Research Collection
Working Paper
Traglast und optimale Bemessung von Platten
Author(s):
Wolfensberger, Rudolf Publication Date:
1964
Permanent Link:
https://doi.org/10.3929/ethz-a-000747192
Rights / License:
In Copyright - Non-Commercial Use Permitted
This page was generated automatically upon download from the ETH Zurich Research Collection. For more
information please consult the Terms of use.
Traglast
und optimale Bemessung
von
Platten
R.
Wolfensberger
/ bk
Archivexemplar:
Bild und Grafik, Standort E 36.1
Zürich 1964
Bericht Nr. 2
Traglast
und optimale Bemessung
von Platten
von
R. WOLFENSBERGER, Dt.
sc.techn.
Technische Forschungs- und Beratungsstelle 1964
der Schweizerischen Zementindustrie, Wildegg
Leer
-Vide
-Empty
Vorwort
Die üblichen Methoden
zurBerechnung
vonStahlbetonplatten basieren
auf der Elastizitätstheorie. Für einfache Fälle liegen analytische Metho¬
den
vor.Im allgemeinen müssen jedoch numerische Verfahren oder
Modellmessungen angewendet werden. Neben den Schwierigkeiten
dieser Methoden stellt sich im weiteren die Frage ihrer Zweckmäßigkeit.
Es scheint wenig sinnvoll, das Tragvermögen einer Stahlbetonplatte auf
Grund einer nominellen Spannungsspitze
vonoft rein lokaler Bedeu¬
tung beurteilen
zumüssen.
Daher sind Methoden entwickelt worden, die das unelastische Material¬
verhalten in der Bestimmung der Tragfähigkeit
zuberücksichtigen
ver¬suchen. Die Plastizitätstheorie hat gezeigt, daß das vornehmlich intuitiv
hergeleitete Bruchlinien-Verfahren obere Grenzwerte der Traglast liefert
und somit
zueiner Überschätzung der Tragfähigkeit führen kann. Bisher ist noch keine allgemeine Methode bekannt geworden,
umfür Platten
untere
Grenzwerte der Traglast
zubestimmen.
In der vorliegenden Arbeit wird eine solche Methode hergeleitet. Das
Problem ist
soformuliert worden, daß die mathematische Methode der linearen Programmierung
zurLösung herangezogen werden kann.
Letztere wird heute bereits umfassend auf dem Gebiete des «Operation
Research» angewendet und
vorallem
zurLösung
vonWirtschaftspro¬
blemen herangezogen. In der Technik und im speziellen in der Baustatik hat sie bisher wenig Bedeutung gefunden. Es ist aber
zuerwarten, daß sie in vermehrtem Maße
zurBehandlung der Probleme über die Traglast
und die optimale Bemessung herangezogen werden muß.
Institut für Baustatik (Abteilung Massivbau) Eidgenössische Technische Hochschule, Zürich
1. Juni 1964 Prof. Dr. Bruno Thürlimann
Die vorliegende Arbeit wurde
vomVerfasser
amInstitut für Baustatik
(Abteilung Massivbau) ausgearbeitet und als Dissertation eingereicht.
An dieser Stelle möchte
erdem Referenten, Herrn Prof. Dr. B. Thürli¬
mann, für seine wertvollen Ratschläge bestens danken. Herrn Prof. Dr.
H. Ziegler dankt
erfür die Übernahme des Korreferats, sowie für seine ständige Anteilnahme
amFortgang der Abhandlung. Der «Technischen
Forschungs- und Beratungsstelle in Wildegg» und der «Stiftung für systematische wissenschaftliche Forschungen auf dem Gebiete des Betons und des Eisenbetons» ist
erfür die Drucklegung dieser Arbeit
zuDank verpflichtet.
R. Wolfensberger
Inhaltsverzeichnis
/.
Einleitung 7
2.
Grundlagen 9
2.1 Voraussetzungen 9
2.2 Grenzwertsätze 12
2.3 Übersicht der bestehenden Arbeiten 14
3. Generelle Gedanken
zumVorgeben 16
3.1 Bestimmung der Traglast 16
3.2 Bestimmung der optimalen Armierung 24
3.3 Zusammenfassung 33
4.
