Sommersemester 2014
W. Ebeling
Wolfgang Ebeling c
Institut f¨ ur Algebraische Geometrie Leibniz Universit¨ at Hannover Postfach 6009
30060 Hannover
E-mail: ebeling@math.uni-hannover.de
Kurven im R n
7.1 Ebene Kurven
Wir wollen nun Kurven in der Ebene betrachten.
Definition Eine ebene Kurve ist die L¨ osungsmenge einer Gleichung:
C = {(x, y) ∈ R
2| F (x, y) = 0}.
Eine andere M¨ oglichkeit, Kurven zu beschreiben, ist eine Parameterdarstel- lung. Wir betrachten eine vektorwertige Funktion
~ r(t) =
x(t) y(t)
, (a ≤ t ≤ b).
L¨ asst man t variieren, so durchl¨ auft der Punkt ~ r(t) eine Kurve. Die Funktion
~ r(t) heißt Parameterdarstellung dieser Kurve, t der Parameter und [a, b] das Parameterintervall.
Kinematische Deutung
Man fasst t ∈ [a, b] als Zeit und ~ r(t) ∈ R
2als Ort auf. Die Parameterdarstel- lung beschreibt dann die Bewegung eines Massenpunktes auf der Kurve.
Zu einer Kurve gibt es unendlich viele verschiedene Parameterdarstellun- gen, denn es k¨ onnen auf ihr ganz verschiedene Bewegungen stattfinden.
Beispiel 7.1.1 (1) Die Gerade durch die Punkte P
0= (x
0, y
0) und P
1= (x
1, y
1) (P
06= P
1) hat die Gleichung
y − y
0y
1− y
0= x − x
0x
1− x
0⇔ (y
1− y
0)(x − x
0) − (x
1− x
0)(y − y
0) = 0.
3
Sie besitzt die Parameterdarstellung
~ r(t) =
x
0+ t(x
1− x
0) y
0+ t(y
1− y
0)
, (t ∈ R ).
(2) Der Kreis um P
0= (x
0, y
0) vom Radius R hat die Gleichung (x − x
0)
2+ (y − y
0)
2= R
2und die Parameterdarstellung
~ r(t) =
x
0+ R cos t y
0+ R sin t
, (0 ≤ t ≤ 2π).
(3) Kegelschnitte (in Hauptachsenlage):
x
2a
2+ y
2b
2= 1
a
b Ellipse
x
2a
2− y
2b
2= 1
a
b Hyperbel
Hier ist a, b > 0.
x
2− y = 0 Parabel
Die Ellipse hat die Parameterdarstellung
~ r(t) =
a cos t b sin t
, (0 ≤ t ≤ 2π).
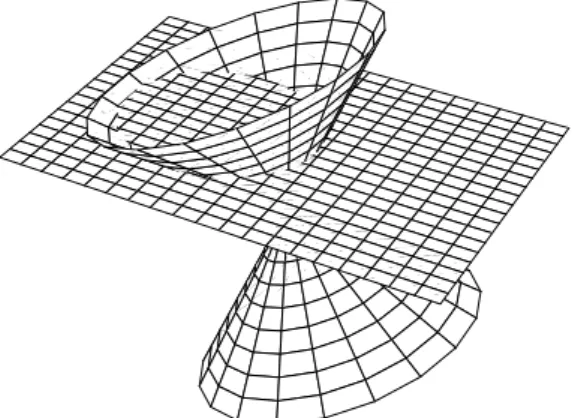
Abbildung 7.1: Die Ellipse als Kegelschnitt
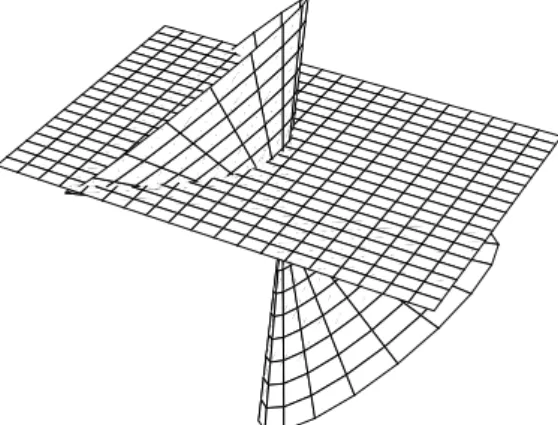
Abbildung 7.2: Die Hyperbel als Kegelschnitt
(4) Ein Graph y = f (x) (a ≤ x ≤ b) besitzt die Parameterdarstellung
~ r(t) =
t f (t)
, (a ≤ t ≤ b).
Von einer Parameterdarstellung x = x(t), y = y(t), kann man im Allgemei- nen nur st¨ uckweise zu einer expliziten Darstellung y = f(x) oder x = g(y)
¨ ubergehen: Zum Beispiel beim Kreis gilt f¨ ur 0 ≤ t ≤ π, π ≤ t ≤ 2π:
y = y
0+ p
R
2− (x − x
0)
2(0 ≤ t ≤ π), y = y
0− p
R
2− (x − x
0)
2(π ≤ t ≤ 2π).
(5) Zykloiden: L¨ asst man einen Kreis K vom Radius R auf der x-Achse
abrollen, so beschreibt ein Punkt P auf K, der vom Kreismittelpunkt M den
Abbildung 7.3: Die Parabel als Kegelschnitt Abstand a hat, eine Zykloide (oder Radkurve). Bild f¨ ur a = R:
0 Rt 2πR
M R t P
Sie besitzt eine Parameterdarstellung
~ r(t) =
Rt − a sin t R − a cos t
, (0 ≤ t ≤ ∞).
Denn nach dem Abrollen um den Winkel t liegt M in (x
M, y
M) = (Rt, R) und P in (x(t), y(t)) mit
x(t) = x
M− a sin t = Rt − a sin t, y(t) = y
M− a cos t = R − a cos t.
Eine Epizykloide entsteht, wenn der Kreis nicht auf der x-Achse, sondern auf dem Kreis x
2+ y
2= ρ
2abrollt. Sie hat die Parameterdarstellung
~ r(t) =
(ρ + R) cos t − a cos
ρ+RRt (ρ + R) sin t − a sin
ρ+RRt
a = R =
ρ2Spezialfall: ρ = R = a: Herzlinie (Kardiode)
a = R = ρ
Eine Hypozykloide entsteht beim Abrollen in Innern des Kreises. Sie hat die Parameterdarstellung
~ r(t) =
(ρ − R) cos t + a cos
ρ−RRt (ρ − R) sin t − a sin
ρ−RRt
a = R =
ρ3Spezialfall: a = R =
ρ4: Astroide
a = R =
ρ4Es sei
~ r(t) =
x(t) y(t)
die Parameterdarstellung einer Kurve K. Wir setzen nun voraus, dass x(t), y(t) differenzierbare Funktionen sind.
