manipulation with mobile robots
DISSERTATION
submitted in partialfulllment
of the requirements forthe degree
Doktor Ingenieur
(Dotor of Engineering)
inthe
Faulty of EletrialEngineering and InformationTehnology
atTU Dortmund University
by
Dipl.-Ing. Thomas Nierobish
Shwäbish Gmünd, Germany
Date of submission: 21th January2014
First examiner: Univ.-Prof. Dr.-Ing. Prof. h.. Dr. h.. Torsten Bertram
Seond examiner: Univ.-Prof. Dr.-Ing. Bernd Tibken
Date of approval: 22th June 2015
frontier, it is exiting and disorganised; there is often no reliable
authority to appeal to - many useful ideas have no theoretial
grounding, and some theories are useless in pratie."
Forsyth and Pone
Authors fromComputer Vision: A Modern Approah
Inthe future, autonomousservierobots are supposed toremovethe burden of monotoni
and tedioustasks like pikup and delivery from people. Vision being the most important
human sensor and feedbak system is onsidered to play a prominent role in the future
of robotis. Robust tehniques for visual robot navigation, objet reognition and vision
assisted objet manipulation are essential in servie robotis tasks. Mobile manipulation
in servie robotis appliations requires the alignment of the end-eetor with reognized
objets of unknown pose. Image based visual servoing provides a means of model-free
manipulationof objetssolely relying on2D image information.
In this thesis ontributions to the eld of deoupled visual servoing for objet manipula-
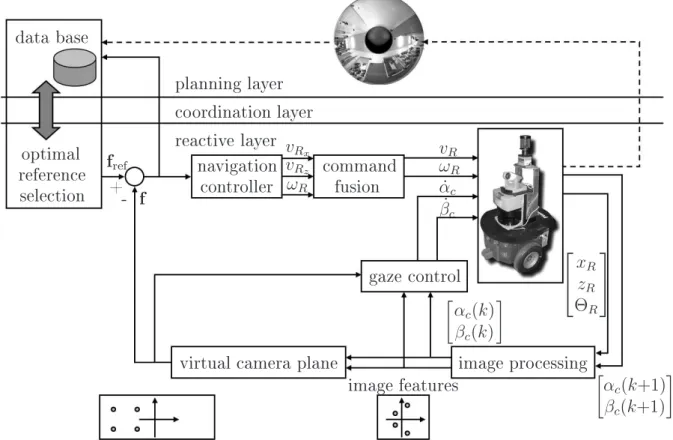
tion as well as navigation are presented. A novel approah for large view visual servoing
of mobilerobots is presented by deoupling the gaze and navigation ontrol via a virtual
amera plane, whih enables the visual ontroller to use the same naturallandmarks e-
iently over a largerange of motion. In order toomplete the repertoire of reative visual
behaviors an innovative door passing behavior and an obstale avoidane behavior using
omnivision are designed. The developed visual behaviors represent a signiant step to-
wards the model-free visual navigation paradigm relying solely on visual pereption. A
novelapproahfor visualservoing based onaugmented image featuresis presented, whih
hasonlyfouro-diagonalouplingsbetweenthevisualmomentsandthedegreesofmotion.
As the visual servoing relies on unique image features, objet reognition and pose align-
mentof the manipulator relyonthe same representation of the objet. Inmany senarios
the features extrated in the referene pose are only pereivable aross a limited region
of the work spae. This neessitates the introdutionof additional intermediate referene
views of the objet and requires path planning in view spae. In this thesis a model-free
approah for optimal large view visual servoing by swithing between referene views in
order tominimizethe time toonvergene is presented.
The eieny and robustness of the proposed visual ontrolshemes are evaluated inthe
virtualrealityandontherealmobileplatformaswellasontwodierentmanipulators. The
experimentsareperformedsuessfullyindierentsenariosinrealistioeenvironments
withoutanyprior struturing. Therefore thisthesis presentsamajor ontributiontowards
visionas the universal sensor for mobile manipulation.
