B n ⋅ n ⋅ cos(nx) y(x) ′′ =
∞
∑
n = 1
−A n ⋅ n 2 ⋅ cos(nx) − B n ⋅ n 2 ⋅ sin(nx)
2.9.1 Vorgehen
1. Einsetzen des Fourieransatzes in die homogene PDE 2. Berechnen der Koeffizienten a 0 , a n und b n durch 2π-
periodische Fortsezung der rechten Seite
3. Einsetzen der Koeffizienten in die Gleichung f¨ ur die Fou- rierreihe f(x) = a 2
0+ ∑ ∞ n = 1 a n ⋅ cos(nx) + b n ⋅ sin(nx) 4. Koeffizientenvergleich ⇒ A 0 , A n und B n
5. Koeffizienten in den Ansatz einsetzen
/ Beispiel: Bestimmen sie durch Fourieransatz die 2π- periodischen L¨ osungen von
y ′′ − y = ∣sin( x 2 )∣
Der Fourieransatz in die homogene PDE eingesetzt ergibt
− A 0
2 +
∞
∑
n = 1
−A n (n 2 + 1) ⋅ cos(nx) − B n (n 2 + 1) ⋅ sin(nx)
Die rechte Seite ist eine gerade Funktion, womit b n = 0 ist.
a 0 = 2 π ∫
π 0 sin( x
2 )dx = [
− cos( x 2 ) 0.5 ]
π
0
= f racπ4 a n =
2 π ∫
π 0
sin( x
2 ) cos(nx)dx
= 2 π ∫
π 0
1 2 (sin( x
2 − nx) + sin( x
2 + nx)) dx
= 1 π [
1 2 (
− cos( x 2 − nx)
1
2 − n −
cos( x 2 + nx)
1
2 + n )]
π
0
= 1 π (
1
1 2 − n +
1
1 2 + n ) =
1 π (
4 1 − 4n 2 ) f (x) =
2 π +
∞
∑
n = 1
4 π(1 − 4n 2 )
cos(nx)
Nun gilt es, bei den unterstrichenen Termen einen Koeffi- zientenvergleich durchzuf¨ uhren
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
A 0 = − π 4
A n = − π ( 1 − 4n
24 )( n
2+ 1 ) B n = 0
Damit lautet die ursr¨ unglich gesuchte Funktion y(x) = − 2
π +
∞
∑
n = 1
−
4
π(1 − 4n 2 )(n 2 + 1) cos(nx)
2.10 Fourier - Transformation
f ˆ (k) = ∫
R
nf (x)e − ikx dx f (x) =
1 2π ∫
R
nf ˆ (k)e ikx dk
N¨ utzliche Rechnungen
∫
R
ne − ax
2e − ikx dx = e −
k2 4a
√ π
a
∫
R
ne −( ak
2+ bk + c ) dk =
√ π
a e
b2 4a
− c
∫
R
ne −∣ x
2∣ dx =
√ π
∫
R
n1
1 + k
2dk = π
/ Beispiel zum L¨ osen von PDE’s:
u t = u xx + 2u x + 3u transformiert ergibt:
ˆ
u t = (ik) 2 u ˆ + 2ik u ˆ + 3ˆ u
2.10.1 L¨ osen von Integralen mit Fouriertrafo Zu berechnen:
∫
∞
−∞
(t cos(t) − sin(t)) sin( t 2 )
t 2 dt
Aus einer vorigen Fouriertrafo ist bekannt:
Ô⇒ f (x) = 1 2π ∫
∞
−∞ 2i k cos(k) − sin(k) k 2 e ikx dk Die letzte Gleichung wird nun umgeformt:
f (x) = 1 2π ∫
∞
−∞ 2i k cos(k) − sin(k) k 2 e ikx dk
= i 1 π ∫
∞
−∞
k cos(k) − sin(k)
k 2 cos(kx) dk
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