Definition Der Vektor
~ ˙
r(t) := lim
h→0
~ r(t + h) − ~ r(t)
h =
x(t) ˙
˙ y(t)
heißt der Tangentialvektor an K zum Parameterwert t.
Geometrische Deutung
~ r(t) l¨ ˙ asst sich als Limes von Sekantenvektoren auffassen.
Kinematische Deutung
Beschreibt ~ r(t) die Bewegung eines Massenpunktes, dann ist ˙ ~ r(t) der mo- mentane Geschwindigkeitsvektor zum Zeitpunkt t.
Ist der Vektor
~ r(t) = ˙
x(t) ˙
˙ y(t)
vom Nullvektor verschieden, so gibt der Vektor
~ n(t) :=
− y(t) ˙
˙ x(t)
die positive Normalenrichtung in diesem Punkt an.
Definition Die Parameterdarstellung ~ r(t) =
x(t) y(t)
, (a ≤ t ≤ b) einer Kurve heißt regul¨ ar, wenn die Funktionen x(t), y(t) ¨ uber [a, b] stetig diffe- renzierbar sind und ˙ x(t)
2+ ˙ y(t)
26= 0 f¨ ur t ∈ [a, b] gilt ( ˙ x(a), ˙ x(b) einseitige Ableitungen).
Satz 7.1.1 (Bogenl¨ ange) (a) Die L¨ ange eines Kurvenbogens mit regul¨ arer Parameterdarstellung ~ r(t) =
x(t) y(t)
, a ≤ t ≤ b, betr¨ agt
L = Z
ba
| ~ r(t)|dt ˙ = Z
ba
p x(t) ˙
2+ ˙ y(t)
2dt
(b) Die Bogenl¨ ange des Graphen y = f(x) einer stetig differenzierbaren Funktion f : [a, b] → R betr¨ agt
L = Z
ba
p 1 + f
0(x)
2dx
Beispiel 7.1.2 (1) Der Kreisumfang: Ein Kreis vom Radius R hat die L¨ ange L =
Z
2π 0p R
2sin
2t + R
2cos
2tdt = Z
2π0
Rdt = 2πR.
(2) Die Bogenl¨ ange der Ellipse x
2a
2+ y
2b
2= 1 : Sie hat die Parameterdarstellung
~ r(t) =
a cos t b sin t
, (0 ≤ t ≤ 2π).
F¨ ur die L¨ ange ergibt sich
L =
Z
2π 0p a
2sin
2t + b
2cos
2tdt
= a Z
2π0
s 1 −
1 − b
2a
2cos
2tdt
= 4a Z
π20
√ 1 − k
2cos
2tdt mit k :=
√ a
2− b
2a
Die Zahl k nennt man auch die numerische Exzentrizit¨ at der Ellipse. Durch die Substitution τ =
π2−t (beachte sin
2τ = cos
2τ) erh¨ alt man die Bogenl¨ ange der Ellipse in der Form (τ wieder durch t ersetzt)
L = 4aE(k) mit E(k) :=
Z
π20
p 1 − k
2sin
2tdt.
E(k) ist ein elliptisches Integral zweiter Gattung und nicht elementar inte- grierbar.
(3) Der Zykloidenbogen x = R(t − sin t), y = R(1 − cos t) (0 ≤ t ≤ 2π) (a = R) hat die L¨ ange
L = R Z
2π0
q
(1 − cos t)
2+ sin
2tdt = 2R Z
2π0
sin t
2 dt = 8R.
Es sei
~ r(t) =
x(t) y(t)
eine regul¨ are Parameterdarstellung, a ≤ t ≤ b, mit zweimal differenzierbaren Funktionen x(t), y(t). Es sei
ϕ(t) := Winkel zwischen x-Achse und Tangentialvektor ˙ ~ r(t) =
x(t) ˙
˙ y(t)
s(t) :=
Z
t ap x(τ ˙ )
2+ ˙ y(τ )
2dτ
(L¨ ange des Kurvenbogens ¨ uber dem Intervall [a, t])
Die ¨ Anderung ∆ϕ der Tangentenrichtung bezogen auf die ¨ Anderung ∆s der Bogenl¨ ange ¨ uber dem Intervall [t, t + ∆t], also
∆ϕ∆s, ist ein Maß f¨ ur die durch- schnittliche Kr¨ ummung des Kurvenbogens ¨ uber diesem Teilintervall.
Definition Die Zahl
κ(t) := lim
∆t→0
∆ϕ
∆s = ϕ(t) ˙
˙ s(t)
heißt die Kr¨ ummung der Kurve im Punkt P (t) = (x(t), y(t)).
Satz 7.1.2 (a) Die Kr¨ ummung einer Kurve mit zweimal stetig differen- zierbarer regul¨ arer Parameterdarstellung ~ r(t) =
x(t) y(t)
, a ≤ t ≤ b, in P (t) = (x(t), y(t)) betr¨ agt
κ(t) = x(t)¨ ˙ y(t) − y(t)¨ ˙ x(t) p ( ˙ x(t)
2+ ˙ y(t)
2)
3(b) Die Kr¨ ummung des Graphen y = f (x) einer zweimal differenzierbaren Funktion f : [a, b] → R im Punkt (x, f(x)) betr¨ agt
κ(x) = f
00(x)
p (1 + f
0(x)
2)
3Wegen ˙ s = p
˙
x
2+ ˙ y
2> 0 haben κ und ˙ ϕ dasselbe Vorzeichen. Aus I, Satz 4.4.6, folgt
κ > 0 ⇒ ϕ w¨ achst ⇒ Linkskr¨ ummung κ < 0 ⇒ ϕ f¨ allt ⇒ Rechtskr¨ ummung Beispiel 7.1.3 Kr¨ ummung der Ellipse:
x y
=
a cos t b sin t
,
x ˙
˙ y
=
−a sin t b cos t
,
x ¨
¨ y
=
−a cos t
−b sin t
,
κ = x¨ ˙ y − y¨ ˙ x
p ( ˙ x
2+ ˙ y
2)
3= ab(sin
2t + cos
2t)
p (a
2sin
2t + b
2cos
2t)
3= ab
p (a
2sin
2t + b
2cos
2t)
3. Spezialfall: a = b = R: κ =
R1.
Beispiel 7.1.4 Kr¨ ummung der Parabel y = x
2: κ = y
00p (1 + y
02)
3= 2 p (1 + 4x
2)
3.
Definition Es sei P = (x(t), y(t)) ein Kurvenpunkt. Der zu P geh¨ orige Kr¨ ummungskreis ist der durch P gehende Kreis mit derselben Kr¨ ummung und Tangentenrichtung in P wie die Kurve. Der Radius r des Kr¨ ummungskrei- ses in P heißt der Kr¨ ummungsradius der Kurve in P .