Autonome Servieroboter sollen in Zukunft dem Menshen monotone und körperlih an-
strengendeAufgaben abnehmen,indemsiebeispielsweiseHol-undBringedienste ausüben.
Visuelle Wahrnehmung ist das wihtigste menshlihe Sinnesorgan und Rükkopplungs-
systemundwirddahereineherausragendeRolleinzukünftigenRobotikanwendungenspie-
len. Robuste Verfahren für bildbasierte Navigation, Objekterkennung und Manipulation
sind essentiell für Anwendungen in der Servierobotik. Die mobile Manipulation in der
Servierobotik erfordert die Ausrihtung des Endeektors zu erkannten Objekten in un-
bekannterLage. DiebildbasierteRegelungermöglihteinemodellfreieObjektmanipulation
allein durh Berüksihtigung der zweidimensionalen Bildinformationen.
ImRahmendieserArbeitwerdenBeiträgezurentkoppeltenbildbasiertenRegelungsowohl
fürdieObjektmanipulationalsauhfürdieNavigationpräsentiert. EinneuartigerAnsatz
für die bildbasierte Weitbereihsregelung mobiler Roboter wird vorgestellt. Hierbei wer-
dendieBlikrihtungs-undNavigationsregelungdurheinevirtuelleKameraebeneentkop-
pelt, was es der bildbasierten Regelung ermögliht, dieselben natürlihen Landmarken ef-
zientübereinenweitenBewegungsbereihzuverwenden. UmdasRepertoiredervisuellen
Verhalten zu vervollständigen, werden ein innovatives Türdurhfahrtsverhalten sowie ein
HindernisvermeidungsverhaltenbasierendaufomnidirektionalerWahrnehmungentwikelt.
DieentworfenenvisuellenVerhaltenstelleneinenwihtigenShrittinRihtungdesParadig-
mas derreinenmodellfreienvisuellenNavigationdar. Einneuartiger Ansatzbasierend auf
BildmerkmalenmiteinererweitertenAnzahlvonAttributenwirdvorgestellt,dernaheiner
Entkopplung der Eingangsgröÿen nur vier unerwünshte Kopplungen zwishen den Bild-
momenten und den Bewegungsfreiheitsgraden aufweist. In vielen Anwendungsszenarien
sinddieextrahiertenReferenzmerkmalenurineinembegrenztenBereihdesArbeitsraums
sihtbar. Dieserfordert dieEinführungzusätzliher Zwishenansihten des Objektessowie
eine Pfadplanung im zweidimensionalen Bildraum. In dieser Arbeit wird deswegen eine
modellfreieMethodikfürdiezeitoptimalebildbasierteWeitbereihsregelungpräsentiert,in
der zwishen den einzelnen Referenzansihten umgeshaltet wird, um die Konvergenzzeit
zu minimieren.
DieEzienzundRobustheitdervorgeshlagenenbildbasiertenReglerwerdensowohlinder
virtuellenRealität alsauh auf der realenmobilen Plattformsowie zweiuntershiedlihen
Manipulatorenveriziert. DieExperimentewerdeninuntershiedlihenSzenarieninalltäg-
lihen Büroumgebungen ohne vorherige Strukturierung durhgeführt. Diese Arbeit stellt
einen wihtigenShritt hin zu visuellerWahrnehmung alseinzigerund universeller Sensor
für diemobile Manipulationdar.