=
Imf( x )= 0
, weilf ( x )
reell ist− 1 π ∫
∞
−∞
k cos(k) − sin(k)
k 2 sin(kx) dk
= − 1 π ∫
∞
−∞
k cos(k) − sin(k)
k 2 sin(kx) dk Es gilt also f (x) = − 1 π ∫ −∞ ∞
k cos ( k )− sin ( k )
k
2sin(kx) dk . In dieser Gleichung setzen wir x = 1 2 und formen sie anschliessend um:
f (1/2)
´¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¶
=
12= − 1 π ∫
∞
−∞
k cos(k) − sin(k)
k 2 sin(k/2) dk
Ô⇒ ∫
∞
−∞
k cos(k) − sin(k)
k 2 sin(k/2) dk = −
π
2
3 PDE :: Einleitung
3.1 ODE :: R¨ uckblick
Das L¨ osen der homogenen Diffenentialgleichung erfolgt mit dem Ansatz u = c 1 e λt . Dies sei f¨ ur folgende 2 F¨ alle gezeigt:
u tt − ω 2 u = 0 ⇒ u(t) = c 1 e ωt + c 2 e − ωt = 0 u tt + ω 2 u = 0 ⇒ u(t) = c 1 e iωt + c 2 e − iωt = 0
u(t) = d 1 cos(ωt) + d 2 sin(ωt) = 0
3.2 Klassifizierung der PDE
Ordnung = h¨ ochste Ableitung der unbekannten Funk- tion
Linearit¨ at
– linear Die Koeffizienten vor den Ableitungen sind nicht von der gesuchten Funktion abh¨ angig.
Beispiel: u t = b oder auch u tt − c 2 u xx
– quasilinear Wenn die Ableitungen h¨ ochster Ord- nung linear sind und die Koeffizientenfunktionen vor der h¨ ochsten Ableitung von niedrigeren Ablei- tungen und der unbekannten Funktion abh¨ angen Beispiel: u t + uu x = 0 (reibungsfreie Burgersglei- chung)
– nichtlinear Eine nichtlineare PDE enth¨ alt Pro- dukte der abh¨ angigen Variablen und/oder ihrer Ab- leitungen.
Beispiel: u t + uu x = µu xx
3.3 Klassifikation von linearen PDE’s 2.Ord- nung
au xx + bu xy + cu yy = f
⎡ ⎢
⎢ ⎢
⎢ ⎢
⎢ ⎢
⎢ ⎢
⎣
dx dy 0
0 dx dy
a b c
⎤ ⎥
⎥ ⎥
⎥ ⎥
⎥ ⎥
⎥ ⎥
⎦
´¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¸¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¹¶
A
⎡ ⎢
⎢ ⎢
⎢ ⎢
⎢ ⎢
⎢ ⎢
⎣ u xx
u xy
u yy
⎤ ⎥
⎥ ⎥
⎥ ⎥
⎥ ⎥
⎥ ⎥
⎦
=
⎡ ⎢
⎢ ⎢
⎢ ⎢
⎢ ⎢
⎢ ⎢
⎣ d(u x ) d(u y ) f
⎤ ⎥
⎥ ⎥
⎥ ⎥
⎥ ⎥
⎥ ⎥
⎦
Ist A regul¨ ar, so hat man eine eindeutige L¨ osung; ist det(A) = 0, so gibt es ∞-viele L¨ osungen.
Wann ist det(A) = 0 ?
det(A) = c(dx) 2 + a(dy) 2 − bdxdy = 0 0 = a( dy
dx ) 2 − b( dy dx ) + c
Die Diskriminatnte D = b 2 − 4ac bestimmt nun die Anzahl der L¨ osungen und den Typ der PDE.
3.3.1 Der Typ der PDE Die Diskriminante lautet
D = b 2 − 4ac Sie kennzeichnet den Typ der PDE.
