Kapitel 3
Elementare Funktionen
3.1 Polynome
Definition 3.1 Eine Funktion f : → heißt Polynom vom Grad n, wenn es Zahlen a
0, a
1, . . . , a
n∈ gibt, a
n̸ = 0, so dass
f (x) = a
0+ a
1x + a
2x
2+ . . . + a
nx
n=
!
ni=0
a
ix
iDie a
iheißen Koeffizienten des Polynoms.
Beispiel 3.1
f (x) = 0 Nullfunktion (hat keinen Grad) f (x) = a
0(a
0̸ = 0) “Grad 0”
f (x) = a
0+ a
1x Polynom vom Grad 1 → lineare Funktion f (x) = a
0+ a
1x + a
2x
2Polynom vom Grad 2 → quadratische Funktion Addition und Subtraktion:
!
nk=0
a
kx
k±
!
nk=0
b
kx
k=
!
nk=0
(a
k± b
k)x
kKoeffizientenvergleich Wenn f¨ur alle x ∈ D gilt
!
nk=0
a
kx
k=
!
nk=0
b
kx
kfolgt a
k= b
k(0 ≤ k ≤ n) (3.1)
Der Beweis dieser Behauptung folgt in Beispiel 3.4.
Beispiel 3.2 Es gilt
x
4+ 3x
2+ 7x + 2 = αx
4+ (3β + u)x
3+ 3x
2+ γx + ω genau dann, wenn α = 1, 3β + u = 0, γ = 7, ω = 2.
Faktorisierung:
x
2+ ax + c = (x − x
1)(x − x
2)
= x
2− (x
1+ x
2)
" #$ %
a
x + x
1x
2"#$%
c
Woraus sich ergibt
a = − x
1− x
2, c = x
1· x
2Nullstellen eines Polynoms
Als Nullstellen eines Polynoms bezeichnet man die Werte x
0f¨ur die gilt: f (x
0) = 0.
Beispiel 3.3
f (x) Nullstellen
x
2− 3x + 2 = (x − 1)(x − 2) 1 und 2 (einfach)
(x + 1)
2-1 (doppelt)
(x − a)
na (n-fach)
Definition 3.2
Sei f ein Polynom vom Grad n. Dann nennt man x
0∈ eine k-fache Nullstelle von f , wenn es ein Polynom g vom Grad n − k gibt mit
f (x) = (x − x
0)
kg (x) und g(x
0) ̸ = 0
Sind x
1, x
2, . . . , x
rverschiedene reelle Nullstellen der jeweiligen Vielfachheit k
1, k
2, . . . , k
r, so gilt die Produktdarstellung
f (x) = (x − x
1)
k1· (x − x
2)
k2· . . . · (x − x
r)
kr· q(x)
mit einem Polynom q(x) vom Grad n − k
1− k
2− . . . − k
r, das in keine Nullstellen besitzt.
Satz 3.1 Jedes Polynom vom Grad n mit n ≥ 1 hat h¨ochstens n reelle Nullstellen.
Beweis:
Grad f = n = k
1+ k
2+ . . . + k
r+ Grad q
d. h., die Anzahl der Nullstellen betr¨agt k
1+ k
2+ . . . + k
r= n − Grad q ≤ n.
Beispiel 3.4 Polynominterpolation
Wieviele Punkte (x, y) sind notwendig, um ein Polynom vom Grad n eindeutig zu bestim- men? Zum Beispiel k¨onnte man Geraden oder Parabeln betrachten und vermuten, dass die Anzahl der notwendigen Punkte n + 1 betr¨agt.
Die Vermutung ist richtig, da zwei Polynome f und g von Grad ≤ n, die an (n + 1) ver- schiedenen Stellen (x
0, y
0), (x
1, y
1), . . . , (x
n, y
n) ¨ubereinstimmen, identisch sind. Denn das Polynom h = f − g ist h¨ochstens vom Grad n und hat n + 1 Nullstellen (x
0, x
1, . . . , x
n), woraus sich ergibt, dass h = 0 sein muss.
Diese ¨ Uberlegung beweist auch Gl. (3.1).
