Rechenregeln f¨ ur Differentialoperatoren
F¨ ur r¨ aumliche Vektorfelder F ~ , G ~ und r¨ aumliche Skalarfelder U , V gelten folgende Rechenregeln.
Bei der Hintereinanderschaltung von Gradient, Divergenz und Rotation gilt rot(grad U ) = ~ 0
div(rot F ~ ) = 0
rot(rot F ~ ) = grad(div F ~ ) − ∆ F ~
wobei der Laplace-Operator einer vektorwertigen Funktion komponentenweise zu interpretieren ist, d.h.
∆ F ~ = ∆F
xe ~
x+ ∆F
y~ e
y+ ∆F
z~ e
z.
Bei der Differentiation von Produkten gilt grad(UV ) = U grad V + V grad U div(U F ~ ) = U div F ~ + F ~ · grad U div( F ~ × G ~ ) = G ~ · rot F ~ − F ~ · rot G ~ rot(U F ~ ) = U rot F ~ − F ~ × grad U
Analoge Identit¨ aten gelten auch f¨ ur ebene Felder. Formal erh¨ alt man die entsprechenden Formeln, wenn man die dritte Komponente der Felder null setzt und nur von x und y abh¨ angige Funktionen betrachtet.
Rechenregeln f¨ur Differentialoperatoren 1-2
Beweis:
(i) rot(grad U) = ~ 0:
x-Komponente
∂
y(grad U)
z− ∂
z(grad U )
y= ∂
y∂
zU − ∂
z∂
yU = 0 Analog verschwinden die y- und z -Komponenten.
(ii) div(rot F ~ ) = 0:
Definition der Rotation mit Hilfe des ε-Tensors div(rot F ~ ) = X
i
∂
iX
j,k
ε
i,j,k∂
jF
k= X
i,j,k
ε
i,j,k∂
i∂
jF
kVertauschung der Indizes i, j = ⇒ X . . . = X
ε ∂ ∂ F = − X
. . .
(iii) rot(rot F ~ ) = grad(div F ~ ) − ∆ F ~ : x-Komponente
∂
y(rot F ~ )
z− ∂
z(rot F ~ )
y= (∂
y∂
xF
y− ∂
y∂
yF
x) − (∂
z∂
zF
x− ∂
z∂
xF
z) addiere und subtrahiere den Term ∂
x∂
xF
xerste Komponente der behaupteten Formel:
∂
x(div F ~ ) − ∆F
xanaloge Behandlung der anderen Komponenten (iv) grad(UV ) = U grad V + V grad U Produktregel = ⇒
∂
k(UV ) = (∂
kU)V + U (∂
kV )
Rechenregeln f¨ur Differentialoperatoren 2-2
(v) div(U F ~ ) = U div F ~ + F ~ · grad U : Produktregel = ⇒
div(U F ~ ) = ∂
x(UF
x) + ∂
y(UF
y) + ∂
z(UF
z)
= U ∂
xF
x+ U ∂
yF
y+ U∂
zF
z+ F
x∂
xU + F
y∂
yU + F
z∂
zU
= U div F ~ + F ~ · grad U (vi) div( F ~ × G ~ ) = G ~ · rot F ~ − F ~ · rot G ~ : Definition des Kreuzproduktes und Produktregel
div( F ~ × G ~ ) = X
i,j,k
ε
i,j,k((∂
iF
j)G
k+ [F
j(∂
iG
k)])
Zyklizit¨ at von ε und Vertauschung von i , j im zweiten Term [. . .]
X ε G ∂ F + X
ε F ∂ G
(vii) rot(U F ~ ) = U rot F ~ − F ~ × grad U : x-Komponente von rot(U F ~ ),
∂
y(UF
z) − ∂
z(UF
y) = (∂
yU )F
z− (∂
zU )F
y+ U ∂
yF
z− U ∂
zF
y, entspricht x-Komponente von
U rot F ~ + (grad U ) × F ~ zyklische Vertauschung behauptete Identit¨ at
Rechenregeln f¨ur Differentialoperatoren 2-4
Beispiel:
illustriere die Identit¨ at rot(U F ~ ) = U rot F ~ − F ~ × grad U f¨ ur U = z, F ~ = (−y , x, 1)
t(i) Linke Seite:
rot(U F ~ ) = rot
−yz xz
z
=
0 − x
−y − 0 z + z
=
−x
−y 2z
(ii) Rechte Seite:
U rot F ~ − F ~ × grad U = z rot
−y x 1
−
−y x 1
× grad z
Beispiel:
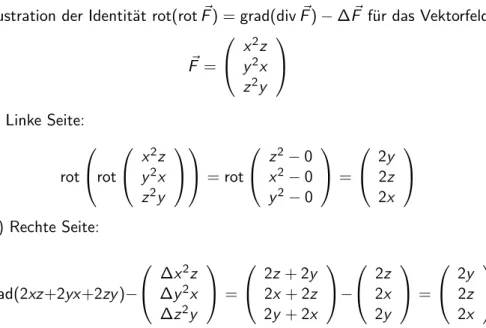
Illustration der Identit¨ at rot(rot F ~ ) = grad(div F ~ ) − ∆ F ~ f¨ ur das Vektorfeld
F ~ =
x
2z y
2x z
2y
(i) Linke Seite:
rot
rot
x
2z y
2x z
2y
= rot
z
2− 0 x
2− 0 y
2− 0
=
2y 2z 2x
(ii) Rechte Seite:
grad(2xz+2yx +2zy)−
∆x
2z
∆y
2x
∆z
2y
=
2z + 2y 2x + 2z 2y + 2x
−
2z 2x 2y
=
2y 2z 2x
Rechenregeln f¨ur Differentialoperatoren 4-1