Elliptisch D < 0 keine reelle L¨ osung
z.B. ∆u = 0 (Laplace-Gleichung), ∆u − f = 0 (Poisson- Gleichung)
Parabolisch D = 0 1 reelle L¨ osung z.B. u x − u yy = 0 (W¨ armeleitungsgleichung)
Hyperbolisch D > 0 2 reelle L¨ osungen z.B. u xx − c 2 u yy = 0 (Wellengleichung)
3.4 Variabelntransformation
Allgemeiner Ansatz
⎛
⎜
⎝ ξ η
⎞
⎟
⎠
=
⎡ ⎢
⎢ ⎢
⎢ ⎢
⎣ a b c d
⎤ ⎥
⎥ ⎥
⎥ ⎥
⎦
⎛
⎜
⎝ x t
⎞
⎟
⎠
wobei det(A) ≠ 0 sein muss, wegen R¨ ucktransformation Beispiel
u tt + 2u xt − 2u xx = 0
1. Aus dem allgemeinen Ansatz ergibt sich, dass:
u x = au ξ + cu η
u t = bu ξ + du η
und
u xx = a 2 u ξξ + 2acu ξη + c 2 u ηη
u xt = abu ξξ + (ad + bc)u ξη + cdu ηη
u tt = b 2 u ξξ + 2bdu ξη + d 2 u ηη
2. Einsetzen in die PDG und a,b,c,d so w¨ ahlen, dass u ξη = 0 herauskommt.
3. Es folgt:
b = (−1 ±
√ 2)a d = (−1 ±
√ 2)c Man w¨ ahle a=1, b =
√ 2 − 1, c=1 und d = −
√ 2 − 1.
Man sieht, dass die Determinante so nicht verschwindet.
Die L¨ osung der Gleichung lautet nun:
u(ξ, η) = F (ξ) + G(η) Nach der R¨ ucksubstitution folgt:
4. u(x, t) = F(x + (
√
2 − 1)t) + G(x + (−
√ 2 − 1)t) Satz
Sei Au xx + Bu xy + Cu yy = 0, dann gibt es eine Koordinaten- transformation
⎧ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎩
x ′ = ax + by a, b, c, d ∈ R y ′ = cx + dy
so dass sich die PDG auf die Form:
A ′ u x
′x
′+ B ′ u x
′y
′+ Cu y
′y
′= 0
bringen l¨ asst, dann und nur dann wenn (B 2 − 4AC) und (B ′ 2 − 4A ′ C ′ ) das gleiche Vorzeichen haben.
B 2 − 4AC < 0 elliptisch B 2 − 4AC = 0 parabolisch B 2 − 4AC > 0 hyperbolisch
Die Variabeltransformation ¨ andert den Typ nicht.
3.5 Typ eines Systems zweier quasilinearer PDE’s
Das folgende System zweier quasilinearer PDE’s
⎧ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎩
f 1 = a1u x + b1u y + c1v x + d1v y
f 2 = a2u x + b2u y + c2v x + d2v y
mit den Unbekannten u(x, y) und v(x, y) hat die Diskrimi- nante
D =(a1d2 − a2d1 + b1c2 − b2c1) 2
− 4(a1c2 − a2c1)(b1d2 − b2d1)
3.6 Die Bestimmung des anzuwendenden Schemas
1. Anfangs- und Randbedingungen:
PDE mit partiellen Ableitungen ersten und zweiten Gra- des nach den beiden Variablen.
AB: u(x, 0) = f (x) RB:
Dirichlet RB: (Werte auf dem Rand) RB muss nicht homogen sein:
u(0, t) = 0 u(L, t) = 0 Ô⇒ Separation der Variablen
Neumann RB: (Normalenableitungen) RB muss nicht homogen sein:
u x (0, t) = 0 u x (L, t) = 0 Ô⇒ Separation der Variablen
Periodische RB:
u(x, t) = u(x + L, t) Ô⇒ Fourier-Reihen Ansatz
2. Anfangswertprobleme in R oder R n (ohne RB)
PDE mit partiellen Ableitungen beliebigen Grades nach beiden Variablen.
Homogene PDE Bsp.: u t − ∆u = 0 AB: u(x, 0) = f (x)
Ô⇒ Fourier-Transformation in x
3. Anfangs- und Randbedingungen:
PDE mit partiellen Ableitungen beliebigen Grades nach beiden Variablen.
