Der Satz von Sard
Jonathan Gantner
0725250
5. Oktober 2010
Inhaltsverzeichnis
1 Definitionen 2
1.1 Differenzierbare Mannigfaltigkeiten . . . 2 1.2 Mengen vom Maß null . . . 6
2 Der Satz von Sard 9
3 Verallgemeinerte Transformationsformel 19
Kapitel 1
Definitionen
1.1 Differenzierbare Mannigfaltigkeiten
Gegenstand dieser Arbeit ist der Satz von Sard - um ihn zu verstehen ben¨otigen wir einige Definitionen und Ergebnisse aus der Differentialgeometrie.
Definition 1.1 (Mannigfaltigkeit). Eine n-dimensionale Mannigfaltigkeit M ist ein to- pologischer Hausdorff-Raum mit abz¨ahlbarer Basis der Topologie, der lokal hom¨oomorph zum Rn ist — das heißt zu jedem Punkt p ∈ M gibt es eine offene Umgebung U von p und einen Hom¨oomorphismus h:U →U′, sodass U′ ⊂Rn und offen ist.
So ein Hom¨oomorphismus von einer offenen Menge U ⊂ M auf eine offene Menge U′ ⊂Rn heißt Karte von M, U das zugeh¨orige Kartengebiet.
Eine Menge von Karten {hi |i∈I} mit S
i∈IUi =M heißt Atlas von M.
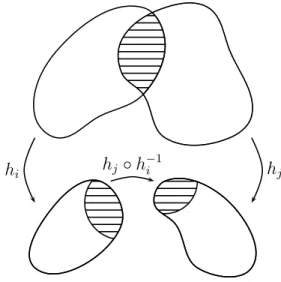
Zu zwei verschiedenen Karten (Ui, hi) und (Uj, hj) l¨asst sich auf dem Durchschnitt Ui∩Uj der Kartengebiete ein Kartenwechsel hij =hj ◦h−i 1 vonhi(Ui∩Uj)→hj(Ui∩Uj) definieren. Dieser ist als Zusammensetzung von zwei Hom¨oomorphismen selbst wieder ein Hom¨oomorphismus zwischen zwei offenen Teilmengen des Rn.
Definition 1.2(differenzierbare Mannigfaltigkeit). Ein Atlas einer Mannigfaltigkeit heißt differenzierbar, wenn alle seine Kartenwechsel differenzierbar sind.
Eine differenzierbare Struktur ist ein bez¨uglich der Hinzunahme weiterer Karten maxi- maler differenzierbarer Atlas.
Ein Paar (M,F) bestehend aus einer Mannigfaltigkeit M und einer differenzierbaren Struktur F heißt differenzierbare Mannigfaltigkeit.
Eine differenzierbare Struktur auf einer Mannigfaltigkeit ist also ein Atlas, dem keine weiteren Karten mehr hinzugef¨ugt werden k¨onnen, ohne dass Kartenwechsel entstehen, die nicht mehr differenzierbar sind. Es reicht deshalb einen weitaus kleineren Atlas an- zugeben, um eine differenzierbare Struktur vollst¨andig zu definieren. Offensichtlich gilt n¨amlich:
hii= Id, hjk◦hij =hik und damit auch h−ij1 =hji. (1.1) Hat man nun einen differenzierbaren AtlasAgegeben, so seiD(A) die Menge aller Karten, f¨ur die jeder Kartenwechsel mit einer Karte ausAdifferenzierbar ist. Dann istD(A) wieder
differenzierbar, denn jeder Kartenwechselhik kann zumindest lokal dargestellt werden als Zusammensetzunghik =hjk◦hij mit hj ∈A— und offensichtlich istD(A) auch maximal und kann nicht durch zus¨atzliche Karten erweitert werden. Die differenzierbare Struktur D(A) wird also durch Aeindeutig festgelegt.
hi hj ◦h−i 1 hj
Abb. 1.1: Karten einer Mannigfaltigkeit
Außerdem sind wegen (1.1) die Inversen von Kartenwechseln eines differenzierbaren Atlas wieder Kartenwechsel und somit differenzierbar — Kartenwechsel eines differenzier- baren Atlas sind also Diffeomorphismen. Umgekehrt kann auch jeder Diffeomorphismus zwischen entsprechenden Teilmengen des Rn als Kartenwechsel interpretiert werden. Ist n¨amlich (U, h) eine Karte undf ein Diffeomorphismush(U)→Ue ⊂Rn, dann ist ˜h=f◦h ein Hom¨oomorphismusU →Ue — also eine Karte — undf bzw.f−1 sind genau die Kar- tenwechsel zwischen h und ˜h.
Beispiele 1.3. 1. Jede offene Teilmenge des Rn ist offensichtlich eine n-dimensionale differenzierbare Mannigfaltigkeit. Die differenzierbare Struktur darauf wird durch den Atlas {IdU} definiert, der nur eine einzige Karte enth¨alt.
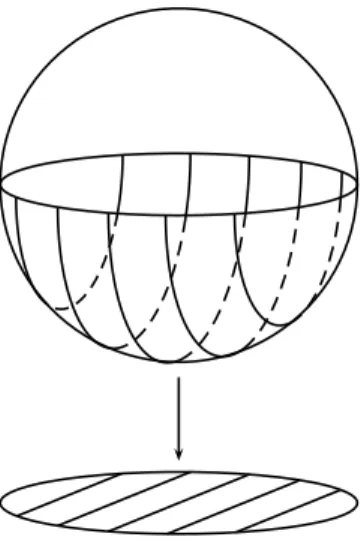
2. Die n-dimensionale Sph¨are Sn ={x∈Rn+1|p
x21+x22+. . .+x2n+1 = 1} ist eine n- dimensionale Mannigfaltigkeit. Auch auf ihr l¨asst sich durch folgende Karten eine differenzierbare Struktur definieren:
hji
(Uij ={x∈Sn|(−1)jxi >0} → U1n(0) ={x∈Rn| kxk2 <1} (x1, x2, . . . , xn+1) 7→ (x1, . . . , xi−1, xi+1, . . . , xn+1)
wobei i∈ {1, . . . , n+ 1}und j ∈ {1,2}.
Die Abbildungen hji streichen also einfach die i-te Koordinate. Umgekehrt f¨ugt die Inverse (hji)−1 einfach an deri-ten Stelle eine zus¨atzliche Koordinate mit dem Wert
Abb. 1.2: Koordinatisierung dern-dimensionalen Sph¨are
(−1)j(1−Pn
k=1x2k)12 ein. Die Kartenwechselhlk◦(hji)−1 haben dann folgende Form:
hlk◦(hji)−1 :
x1
... xi−1
xi
xi+1
... xk−1
xk
... xn
7→
x1 ... xi−1
(−1)j(1−Pn l=1x2l)12 xi
... xk−2
xk−1
...
xn−1
xn
7→
x1 ... xi−1
(−1)j(1−Pn l=1x2l)12 xi
... xk−2
xk
...
xn
.