Plastizitätsbedingungen 34
4.1 Plastifizierung eines Plattenbereichs 34
4.2 Orthogonale Armierung 34
4.2.1 Plastizitätsbedingungen 34
4.2.2 Lineare Plastizitätsbedingungen 50
4.2.3
Graphische Darstellung der Plastizitätsbedingungen 52
4.3 Armierung
inbeliebiger Richtung 58
4.3.1 Plastizitätsbedingungen
584.3.2 Allgemeine lineare Plastizitätsbedingungen 67
5.
Gleichgewichtszustände für Platten 68
5.1 Gleichgewichtsbedingungen 68
5.2 Randbedingungen 72
5.2.1 Freier Rand 72
5.2.2 Einfach gelagerter Rand
745.2.3 Eingespannter Rand 75
5.3 Gleichgewichtszustände für spezielle Belastungsverteilung 76
5.3.1 Voraussetzungen 76
5.3.2
Endlichfach
statisch unbestimmtesSystem
775.3.3 Näherung des Momentenverlaufes 78
6.
Erfüllen der Plastizitätsbedingungen 80
7.
Traglast
einerPlatte (Analysis) 82
7.1 Lösungsweg
827.2
Fehlerbetrachtungen 83
7.3 Beispiel 85
8.
Minimalarmierung
einerPlatte (Bemessung) 99
8.1 Lösungsweg 99
8.2 Fehlerbetrachtungen 102
9. Zusammenstellung der berechneten Beispiele 103
10. Scblußbemerkmg 110
//.
Anhang 112
11.1 Einschreiben und Umschreiben der Momentenfläche 112 11.2 Lösung des linearen Programms
mitHilfe eines speziellen
Maschinenprogramms 113
11.3 Genauigkeit der Lösung eines linearen Programms 115
1. Einleitung
Die meisten der heute bekannten Lösungen
zurBerechnung der Trag¬
fähigkeit einer Stahlbetonplatte beruhen auf der Bruchlinientheorie. Die
erste
wichtige Arbeit darüber hat Johansen [1; S. 277] im Jahre 1932
veröffentlicht. Drucker, Greenberg, Prager, Hodge [2, 3,4] und Hill [5]
gelang es, die beiden fundamentalen Grenzwertsätze der Plastizitäts¬
theorie aufzustellen und
zubeweisen. Anhand dieser Sätze kann gezeigt werden, daß alle auf der Bruchlinientheorie aufgebauten Lösungen eine Belastung ergeben, die größer oder gleich der Traglast ist und daher im allgemeinen die Traglast überschätzt.
Zur Berechnung der Traglast ist
esnotwendig, die tatsächlich auftretende
Bruchlinienkonfiguration
zufinden. Fast alle
neuerenArbeiten beschäf¬
tigen sich mit dieser Aufgabe. Es hat sich gezeigt, daß dies in einfachen
Fällen schwierig und in komplizierten Fällen praktisch unmöglich ist.
In den meisten Veröffentlichungen sind
nurstark vereinfachte Bruch¬
linienbilder angegeben. So findet
manz.B. für die Traglast einer total
eingespannten Quadratplatte mit oben und
untenin
x-und y-Richtung gleicher Armierung mit Bruchlinien
nurlängs der Diagonalen eine Be-
48 mp
lastung
von .Dagegen hat neulich Wood [6; S. 177] für eine
/2
37,7 Mp
Brachlinienkonfiguration eine Belastung
vonangegeben. Der
/2 Unterschied der beiden Belastungen beträgt 27,5%.
Die vorliegende Arbeit hat
zumZiel, eine Berechnungsmethode für
Platten
zuentwickeln mit Resultaten, die in bezug auf die Traglast auf
der sicheren Seite liegen. Wird eine grobe Berechnung durchgeführt,
erhält
manein Resultat, das relativ weit
vonder Traglast entfernt ist,
aber sie dennoch unterschätzt. Mit einer Verfeinerung der Berechnungs¬
methode kann
manbeliebig genau die exakte Lösung annähern.