Homogene PDE Bsp.: u tt − u xx = 0 AB: u(x, 0) = u t (x, 0) = 0
RB: Sind von folgender Form (von t abh¨ angig):
u(0, t) = f (t) lim x →∞ u(x, t) = 0 Ô⇒ Laplace-Transformation in t
4. Lineare und quasilinieare partielle Differenzialgleichun- gen erster Ordnung.
Ô⇒ Methode der Charakteristiken
3.7 Die Methode der Charakteristiken
3.7.1 Algorithmus
⎧ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎩
u t + c(x, t, u)u x = d(x, t, u) , t ≥ 0, u(x, 0) = f (x)
1. F¨ ur jedes x 0 l¨ ose man das System:
˙
x(t) = c(x(t), t, z(t)), (1)
˙
z(t) = d(x(t), t, z(t)), (2)
mit Anfangsbedingungen x(0) = x 0 , z(0) = z 0 = f (x 0 ) 2. Die L¨ osung ist implizit durch die Gleichung
u(x(t), t) = z(t) gegeben
3. Um u(x, t) zu bestimmen, finde man x 0 , so dass f¨ ur die L¨ osung von (1), (2) mit dieser Anfangsbedingung x(t) = x.
Jede durch t parametriesierte Kurve t → (t, x(t), z(t)), die das System (1), (2) erf¨ ullt, heisst Charakteristik 3.7.2 Beispiel
⎧ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎩
u t − uu x = 0 , t ≥ 0, u(x, 0) = f (x)
In diesem Fall ist: c(x, t, z) = z und d = 0
Gleichungen der Charakteristiken: x(t) = −z(t) ˙ und z(t) = ˙ 0 L¨ osungen mit folgenden AB: x(0) = x 0 , z(0) = f (x 0 ) x(t) = x 0 − f (x 0 )t, und z(t) = f (x 0 )
L¨ osung des Anfangswertproblems ist implizit:
u(x, t) = f (x 0 ), und x = x 0 − f (x 0 )t
3.8 Inhomogene PDE’s
3.8.1 Beispiel
⎧ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎩
u t − αu xx = sin(x) t > 0, x ∈ R u(x, 0) = 0 x ∈ R 3.8.2 Vorgehen
1. L¨ osung des inhomogenen Problems schreiben als u(x, t) = u(x, t) + ˜ U (x, t), wobei U (x, t) die partikul¨ are L¨ osung des inhomogenen Problems ist, und u ˜ die allge- meine L¨ osung des homogenen Problems.
2. Finde partikul¨ are L¨ osung 3. L¨ ose das homogene Problem 3.8.3 L¨ osungsweg
1. 0 − αU ′′ = sin(x) → U = sin α ( x ) 2. u ˜ t − α˜ u xx = 0
t = 0 → u(x, 0) = u(x, ˜ 0) + αsin 1 ( x ) = 0
⎧ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎩
˜
u(x, 0) = − α sin 1 ( x ) (= f (x))
˜
u t − α˜ u xx = 0
3. u(x, t ˜ ) = ∫ R K t (x − x ′ )f (x ′ )dx ′
4. u(x, t) = − α 1 ∫ R K t (x − x ′ ) sin(x ′ )dx ′ + 1 α sin(x)
3.9 Separation der Variabeln SdV
u(x, t) = X (x)T(t)
u x = X ′ T u xx = X ′′ T u t = X T ˙ u tt = X T ¨
Die so erhaltenen Ableitungen in die PDE einsetzen und so umstellen, dass alle von x und von t abh¨ angigen Ter- me getrennt sind.
Aus den Randbedingungen entscheiden, ob K <, =, > 0 ist und L¨ osung hinschreiben.
▶ X ′′
X = K ⇒ X ′′ − KX = 0
⇒
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
X(x) = A 1 e ωx + A 2 e − ωx (K = ω 2 > 0) X(x) = A 1 cos(ωx) + A 2 sin(ωx) (K = −ω 2 < 0) X(x) = A 1 x + A 2 (K = 0)
▶ −
Y ′′
Y = K ⇒ Y ′′ + KY = 0
⇒
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
Y (y) = B 1 cos(ωx) + B 2 sin(ωx) (K = ω 2 > 0) Y (y) = B 1 e ωx + B 2 e − ωx (K = −ω 2 < 0) Y (y) = B 1 x + B 2 (K = 0)
▶ X ′
X = K ⇒ X ′ − KX = 0
⇒
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
X(x) = A 1 e ω
2t (K = ω 2 > 0) X(x) = A 1 e − ω
2t (K = −ω 2 < 0)
X(x) = A 1 (K = 0)
▶ −
Y ′
Y = K ⇒ Y ′ + KY = 0
⇒
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
Y (y) = B 1 e − ω
2t (K = ω 2 > 0) Y (y) = B 1 e ω
2t (K = −ω 2 < 0)
Y (y) = B 1 (K = 0)
Restliche Anfangs- und Randbedingungen einbauen, um auf die L¨ osung zu kommen.