Falls κ 6= 0 ist, gilt nach Beispiel 7.1.3 r = 1
|κ|
Der Mittelpunkt (x
M, y
M) des Kr¨ ummungskreises liegt auf der Normalen im Abstand
|κ|1von P und hat die Koordinaten
x
M= x(t) − 1 κ
˙ y(t)
p x(t) ˙
2+ ˙ y(t)
2= x − y ˙ x ˙
2+ ˙ y
2˙
x¨ y − y ˙ x ¨ y
M= y(t) + 1
κ
˙ x(t)
p x(t) ˙
2+ ˙ y(t)
2= y + ˙ x x ˙
2+ ˙ y
2˙
x¨ y − y¨ ˙ x
Durchl¨ auft t das Parameterintervall, dann durchl¨ auft (x
M, y
M) eine Kurve,
die Evolute der gegebenen Kurve genannt wird.
Beispiel 7.1.5 Evolute der Parabel x = t, y = t
2: x
M= t − 2t 1 + 4t
22 = −4t
3y
M= t
2+ 1 + 4t
22 = 3t
2+ 1 2 Diese Kurve heißt Neilsche Parabel.
Statt in kartesischen Koordinaten kann man eine Kurve auch in Polarko- ordinaten darstellen und den Winkel als Parameter nehmen.
Die Umrechnungsformeln kartesische Koordinaten ↔ Polarkoordinaten lauten
(a) x = r cos ϕ, y = r sin ϕ (b) r = p
x
2+ y
2, ϕ =
arccos
xr, falls y ≥ 0, 2π − arccos
xr, falls y < 0
unbestimmt, falls r = 0.
Lassen wir einen Zeiger, der sich um den Nullpunkt dreht und seine L¨ ange ver¨ andern kann, auf einer Kurve laufen, so hat er beim Winkel ϕ die L¨ ange r(ϕ). Die Polarkoordinaten des entsprechenden Kurvenpunktes sind (r(ϕ), ϕ), (α ≤ ϕ ≤ β).
Definition Die Darstellung
r = r(ϕ), α ≤ ϕ ≤ β,
heißt Polardarstellung der Kurve. Die x-Achse heißt Polarachse.
Die Parameterdarstellung der Kurve r = r(ϕ), α ≤ ϕ ≤ β, mit dem Winkel ϕ als Parameter lautet:
ϕ 7→
r(ϕ) cos ϕ r(ϕ) sin ϕ
(α ≤ ϕ ≤ β)
Mit dieser Parameterdarstellung kann man Tangentialvektoren, Bogenl¨ ange, Kr¨ ummung usw. berechnen. Insbesondere folgt aus Satz 7.1.1(a) f¨ ur die Bo- genl¨ ange der Kurve r = r(ϕ), α ≤ ϕ ≤ β
L = Z
βα
s
r(ϕ)
2+
dr(ϕ) dϕ
2dϕ
Beispiel 7.1.6 (1) Polardarstellung eines Kreises vom Radius c um 0: r = c.
(2) Die Archimedische Spirale hat die Polardarstellung r = aϕ (a > 0, 0 ≤ ϕ < ∞).
Die Bogenl¨ ange nach einem Umlauf betr¨ agt:
L =
Z
2π 0p (aϕ)
2+ a
2dϕ
= a Z
2π0
p ϕ
2+ 1dϕ Substitution: ϕ = sinh t, dϕ = cosh t
= a
Z
arsinh 2π arsinh 0cosh
2tdt
= a 2
2π p
1 + (2π)
2+ ln(2π + p
1 + (2π)
2)
.
(3) Die Herzlinie hat die Polardarstellung
r = a(1 + cos ϕ) (a > 0, 0 ≤ ϕ ≤ 2π).
(Zugeh¨ orige Parameterdarstellung:
ϕ 7→
a2
+
a2(2 cos ϕ + cos 2ϕ)
a
2
(2 sin ϕ + sin 2ϕ)
(0 ≤ ϕ ≤ 2π)
Bogenl¨ ange:
L = a Z
2π0
q
(1 + cos ϕ)
2+ sin
2ϕdϕ = 8a.
Wir wollen nun Sektorfl¨ achen ¨ uber Kurvenst¨ ucken betrachten. Es sei t 7→
x(t) y(t)
, a ≤ t ≤ b,
eine st¨ uckweise stetig differenzierbare Parameterdarstellung eines ebenen Kur- venst¨ ucks K , das von jedem Ursprungsstrahl h¨ ochstens einmal getroffen wird.
Dann besitzt K eine Polardarstellung r = r(ϕ), α ≤ ϕ ≤ β, so dass jedem Winkel ϕ h¨ ochstens ein Parameterwert t entspricht. Wir betrachten dann die von K begrenzte Sektorfl¨ ache.
Satz 7.1.3 (Leibnizsche Sektorformel) Der Inhalt der durch K begrenz- ten Sektorfl¨ ache betr¨ agt
F = 1 2
Z
b a[x(t) ˙ y(t) − y(t) ˙ x(t)]dt
Satz 7.1.4 (Sektorformel in Polarkoordinaten) Der Inhalt der durch K begrenzten Sektorfl¨ ache betr¨ agt in Polarkoordinaten
F = 1 2
Z
β αr(ϕ)
2dϕ
Beispiel 7.1.7 (1) Der Fl¨ acheninhalt des Ellipsensektors t 7→
a cos t b sin t
0 ≤ t ≤ π 2
betr¨ agt nach der Leibnizschen Sektorformel:
F
1= 1 2
Z
π20
[ab cos
2t + ab sin
2t]dt = ab π
4 .
Also ist der Fl¨ acheninhalt der Ellipse gleich F = abπ.
(2) F¨ ur 0 ≤ ϕ ≤ 2π begrenzt die Archimedische Spirale r = aϕ eine Sektor- fl¨ ache mit dem Inhalt
F = 1 2
Z
2π 0a
2ϕ
2dϕ = 4 3 a
2π
3.
7.2 Kurven im R n
F¨ ur ebene Kurven haben wir verschiedene Darstellungsarten kennengelernt:
• abschnittsweise explizite Darstellung als Graph y = f(x) einer Funkti- on
• implizite Darstellung F (x, y) = 0
• Parameterdarstellung t 7→
x(t) y(t)
• Polardarstellung r = r(ϕ)
F¨ ur die allgemeine Behandlung von Kurven, insbesondere auch von Raum- kurven, eignet sich am besten die Parameterdarstellung.
Wir betrachten nun eine auf einem Intervall I ⊆ R erkl¨ arte vektorwertige Funktion
~ x : I −→ R
nt 7−→ ~ x(t) =
x
1(t) x
2(t)
.. . x
n(t)
Die Funktionen x
i: I → R , t 7→ x
i(t), heißen die Komponentenfunktionen von ~ x(t).