Als zweites wird gezeigt, daß durch kleine Umformungen der aufgestell¬
ten
Methode die minimale Armierung einer Platte für eine gegebene Be¬
lastung gefunden werden kann. Die gegebene Belastung liegt nicht
höher als die Traglast der Platte mit der gefundenen Armierung. Die
Lösung liegt demnach ebenfalls auf der sicheren Seite.
2. Grundlagen
2.1 Voraussetzungen
Die wichtigsten Voraussetzungen
zurErmittlung der Traglast nach der
einfachen Plastizitätstheorie sind:
a) Die Deformationen (vor dem Kollaps) sollen
soklein sein, daß die Gleichgewichtsbedingungen
amundeformierten System befriedigt
werden können (wie bei elastischer Behandlung).
b) Es dürfen keine Instabilitäten
vorErreichen der Traglast auftreten (wie bei elastischer Behandlung).
c) Die Einflüsse
vonQuer- und Normalkräften werden vernachlässigt.
d) Es
treten nurstatische Beanspruchungen auf (keine Wechselbean¬
spruchungen).
e) Die Lasten müssen im allgemeinen proportional zunehmen.
f) Das Material muß plastisch verformbar sein (Rotationsfähigkeit).
of-
Abb. 2.1 Spannungs-Dehnungs-Diagramm eines naturharten Armierungsstahles
(außerhalb der Einschnürungszone)
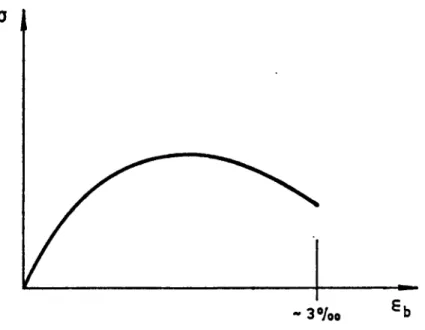
Abb. 2.2 Spannungs-Dehnungs-Diagramm
vonBeton
untereiner Biegebeanspru¬
chung
Im folgenden soll noch näher auf den Punkt f eingegangen werden. Den
Betrachtungen werden die Spannungs-Dehnungs-Diagramme für
natur¬harten Armierungsstahl und Beton (Abb. 2.1 und 2.2) zugrundegelegt.
In Abb. 2.3 ist das M-0 -Diagramm für einen normal armierten Stahl¬
betonquerschnitt dargestellt.
I Normales
u'¦• t/h
Abb. 2.3 M-0-Diagramm eines Stahlbetonquerschnittes
Es zeigt die Relation zwischen Moment und Krümmung. Bei Vernach¬
lässigung des Verfestigungsbereiches und
unterder Annahme, daß der
Hebelarm r\ h der inneren Kräfte konstant ist, geht das M-0 -Dia¬
gramm
vonAbb. 2.3 in dasjenige
vonAbb. 2.4 über. Dies entspricht gut einer normal armierten Stahlbetonplatte.
m/m,
1.o jf/jrfp
Abb. 2.4 Ideal-elastisch-plastisches M-
0-Diagramm
Das M- 0 -Diagramm in Abb. 2.4 stellt ein elastisch-ideal-plastisches Ver¬
halten dar. Durch Vernachlässigung der elastischen gegenüber den pla¬
stischen Verformungen erhält
manein starr-ideal-plastisches Verhalten (Abb. 2.5).
Die Gültigkeit der Plastizitätstheorie
setztein ideal-plastisches Verhalten
der Materialien
voraus.Dies trifft sowohl für elastisch-ideal-plastisches
wie für starr-ideal-plastisches Material
zu.In normalen Fällen genügt
esjedoch,
wenndie maximale Krümmung 0 ein Vielfaches der Vergleichs¬
krümmung 0P erreicht (Abb. 2.3). Im Stahlbau wird das Verhältnis
0J0p durch Instabilität beschränkt [7]. Im Stahlbetonbau tritt bei
zum/m,
1 -
t/h
Abb. 2.5 Starr-ideal-plastisches M-0-Diagramm
stark armierten Querschnitten frühzeitig ein Stauchen der Betondruck¬
zone
ein. Durch Begrenzen des Armierungsgehaltes fimax kann dies
ver¬hindert werden. Ein schlagartiger Bruch kann durch einen minimalen
Armierungsgehalt /*»» vermieden werden.