Wichtig: Konstanten immer wieder zusammenfassen.
/ Beispiel # 1
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
u xx + u yy = 0 u(0, y) = u(L, y) = 0
u(x, 0) = 0 L > 0 u(x, L) = −3 sin(4π L x )
Gesucht: L¨ osungen der Form u(x, y) = f (x)g(y).
Vorgehen 1. f f
′′( ( x x ) ) = − g
′′
( y ) g ( y ) = C
2. f (x) =
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
A 1 e √ Cx + A 2 e − √ Cx (C > 0) A 1 cos( √
−Cx) + A 2 sin( √
−Cx) (C < 0)
A 1 x + A 2 (C = 0)
und g(y) =
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
B 1 e √ − Cy + B 2 e − √ − Cy (C < 0) B 1 cos √
Cy + B 2 sin √
Cy (C > 0) B 1 y + B 2 (C = 0) 3. aus u(0, y) = u(L, y) = 0 folgt, dass f(0)=f(L)=0 gilt.
Nur die L¨ osung f¨ ur C < 0 macht sinn f¨ ur diese Forde- rung.
4. Es folgt A 1 = 0 und aus A 2 sin √
−CL = 0, dass
√
−CL = kπ, also f (x) = A 2 sin( kπx L ) 5. da C < 0 ist g(y) = B 1 e kπy / L + B 2 e − kπy / L 6. aus u(x, 0) = 0 folgt dass g(0) = 0 also B 1 = −B 2
7. u(x, y) = A sin( kπx L ) sinh( kπy L )
8. aus einsetzen folgt noch dass k=4 und A = sinh − ( 3 4π ) 9. Die L¨ osung ist also u(x, y) = sinh − ( 3 4π ) sin( 4πx L ) sinh( 4πy L )
/ Beispiel # 2
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
∆u(x, y) = 0 0 < x < π 0 < y < π u(x, 0) = u(x, π) = u(0, y) = 0
u x (π, y) = sin(y)
Gesucht: L¨ osungen der Form u(x, y) = X(x)Y (y).
Vorgehen
1. X ′′ Y + XY ′′ = 0 ⇒ X
′′
X = − Y
′′
Y = K
2. aus u(x, 0) = u(x, π) weiss man: u periodisch in y und K > 0
3. X (x) = A 1 e ωx + A 2 e − ωx und Y (y) = B 1 cos(ωy) + B 2 sin(ωy)
4. Y (0) = 0 = B 1 , sowie Y (π) = 0 = B 2 sin(ωπ) und daher ω = k ∈ G
5. X (0) = 0 zeigt: A 1 = −A 2
6. u(x, y) = (A 1 e kx − A 1 e − kx )(B 2 sin(ky))
=(C 1 sinh(kx))(B 2 sin(ky)) = D 1 (sinh(kx) sin(ky)) 7. u x (π, y) = D 1 ⋅ k ⋅ cosh(kπ) sin(ky) = sin(y) , womit
k = 1 sein muss
8. D 1 = cosh 1 ( π ) in die allgemeine Gl. einsetzen 9. Die L¨ osung lautet somit u(x, y) = sinh ( cosh kx ) ( sin π ) ( ky ) Weitere Funktionen und ihre L¨ osungen
▶ y g ˙
g = K ⇒ g(y) = A 1 ⋅ y K
▶ f ′
e x f = K ⇒ f (x) = B 1 ⋅ e K ⋅ e
x▶
f ′′ − f k
f = K (k > 0) ⇒ f ′′ − f (k + K) = 0
⇒
⎧ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎩
f (x) = A 1 e √ k + ω
2x + A 2 e − √ k + ω
2x (K = ω 2 > 0) f (x) = B 1 cos(
√
ω 2 − kx) + B 2 sin(
√
ω 2 − kx)(K = −ω 2 < 0)
4 W¨ armeleitungsgleichung
... das Standart - Beispiel f¨ ur parabolische PDE’s.