Die grundlegenden Begriffe der Analysis lassen sich nun auf solche Funk- tionen verallgemeinern, indem man sie komponentenweise erkl¨ art:
Definition
t→t
lim
0
x
1(t) x
2(t)
.. . x
n(t)
=
c
1c
2.. . c
n
:⇔ lim
t→t0
x
i(t) = c
i(1 ≤ i ≤ n)
Definition Eine Funktion ~ x : I → R
nheißt
stetig
differenzierbar
in t
0∈ I auf I
:⇔ alle Komponentenfunktionen sind
stetig
differenzierbar
in t
0∈ I auf I
.
~ ˙
x(t) = d
dt ~ x(t) := lim
h→0
1
h [~ x(t + h) − ~ x(t)] =
˙ x
1(t)
˙ x
2(t)
.. .
˙ x
n(t)
Wie im ebenen Fall heißt ˙ ~ x(t) der Tangentialvektor von ~ x an der Stelle t ∈ I.
Die geometrische und kinematische Interpretation ist die gleiche wie im Fall von ebenen Kurven.
Man hat folgende
Ableitungsregeln (~ x, ~ y : I → R
n, α, β ∈ R ) (a) d
dt (α~ x(t) + β~ y(t)) = α ~ x(t) + ˙ β ~ y(t) (Linearit¨ ˙ at).
(b) d
dt [~ x(t) · ~ y(t)] = ˙ ~ x(t) · ~ y(t) + ~ x(t) · ~ y(t) (Produktregel f¨ ˙ ur das Skalarpro- dukt)
(c) n = 3: d
dt [~ x(t) × ~ y(t)] = ˙ ~ x(t) × ~ y(t) + ~ x(t) × ~ y(t) (Produktregel f¨ ˙ ur das Vektorprodukt)
(d) d
dt [α(t)~ y(t)] = ˙ α(t)~ y(t) + α(t) ˙ ~ y(t) (Produktregel f¨ ur die Multiplikation mit einer skalaren Funktion).
Ubungsaufgabe 7.2.1 ¨ Man zeige
|~ x(t)| = const. f¨ ur t ∈ I ⇒ ~ x(t) ⊥ ~ x(t) f¨ ˙ ur t ∈ I.
Beweis.
|~ x(t)| = const. ⇒ ~ x(t) · ~ x(t) = |~ x(t)|
2= const.
⇒ d
dt ~ x(t) · ~ x(t) = 2 ˙ ~ x(t) · ~ x(t) = 0
⇒ ~ x(t) ˙ ⊥ ~ x(t)
2
Definition Ein Kurvenst¨ uck im R
nist eine stetig differenzierbare Funktion
~ x : [a, b] → R
noder auch das Bild {~ x(t) | a ≤ t ≤ b} einer solchen Funktion.
Der Punkt ~ x(a) heißt Anfangspunkt, ~ x(b) Endpunkt des Kurvenst¨ ucks. Ein Kurvenst¨ uck ~ x heißt regul¨ ar, wenn ˙ ~ x(t) 6= ~ 0 f¨ ur alle t ∈ [a, b] gilt. Ein Punkt
~ x(t) mit ˙ ~ x(t) = ~ 0 heißt singul¨ arer Punkt des Kurvenst¨ ucks.
Es sei nun ~ x : [a, b] → R
3ein regul¨ ares Kurvenst¨ uck im R
3, t ∈ [a, b]. F¨ ur die Bogenl¨ ange des Kurvenst¨ ucks ¨ uber [a, b] gilt:
s(t) = Z
ba
~ ˙ x(t)
dt.
Nach dem Hauptsatz der Differential- und Integralrechnung gilt ds
dt = ˙ s(t) =
~ ˙ x(t)
.
Definition Es sei nun ~ x hinreichend oft differenzierbar. Wir definieren nun T ~ (t) := 1
~ x(t) ˙
~ ˙
x(t) Tangenten(einheits)vektor
F¨ ur T ~ ˙ (t) 6= ~ 0 setzen wir N ~ (t) := 1
~ ˙ T (t)
~ ˙
T (t) Hauptnormalen(einheits)vektor
B ~ (t) := T ~ (t) × N ~ (t) Binormalen(einheits)vektor
Nach der obigen ¨ Ubungsaufgabe stehen die Vektoren N ~ (t) und T ~ (t) zu jeder Parameterstelle t senkrecht aufeinander. Deswegen bildet
( T ~ (t), ~ N (t), ~ B(t))
eine Orthonormalbasis des R
3. Man nennt dieses Tripel von Vektoren das begleitende Dreibein der Kurve an der Parameterstelle t. Die von T ~ (t) und N ~ (t) aufgespannte Ebene durch ~ x(t),
~ r = ~ x(t) + λ ~ T (t) + µ ~ N (t), λ, µ ∈ R ,
heißt die Schmiegebene der Kurve zum Parameterwert t. Sie ist der Grenzwert der Ebenen durch ~ x(t) und zwei weitere Kurvenpunkte.
Die Kr¨ ummung einer ebenen Kurve hatten wir eingef¨ uhrt als die ¨ Anderung der Tangentenrichtung bezogen auf die ¨ Anderung ∆s der Bogenl¨ ange. Die Anderung der Tangentenrichtung wurde in diesem Fall durch die ¨ ¨ Anderung des Winkels der Tangente ∆ϕ gegeben. Im allgemeinen Fall m¨ ussen wir die Anderung des Tangentenvektors ¨
∆ T ~ = T ~ (t + ∆t) − T ~ (t) auf dem Intervall [t, t + ∆t] betrachten. Wir definieren Definition
∆t→0
lim 1
∆s ∆ T ~ = 1
˙ s(t)
~ ˙
T (t) Kr¨ ummungsvektor
κ(t) := 1
˙ s(t)
~ ˙ T (t)
=
~ ˙ T (t)
~ x(t) ˙
Kr¨ ummung
F¨ ur die Darstellung von ˙ ~ x und ¨ ~ x im begleitenden Dreibein ( T , ~ ~ N , ~ B) erh¨ alt man
~ ˙ x(t) =
~ x(t) ˙
T ~ (t) = ˙ s(t) T ~ (t)
~ ¨
x(t) = d
dt ( ˙ s(t) T ~ (t))
= ¨ s(t) T ~ (t) + ˙ s(t) T ~ ˙ (t) = ¨ s(t) T ~ (t) + ˙ s(t)
~ ˙ T (t)
N(t) ~
= ¨ s(t) T ~ (t) + ˙ s(t)
2κ(t) N ~ (t),
also
~ ˙
x(t) = s(t) ˙ T ~ (t)
~ ¨
x(t) = ¨ s(t) T ~ (t) + ˙ s(t)
2κ(t) N ~ (t) Kinematische Deutung
~ x : [a, b] → R
3beschreibt die Bewegung eines Massenpunktes
• ~ x(t) = ˙ ˙ s(t) T ~ (t) Geschwindigkeitsvektor, tangential zur Bahn
•
~ x(t) ˙
= ˙ s(t) Momentangeschwindigkeit
Die Vektoren ˙ ~ x(t) und ¨ ~ x(t) haben bez¨ uglich der Basis ( T , ~ ~ N ) der Schmieg- ebene die Koordinaten
~ ˙ x(t) =
s(t) ˙ 0
, ~ x(t) = ¨
s(t) ¨
˙
s(t)
2κ(t)
. Satz 7.1.2 ergibt f¨ ur die Kr¨ ummung in der Schmiegebene
κ
s(t) = s(t) ˙ · s(t) ˙
2κ(t) − 0 · s(t) ¨
p ( ˙ s(t)
2)
3= κ(t).