Polynome komplexer Zahlen
Im Allgemeinen ist wegen des Restpolynoms q die Anzahl der Nullstellen in unbestimmt (n ist die obere Grenze). Wir haben aber gesehen, dass q komplexe Nullstellen haben kann. Eine naheliegende Frage ist daher, wieviele Nullstellen ein Polynom in hat. Dazu betrachten wir ein Polynom vom Grad n ≥ 1
f(z) =
!
ni=0
a
iz
iwobei z ∈ , a
i∈ und a
n̸ = 0.
Dann gilt der Fundamentalsatz der Algebra (nach F. Gauß, ohne Beweis) Satz 3.2 Ein Polynom vom Grad n ≥ 0 besitzt genau n Nullstellen in . (Dabei wird jede Nullstelle so oft gez¨ahlt, wie ihre Vielfachheit angibt.) D. h. wir k¨onnen schreiben
f (z) = a
n(z − w
1)
k1· (z − w
2)
k2· · · (z − w
r)
krmit n = &
rj=1
k
i.
Satz 3.2 wird als Fundamentalsatz bezeichnet, da er zeigt, dass die komplexen Zahlen
einen formalen Abschluss bilden. Das bedeutet, man braucht keine ¨ubergeordnete Zah-
lenmenge (z. B. “hyperkomplexe” Zahlen), um alle Eigenschaften und Rechenoperationen
von Polynomen durchzuf¨uhren. Dies gilt ebenso f¨ur alle anderen Arten von Funktionen.
(Beachte: Es gibt zwar mehrkomponentige Gr¨oßen, z. B. Vektoren v = (v
1, v
2)
T, aber die Elemente v
1, v
2∈ .)
Konjungiert komplexe Nullstellen Sei nun
f (z) =
!
nk=0
a
kz
kein Polynom mit den reellen Koeffizienten a
k∈ . Dann ist
f (z
∗) =
!
nk=0
a
kz
∗k= f
∗(z) d. h., wenn
0 = f (z
0) ist z
0∗ebenfalls eine Nullstelle:
0
∗= f
∗(z
0) = f (z
∗0) = 0 (3.2) Die komplexen Nullstellen von f(z) treten stets als Paare z
k, z
k∗auf. Ein reelles Polynom, dessen Grad eine ungerade Zahl ist, hat also mindestens eine reelle Nullstelle.
Beispiel 3.5
f(z) =
!
ni=0
a
iz
imit a
i∈ , z ∈ .
Im Falle n = 1 ergibt sich
f(x) = a
0+ a
1z = 0
!a
1̸ = 0
→ z = − a
0/a
11 reelle Nullstelle Im Falle n = 2 ergibt sich
f (z) = z
2+ pz + q = 0 z
1/2= − p
2 ± √
D mit D = p
24 − q
→ D > 0 2 reelle Nullstellen
D = 0 1 doppelte reelle Nullstelle D < 0 2 komplexe Nullstellen
F¨ur n = 3, 4 existieren l¨angliche Formeln f¨ur Nullstellen.
F¨ur n ≥ 5 gibt es keine allgemeinen L¨osungen.
Oft kennt man eine Nullstelle x
0eines Polynoms, d. h.
f (x) = (x − x
0)g(x) (3.3)
mit Grad(g) = Grad(f ) − 1.
g (x) = f(x)
x − x
0f¨ur x ̸ = x
0(3.4)
Die Funktion g (x) kann durch Polynomdivision berechnet werden.
3.2 Rationale Funktionen
Definition 3.3
f (x) = p(x)
q(x) = a
nx
n+ . . . + a
1x + a
0b
mx
m+ . . . + b
1x + b
0(mit a
n̸ = 0, b
m̸ = 0) D = \{ NS von q }
Sei x
0eine k-fache Nullstelle von q und p(x
0) ̸ = 0. Dann heißt x
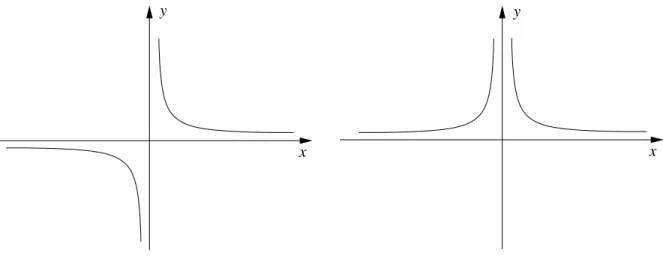
0k-facher Pol von f . Beispiel 3.6 Pole von 1/x und 1/x
2.
y y
x x
Abbildung 3.1: Polstellen von 1/x und 1/x
2Polynomdivision
Sei f = p/q eine rationale Funktion mit Grad p ≥ Grad q.