Sie sind damit auf ihren Definitionsbereichen offensichtlich differenzierbar.
Differenzierbare Strukturen erm¨oglichen es uns nun die Differentialrechnung auf Man- nigfaltigkeiten einzuf¨uhren:
Definition 1.4 (Differenzierbare Abbildung). Seien M und N differenzierbare Mannig- faltigkeiten und ϕ : M → N eine stetige Abbildung. Dann heißt ϕ differenzierbar im Punkt p∈ M, wenn es zwei Karten (U, g) und (V, h) von M bzw. N gibt, sodass p∈ U und ϕ(p)∈V ist, und sodass h◦ϕ◦g−1 differenzierbar im Punkt g(p) ist.
Die Abbildung ϕ heißt differenzierbar, wenn sie in jedem Punkt p∈M differenzierbar ist.
Diese Definition macht Sinn, da ja die Kartenwechsel differenzierbarer Mannigfal- tigkeiten ebenfalls differenzierbar sind, und die Differenzierbarkeit einer Abbildung im
Punkt p deshalb unabh¨angig von der Wahl der Karten erhalten bleibt.
Analog definiert man Strukturen und Mannigfaltigkeiten der Klasse Ck, indem man for- dert, dass alle Kartenwechsel k-mal stetig differenzierbar sind. Eine Funktionϕ zwischen Ck-Mannigfaltigkeiten heißt k-mal stetig differenzierbar, wenn f¨ur alle Karten g und h die Darstellung h◦ϕ◦g−1 k-mal stetig differenzierbar ist. Man beachte allerdings, dass eine Funktion zwischen Ck-Mannigfaltigkeiten h¨ochstensk-mal stetig differenzierbar sein kann.
Definition 1.5. Seien M und N differenzierbare Mannigfaltigkeiten und ϕ : M → N differenzierbar und seien(U, g)und(V, h)Karten vonM bzw.N mitp∈U undϕ(p)∈V. Weiters sei f =h◦ϕ◦g−1 die Darstellung von ϕ bez¨uglich g und h. Dann ist der Rang von ϕ im Punkt p definiert als der Rang der Jacobimatrix df im Punkt g(p).
Auch der Rang von ϕ ist unabh¨angig von der Wahl der Karteng und h, wie man mit Hilfe der Kettenregel leicht sieht.
Lemma 1.6. Seien M undN zwei m−bzw. n−dimensionaleC1–Mannigfaltigkeiten und ϕeine stetig differenzierbare AbbildungM →N. Hatϕbeip∈M Rangk, dann existieren Karten (U,e eg) und (V ,e eh) mit p ∈ Ue und ϕ(p) ∈ Ve, auf die bezogen ϕ die Darstellung ψ =eh◦ϕ◦eg−1 hat mit
ψi(x1, . . . , xm) =xi f¨ur i= 1. . . k (1.2) Gilt rang ϕ =k auf einer Umgebung von p, kann man eg und eh sogar so w¨ahlen, dass ψi(x1, . . . , xm) = 0 f¨ur i > k (1.3) Beweis. Seien (U, g) und (V, h) zwei Karten mitp∈U undϕ(p)∈V und seif =h◦ϕ◦g−1 die Darstellung vonϕbez¨uglich dieser Karten. Dann hat die Jacobimatrix von f beig(p) rang k und o.B.d.A. k¨onnen wir annehmen, dass
det ∂fi
∂xj
6
= 0 i, j = 1. . . k (1.4)
— andernfalls l¨asst sich die Reihenfolge der Koordinaten mit Hilfe eines Kartenwechsels
¨andern. Betrachtet man nun die Abbildung u:
ui(x1, . . . , xm) = fi(x1, . . . , xm) i= 1. . . , k ui(x1. . . , xm) = xi i=k+ 1. . . m
dann ist die Jacobi-Matrix du im Punkt g(p) invertierbar - also existiert nach dem Satz uber die inverse Funktion eine Umgebung von¨ g(p), auf der u ein Diffeomorphismus ist und deshalb als Kartenwechsel interpretiert werden kann. Bez¨uglich der Karten h und eg =u◦g hat ϕ nun die gew¨unschte Darstellung ψ die (1.2) erf¨ullt.
Ist zus¨atzlich rang ϕ =k auf einer Umgebung W von p, dann gilt dort auch ∂ψ∂xi
j = 0
f¨ur i, j > k. Die Jacobi-Matrix von ψ hat n¨amlich die Form Ik×k 0
∂ψi
∂xji≤k<j
∂ψi
∂xji,j>k
!
W¨are also ∂ψ∂xji 6= 0 mit i, j > k, so w¨are rangψ > k — deshalb h¨angt ψ auf W nur von x1, . . . , xk ab und wir k¨onnen hier schreiben ψ =ψ(x1, . . . , xk). Betrachtet man nun die Abbildung z:
zi(y1, . . . , yn2) =yi i= 1, . . . , k zi(y1, . . . , yn2) =yi−ψi(y1, . . . , yk) i=k+ 1, . . . , n2
so sieht man leicht, dass dz im Punkt h◦ϕ(p) invertierbar ist — und mit dem Satz ¨uber die inverse Funktion folgt wieder die Existenz einer Umgebung von h◦ϕ(p), sodass z auf dieser Umgebung ein Diffeomorphismus ist. Die Darstellung ψe von ϕ bez¨uglich der Karten eg und eh =z◦eh — also ψe=eh◦ϕ◦eg−1 =z◦ψ — erf¨ullt nun zus¨atzlich (1.3).
1.2 Mengen vom Maß null
Um den Satz von Sard formulieren zu k¨onnen m¨ussen wir noch erkl¨aren, was es bedeutet, dass eine Teilmenge einer differenzierbaren Mannigfaltigkeit Maß null hat. Dazu ¨uberlegen wir zuerst, wann das Lebesgue-Maß λd einer Teilmenge des Rd null ist. Betrachtet man das Lebesgue-Maß als Vervollst¨andigung der Einschr¨ankung des nach der Borel-Lebesgue- Carath´eodory-Methode konstruierten ¨außeren Maßes auf die Borel-Mengen1, so ergibt sich die folgende
Definition 1.7. Eine Teilmenge M ⊂ Rd hat Lebesgue-Maß null, wenn f¨ur alle ε > 0 eine Folge von W¨urfeln Wnε existiert, sodass gilt
M ⊂ [∞ n=1
Wnε und
X∞ n=1
vol(Wnε)< ε (1.5) wobei vol(W)den elementaren Inhalt ad (bzw. das Lebesgue-Maß) eines d-dimensionalen W¨urfels mit Seitenl¨ange a bezeichnet.