1 Introdution 1
1.1 Mobile manipulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Relatedwork . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Objetive of this thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 State of the art of omputer vision and visual servoing 11 2.1 Perspetive amera,multiple-viewgeometry and omnivision . . . . . . . . 11
2.2 Robustpointfeature detetion for reognition . . . . . . . . . . . . . . . . 14
2.3 Visualnavigation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4 Image-based visualservoing . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.5 Experimental systems for visualservoing, navigation and loalization . . . 27
3 From vision guided to visual navigation of mobile robots 29 3.1 Vision-guidednavigation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.1.1 Planning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.1.2 Topologial loalization. . . . . . . . . . . . . . . . . . . . . . . . . 31
3.2 Visualbehavior fordoor passing . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3 Visualbehaviors forollision-freenavigation . . . . . . . . . . . . . . . . . 36
3.3.1 Corridorentering . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.3.2 Obstale avoidane by optialow . . . . . . . . . . . . . . . . . . 36
4 Global visual homing by visual servoing 43
4.1 Generalonept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.2 Virtual ameraplane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.3 Cameragaze ontrol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.4 Visualnavigation ontrol . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.4.1 Controlby image Jaobian . . . . . . . . . . . . . . . . . . . . . . . 51
4.4.2 Controlwith imagemomentsand primitivevisual behaviors . . . . 53
4.4.3 Controlwith homography . . . . . . . . . . . . . . . . . . . . . . . 56
4.4.4 Experimentalresults . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.5 Comparisonof vision guidedand visual navigation. . . . . . . . . . . . . . 60
5 Loal visual servoing with generi image moments 63 5.1 Augmented pointfeatures . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.2 Generimoments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.2.1 Moments for rotation . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.2.2 Moments for translation . . . . . . . . . . . . . . . . . . . . . . . . 68
5.2.3 Coupling analysis of the sensitivity matrix . . . . . . . . . . . . . . 73
5.3 Positioningin 4DOF with augmented point features . . . . . . . . . . . . 74
5.3.1 Controlleroptimization . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.3.2 Simulationand experimentalresults . . . . . . . . . . . . . . . . . . 78
5.4 Positioningin simulationsin 6DOF with augmented point features . . . . 79
5.5 Alternative: Visualservoing on avirtual amera plane . . . . . . . . . . . 80
5.6 Analysisand onlusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
6.1 Stability analysis dependingon feature distribution . . . . . . . . . . . . . 88
6.2 Optimalreferene imageseletion . . . . . . . . . . . . . . . . . . . . . . . 91
6.2.1 Controlriteria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
6.3 Navigation inthe imagespae . . . . . . . . . . . . . . . . . . . . . . . . . 94
6.4 Experimental results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
6.4.1 Navigation aross a spherewithin the virtual reality . . . . . . . . . 99
6.4.2 Navigation aross a semi ylinder with a5 DOFmanipulator . . . . 99
6.4.3 Navigation aross a uboid with a6 DOFmanipulator . . . . . . . 101
6.5 Alternative: Model-free pose estimation withloalvisualservoing . . . . . 103
6.6 Evaluationand onlusion . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
7 Conlusions and future work 111
A Analysis of the grid-based time to ontat from optial ow 115
B Analysis of the sensitivity matrix 119
Bibliography 123
Aknowledgements 138
The abbreviations used within the sope of this work are ordered alphabetially in the
following.