u t − αu xx = 0 (−∞ < x < ∞) u t − a 2 u xx = 0 (−∞ < x < ∞)
4.1 Ans¨ atze mit RB’s (t > 0, x ∈ (0, l))
u(0, t) = u(l, t) = 0
u(x, t) = ∑ ∞ n = 1 c n sin( nπx l )e − α
n2π2t l2
u x (0, t) = u x (l, t) = 0
u(x, t) = ∑ ∞ n = 0 c n cos( nπx l )e − α
n2π2t l2
u(0, t) = u x (l, t) = 0
u(x, t) = ∑ ∞ n = 0 c n sin(ω n x)e − αω
2nt ω n = π ( 1 2l + 2n ) n = 0, 1, ...
4.2 L¨ osung des Anfangwertproblems
⎧ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎩
u t − αu xx = 0 − ∞ < x < ∞ u(x,0) = f (x) − ∞ < x < ∞
u(x, t) =
∞
∫
−∞
K t (x − x ′ )f (x ′ )dx ′ mit W¨ armeleitungskern
K t (x − x ′ ) = 1
√
4παt e −
(x−x′)2 4αt
Der W¨ armeleitungskern erf¨ ullt:
1. ∫ ∞
−∞ K t (x − x ′ )dx = 1 2. K t (x − x ′ ) > 0
/ Zwei St¨ abe, die zusammengef¨ ugt werden
f (x) =
⎧ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎩
T 1 x > 0 T 2 x < 0
liefert f¨ ur T 1 = −T 2 ≡ T Ô⇒ u(x, t) = T ⋅ erf (
x
√ 2αt ) mit: erf (z) = √ 1 2π
z
− ∫ z
e −
y2 2
dy
Falls T 1 ≠ T 2
u(x, t) = T
1+ 2 T
2+ T
1− 2 T
2erf ( √ x 2αt )
4.3 Skalierung
/ W¨ armeleitung in einem d¨ unnen Stab Die Ausgangslage ist
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
u t = a 2 u xx
u(x, 0) = U A = const. x ∈ [0, L] Ziel t = 0 ⇒ 1 u(0, t) = U W = const. t > 0 Ziel t → ∞ ⇒ 0 u x (L, t) = 0 da isoliert
1. L¨ ange dimensionslos machen von [0, L] → [0, 1] mit
˜ x = L x
v(˜ x, t) = u(L˜ x, t) − U W U A − U W
⎧ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎩
v(˜ x, 0) = 1 v(0, t) = 0 v t = u t ⋅
1 U A − U W
v x ˜ = L ⋅ u x ⋅ 1 U A − U W
v x˜ ˜ x = L 2 ⋅ u xx ⋅ 1 U A − U W
In u t = a 2 u xx eingesetzt ergibt das (U A − U W ) ⋅ v t = a 2 ⋅
U A − U W
L 2 ⋅ v x˜ ˜ x ⇒ v t = a 2 L 2 ⋅ v x˜ ˜ x
2. Temperatur dimensionslos machen von [U W , U A ] → [0, 1] mit ˜ t = τ t τ muss L a
22sein
τ v t = v x˜ ˜ x
Die neue Funktion w(˜ x, t) = ˜ v(˜ x, τ t) ˜ f¨ uhrt zu w ˜ t τ v t = w x˜ ˜ x ⇒ w ˜ t = w ˜ x˜ x Das Problem nach der Skalierung lautet also nun
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
w ˜ t = w ˜ x˜ x
w(x, 0) = 1 x ∈ [0, 1]
w(0, ˜ t) = 0 τ > 0 w ˜ t (L, ˜ t) = 0 τ > 0
/ W¨ armeleitung im geschlossenen Draht Die Aufgabenstellung
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
PDE: v t = a 2 v xx
AB: v(x, 0) =
⎧ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎩
V 1 0 ≤ x < L V 2 L ≤ x < 2L RB: v(0, t) = v(2L, t)
soll auf die Problemstellung
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
PDE: u t = v xx
AB: u(x, 0) =
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
1 0 < x < π 2
−1 π 2 < x < 3π 2 1 3π 2 < x < 2π RB1 u(0, t) = u(2π, t)
umskaliert werden. Ansatz dazu ist w(x, t) = v( Lx
π , βt).