Eine Menge hat also Maß null, wenn sie sich von h¨ochstens abz¨ahlbar vielen ”beliebig kleinen“ Mengen ¨uberdecken l¨asst.
Insbesondere l¨asst sich mit dieser Definition auch die bekannten Tatsache zeigen, dass jede Teilmenge einer Nullmenge und jede Vereinigung von abz¨ahlbar vielen Nullmengen wieder Maß null hat. Ist n¨amlich A = S
n∈NAn mit λd(An) = 0, dann gibt es zu ε > 0 f¨ur jedes n ∈ N eine ¨Uberdeckung Anm, m ∈ N von An mit P
m∈Nvol(Anm)< 2−nε. Es istAnm, n, m∈Ndann eine abz¨ahlbare ¨Uberdeckung von A mit P
n,m∈Nvol(Anm)< ε.
Lemma 1.8. Eine Teilmenge M ⊂Rd hat genau dann Lebesgue-Maß null, wenn f¨ur alle ε >0 eine Folge von Kugeln Bnε existiert, sodass gilt
M ⊂ [∞ n=1
Bnε und
X∞ n=1
vol(Bnε)< ε (1.6)
1Vgl. [Wer07, Kapitel 5 - 8]
wobei vol(B) den elementaren Inhalt rdω1 einer d–dimensionalen Kugel mit Radius r bezeichnet, wenn ω1 das Volumen der d-dimensionalen Einheitskugel ist.
Beweis. Sei ε > 0 und M ⊂ Rd habe Lebesgue-Maß null. Sei weiters Wn eine Folge von W¨urfeln, sodass gilt P
n∈Nvol(Wn)<(√2d)dω−11ε. Ist mn der Mittelpunkt undan die Seitenl¨ange von Wn, so definiere man Bn als die abgeschlossene Kugel mit Mittelpunkt mn und Radius √2dan. Dann giltM ⊂S
n∈NBn und X
n∈N
vol(Bn) =X
n∈N
√d 2 an
!d
ω1=
√d 2
!d
ω1
X
n∈N
adn=
√d 2
!d
ω1
X
n∈N
vol(Wn)< ε.
Existiert umgekehrt zu jedem ε > 0 eine Folge von Kugeln, die (1.5) erf¨ullt, so be- trachte man zu einer Folge von Kugeln Bn die Folge von W¨urfeln Wn, sodass Wn den gleichen Mittelpunkt wieBn hat und die Seitenl¨ange von Wn dem doppelten Radius von Bn entspricht. Dann gilt M ⊂S
n∈NWn und X
n∈N
vol(Wn) =X
n∈N
(2rn)d= 2dω−11X
n∈N
rndω1= 2dω1−1X
n∈N
vol(Bn) Zu beliebigemε >0 w¨ahle man eine ¨UberdeckungBnεvonM mitP
n∈Nvol(Bn)<2−dω1ε.
Die entsprechende Folge von W¨urfeln Wnε erf¨ullt dann (1.5). Also hat M Maß null.
Mit ¨ahnlichen Argumenten kann man zeigen, dass es egal ist, ob in Definition 1.7 W¨urfel, Quader oder Kugeln verwendet werden und ob diese offen oder abgeschlossen sind.
Lemma 1.9. Sei O ⊂ Rd offen, f : O → Rd stetig differenzierbar und A ⊂ O mit λd(A) = 0. Dann hat auch f(A) Maß null.
Beweis. Nehmen wir zuerst an, dass A ganz in einer kompakten Menge enthalten ist. In diesem Fall gen¨ugt f auf A einer Lipschitzbedingung
kf(x)−f(y)k ≤Lkx−yk f¨ur x, y ∈A.
F¨ur beliebiges ε > 0 sei dann An, n ∈ N eine ¨Uberdeckung von A aus Kugeln mit P
n∈Nvol(An) < L−dε und rn sei der Radius von An. Wegen der Lipschitzbedingung ist f(An) ganz in einer Kugel Cn mit Radius L·rn enthalten. Somit gilt f(A) ⊂ S
n∈NCn
und P
n∈Nvol(Cn)< ε. Also hat f(A) Lebesgue-Maß null.
Ist A nun nicht ganz in einer kompakten Menge enthalten, dann existieren kompakte Mengen Kn, n ∈ N mit Kn ↑ O, sodass f(A) sich als die abz¨ahlbare Vereinigung der Nullmengen f(Bn) mit Bn =Kn∩A darstellen l¨asst und somit selbst Maß null hat.
Dieses Lemma macht es nun sinnvoll von Nullmengen einer differenzierbaren Mannig- faltigkeit zu sprechen.
Definition 1.10. Eine Teilmenge A einer n-dimensionalen differenzierbaren Mannigfal- tigkeit M heißt vom Maß null, wenn sie darstellbar ist als A = S
i∈NAi, sodass Karten (Ui, hi) existieren mit Ai ⊂Ui und hi(Ai) hat Maß null in Rn.
Wegen Lemma 1.9 ist diese Definition unabh¨angig von der Wahl der Mengen Ai und der Karten Ui. Tats¨achlich hat A genau dann Maß null, wenn f¨ur jede beliebige Karte (V, g) die Menge g(V ∩A)⊂Rn Maß null hat. Es gilt n¨amlich
g(V ∩A) =[
i∈N
g(V ∩Ai) = [
i∈N
g◦h−i 1 ◦hi(V ∩Ai).
Da aberhi(V ∩Ai)⊂RnMaß null hat und der Kartenwechselg◦h−i 1 stetig differenzierbar ist, hat mit Lemma 1.9 auch g(V ∩A) Maß null.
Offensichtlich gilt auch, dass jede Teilmenge einer abz¨ahlbaren Vereinigung von Null- mengen wieder Maß null hat. Da die Topologie einer Mannigfaltigkeit eine abz¨ahlbare Basis besitzt, folgt unmittelbar
Korollar 1.11. Sei A Teilmenge einer n-dimensionalen Mannigfaltigkeit M. Hat jeder Punkt p∈M eine Umgebung Up, sodass Up∩A Maß null hat, so hat auch A Maß null.
Beweis. Da die Topologie von M eine abz¨ahlbare Basis hat, k¨onnen wir abz¨ahlbar viele Ui ausw¨ahlen, sodass giltA=S
i∈N(Ui∩A). Als abz¨ahlbare Vereinigung von Nullmengen hat dann auch A Maß null.
Zu beachten ist allerdings, dass wir auf einer Mannigfaltigkeit kein Maß im eigent- lichen Sinn definiert haben, sondern nur eine Klasse von
”kleinen“ Mengen, die wir als Nullmengen oder
”Mengen mit Maß null“ bezeichnen.