Ein solches Versagen kann eintreten,
wenndas Rißmoment des homo¬
genen Betonquerschnittes bei Einrechnung der Zugfahigkeit des Betons größer ist als das plastische Moment des gerissenen Stahlbetonquer¬
schnittes.
2.2 Gren%rvertsäti?e der Plastizitätstheorie
Die strenge Lösung eines Plattenproblems nach der Plastizitätstheorie ist im allgemeinen kaum möglich. Nur in ganz speziellen Fällen gelingt es,
die statischen und die kinematischen Bedingungen über den ganzen
Plattenbereich
zuerfüllen. Aus diesem Grund kommt den beiden Grenzwertsätzen eine große praktische Bedeutung
zu.Mit ihrer Anwen¬
dung gelingt es, die Traglast eines Systems
vonbeiden Seiten her einzu¬
schränken. Fallen die beiden Schranken zusammen,
sokennt
mandie exakte Lösung.
Die beiden Grenzwertsätze lauten nach [8], [9]:
1. Grenzwertsatz (unterer Grenzwert)
Jede Belastung, %u der sich ein stabiler, statisch zulässiger Spannungszustand
an¬geben läßt, liegt nicht hoher als die Traglast.
Eine solche Belastung stellt also eine
untereSchranke für die Traglast dar; sie liegt noch innerhalb bzw.
ander Grenze der Tragfähigkeit des Systems.
2. Grenzwertsatz (oberer Grenzwert)
Jede Belastung, zj* der sich ein instabiler, kinematisch zulässiger Bewegungszu¬
stand angeben läßt, liegt nicht tiefer als die Traglast.
Eine solche Belastung stellt also eine obere Schranke für die Traglast dar; sie liegt außerhalb bzw.
ander Grenze der Tragfähigkeit des Sy¬
stems.
Die
neuemgeführten Begriffe sollen noch kurz beschrieben werden.
Eine ausführliche Erklärung ist in [8] und [9]
zufinden.
Ein Spannungszustand wird als statisch zulässig bezeichnet,
wennuntereiner Gruppe
vonäußeren und inneren Kräften jeder Teil des betrachteten
Systems im Gleichgewicht ist. Ein solcher Spannungszustand wird stabil genannt,
wenn ankeinem Ort die Plastizitätsbedingungen verletzt
wer¬den.
Ein Bewegungszustandwird als kinematisch zulässig bezeichnet,
wenn ermit
den Bindungen des Tragwerkes verträglich ist. Ein solcher Bewegungs¬
zustand wird instabil genannt,
wenndie Leistung der äußeren Lasten
gleich (oder größer) ist als die Dissipationsleistung.
In dieser Arbeit werden ausschließlich
untereGrenzwerte der Traglast gesucht. Demnach benötigt
man nurden 1. Grenzwertsatz. Dieser kann in einer anschaulicheren Form folgendermaßen angeschrieben werden:
1. Grenzwertsatz (unterer Grenzwert)
Jede Belastung, zf* der sich ein möglicher Gleichgewichtszustandfinden läßt, dessen Schnittkräfte die Plastizitätsbedingungen
ankeinem Punkt verletzen, ist kleiner
oder höchstens gleich der Traglast.
2.3 Übersicht der bestehenden Arbeiten
Um die Traglast einer Platte
zubestimmen, existieren heute schon
ver¬schiedene Berechnungsmethoden. Es würde
zuweit fuhren, auf alle
diese verschiedenen Verfahren einzugehen. Im Buch
vonWood [6] fin¬
det
mandarüber sehr ausführliche Hinweise mit nützlichen Vergleichen
und Diskussionen.
In Tafel I wird versucht, die verschiedenen Theorien schematisch
zuordnen. Darin sind die bis heute bekannten Verfahren mager umrandet.
Die Lösungsmethoden mit linearem Programm, die erstmals in dieser
Arbeit behandelt werden, besitzen eine fette Umrandung.