Dann gilt
p(x)
q(x) = h(x) + r(x) q(x)
mit einem Polynom h(x) (dem “ganzen Anteil”) und einem Restpolynom r(x).
Dabei gilt entweder r(x) ≡ 0 oder Grad r < Grad q.
Beispiel 3.7 Sei x
0= 2 eine Nullstelle von
f (x) = x
3− 4x
2+ 5x − 2 = (x − 2) · g(x) so ist g (x) durch eine Polynomdivision bestimmbar:
x
3− 4x
2+ 5x − 2 : x − 2 = x
2− 2x + 1 x
3− 2x
2− 2x
2+ 5x
− 2x
2+ 4x x − 2 Dies bedeutet
g(x) = x
2− 2x + 1 = (x − 1)
2Es entsteht kein Restpolynom (also r(x) = 0), da x
0= 2 eine Nullstelle ist.
Beispiel 3.8
x
3− 4x
2+ 5x − 2 : (x
2+ 1) = x − 4 + 4x + 2 x
2+ 1 x
3+ x
− 4x
2+ 4x − 2
− 4x
2− 4 4x + 2 Test:
'
x − 4 + 4x + 2 x
2+ 1
(
(x
2+ 1) =
(x − 4)(x
2+ 1) + 4x + 2 = x
3− x − 4x
2− 4 + 4x + 2
= x
3− 4x
2+ 5x + 2
Es ergibt sich ein Restpolynom r(x) = 4x + 2. Der Grad r = 1 ist (um 1) kleiner als der
Grad des Nennerpolynoms q = 2.
3.3 Kreisfunktionen: Sinus und Cosinus
Diese Funktionen werden auch trigonometrische oder Winkelfunktionen genannt.
z y
x 1
P(x, y)
Abbildung 3.2: Einheitskreis x
2+ y
2= 1
Der Einheitskreis x
2+y
2= 1 beschreibt einen Kreis, dessen Mittelpunkt sich im Nullpunkt N = (0, 0) des Koordinatensystems befindet. Der Abstand (Radius) zwischen Mittelpunkt und einem beliebigen Punkt P auf dem Kreisumfang ist 1. Die L¨ange des Kreisumfangs betr¨agt 2π ≈ 6, 28.
Der Winkel α zwischen dem positiven Teil der x-Achse und dem Radius NP liegt zwischen 0
◦und 360
◦. F¨ur das Bogenmaß t, also der Bogen zwischen dem Punkt (1, 0) und P (x, y), gilt α/360 = t/2π. Das Bogenmaß betr¨agt demnach
t = 2πα/360
Das Bogenmaß t ist also sowohl die L¨ange des Kreisbogens, wie auch selbst ein Maß f¨ur den Winkel α. Weiterhin gilt, dass P (x, y) = P (x(t), y(t)).
Definition 3.4 Jedem Winkel t (im Bogenmaß) entspricht eindeutig ein Punkt P (x, y) auf dem Einheitskreis, dessen Koordinaten x und y durch die Kreisfunktionen
x = x(t) = cos t “Cosinus”
y = y(t) = sin t “Sinus”
gegeben sind.
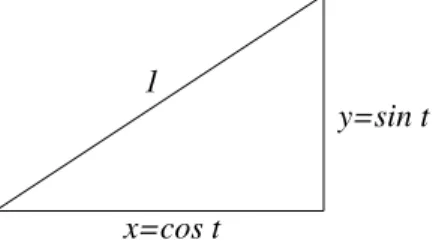
Eigenschaften:
1. Wertebereich
| cos t | ≤ 1
| sin t | ≤ 1
1
x=cos t
y=sin t
Abbildung 3.3: Das rechtwinklige Dreieck aus dem Einheitskreis cos
2t + sin
2t = 1 Satz von Pythagoras
2. Periodizit¨ at:
cos t = cos(t + 2π) = cos(t + k · 2π)
sin t = sin(t + k · 2π) mit k ∈ Sinus und Cosinus sind periodisch mit der Periode 2π.