Kapitel 2
Der Satz von Sard
Definition 2.1. Seien M1 und M2 n1- bzw. n2-dimensionale differenzierbare Mannig- faltigkeiten und ϕ eine differenzierbare Abbildung M1 → M2. Jeder Punkt p ∈ M1 mit rang ϕ < n2 heißt kritischer Punkt von ϕ.
Ein Punkt q∈M2 heißt kritischer Wert vonϕ, wennϕ−1(q)mindestens einen kritischen Punkt enth¨alt.
Insbesondere ist also f¨ur n1 < n2 jeder Punkt aus M1 kritisch. Der Satz von Sard lautet nun wie folgt:
Satz 2.2 (von Sard). Seien M1 und M2 Ck-Mannigfaltigkeiten der Dimension n1 bzw.
n2 und ϕ eine Ck-Abbildung M1 →M2. Gilt
k−1≥max{n1−n2,0}, (2.1) so hat die Menge der kritischen Werte von ϕ Maß null.
Beweis. Ist n1 < n2 so ist der Beweis einfach — in diesem Fall ist jeder Punkt aus M1 kritisch. Zu zeigen ist also, dass ϕ(M1) eine Nullmenge ist. Um das einzusehen, betrachte man einen abz¨ahlbaren Atlas (Ui, gi)i∈N von M1 und Karten (Vi, hi) von M2
mit ϕ(Ui) ⊂ Vi. Sei Ui′ = gi(Ui) ⊂ Rn1 und sei fi = hi ◦ϕ ◦gi−1 die Darstellung von ϕ bez¨uglich der Karten (Ui, gi) und (Vi, hi). Betrachtet man nun f¨ur jedes i ∈ N die Abbildung
f˜i :
Ui′×Rn2−n1 ⊂Rn2 → Rn2 (x, y) 7→ fi(x)
dann ist ˜fistetig differenzierbar und es giltfi(Ui′) = ˜fi(Ui′×{0}). Da aber bekanntermaßen
R
n1
×{0}und somit sicher auchUi′×{0}inRn2 Lebesgue-Maß null haben, ist mit Lemma 1.9 auchfi(Ui′) eine Nullmenge. Also hat f¨ur jedesi∈Ndie Mengeϕ(Ui)⊂M2 Maß null und deshalb auch ϕ(M1) =S
i∈Nϕ(Ui).
Sei nunn1 ≥n2. Wegen Definition 1.10 l¨asst sich das Problem auf den Fall reduzieren, dass M2 = Rn2, M1 Teilmenge des n1-dimensionalen abgeschlossenen Einheitsw¨urfels En1 und f eine Ck-Abbildung von einer Umgebung von En1 in den Rn2 ist. Ist n¨amlich (Ui, gi)i∈N ein abz¨ahlbarer Atlas von M1 und (Vi, hi)i∈N ein Atlas von M2 mit ϕ(Ui)⊂Vi
und ist f¨ur alle Ui das Bild Ui′ =gi(Ui)⊂Rn1 beschr¨ankt, dann existiert zu jedem i∈N eine affine Abbildung ti, sodass ti(Ui)⊂En1 ist. Die Darstellung fi von ϕ bez¨uglich der Karten gei =ti◦gi und hi bildet (wie verlangt) eine Teilmenge des En1 in denRn2 ab.
Ist nunCdie Menge der kritischen Punkte vonϕundCi =Ui∩C, so istCei =gei(Ci) die Menge der kritischen Punkte vonfi. Gilt dann f¨urfider Satz von Sard, sodassfi(Cei) Maß null hat, so ist ϕ(Ci) = h−i 1(fi(Cei)) eine Nullmenge. Also hat auch ϕ(C) = S
i∈Nϕ(Ci) als abz¨ahlbare Vereinigung von Nullmengen Maß null.
Falls der Atlas (Ui, gi)i∈N aber Karten enth¨alt, f¨ur dieUi′ nicht beschr¨ankt ist, so l¨asst sich aus ihm ein Atlas konstruieren, der diese Bedingung erf¨ullt. Jede unbeschr¨ankte Menge Ui′ l¨asst sich n¨amlich von abz¨ahlbar vielen beschr¨ankten offenen Mengen Uij′ , j ∈
N uberdecken. Ersetzt man jede solche Karte (U¨ i, gi) durch die Karten (Uij, g|Uij) mit Uij =g−1(Uij′ ), so erh¨alt man den gesuchten Atlas.
Betrachten wir nun den Fall n1 =n2. Zu zeigen ist
Lemma 2.3. Sei ϕ = (ϕ1, . . . , ϕn)T eine Abbildung von En nach Rn, wobei jede der Abbildungen ϕi auf einer Umgebung von En definiert und stetig differenzierbar ist. Dann hat die Menge der kritischen Werte von ϕ Maß null.
Beweis. Zu zwei Punkten x= (x1, . . . , xn)T und y = (y1, . . . , yn)T aus En existiert nach dem Mittelwertsatz der Differentialrechnung f¨ur jedes i ∈ {1, . . . , n} ein Punkt zi = (zi1, . . . , zi n)T aus der Verbindungsstrecke von x und y, sodass gilt
ϕi(y)−ϕi(x) = Xn
j=1
∂ϕi
∂xj
(zi)(yj−xj). (2.2)
Also gilt
|ϕi(y)−ϕi(x)| ≤ Xn
j=1
∂ϕi
∂xj
(zi)
|yj−xj| ≤ ky−xk Xn
j=1
∂ϕi
∂xj
(zi)
Und weiter
kϕ(y)−ϕ(x)k2 = Xn
i=1
|ϕi(y)−ϕi(x)|2 ≤
≤ Xn
i=1
ky−xk Xn
j=1
∂ϕi
∂xj
(zi)
!2
=ky−xk2 Xn
i=1
Xn j=1
∂ϕi
∂xj
(zi)
!2
Da die partiellen Ableitungen ∂ϕ∂xi
j stetig und somit auf En beschr¨ankt sind, l¨asst sich eine Lipschitzkonstante L finden, sodass gilt
kϕ(y)−ϕ(x)k< L ky−xk. (2.3) Sei weitersTx = (Tx1, . . . , Tx n)T die bei xzu ϕtangentiale AbbildungTx(y) = ϕ(x) + dϕ(x)(y−x). Die einzelnen Komponentenfunktionen haben dann die Form
Tx i(y) =ϕi(x) + Xn
j=1
∂ϕi
∂xj
(x)(yj −xj) Mit (2.2) folgt
ϕi(y)−Tx i(y) = Xn
j=1
∂ϕi
∂xj
(zi)−∂ϕi
∂xj
(x)
(yj −xj) DaϕeineC1-Funktion ist, sind die partiellen Ableitungen∂ϕ∂xi
j stetig und damit gleichm¨aßig stetig auf der kompakten Menge En. Also existieren f¨ur alle i, j ∈ {1, . . . , n} Funktionen bij(ε), sodass gilt: bij(ε) →0 f¨ur ε → 0 und |∂ϕ∂xji(y)− ∂ϕ∂xji(x)| ≤ bij(kx−yk). Außerdem ist sicher kzi−xk ≤ ky−xk und damit folgt
kϕ(y)−Tx(y)k2≤ Xn
i=1
Xn j=1
∂ϕi
∂xj
(zi)−∂ϕi
∂xj
(x)
(yi−xi)
2
≤
≤ Xn
i=1
Xn j=1
bij(kx−yk)ky−xk
!2
=kx−yk2 Xn
i=1
Xn j=1
bij(kx−yk)
!2
Insbesondere existiert also eine Funktion b(ε), sodass b(ε)→0 f¨ur ε→0 und
kϕ(y)−Tx(y)k ≤b(kx−yk)kx−yk (2.4) Ist xein kritischer Punkt von ϕ, dann hat die Jacobi-Matrix dϕ(x) nicht vollen Rang und das Bild von Rn unter Tx ist in einer n−1 – dimensionalen EbenePx enthalten.