Es folgt 1
κ(t) = Radius eines Kr¨ ummungskreises in der Schmiegebene Weiter berechnen wir
~ x(t) ˙ × ~ x(t) = ¨
˙
s(t) T ~ (t)
×
¨
s(t) T ~ (t) + ˙ s(t)
2κ(t) N ~ (t)
= s(t)¨ ˙ s(t) T ~ (t) × T ~ (t) + ˙ s(t)
3κ(t) T ~ (t) × N ~ (t)
= s(t) ˙
3κ(t) B ~ (t)
~ x(t) ˙ × ~ x(t) ¨
= s(t) ˙
3κ(t) (da
B(t) ~ = 1) Also folgt
κ(t) =
~ ˙
x(t) × ~ x(t) ¨
~ ˙ x(t)
3
B(t) = ~ 1
~ x(t) ˙ × ~ x(t) ¨
~ ˙
x(t) × ~ x(t) ¨ (falls
~ ˙
x(t) × ~ x(t) ¨
6= 0)
F¨ ur eine ebene Kurve
~ x(t) =
x(t) y(t) 0
ergibt die Formel f¨ ur κ
κ =
˙ x
˙ y 0
×
¨ x
¨ y 0
p ( ˙ x
2+ ˙ y
2)
3= | x¨ ˙ y − y¨ ˙ x|
p ( ˙ x
2+ ˙ y
2)
3Dies ist bis auf das Vorzeichen die Formel von Satz 7.1.2(a). (Nur falls ˙ x¨ y −
˙
y¨ x > 0 haben ~ n und N ~ die gleiche Richtung!)
Aufgrund der Formel f¨ ur B ~ (t) bestimmt man das begleitende Dreibein ( T , ~ ~ N , ~ B) in der Reihenfolge
T ~ = 1
~ ˙ x
~ ˙ x,
B ~ = 1
~ ˙ x × ~ x ¨
~ ˙ x × ~ x, ¨ N ~ = B ~ × T . ~
Bei Raumkurven kommt zus¨ atzlich zu der Kr¨ ummung eine weitere Gr¨ oße ins Spiel, die Torsion. Sie beschreibt das Herauswinden der Kurve aus der Schmiegebene. Dies wird durch die ¨ Anderungsrate des Binormalenvektors, bezogen auf die Bogenl¨ ange, gemessen:
Definition Der Vektor
∆t→0
lim 1
∆s [ B(t ~ + ∆t) − B(t)] = ~ 1
˙ s(t)
~ ˙ B(t) heißt der Torsionsvektor.
Nach der ¨ Ubungsaufgabe ist wegen | B(t)| ~ = 1 der Vektor B ~ ˙ orthogonal zu B. Aus ~
~ ˙ B = d
dt ( T ~ × N ~ ) = T ~ ˙ × N ~ + T ~ × N ~ ˙ = T ~ × N ~ ˙ folgt auch B ~ ˙ ⊥ T ~ , also B ~ ˙ k N ~ . Deshalb gibt es ein τ(t) mit
1
˙ s(t)
~ ˙
B(t) = −τ (t) N ~ (t).
Definition Die Zahl τ(t) heißt die Torsion der Kurve zum Parameterwert t.
Es gilt
τ = − 1
˙ s
~ ˙ B · N ~
= 1
˙ s
B ~ · N ~ ˙ ( B ~ · N ~ = 0 ⇒ B ~ ˙ · N ~ + B ~ · N ~ ˙ = 0)
= 1
˙ s
B ~ · 1
˙ s
2κ
...
~ x
aus d dt
~ ¨ x = d
dt (¨ s ~ T + ˙ s
2κ ~ N )
=
1
˙ s
1
~ x ˙ × ~ x ¨
~ ˙ x × ~ x ¨
· 1
˙ s
2κ
...
~ x
=
h ~ x, ˙ ~ x, ¨ ...
~ x i
~ x ˙ × ~ x ¨
2
Also erhalten wir
τ (t) =
h ~ x(t), ˙ ~ x(t), ¨ ...
~ x (t) i
~ ˙
x(t) × ~ x(t) ¨
2
Wir fassen die Resultate in einem Satz zusammen
Satz 7.2.1 Eine dreimal stetig differenzierbare Kurve ~ x : [a, b] → R
3besitzt f¨ ur jeden Parameterwert t mit ~ x ˙ × ~ x(t) ¨ 6= 0
Tangentenvektor T ~ (t) = 1
~ ˙ x(t)
~ ˙ x(t) Binormalenvektor B ~ (t) = 1
~ ˙
x(t) × ~ x(t) ¨
~ x(t) ˙ × ~ x(t) ¨ Hauptnormalenvektor N ~ (t) = B(t) ~ × T ~ (t)
Kr¨ ummung κ(t) =
~ ˙
x(t) × ~ x(t) ¨
~ ˙ x
3
Torsion τ (t) =
h ~ x(t), ˙ ~ x(t), ¨ ...
~ x (t) i
~ ˙
x(t) × ~ x(t) ¨
2
Beispiel 7.2.1 (Schraubenlinie) Die neutrale Faser einer Schraubenfeder ist eine Schraubenlinie und besitzt die Parameterdarstellung
~ x(t) =
r cos t r sin t
ht
(0 ≤ t ≤ 2πn)
(r Radius, 2πh Gangh¨ ohe, n Windungszahl).
x y
2πh r
z
Es gilt
~ x(t) = ˙
−r sin t r cos t
h
, ~ x(t) = ¨
−r cos t
−r sin t 0
, ...
~ x =
r sin t
−r cos t 0
.
Wir setzen zur Abk¨ urzung
R :=
~ ˙ x(t)
= √
r
2+ h
2Damit errechnet man T ~ (t) = 1
R
−r sin t r cos t
h
~ ˙
x(t) × ~ x(t) = ¨
−r sin t r cos t
h
×
−r cos t
−r sin t 0
=
rh sin t
−rh cos t r
2
B(t) = ~ 1 R
h sin t
−h cos t r
N ~ (t) = 1 R
2
h sin t
−h cos t r
×
−r sin t r cos t
h
=
− cos t
− sin t 0
κ(t) = r
r
2+ h
2τ (t) = 1
r
2(r
2+ h
2)
−r sin t −r cos t r sin t r cos t −r sin t −r cos t
h 0 0
= h
r
2+ h
2Man beachte, dass κ(t) und τ (t) konstant sind.