Allgemein heißt eine Funktion periodisch mit Periode T , wenn gilt f (x) = f (x + T )
x
−1 1
y
Abbildung 3.4: Die periodischen Fuktionen Sinus (durchgezogene Linie) und Cosinus (gestri- chelte Linie)
t 0 π/2 π 3π/2 2π π/6 π/4 π/3
sin t 0 1 − 1 − 1 0 1/2 1/ √ 2 √
3/2
cos t 1 0 0 0 1 √
3/2 1/ √
2 1/2
3. Symmetrie:
Es gilt:
sin t = − sin( − t) ungerade cos t = cos( − t) gerade
sin(t + π/2) = cos t cos(t + π/2) = − sin t Cosinus und Sinus sind zueinander um π/2 verschoben.
Polarkoordinaten
y
x r
P ϕ
Abbildung 3.5: Der Punkt P
“Pol” bei (0, 0), Polarachse bzgl. der der Winkel ϕ definiert wird.
Ublicherweise ist ¨ − π < ϕ ≤ π.
P = P (r, ϕ) = P (x, y)
Die Umrechnung von kartesischen Koordinaten in Polarkoordinaten erfolgt ¨uber x = r cos ϕ
y = r sin ϕ mit
r
2= x
2+ y
2r = )
x
2+ y
2Beispiel 3.9
kartesisch(x, y) polar(r, ϕ) (1, 1) ( √
2, π/4)
(0, 3) (3, π/2)
Additionstheoreme
Satz 3.3 F¨ur alle x, y ∈ gilt
(1) sin(x + y) = sin x cos y + cos x sin y (2) cos(x + y) = cos x cos y − sin x sin y Beweis von (2):
P
Q x
y
Abbildung 3.6: Skizze der Punkte Wir betrachten zwei Punkte P und Q mit den Koordinaten
P = (1, 0)
Q = (cos(x + y), sin(x + y))
Der Abstand d zwischen zwei Punkten A = (x
a, y
a) und B = (x
b, y
b), genauer gesagt ihr Abstandsquadrat d
2berechnet sich aus
d
2(A, B) = (x
a− x
b)
2+ (y
a− y
b)
2F¨ur P und Q ergibt sich also
d
2(P, Q) = (1 − cos(x + y))
2+ (0 − sin(x + y))
2= 1 − 2 cos(x + y) + cos
2(x + y) + sin
2(x + y)
= 2 − 2 cos(x + y) (3.5)
Nun nehmen wir eine Drehung der Koordinaten vor.
Der Abstand d ¨andert sich dabei nicht.
(P, Q) → (P
′, Q
′) d
2(P, Q) = d
2(P
′, Q
′) Die neuen Koordinaten der Punkte P
′und Q
′lauten
P
′= (cos(x), − sin(x))
Q
′= (cos(y), sin(y))
Die Formel f¨ur das Abstandsquadrat in den neuen Koordinaten lautet d
2= (cos x − cos y)
2+ (sin y + sin x)
2= cos
2x + cos
2y − 2 cos x cos y + sin
2x + sin