Sei nun ε so klein, dass b(ε)≤L ist, und es gelte kx−yk ≤ε. Wegen (2.4) gilt dann kϕ(y)−Tx(y)k ≤b(ε)ε. Es ist also ϕ(y) in jener Region Q enthalten, die durch zwei im Abstand von b(ε)ε zu Px parallel liegende n−1–dimensionale Ebenen begrenzt wird.
ϕ
b
ϕ(x)
b
ϕ(y)
Px
εb(ε) εb(ε) Lε
Abb. 2.1: Zwei zu Px parallele Hyperebenen und W¨urfel um ϕ(x) mit Seitenl¨ange 2Lε schr¨anken die Position von ϕ(y) ein
Wegen (2.3) ist ϕ(y) außerdem in jedem W¨urfel, dem die Kugel mit Mittelpunkt in ϕ(x) und RadiusLε einbeschrieben werden kann, — also jedem W¨urfel mit Mittelpunkt
inϕ(x) und Seitenl¨ange 2Lε — enthalten (vgl. Abb. 2.1). SeiW nun ein solcher W¨urfel, der 2 zuPxparallele Seiten hat. Dann istW∩Qeinn–dimensionaler Quader mit Volumen 2nLn−1εnb(ε) und es gilt offensichtlich auch ϕ(y)∈W ∩Q.
Teilt man nun En in pn W¨urfel mit Seitenl¨ange 1/p auf und betrachtet alle jene W¨urfel, die einen kritischen Punkt x enthalten, dann ist jeder solcher W¨urfel in einer Kugel um xmit Radius√
n/penthalten. W¨ahlt man pgroß genug, so ist nach der obigen Ausf¨uhrung also das Bild eines solchen W¨urfels in einem n–dimensionalen Quader mit Maß 2nLn−1(√pn)nb(√pn) enthalten.
Die Menge der kritischen Werte von ϕ ist nun aber sicher Teilmenge des Bilds aller W¨urfel, die zumindest einen kritischen Punkt enthalten. Da es h¨ochstenspnsolche W¨urfel gibt, ist das Maß der Menge der kritischen Werte sicher kleiner gleich
pn2nLn−1 √
n p
n
b √
n p
= 2nLn−1 √ nn
b √
n p
. (2.5)
F¨ur p→ ∞ geht dieser Ausdruck gegen null — also hat die Menge der kritischen Werte Maß null.
Sei nun n1 > n2 — dann muss (2.5) ersetzt werden durch:
pn12n2Ln2
√n1
p n2
b √n1
p
= 2n2Ln2(√
n1)n2pn1−n2b √n1
p
(2.6) Dieser Ausdruck konvergiert f¨urp→ ∞im Allgemeinen allerdings nicht — der Beweis f¨ur den Fall n1 > n2 ist komplexer und erfordert eine genauere Untersuchung des Verhaltens vonϕbei kritischen Punkten. Was wir zeigen wollen ist, dass kϕ(x)−ϕ(y)kbei kritischen Punkten
”schnell genug“ gegen 0 konvergiert, sodass auch (2.6) f¨ur p→ ∞verschwindet.
Lemma 2.6 liefert die ben¨otigte Absch¨atzung — zun¨achst ben¨otigen wir jedoch noch die beiden folgenden Resultate:
Lemma 2.4. Sei ϕ : Bεm = {x ∈ Rm | kxk < ε} → Rn eine stetig differenzierbare Abbildung, sodass alle partiellen Ableitungen von ϕ beschr¨ankt sind. Sei weiters f :O ⊂
R
n → R mit ϕ(Bεm)⊂ O stetig differenzierbar und seien y ∈ Bεm, k ∈ N0 und b(ǫ) eine monotone Funktion mit limǫ→0b(ǫ) = 0, sodass f¨ur alle x∈Bεm gilt:
∂f
∂xj
(ϕ(x))
≤b(kx−yk)kx−ykk j = 1, . . . , n.
Dann existiert eine Konstante K, die nur von ϕ abh¨angt, sodass
|f(ϕ(x))−f(ϕ(y))| ≤Kb(kx−yk)kx−ykk+1 f¨ur alle x∈Bεm gilt.
Beweis. Sei x ∈ Bmε und sei F(t) = f(ϕ(y+ (x−y)t)). Dann ist F(t) stetig differen- zierbar und es gilt f(ϕ(x)) = F(1) und f(ϕ(y)) = F(0). Mit dem Mittelwertsatz der
Differentialrechnung folgt f(ϕ(x))−f(ϕ(y)) = F′(t) f¨ur ein t ∈(0,1). Es gilt aber nach der Kettenregel
F′(t) =df(ϕ(y+ (x−y)t))·dϕ(y+ (x−y)t)·(x−y) =
= Xn
j=1
Xm i=1
∂f
∂xj
(ϕ(y+ (x−y)t))· ∂ϕj
∂xi
(y+ (x−y)t)·(xi−yi)
und mit K1 =msup ∂ϕ∂xji
folgt weiter
|F′(t)| ≤ Xn
j=1
∂f
∂xj
(ϕ(y+ (x−y)t)) Xm
i=1
∂ϕj
∂xi
(y+ (x−y)t)·(xi−yi) ≤
≤K1kx−yk Xn
j=1
∂f
∂xj
(ϕ(y+ (x−y)t)) <
< nK1b(kx−yk)kx−ykk
Setzt man nunK =nK1, so ist das Lemma bewiesen.