ARIA AdvanedRobotInterfae for Appliations
ARNL AdvanedRobotis Navigationand Loalizationsystem
a.u. arbitrary units
AUTOSAR AUTomotiveOpen SystemARhiteture
BRIEF Binary Robust Independent Elementary Features
CAD Computer-Aided Design
CMAES Controlled Model-AssistedEvolution Strategy
CV Current View
DBRVS Distane-Based Referene View Seletion
DOF Degree Of Freedom
DoG Dierene of Gaussian
EKF Extended KalmanFilter
FAST Features fromAelerated SegmentTest
FCRVS Fixed Convergene RefereneView Seletion
FSI Fixed Sale Interpolation
GFTT GoodFeatures ToTrak
GF-HOG GradientField-Histogramof Oriented Gradients
GLOH GradientLoationand OrientationHistogram
GV Goal View
HIL Hardware In the Loop
HOG Histogramof Oriented Gradients
IBVS Image-Based Visual Servoing
IR InfraRed
LQR Linear Quadrati Regulator
MAES Model-AssistedEvolution Strategy
NN Neural Network
ORB Oriented FAST and RotatedBRIEF
ORVS Optimal Referene View Seletion
PBVS Position-Based Visual Servoing
PD ProportionalDierential
PTZ Pan TiltZoom
RANSAC RANdom SAmpleConsensus algorithm
RMSE RootMean Square Error
ROS RobotOperating System
RV Referene View
SIFT Sale InvariantFeature Transformation
SII Sale InvariantInterpolation
SLAM Simultaneous LoalizationAnd Mapping
SNN Single NearestNeighbor
SURF Speeded Up Robust Features
ToF Time of Flight
tt time to ontat
VSLAM Visual SimultaneousLoalizationAndMapping
WANN Weighted Average among three NearestNeighbors
In the present work vetors and matries are printed in bold type. Vetors are hereby
displayed by minusule letters whereas matries are represented by apital letters, and
salars are expressed in itali style. The nomenlature is sorted as following: the rst
lassiationriterionislatin beforegreek letters,afterwards lower-asebeforeupper-ase
letters, and nallyboldbeforeitalitype.
a
ontrolation (for appearane based visualservoing)a
h saling fator (for homography)a
i, b
i distaneofaninterestpointtoitsappropriateepipolarlineorresponding to theu
- andv
-diretion, respetivelya
k pixel displaementa
m, b
m, c
m, d
m modelparameters for exponentialfuntionA Hesse matrix
α
rotation aroundthex
-axis (roll)α
a orretion fator forthe adaptive imageJaobianα
c, α ˙
c amera pan angle, respetively veloityα
ia, β
ia, γ
ia interior anglesα
u, α
v intrinsi amera parameter: saling fator depending onλ
and pixel di-mensions
bCref image features inthe refereneframe
β
rotation aroundthey
-axis(pith)β
c, β ˙
c amera tiltangle, respetivelyveloityc
performane riterionconf
avg mean of the ondene valuesconf
seg(i,j) ondene values ina windowwiththe rowand olumnposition(i, j)
ofthe ell
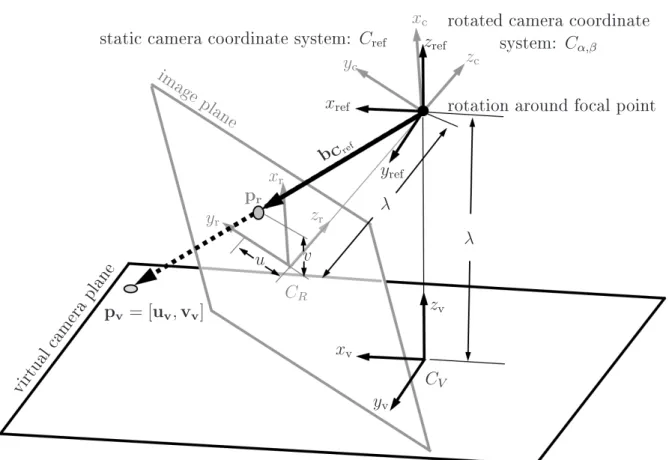
C, C
n, C
r absolute, normalizedand relativenumberoffeature orrespondenes be- tween the referene viewand the urrent imageC
ref, C
α,β, C
R stati and rotated amera oordinate systems, respetively, and amera oordinate system inthe imageplaneC
V virtual amera oordinatesystem, respetively virtual ameraplane CVii
-th refereneviewd
kp normalized keypoint desriptor of SIFT featuresd
distaneD
Dierene-of-Gaussian∆f
error between desired and atualfeature loations∆ ˆ f
total normalized summedfeature error∆f
γ orretion alongγ
of the averaged keypoint rotation∆f
ω, ∆f
ω predited motion of the image features ausedby∆Θ
R∆ϕ
feature error between referene and urrent distortion (amera retreatproblem)