Funktionen mehrerer Ver¨ anderlicher
8.1 Differentiation
Wir wollen nun Funktionen mehrerer Ver¨ anderlicher betrachten.
Es sei D ⊆ R
n. Eine reellwertige Funktion ist eine Funktion
f : D −→ R
~ x =
x
1x
2.. . x
n
7−→ f (~ x) = f (x
1, . . . , x
n) =: z
Eine reellwertige Funktion f : D → R wird auch als Skalarenfeld bezeichnet (einem ~ x ∈ D wird eine skalare physikalische Gr¨ oße, z.B. H¨ ohe, Temperatur, zugeordnet).
Die Funktion f kann gegeben sein
• durch eine explizite Vorschrift, z.B. f (x, y) = 3 − x
2.
• durch eine implizite Gleichung, z.B. f (x, y) ist die positive L¨ osung von x
2+ y
2+ z
2= 1 (D = {(x, y) ∈ R
2| x
2+ y
2< 1})
Der Graph von f : D → R ist die Menge
Γ
f:= {(~ x, z) ∈ D × R | z = f(~ x)} ⊆ R
n+1.
Um eine Funktion f : D → R zu beschreiben, betrachtet man auch
25
• die Niveaumengen (Niveaukurven, Niveaufl¨ achen) von f zum Niveau c ∈ R :
N
c:= {~ x ∈ D | f (~ x) = c}.
• die ”partiellen” Funktionen
x
i7→ f (a
1, . . . , a
i−1, x
i, a
i+1, . . . , a
n)
mit ~a = (a
1, . . . , a
n)
T∈ D (definiert auf einer zu der i-ten Koordina- tenachse parallelen Geraden).
Anschauliche Darstellung im Fall n = 2
Im Fall n = 2 schreiben wir auch f(x, y). Der Graph Γ
f= {(x, y, z) ∈ R
3| z = f (x, y)} ⊆ R
3ist eine Fl¨ ache im R
3. Sie wird beschrieben durch
(a) Blockbild (b) H¨ ohenkarte (a) Blockbild
Beispiel: f(x, y) = 3 − x
2auf D = {(x, y) ∈ R
2| |x| ≤ 1, |y| ≤ 1}
y
x
Zur Erstellung eines Blockbildes muss man die Graphen der partiellen Funk-
tionen z = f (a
1, y) bzw. z = f (x, a
2) bestimmen.
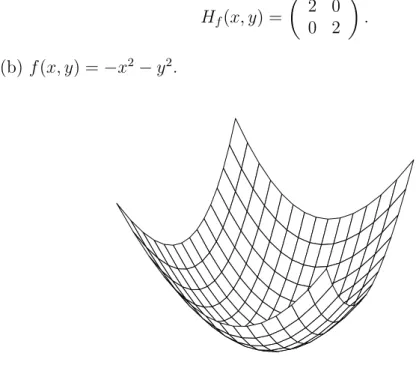
(b) H¨ ohenkarte
Beispiel: f (x, y) = 1 − x
2− y
2x y
Die Funktion kann auch durch ihre Niveaukurven N
c= {(x, y) ∈ D | f (x, y) = c} (H¨ ohenlinien einer Landkarte) veranschaulicht werden.
Wir wollen nun Grenzwerte solcher Funktionen betrachten. Dazu brau- chen wir ein Maß f¨ ur den Abstand zweier Punkte des R
n.
Der Abstand zweier Punkte ~ x, ~ y ∈ R
nist definiert durch
|~ x − ~ y| = v u u t
n
X
i=1
(x
i− y
i)
2.
Die Definitionsmengen von Funktionen einer Ver¨ anderlichen waren meistens Intervalle. Dabei machte es f¨ ur viele Betrachtungen einen Unterschied, ob wir uns im Innern des Intervalls oder in einem Randpunkt befanden. Zur Beschreibung der Definitionsmengen im R
nbrauchen wir einige topologische Begriffe.
Definition Es sei ~a ∈ R
n, ε > 0. Die Menge
U
ε(~a) := { ~ x ∈ R
n| |~ x − ~a| < ε}
heißt ε-Umgebung von ~a.
Beispiel 8.1.1 n = 1: U
ε(a) := (a − ε, a + ε)
n = 2: U
ε(~a) ist eine Kreisscheibe vom Radius ε um ~a ohne Rand.
n = 3: U
ε( ~a) ist eine Kugel um ~a vom Radius ε ohne Punkte auf der Ober-
fl¨ ache.
Definition Es sei D ⊆ R
n.
(a) Ein Punkt ~a ∈ D heißt innerer Punkt von D, wenn es eine ε-Umgebung von ~a gibt, die ganz in D enthalten ist.
(b) D heißt offen, wenn jeder Punkt von D ein innerer Punkt ist.
(c) Ein ~b ∈ R
nheißt Randpunkt von D, wenn jede ε-Umgebung U
ε( ~b) von ~b mindestens einen Punkt aus D und mindestens einen Punkt nicht aus D enth¨ alt.
(d) Die Menge aller Randpunkte von D heißt Rand von D, in Zeichen ∂D.
(e) D heißt abgeschlossen, wenn sie alle ihre Randpunkte enth¨ alt.
(f) D heißt beschr¨ ankt, wenn es eine Konstante K > 0 gibt mit
|~ x| < K f¨ ur alle ~ x ∈ D.
(g) D heißt kompakt, wenn D beschr¨ ankt und abgeschlossen ist.
Beispiel 8.1.2 Die Kreisscheibe (ohne Rand)
K
r= {(x, y) ∈ R
2| (x − x
0)
2+ (y − y
0)
2< r
2} ist eine offene Menge. Rand:
∂K
r= {(x, y) ∈ R
2| (x − x
0)
2+ (y − y
0)
2= r
2}.
Die Menge
K = K
r∪ ∂K
r= {(x, y) ∈ R
2| (x − x
0)
2+ (y − y
0)
2≤ r
2} ist abgeschlossen und beschr¨ ankt, also kompakt.
Warnung Es gibt Mengen, die weder offen noch abgeschlossen sind, z.B.
halboffene Intervalle, R = {(x, y) ∈ R
2| 0 ≤ x < 1, 0 ≤ y ≤ 1}.
Definition Eine Folge (~ x
k)
k∈N, ~ x
k∈ R
n, heißt konvergent gegen ~a ∈ R
n, in Zeichen
k→∞
lim ~ x
k= ~a oder ~ x
k→ ~a f¨ ur k → ∞, wenn gilt:
k→∞
lim |~ x
k− ~a| = 0.