Lemma 2.5. Sei A eine Teilmenge des Rn, k ∈ N und O ⊂ Rn offen mit A ⊂ O.
Dann existieren eine Folge von Mengen Ai, i ∈ N0 und Abbildungen ϕi, i ∈ N, sodass A⊂S∞
i=0Ai ist, A0 abz¨ahlbar ist und f¨ur i≥1 gilt:
1. ϕi ist eine Einbettung1 Bmεii = {x ∈ Rmi| kxk < εi} → Rn, mit beschr¨ankten partiellen Ableitungen, sodass Ai ⊂ϕi(Bεmii) ist und f¨ur x, y ∈Bεmii gilt
kϕi(x)−ϕi(y)k ≥ kx−yk (2.7) 2. F¨ur jede k-mal stetig differenzierbare Funktion f :O →R, die auf A verschwindet,
existieren monotone Funktionen bi(ǫ) mit limǫ→0bi(ǫ) = 0, sodass
|f(ϕi(x))| ≤bi(kx−yk)kx−ykk (2.8) f¨ur alle x, y ∈Bεmii mit ϕi(y)∈Ai gilt.
Beweis. Im Fall n = 1 ist der Beweis einfach. A0 sei die Menge der isolierten Punkte von A. F¨ur jeden Punkt x ∈ A\A0 existiert dann eine Folge von Punkten xi ∈ A mit x = limi→∞xi. Verschwindet f ∈ Ck(O) auf A, so gilt f(xi) = 0 und es folgt f′(x) = f(2)(x) = . . . = fk(x) = 0. Klarerweise ist n¨amlich f′(x) = limn→∞
f(xn)−f(x) xn−x = 0.
Induktiv kann man nun f¨ur m≤k zeigen, dass auch f(m)(x) = 0 ist. Giltf(j)(x) = 0 f¨ur
1Eine Einbettung ist ein stetig differenzierbarer Hom¨oomorphismusf :O ⊂ Rn →f(O) ⊂Rm mit n≤m, wobeiO6=∅und inRn offen undf(O) mit der Spurtopologie versehen ist, sodass df(x) f¨ur alle x∈O maximalen Rangnhat.
1≤ j < k, so existiert n¨amlich nach dem Satz von Taylor f¨ur alle i ∈N ein ξi zwischen xi und x, sodass gilt:
0 = f(xi) =
mX−1 j=0
f(j)(x)
j! (xi−x)j+ f(m)(ξi)
m! (xi−x)m = f(m)(ξi)
m! (xi−x)m
Also gilt f(m)(ξi) = 0 — und da mit (xi)i∈N auch (ξi)i∈N gegen x konvergiert, folgt f(m)(x) = limi→∞f(m)(ξi) = 0.
A\A0l¨asst sich sicher durch abz¨ahlbar viele Intervalle (ai, bi) mit [ai, bi]⊂Ouberdecken.¨ W¨ahlt man nun ϕi als Translation von (−bi−2ai,bi−2ai) nach (ai, bi) und Ai = (A\A0)∩ (ai, bi), so ist das Lemma erf¨ullt. F¨ur z1 =ϕi(x) undz2 =ϕi(y)∈Ai gilt n¨amlich wegen dem gerade Besprochenen nach dem Satz von Taylor:
f(z1) =
k−1
X
j=0
f(j)(z2)
j! (z1 −z2)j+ f(k)(ξ)
k! (z1−z2)k = f(k)(ξ)
k! (z1−z2)k
f¨ur ein ξ zwischen z1 und z2. Da aber f(k) stetig und deshalb auf [ai, bi] gleichm¨aßig stetig ist, existiert eine Funktion bi(ǫ) mit limǫ→0bi(ǫ) = 0, sodass f¨urx1, x2 ∈[ai, bi] gilt
|f(k)(x1)−f(k)(x2)| ≤b(|x1−x2|). Wegen f(z2) = 0 folgt:
|f(ϕ(x))|=|f(z1)|= |f(k)(ξ)|
k! |z1−z2|k≤bi(|z1−z2|)|z1−z2|k =bi(|x−y|)|x−y|k Auch der Fall k = 0 ist leicht — wobei die Dimension n beliebig sein kann. Da O offen ist, findet man dann zu jedem Punkt p ∈ A eine Umgebung Up von p f¨ur deren Abschluss gilt:Up ⊂O — wir k¨onnenUp sogar aus der abz¨ahlbaren Basis ausε - Kugeln der Topologie vonOw¨ahlen. In Summe erh¨alt man dadurch eine abz¨ahlbare ¨Uberdeckung Ui, i∈Nvon A aus ε–Kugeln. W¨ahlt man nun Ai = (A∩Ui) und ϕi als die Translation von Ui zum Ursprung, dann ist f als stetige Funktion auf der kompakten Menge Ui — und damit auch aufUi selbst — gleichm¨aßig stetig. Also existieren Funktionenbi die (2.8) erf¨ullen.
Der Beweis funktioniert nun durch vollst¨andige Induktion nach p = n +k — die Induktionsannahme ist, dass Lemma 2.5 f¨urn+k < pwahr ist. Sei alson+k =p,n >1, k >0 und A⊂Rn.A1 sei dann definiert als die Menge aller Punkte x∈A, bei denen f¨ur alle f ∈Ck(O), die auf A verschwinden, auch deren partielle Ableitungen verschwinden, wo also gilt:
∂f
∂xj
(x) = 0 f¨ur alle j = 1, . . . , n und sei A2 =A\A1.
Laut Induktionsvoraussetzung existieren nun eine abz¨ahlbare MengeA10sowie Mengen A1i und Abbildungen ϕ1i von Bεmii →Rn, i∈N, sodass gilt:A1i ⊂ϕ1i(Bεmii), die ϕ1i erf¨ullen (2.7) und f¨ur jede Funktion g ∈ Ck−1, die auf A1 verschwindet, existieren Funktionen b1i(ǫ), mit
|g(ϕ1i(x))| ≤b1i(kx−yk)kx−ykk−1 (2.9) wenn x∈A1i ist.
Wegen der Definition von A1 gilt (2.9) insbesondere f¨ur g = ∂x∂f
j, wenn f ∈ Ck auf A verschwindet. Wir wollen nun zeigen, dass die Mengen A1r und ϕ1r (2.8) erf¨ullen. Das folgt aber unmittelbar aus Lemma 2.4, wenn wir entsprechende Funktionen ¯bi(ǫ) finden k¨onnen, die
|∂f
∂xj
(ϕ1i(x))| ≤¯bi(kx−yk)kx−ykk−1 f¨ur allej ∈ {1, . . . , n}erf¨ullen. Die Summen ¯bi(ǫ) =Pn
j=1b1ij(ǫ) aller Schrankenfunktionen b1ij(ǫ) aus (2.9) f¨ur die jeweiligen partiellen Ableitungen ∂x∂fj erf¨ullen dieses Kriterium. Also haben wir Mengen A1r und Abbildungen ϕ1r gefunden, die ganz A1 uberdecken und den¨ geforderten Bedingungen gen¨ugen. Das Gleiche wollen wir nun f¨ur A2 tun.