Ableiten nach t und einsetzen in die PDE ergibt w t = βv t = βa 2 v xx = βa 2 v xx = βa 2 π 2
L 2 w xx .
Um a wegzuskalieren, muss man β = ( πa L ) 2 setzen.
In den Ansatz eingesetzt ergibt das w(x, t) = v( Lx
π , ( L
πa ) 2 t) Ô⇒ v(x, t) = w( πx L , (
πa L ) 2 t).
Die Translation von u zu v wird beschrieben durch u(x, t) = w(x + π 2 , t) − V
1− 2 V
2V
1− V
22
. , womit die Skalierung beendet ist.
4.4 L¨ osung der Anfangsrandwertaufgabe
/ W¨ armeleitung im geschlossenen Draht
Abbildung 4: W¨ armeleitung im geschlossenen Draht der L¨ ange 2π
Falls das Problem noch nicht skaliert ist, zuerst umskalieren.
Die Aufgabenstellung lautet
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎩
u(x, t) x ∈ [0, 2π] t ≥ 0 PDE: u t = u xx
AB: u(x, 0) = f (x) =
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
1 0 < x < π 2
−1 π 2 < x < 3π 2 1 3π 2 < x < 2π RB1: u(0, t) = u(2π, t)
RB2: u x (0, t) = u x (2π, t) RB3: u xx (0, t) = u xx (2π, t)
Vorgehen
1. Separation der Variabeln u(x, t) = X (x)T(t) in die PDE eingesetzt ergibt das
T ˙ T =
X ′′
X = K = const.
Dies f¨ uhrt auf die 2 ODE’s T ˙ = KT X ′′ = KX
Da u 2π-periodisch in x ist (aus RB1), muss eine peri- odische L¨ osung f¨ ur X gelten. Darum muss K < 0 sein.
Wir setzen K = −ω 2 .
Daraus ergeben sich nun die L¨ osungen der ODE’s X ′′ + ω 2 X = 0 Ô⇒ X = A cos(wx) + B sin(wx)
T ˙ + ω 2 T = 0 Ô⇒ T = Ce − ω
2t
X und T in den SdV - Ansatz u(x, t) = X(x)T (t) ein- gesetzt ergibt die Basisfunktion u k . Mit k ∶= ω k und A ′ k = C k ⋅ A k und B k ′ = C k ⋅ B k lautet sie
u k (x, t) = e − k
2t (A ′ k cos(kx) + B k ′ sin(kx)) 2. Superposition Die PDE ist linear und homogen, wo-
mit das Superpositionsprinzip gilt. Dasselbe gilt auch f¨ ur die RB. Die erhaltene Basisfunktion erf¨ ullt beide dieser Gleichungen, womit man duch Superposition die L¨ osung erh¨ alt.
u(x, t) =
∞
∑
k = 0
u k (x, t)
=
∞
∑
k = 0
e − k
2t (A ′ k cos(kx) + B k ′ sin(kx)) 3. Erf¨ ullen der AB Einseten der superponierten L¨ osung in
die AB f¨ uhrt zu u(x, 0) = f (x)
=
∞
∑
k = 0
(A ′ k cos(kx) + B k ′ sin(kx))
was eine Fourier - Reihe darstellt. Also muss f (x) in eine Fourier - Reihe entwickelt werden.
Zeichnet man die Funktion auf, so erkennt man, dass sie gerade ist. Also berechnet man die Fourier - Koeffizien- ten f¨ ur eine gerade Funktion und f¨ uhrt den Koeffizien- tenvergleich durch.