Beispiel 8.1.3 Die Folge
~ x
k=
2πk
cos
2πk2π k
sin
2πkliegt auf der Archimedischen Spirale und konvergiert gegen 0.
Definition Es sei D ⊆ R
n, f : D → R , ~a ∈ D ∪ ∂D.
(a) f hat in ~a den Grenzwert c ∈ R , in Zeichen lim
~x→~a
f (~ x) = c oder f(~ x) → c f¨ ur ~ x → ~a,
wenn f¨ ur jede Folge (~ x
k)
k∈Naus D mit ~ x
k→ ~a und ~ x
k6= ~a f¨ ur alle k die Folge (f (~ x
k))
k∈Ngegen c strebt.
(b) f heißt stetig in ~a ∈ D :⇔ lim
~x→~a
f(~ x) = f(~a).
(c) f heißt stetig auf D, wenn f in jedem ~a ∈ D stetig ist.
Da die Definitionen v¨ ollig analog zu den Definitionen im Fall einer Va- riablen sind, ¨ ubertragen sich die Rechenregeln f¨ ur Grenzwerte und stetige Funktionen aus Kapitel 3. Insbesondere sind Summe, Produkt, Quotient ste- tiger Funktionen stetig.
Beispiel 8.1.4 Die Projektionen
p
i: R
n−→ R
~ x =
x
1.. . x
i.. . x
n
7−→ x
isind stetig und damit auch jedes Polynom in n Variablen p(~ x) = X
0≤ki≤m .. . 0≤kn≤m
α
k1k2...knx
k11x
k22· · · x
knn(z.B. p(x, y) = α
10x + α
01y + α
20x
2+ α
11xy + α
02y
2).
Warnung Die Stetigkeit von f (x, y ) ergibt sich nicht aus der Stetigkeit der partiellen Funktionen x 7→ f (x, y
0), y 7→ f(x
0, y). Gegenbeispiel:
f : R
2−→ R
x y
7−→ f(x, y) :=
2xy
x
2+ y
2, (x, y) 6= (0, 0) 0, (x, y) = (0, 0) Es gilt
f (x, 0) = f(0, y) = 0, f(x, x) = 1, f(x, −x) = −1.
Bei Ann¨ aherung von ~ 0 auf der x- oder y-Achse ergibt sich als Grenzwert 0, bei Ann¨ aherung auf den Geraden y = x und y = −x der Grenzwert 1 bzw.
−1. Also ist f nicht stetig in 0.
Wir kommen nun zur Frage der Differenzierbarkeit von Funktionen meh- rerer Ver¨ anderlicher.
Definition Es sei D ⊆ R
noffen, f : D → R , ~a =
a
1.. . a
n
∈ D. Wir betrachten die partielle Funktion
x
i7→ f(a
1, . . . , a
i−1, x
i, a
i+1, . . . , a
n).
Existiert die Ableitung dieser Funktion an der Stelle x
i= a
i, so nennt man diese die partielle Ableitung von f nach x
iin ~a, in Zeichen
∂f
∂x
i(~a) oder ∂f (~ x)
∂x
i~x=~a
, f
xi, also
∂f
∂x
i(~ x) := lim
t→0
f (x
1, . . . , x
i+ t, . . . , x
n) − f (x
1, . . . , x
i, . . . , x
n) t
= lim
t→0
f (~ x + t~ e
i) − f (~ x) t
(Ableiten nach x
i(variabel), andere Variablen als konstant ansehen.) Beispiel 8.1.5 f (x, y) = x
3sin y + e
xy
2.
∂f
∂x (x, y ) = 3x
2sin y + e
xy
2, ∂f
∂y (x, y) = x
3cos y + 2e
xy.
Definition f heißt partiell differenzierbar, wenn alle partiellen Ableitungen f
xiexistieren.
Ist f partiell differenzierbar, so fasst man die partiellen Ableitungen zu einem Vektor zusammen. Diesen Vektor schreibt man zweckm¨ aßig als Zeilen- vektor.
Definition Der Vektor grad f (~ x) :=
∂f
∂x
1(~ x), ∂f
∂x
2(~ x), . . . , ∂f
∂x
n(~ x)
heißt der Gradient von f in ~ x.
Die Funktion ~ x 7→ grad f(~ x) ist eine vektorwertige Funktion (ein Vektor- feld): jedem ~ x ∈ D wird der Vektor grad f(~ x) ∈ R
nzugeordnet.
Beispiel 8.1.6 f(x, y) = x
3sin y + e
xy
2.
grad f (x, y) = (3x
2sin y + e
xy
2, x
3cos y + 2e
xy).
Man kann nun auch h¨ ohere partielle Ableitungen betrachten.
Notation (f(x, y)) f
xx= ∂
2f
∂x
2, f
xy= ∂
∂y ∂f
∂x
= ∂
2f
∂y∂x , f
yy= ∂
2f
∂y
2. Beispiel 8.1.7 f(x, y) = x
3sin y + e
xy
2.
∂
2f
∂x
2(x, y) = 6x sin y + e
xy
2, ∂
2f
∂y∂x (x, y) = 3x
2cos y + 2e
xy,
∂
2f
∂x∂y (x, y) = 3x
2cos y + 2e
xy, ∂
2f
∂y
2(x, y) = −x
3sin y + 2e
x. Warnung In diesem Beispiel gilt ∂
2f
∂y∂x = ∂
2f
∂x∂y . Das braucht aber nicht der Fall zu sein. Gegenbeispiel:
f : R
2−→ R
x y
7−→ f (x, y) :=
xy x
2− y
2x
2+ y
2, (x, y) 6= (0, 0) 0, (x, y) = (0, 0) Es gilt
f (x, 0) = f(0, y) = 0 ⇒ f
x(0, 0) = f
y(0, 0) = 0.
f
x= y x
2− y
2x
2+ y
2+ xy 2x(x
2+ y
2) − 2x(x
2− y
2) (x
2+ y
2)
2= y
x
2− y
2x
2+ y
2+ 4x
2y
2(x
2+ y
2)
2, (x, y) 6= (0, 0) f
y= x
x
2− y
2x
2+ y
2− 4x
2y
2(x
2+ y
2)
2, (x, y) 6= (0, 0).
Daraus folgt
f
xy(0, 0) = lim
y→0
f
x(0, y) − f
x(0, 0)
y = lim
y→0
−y
3y
3= −1, f
yx(0, 0) = lim
x→0
f
y(x, 0) − f
y(0, 0)
x = lim
x→0
x
3x
3= 1.
Es gilt aber der folgende Satz:
Satz 8.1.1 (Schwarz; Vertauschbarkeit der partiellen Ableitungen) F¨ ur jede Funktion f : D → R , D ⊆ R
noffen, deren zweite partielle Ablei- tungen existieren und stetig sind, gilt
∂
∂x
i∂f
∂x
j= ∂
∂x
j∂f
∂x
i(1 ≤ i, j ≤ n).