Sei p∈A2 — dann gibt es also eine Funktion g ∈Ck, die aufA verschwindet, sodass gilt ∂x∂g
i(p) 6= 0 f¨ur zumindest ein i ∈ {1, . . . , n}. O.b.d.A. k¨onnen wir annehmen, dass i=n. Nach dem Satz ¨uber die implizite Funktion existieren eine UmgebungN vonpund eine k–mal stetig differenzierbare Funktion τn(x1, . . . , xn−1), die auf einer Umgebung M von (p1, . . . , pn−1)T definiert ist, sodass die vollst¨andige L¨osung der Gleichung
g(x1, . . . , xn) = 0
aufN durch die Punkte (x1, . . . , xn−1, τn(x1, . . . , xn−1))T gegeben ist. Betrachtet man nun die Abbildung τ von M →Rn, die definiert ist durch:
τ((x1, . . . , xn−1)T) = (x1, . . . , xn−1, τn(x1, . . . , xn−1))T dann gilt: τ ∈Ck, kτ(x)−τ(y)k ≥ kx−yk und N ∩A⊂τ(M).
Wendet man nun die Induktionsvoraussetzung auf D = τ−1(N ∩A) an, so erh¨alt man Mengen Di, i ∈ N0, sodass D ⊂ S
i∈N0Di und D0 abz¨ahlbar ist, und Abbildungen ψi, die (2.7) und (2.8) erf¨ullen, sodass f¨ur jede Ck-Funktion h, die auf D verschwindet, Funktionen bi(ǫ) existieren, die
|h(ψi(x))|< bi(kx−yk)kx−ykk
erf¨ullen, wenn ψi(y) ∈ Di ist. Verschwindet aber f ∈ Ck auf A, dann verschwindet h = f ◦τ ∈ Ck auf D. Setzt man also ϕi =τ ◦ψi und Ni = τ(Di), so erh¨alt man eine Uberdeckung von¨ N ∩A, die allen geforderten Kriterien gen¨ugt.
Da zu jedem Punkt p ∈ A2 eine solche Umgebung Np existiert, l¨asst sich ganz A2 durch solche ¨uberdecken — und da eine abz¨ahlbare Basis der Topologie des Rn existiert k¨onnen wir sogar eine abz¨ahlbare Teil¨uberdeckung Nq, q ∈ N ausw¨ahlen. Verf¨ahrt man nun mit jeder dieser Mengen Nq wie oben dargelegt so erh¨alt man in Summe wieder eine abz¨ahlbare ¨Uberdeckung von A2, die die geforderten Kriterien erf¨ullt. Vereinigt man diese ¨Uberdeckung mit der von A1 und benennt die Vereinigung aller darin enthaltenen abz¨ahlbaren Mengen mit A0, so erh¨alt man die gesuchte ¨Uberdeckung von A.
Mit Lemma 2.4 und Lemma 2.5 erh¨alt man nun leicht das folgende Lemma 2.6, auf dem der Beweis des Satz von Sard im Falln1 > n2 beruht:
Lemma 2.6. Sei A⊂ Rn, sei O ⊂ Rn offen mit A ⊂O und sei q ∈N. Dann existieren Mengen Ai, i∈N0 mit A⊂S∞
i=0Ai, sodass A0 abz¨ahlbar ist und f¨ur die Ai, i≥1 gilt:
F¨ur jede q mal stetig differenzierbare Abbildung f :O → R, deren kritische Punkte eine Obermenge von A sind, existieren Funktionen bi, i ∈ N f¨ur die gilt: bi(ǫ) ist monoton fallend, bi(ǫ)→0 f¨ur ǫ→ 0und
|f(x)−f(y)|< bi(kx−yk)kx−ykq (2.10) f¨ur alle x, y ∈Ai.
Beweis. Da jeder Punkt x ∈ A kritischer Punkt von f ist, gilt rang df(x) = 0 — also verschwinden alle partiellen Ableitungen von f auf A. Wenden wir Lemma 2.5 an, so erhalten wir Mengen Ai, i∈N0, und Abbildungen ϕi, i∈N, sodass A0 abz¨ahlbar ist und alle ϕi (2.7) erf¨ullen. Außerdem existieren f¨ur jede partielle Ableitung ∂x∂fj, j = 1, . . . , n monotone Funktionen bji(ǫ), i∈N, mit limǫ→0bji(ǫ) = 0, sodass gilt
∂f
∂xj
(ϕ(x))
< bji(kx−yk)kx−ykq−1
falls ϕi(y) ∈ Ai ist. Insbesondere gibt es deshalb auch f¨ur jedes i ∈ N eine monotone Funktion bi(ǫ) mit limǫ→0bi(ǫ) = 0, sodass dann f¨ur allej ∈ {1, . . . , n} gilt:
∂f
∂xj
(ϕ(x))
< bi(kx−yk)kx−ykq−1
Aus Lemma 2.4 folgt nun weiter die Existenz von Funktionen ˆbi(ε) mit limε→0ˆbi(ε) = 0, sodass gilt
|f(ϕ(x))−f(ϕ(y))|<ˆbi(kx−yk)kx−ykq
falls ϕ(y)∈Ai — wegen Ai ⊂ϕ(Bǫmii) und (2.7) gilt damit insbesondere f¨ur x, y ∈Ai
|f(x)−f(y)|<ˆbi(kx−yk)kx−ykq
Der Beweis des Satz von Sard ist nun nicht mehr schwer — zuerst beweisen wir:
Lemma 2.7. Sei ϕ= (ϕ1, . . . , ϕn2) eine Abbildung des n1-dimensionalen Einheitsw¨urfel En1 → Rn2, wobei jede Funktion ϕi eine auf einer Umgebung von En1 definierte Cq- Funktion ist, und sei A die Menge der Punkte von En1, wo gilt rang ϕ = 0. Gilt q ≥ nn12, dann hat ϕ(A) Maß null.