∆Θ
R orientationaltask spae error∆x
lateral task spae error∆z
longitudinal taskspae error[e
1a, e
2a]
T epipoles from the atual image[ e
1ref, e
2ref]
T epipoles from the desiredviewE essentialmatrix desribing the epipolaronstraint
E(θ), ¯ E(φ), ¯ E(r) ¯
mean absolute errorin azimuth, elevation and radiusE
u, E
v entropy along theu
- andv
-axis, respetivelyε
residual error between model and data point (for error funtion of theM-estimator)
ε
d dissimilarity(residualerror)ε
γ estimation error for amerarotationη
1, η
2 tuning variablesf
urrent image features, stated depending on the ontext asf
i= [u
i, v
i]
for the
i
-thimage featurewith oordinatesu
i, v
i, inthe ontext ofSIFTfeatures as
f
i= [u
i, v
i, φ
i, σ
i]
with the additional attributes orienta-tion
φ
i and saleσ
i, also in the ontext of image moments asf = [f
α, f
β, f
γ, f
x, f
y, f
z]
f
ref referene image features, alsoused inthe ontext of image momentsf
α image moment for rotationaroundthex
-axisf
β image moment for rotationaroundthey
-axisf
γ image moment for rotationaroundthe optialaxisf
x image moment for translationalong thex
-axisf
y image moment for translationalong they
-axisf
z image moment for translationalong the amera axisf
zd image momentfor translation alongthe ameraaxis, alternativeexpres- sion via the distane between pointfeaturesF
ost funtionG Gaussian lter
γ
rotation aroundthez
-axis (yaw), respetively the optialamera axisγ
t angle between orientationof virtual amera planeand templateplaneγ
V angle between the virtual ameraplane and the orientationof the roboth
twie the distane between the parabola's vertex and the fous of anomnidiretionalamera
H
,Hˆ
homography, estimated homography by feature orrespondenesH
u(i)
relative frequeny of features ini
-tholumnH
v(i)
relative frequeny of features ini
-throwI urrent image, alsodenoted as
I(u, v, t)
in dependene of the pixeloor-dinates
u, v
and timet I
ref referene image[I
u, I
v]
T spatial intensity gradient inu
- andv
-diretion, respetivelyJ
visual imageJaobianJ
+ pseudoinverse of the imageJaobianJ
a Jaobian for appearane based visualservoingJ
e Jaobian for visualservoing on epipolesJ
vω separated Jaobian for rotationalmotionJ
vt separated Jaobian for translationalmotionJ
vξuξ separated Jaobian for angleand axisof rotation parametrizationJ
xz separated Jaobian for translational motion, redued to two degrees of freedomJ
dk robot Jaobianfor dierential kinematisJfi image Jaobian forthe imagemomentin
i
, whereasi
stands forx
,y
,z
,α
,β
,γ
J
fi,j image Jaobian entry for the image moment ini
with a movement inj
, whereas bothi
andj
stand forx
,y
,z
,α
,β
,γ
andi = j
(desiredouplings)
J ˜
fi,j image Jaobian entry for the image moment ini
with a movement inj
,whereas both
i
andj
stand forx
,y
,z
,α
,β
,γ
andi 6= j
(undesiredouplings)
J
ω separated Jaobian for rotationalmotion,redued toone degree of free-dom
k
onstant proportionalgaink
a adaptive gaink
proportionalgain fatorK amera alibration matrix as afuntion of the intrinsi ameraparame-
ters
l
k image displaementL Gaussian-blurred image
λ
foallengthλ
e evaluated individualsofλ
-CMAESλ
eig eigenvalueλ
i Lagrange multiplierλ
p ospring ofλ
-CMAESµ
ontrolparameter for Levenberg-Marquardt optimizationµ
(i,j) meanofthetimetoontatvaluesinasegmentwiththerowandolumnposition