2y + 2 sin x sin y
= 2 − 2 cos x cos y + 2 sin x sin y (3.6)
Da sich das Abstandsquadrat durch die Koordinatendrehung nicht ¨andert, muss Gl. (3.5) und (3.6) ¨ubereinstimmen:
2 − 2 cos(x + y) = 2 − 2 cos x cos y + 2 sin x sin y woraus sich ergibt
cos(x + y) = cos x cos y − sin x sin y (3.7)
Beweis von (1):
Wie gezeigt gilt
cos(x + π
2 ) = − sin x sin(x + π
2 ) = cos x Daraus folgt
sin(x + y) = − cos(x + y + π 2 )
= − cos x cos(y + π
2 ) + sin x sin(y + π 2 )
= cos x sin y + sin x cos y (3.8)
Man kann mit Hilfe der Additionstheoreme noch mehr Beziehungen zeigen, z. B.:
sin(2x) = 2 cos x sin x
cos(2x) = cos
2x − sin
2x
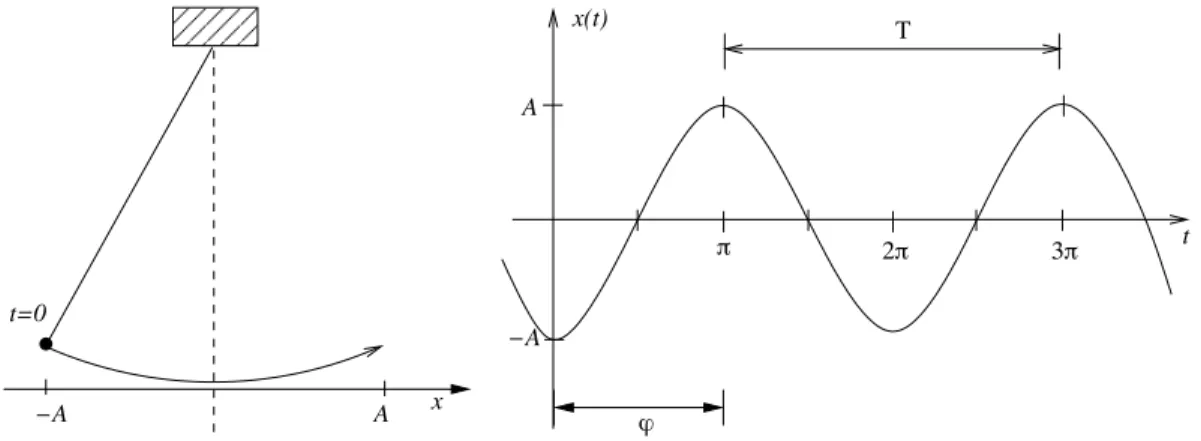
Harmonische Schwingungen
Sinus und Cosinus sind nicht nur rein mathematische Konstrukte. Mit ihrer Hilfe lassen sich auch viele nat¨urliche Ph¨anomene beschreiben, unter anderem harmonische Schwin- gungen.
−A A x
t=0
A
−A x(t)
t
ϕ
π 2π 3π
T
Abbildung 3.7: Bewegung des Pendels im Raum und mit der Zeit Eine harmonische Schwingung wird beschrieben durch die Gleichung
x(t) = A · cos(ωt + ϕ) t : Zeit
A : Amplitude (Maximalauslenkung) ϕ : Phase (F¨ur x(0) = − A ist ϕ = π)
ω : Kreisfrequenz (Anzahl der Schwingungen im Zeitintervall 2π) T : Periode (Schwingungsdauer)
Es gilt
ω = 2π
T
Tangens- und Cotangensfunktionen
Neben Sinus und Cosinus gibt es noch zwei weitere Winkelfunktionen.
Definition 3.5 Tangens:
x *−→ tan x = sin x cos x wobei f¨ur den Definitionsbereich gilt
= / { Nullstellen des cos }
= / {± π 2 , ± 3 π
2 , ± 5 π 2 , . . . } Cotangens:
x *−→ cot x = cos x
sin x = 1 tan(x) wobei f¨ur den Definitionsbereich gilt
= / { Nullstellen des sin }
= / { 0, ± π, ± 2π, . . . }
Periodizit¨ at
Sinus und Cosinus sind 2π-periodisch. Gilt dies auch f¨ur Tangens bzw. Cotangens?
Wegen
tan(x + π) = sin(x + π)
cos(x + π) = − sin x
− cos x = tan x sind Tangens und Cotangens (Beweis analog) also π-periodisch.