Beweis. Wir wenden Lemma 2.6 an und erhalten MengenAr,r ∈N0, sodassA ⊂S
r∈NAr
ist. Zu zeigen ist nun, dass ϕ(Ar) f¨ur alle r ∈ N0 Maß null hat. Im Fall r = 0 ist das trivial, da A0 abz¨ahlbar ist — betrachten wir also Ar mit r ≥1. Bei einem Punkt x gilt rang ϕ = 0 genau dann, wennxein kritischer Punkt von allenϕi ist. Mit (2.10) existieren nun Funktionen bir(ǫ), sodass f¨ur x, y ∈Ar mit kx−yk< ε gilt
|ϕi(x)−ϕi(y)|< bir(ε)εq
und damit existiert auch eine Funktion br(ǫ) mit limε→0br(ε) = 0, sodass gilt
kϕ(x)−ϕ(y)k< br(ε)εq. (2.11) Teilt man nun, wie im Beweis von Lemma 2.3, En1 in pn1 W¨urfel Wα mit Seitenl¨ange1p, dann ist f¨ur jeden dieser W¨urfel ϕ(Ar ∩Wα) wegen (2.11) in einer Kugel mit Radius b√n1
p
√n1
p
q
enthalten. Da es h¨ochstens pn1 solcher Kugeln gibt, und ϕ(Ar) sicher ganz in diesen enthalten ist, ist das Maß von ϕ(Ar) ist auf jeden Fall kleiner gleich
pn1
b √n1
p
√n1
p
qn2
ωn2 =√ n1qn2
ωn2b √n1
p n2
pn1−qn2
wobei ωn2 das Volumen der n2-dimensionalen Einheitskugel bezeichnet. Da q ≥ nn12 ist, konvergiert dieser Ausdruck f¨urp→ ∞ gegen null — also istϕ(Ar) eine Nullmenge.
Lemma 2.8. Sei ϕ wie in Lemma 2.7 und sei A die Menge der Punkte mit rang ϕ= r (0≤r < n2). Dann hat ϕ(A) Maß null, wenn gilt q ≥ nn12−−rr.
Beweis. Den Fallr= 0 haben wir schon in Lemma 2.7 betrachtet — sei alsor≥1. Wegen Lemma 1.11 reicht es zu zeigen, dass f¨ur jeden Punkt aus A eine Umgebung U existiert, sodassϕ(U∩A) eine Nullmenge ist. Sei alsox0 ∈A. Wegen Lemma 1.2 existieren Karten (U, g) um x0 und (V, h) um ϕ(x), auf die bezogen ϕ die Darstellung ψ =h◦ϕ◦g−1 hat mit
ψi(x1, . . . , xn1) =xi i= 1, . . . , r ψi(x1, . . . , xn1) =Fi(x1, . . . , xn) i=r+ 1, . . . , n2
H¨alt man nun x1, . . . , xr fest, dann hat die Abbildung2 η:
U(x1,...,xr) → Rn2−r
(xr+1, . . . , xn1) 7→ F(x1, . . . , xr, xr+1, . . . , xn1)
genau dann Rang null, wenn (x1, . . . , xn1) ∈ U ∩A ist — nach Lemma 2.7 hat also die Menge η( (U ∩A)(x1,...,xr)) = (ϕ(U ∩A))(x1,...,xr) Maß null inRn2−r.
Da nach dem Satz von Fubini f¨ur jede messbare Menge M ⊂Rd gilt:
λd(M) = Z
R
d1
λd2(Mx)dλd1(x)
falls d=d1+d2 ist, folgt damit unmittelbar, dass ganz ϕ(U ∩A) eine Nullmenge ist.
Der Beweis des Satz von Sard f¨ur den Fall, dass n1 > n2 ist nun einfach:
Sei A die Menge der kritischen Punkte von ϕ, dann gilt A=Sn2−1
r=0 Ar, wobei Ar die Menge der Punkte ist, wo ϕ Rang r hat. Die Menge der kritischen Werte ist dann sicher enthalten in Sn2−1
r=0 f(Ar).
2U(x1,...,xn)bezeichnet den (x1, . . . , xn)–Schnitt vonU:{(xr+1, . . . , xn1)∈Rn1−r|(x1, . . . , xn1)∈U}.
Wegen Voraussetzung (2.1) istk ≥n1−n2+1. Also istk ≥ nn12−−rr f¨urr ∈ {0, . . . , n2−1} und nach Lemma 2.8 hat deshalb dann jede der Mengen f(Ar) Maß null — und somit auch f(A) selbst.
Aus dem Satz von Sard erh¨alt man insbesondere folgendes
Korollar 2.9. Sei O⊂Rn offen, f :O →Rn stetig differenzierbar undC die Menge der kritischen Punkte von f. Dann hat f(C) Lebesgue-Maß null.
Kapitel 3
Verallgemeinerte
Transformationsformel
SeienX, Y ⊂Rpoffen undt :X →Y einC1–Diffeomorphismus. Dann lautet die bekannte Transformationsformel f¨ur Integrale
Z
Y
f dλp = Z
X
f◦T · |detdt| dλp (3.1) Mit dem Satz von Sard ist es nun m¨oglich, die Transformationsformel f¨ur Integrale zu verallgemeinern:
Satz 3.1 (Verallgemeinerte Transformationsformel). Seien X ⊂ Rp offen, t : X → Rp stetig differenzierbar,Y =t(X)undC die Menge der kritischen Punkte vont. F¨ur y∈Y sei N(y)∈[0,+∞] die Anzahl der x∈X\C mit t(x) =y. Dann ist N(y)∈ M+(Y,LpY) und f¨ur alle f ∈ M+(Y,LpY) gilt:1
Z
Y
Nf dλp = Z
X
f◦t· |detdt| dλp (3.2) F¨ur Lebesuge-meßbare Funktionen f : Y → R oder f : Y → C ist Nf genau dann λp- integrierbar ¨uber Y, wenn f ◦t· |detdt| ¨uber X λp-integrierbar ist. In diesem Fall gilt (3.2).
Beweis. Sei zun¨achst detdt 6= 0 und K ⊂ X kompakt. Zu jedem x ∈ K existieren dann offene Umgebungen Ux von x und Vx von t(x), sodass t|Ux : Ux → Vx ein C1- Diffeomorphismus ist. {Ux | x ∈ K} bildet eine offene ¨Uberdeckung von K und da K kompakt ist, existieren endlich viele x1, . . . , xm ∈K, sodass giltK ⊂Sm
j=1Uxj. Die MengenA1 =Ux1∩K,A2 = (Ux2∩K)\A1,. . .,Am= (Uxm∩K)\Sm−1
j=1 Aj sind dann disjunkte Lebesgue-Mengen mit Sm
j=1Aj =K. F¨ur jede dieser Mengen Aj gilt nach der Transformationsformel außerdem:
Z
t(Aj)
f dλp = Z
Aj
f◦t· |detdt| dλp
1Anmerkung: M+(Y,LpY) bezeichnet die Menge der Lebesgue-messbaren Funktionen von Y nach [0,+∞].