Neben dem Begriff der partiellen Differenzierbarkeit gibt es f¨ ur Funktio- nen mehrerer Ver¨ anderlicher auch den Begriff der totalen Differenzierbarkeit.
Dabei geht man von der Deutung der Ableitung als lineare Approximation aus. Zur Beschreibung der G¨ ute der Approximation f¨ uhren wir folgendes Symbol ein.
Definition (Definition des o-Symbols) F¨ ur f, g : D → R , D ⊆ R
n,
~ x
0∈ D, k ∈ N , schreibt man
f (~ x) = g(~ x) + o(|~ x − ~ x
0|
k) (f¨ ur ~ x → ~ x
0), falls
lim
~x→~x0
f (~ x) − g(~ x)
|~ x − ~ x
0|
k= 0.
also
f(~ x) = g(~ x) + o(|~ x − ~ x
0|
k) ⇔ lim
~x→~x0
f(~ x) − g(~ x)
|~ x − ~ x
0|
k= 0.
Die Gleichung f (~ x) = g(~ x) + o(|~ x − ~ x
0|
k) besagt: Der bei der Approxima-
tion von f durch g in der N¨ ahe von ~ x
0gemachte Fehler f (~ x) − g (~ x) ist klein
im Vergleich zu |~ x − ~ x
0|
k.
Beispiel 8.1.8 Es sei I ⊆ R ein offenes Intervall, f : I → R eine differen- zierbare Funktion, x
0∈ I. Dann gilt
f (x) = f (x
0) + f
0(x
0)(x − x
0) + o(|x − x
0|).
Definition Es sei D ⊆ R
noffen. Eine Funktion f : D → R heißt in ~ x
0∈ D total differenzierbar, wenn es einen Vektor ~a ∈ R
ngibt mit
f(~ x) = f (~ x
0) + ~a · (~ x − ~ x
0) + o(|~ x − ~ x
0|) f¨ ur ~ x → ~ x
0.
Warnung Aus der partiellen Differenzierbarkeit folgt nicht die totale Dif- ferenzierbarkeit!
Satz 8.1.2 Es sei f in ~ x
0∈ D total differenzierbar, f(~ x) = f(~ x
0) + ~a · (~ x − ~ x
0) + o(|~ x − ~ x
0|).
Dann ist f partiell differenzierbar und es gilt
~a = grad f (~ x
0).
Nach Satz 8.1.2 gilt also: Ist f in ~ x
0∈ D total differenzierbar, so gilt f (~ x) = f(~ x
0) + grad f(~ x
0) · (~ x − ~ x
0) + o(|~ x − ~ x
0|) f¨ ur ~ x → ~ x
0.
Dies ist der Grund, weshalb man grad f(~ x
0) ¨ ublicherweise als Zeilenvektor schreibt.
Anschauliche Deutung f¨ ur n = 2
Die Fl¨ ache (Graph) z = f (x, y) wird in der N¨ ahe von (x
0, y
0, f(x
0, y
0)) durch die Ebene
z = f (x
0, y
0) + f
x(x
0, y
0)(x − x
0) + f
y(x
0, y
0)(y − y
0)
mit einem Fehler o( p
(x − x
0)
2+ (y − y
0)
2) approximiert. Diese Ebene heißt Tangentialebene der Fl¨ ache z = f ((x, y) in (x
0, y
0, f(x
0, y
0)).
Die Tangentialebene enth¨ alt alle Fl¨ achentangenten in dem Punkt.
Satz 8.1.3 (stetig partiell diffbar ⇒ total diffbar) Es sei D ⊆ R
nof- fen. Ist f : D → R auf D partiell differenzierbar und sind alle partiellen Ableitungen stetig, so ist f auf D total differenzierbar.
Beispiel 8.1.9 f (x, y) = 3 − x
2− y
2. (a) (x
0, y
0) = (0, 0):
f (x, y) = 3 + (0, 0) · x
y
+ o( p
x
2+ y
2).
Gleichung der Tangentialebene in (0, 0, 3): z = 3 (b) (x
0, y
0) = (1, 1):
f (x, y) = 1 + (−2, −2) ·
x − 1 y − 1
+ o( p
(x − 1)
2+ (y − 1)
2).
Gleichung der Tangentialebene in (1, 1, 1):
z = 1 − 2(x − 1) − 2(y − 1).
Bemerkung 8.1.1 F¨ ur eine erste N¨ aherung wird der o-Anteil vernachl¨ assigt und f(~ x) in der N¨ ahe von ~ x
0durch f (~ x
0) + grad f (~ x
0) · (~ x − ~ x
0) ersetzt:
f (~ x) ≈ f (~ x
0) + grad f (~ x
0) · (~ x − ~ x
0).
8.2 Richtungsableitung
Die partiellen Ableitungen ∂f
∂x
i(~ x) geben die ¨ Anderung der Funktionswer- te in Richtung der Kordinatenachsen (d.h. in ~ e
i-Richtung) an. Allgemeiner definiert man:
Definition Es sei ~ v ∈ R
n, |~ v| = 1. Dann heißt der Grenzwert
∂
~vf (~ x) := lim
t→0
f (~ x + t~ v) − f (~ x) t
(falls er existiert) die Richtungsableitung (oder der Anstieg) von f an der Stelle ~ x in Richtung ~ v .
Notation Andere Bezeichnungen: D
~vf (~ x), ∂f
∂~ v (~ x).
Anschauliche Deutung f¨ ur n = 2
Betrachte die Schnittkurve des Graphen z = f(x, y) mit der zur z-Achse parallelen Ebene durch die Gerade
~
x
0+ t~ v = x
0y
0+ t v
1v
2, |~ v | = 1.
Diese Kurve besitzt die Parameterdarstellung
~ x(t) =
x
0+ tv
1y
0+ tv
2f (x
0+ tv
1, y
0+ tv
2)
.
Der Tangentialvektor im Punkte (x
0, y
0, f(x
0, y
0)) lautet:
~ ˙ x(t) =
v
1v
2∂
~vf(x
0, y
0)
. Die Tangente hat die Steigung ∂
~vf (x
0, y
0).
Physikalische Deutung
Wir betrachten eine ebene Platte mit einer Druckverteilung p = f (x, y) und einen Querschnitt durch die Platte durch den Punkt (x
0, y
0). Die momentane Druck¨ anderung l¨ angs dieses Querschnitts in (x
0, y
0) wird durch ∂
~vf(x
0, y
0) gegeben.
Satz 8.2.1 Es sei D ⊆ R
noffen, f : D → R total differenzierbar, ~ v ∈ R
n,
|~ v| = 1. Dann gilt
∂
~vf(~ x) = grad f (~ x) · ~ v =
n
X
i=1