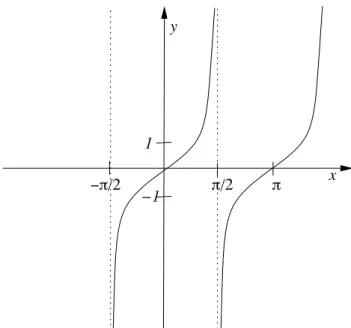
Aus der Wertetabelle f¨ur den Tangens
x 0 π/4 − π/4 → π/2 − ε → − π/2 + ε → π/2 + ε → − π/2 − ε
tan x 0 1 − 1 + ∞ −∞ −∞ + ∞
erhalten wir den Graphen
y
x 1
−π/2 −1 π/2 π
Abbildung 3.8: Die Tangens-Funktion
Analog bekommen wir f¨ur den Cotangens:
x π/2 π/4 3π/4 0 + ε 0 − ε π − ε π + ε
cot x 0 1 − 1 + ∞ −∞ −∞ + ∞
1
−1
t cot t
−π/2 π/2 π
Abbildung 3.9: Die Cotangens-Funktion
Die Umkehrfunktion der Kreisfunktion
Die Umkehrung ist nur in beschr¨ankten Definitionsbereichen m¨oglich.
x
−1 1
y
Abbildung 3.10: Die periodischen Funktionen Sinus (durchgezogene Linie) und Cosinus (gestri- chelte Linie)
Die ¨ubliche Wahl des Definitionsbereiches ist
− π
2 ≤ x ≤ + π
2 f¨ur sin x
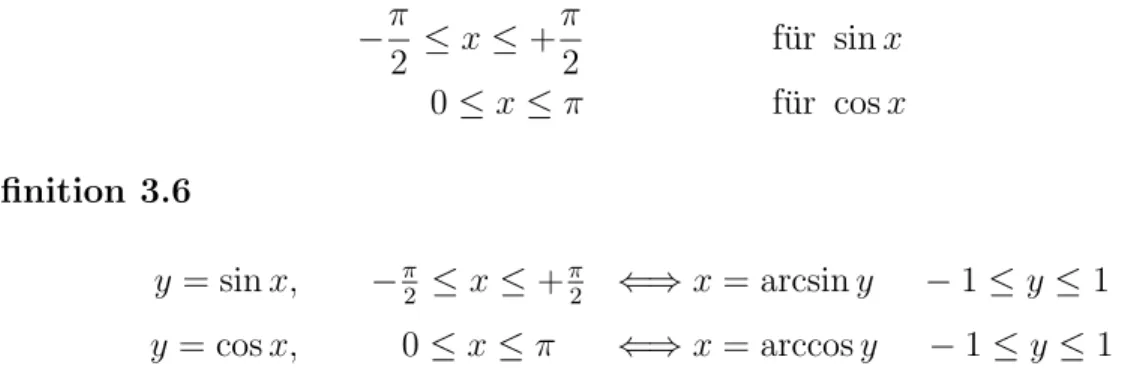
0 ≤ x ≤ π f¨ur cos x Definition 3.6
y = sin x, −
π2≤ x ≤ +
π2⇐⇒ x = arcsin y − 1 ≤ y ≤ 1 y = cos x, 0 ≤ x ≤ π ⇐⇒ x = arccos y − 1 ≤ y ≤ 1 Die entstehenden Funktionen nennt man Arcus- oder zyklometrische Funktionen.
x y
1
−1
arc sin x
y
1 x
−1
arc cos x
−π/2 π/2
π/2
Abbildung 3.11: Die periodischen Fuktionen Arcsinus und Arccosinus
Beispiel 3.10 t = arcsin x bedeutet: t ist der Winkel im Bogenmaß, dessen Sinus den
Wert x besitzt. So ist arcsin 0 = 0, arcsin 1 = π/2 und arccos 0 = π/2.
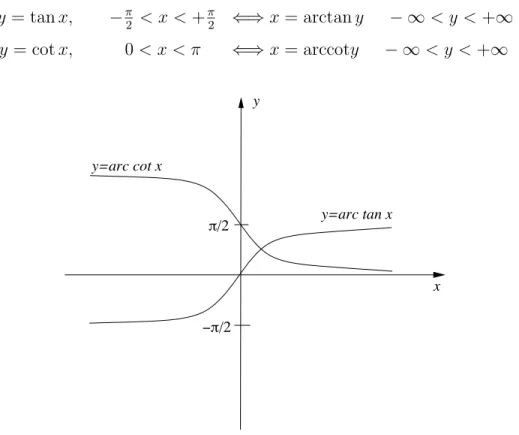
Die Umkehrung von Tangens und Cotangens verl¨auft analog.
x
cot t=cos x/sin x tan x=sin x/cos x y
−π/2 π/2 π