B k ′ = 0 A ′ k =
2 π
π
∫
0
f (x) cos(kx)dx
= 2 π (
π / 2
∫
0
cos(kx)dx −
π
∫
π / 2
cos(kx)dx)
= 4
πk sin( πk 2 ) f (x) =
∞
∑
k = 0
(−1) k 4
π(2k + 1) cos((2k + 1)x) = u(x, 0) In u(x, t) eingesetzt ergibt das die L¨ osung
u(x, t) = 4 π ⋅
∞
∑
k = 0
(−1) k 1
2k + 1 cos((2k + 1)x) ⋅ e −( 2k + 1 )
2t / W¨ armeleitung in einer Kugel
Die W¨ armeleitungsgleichung in 3-D lautet u t = ∆u(x, y, z) ∈ B t > 0 Die Randbedingung ist
u(x, y, z, t) = u W (x, y, z) ∈ ∂B und die Anfangsbedingung
u(x, y, z, 0) = u A (x, y, z) ∈ B Umskalierung mit v = u u − u
wA
− u
Wf¨ uhrt auf
PDE: v t = ∆v
RB: v(x, y, z, t) = 0 ∈ ∂B
AB: v(x, y, z, 0) = 1 ∈ B
Man nimmt Radialsymmetrie an und ¨ ubertr¨ agt das Pro- blem in sph¨ arische Koordinaten (Abh¨ angigkeit von r). Mit SdV erh¨ alt man so die Basisl¨ osung
v n (r, t) = B n
1 r sin( nπ
r 0
r)e
−n2π2 r2
0
t
Es wird wiederum superponiert, und das erf¨ ullen der AB (inhomogen) f¨ uhrt zur L¨ osung, die man noch in die Gleichung f¨ ur die Skalierung einzusetzen hat, um u(r, t) zu bekommen.
v(r, t) = − 1 r
2r 0
π
∞
∑
n = 1
(−1) n n sin( nπ
r 0 r)e
−n2π2 r2
0
t
4.5 Superpositionsprinzip
Gen¨ ugen u A und u B denselben homogenen linea- ren Anfangs- und Randbedingungen sowie dersel- ben linearen, homogenen PDE, so ist
u = αu A + βu B
eine L¨ osung der PDE und der Rand- und Anfangs- bedingung.
homogene PDE = keinen konstanten Term
homogene AB, RB = linear in u und ohne konstanten Term
4.6 Beispielaufgaben
/ Beispiel # 1: Drahtschleife im W¨ armebad
Aufgabenstellung: Die Drahtschleife mit Radius R wird zur Zeit t = 0 aus dem W¨ armebad mit W¨ armefunktion h(x, y) =
x
R T 0 genommen und k¨ uhlt nach dem W¨ armeleitungsgesetz u t = a 2 u ss
ab. L¨ osen Sie das Anfangswertproblem f¨ ur u.
Separation der Variabeln mit u t = T S ˙ und u s s = T S ′′ f¨ uhrt
auf T ˙
T = a 2 S ′′
S = K
Da die Funktion in s 2πR-periodisch ist (Umfang), muss C in S ′′ − a C
2S = 0 negativ sein, um periodische L¨ osungen zu bekommen.
S(s) = A 1 cos( ω
a s) + A 2 sin( ω a s)
,wobei ω a s = 2πn sein muss, mit n ∈ Z . Also ist ω = 2πna s = na R und die einzelnen ODE’s werden
S(s) = A 1 cos( n
R s) + A 2 sin( n R s) T (t) = B 1 e − ω
2t = B 1 e −
n2a2 R2
t
u n (s, t) = S(s)T(t) = (C 1 cos( n
R s) + C 2 sin( n R s))e −
n2a2 R2
t
Superposition heisst hier, dass die Basisfunktion u n in eine Fourierreihe entwickelt wird.
u(s, t) =
∞
∑
n = 1
°
Spos
(D n cos( n
R s) + E n sin( n R s))e −
n2a2 R2
t
Die Anfangsbedingung liefert die Funktion h(x, y) = R x T 0 , wobei in cyl. Koordinaten x = R cos( R s ) ist und deshalb h(x, y) = T 0 cos( R s ). Diese ist auch gleich u(s, 0), womit der Koeffizientenvergleich
u(s, 0) = T 0 cos( s R ) =
∞
∑
n = 1
D n cos( n
R s) + E n sin( n R s) folgende Resultate bringt
⎧ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎨
⎪ ⎪
⎪ ⎪
⎪ ⎪
⎪ ⎩
E n = 0 ∀n da links keine Sinusterme D 1 = T 0 n = 1 womit ¨ Ubereinstimmung herrscht D n = 0 n ≠ 1 f¨ ur alle andern n
Diese Resultate einsetzen f¨ uhrt direkt zur L¨ osung u(s, 0) = T 0 cos( s
R )e −
a2 R2