I Elastizitätstheorie Fließbedingungen
durchPlastizitätsbedingungen
ersetzt NumerischeLösungen
mitlinearemProgramm Bemessung; Bestimmung
deroptimalen Armierung
PlastizitätstheoriefürPlatten
Strenge Lösungen Näherungen
UntererGrenzwertObererGrenzwertLösungen
inmathematischgeschlossener
FormGerade
Bruchlinien,
unendlichkeineTeilflächenAnalysis; Bestimmung
derTraglast
Kreisförmige
FächerBeliebige
FächerBruchlinientheorie
(Johansen)
GeradeBruchlinien,
endlicheTeilflächen3. Generelle Gedanken
zumVorgehen
Das Ziel dieser Arbeit ist, Lösungen auf der sicheren Seite, d.h.
untereGrenzwerte der Traglast
zubestimmen. Nach dem 1. Grenzwertsatz
(unterer Grenzwert) der Plastizitätstheorie muß dafür ein möglicher Gleichgewichtszustand gefunden werden, dessen Schnittkräfte
ankei¬
nem
Punkt die Plastizitätsbedingungen verletzen. Die maximale Bela¬
stung
unterallen möglichen Lösungen ist die Traglast. Das Vorgehen
soll
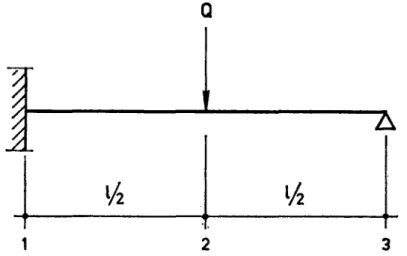
aneinem einfachen Beispiel erläutert werden. Gegeben sei ein Balken
mit konstanter Höhe, der
aneinem Ende frei aufliegt und
amanderen eingespannt ist. Er wird in der Mitte mit einer Einzellast Q belastet (Abb. 3.1).
1 2
3
Abb. 3.1 Einführungsbeispiel: Bestimmung der Traglast
3.1 Bestimmung der Traglast
Als
erstessoll bei gegebener Armierung die maximale Belastung Q ge¬
sucht werden,
zuder ein möglicher Gleichgewichtszustand existiert, des-
sen
Schnittkräfte
ankeinem Punkt die Plastizitätsbedingungen verletzen.
Diese Belastung ist gleich der Traglast Qp>
wennalle möglichen Gleich¬
gewichtszustände untersucht werden. In diesem Beispiel handelt
essich
um
einen Stahlbetonbalken mit einer konstanten Armierung über die
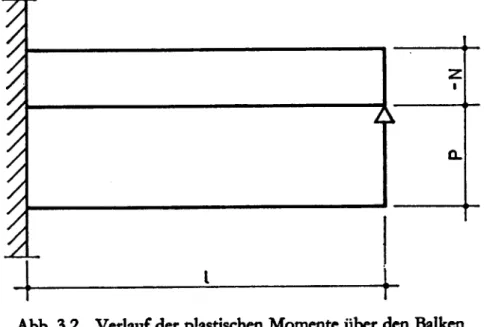
ganze Länge. Das positive plastische Moment (unten Zug) ist P; das negative plastische Moment ist
—N (oben Zug). Beide sind konstant
über die Balkenlänge (Abb. 3.2).
X
Abb. 3.2 Verlauf der plastischen Momente über den Balken
Als
ersteswählt
manals statisch bestimmtes Grundsystem den einfachen Balken und führt als überzählige Größe X das Einspannmoment
amlinken Auflager ein (Abb. 3.3).
Abb. 3.3 Grundsystem mit überzähliger Größe X
Das Moment M erhält
mandurch Superposition des Momentes Q M0 infolge der äußeren Belastung Q und des Momentes X Mx infolge der überzähligen Größe X
amGrundsystem (einfacher Balken). Darin ist
Mx das Moment
amGrundsystem infolge X
=1, und M0 das Moment
am
Grundsystem infolge Q
=1.
M
=QM0 + XMX (3.1)
Somit ist der Ausdruck für M linear in X und Q und ergibt für die
Punkte 1, 2, 3 (Abb. 3.4)
Momentenfläche
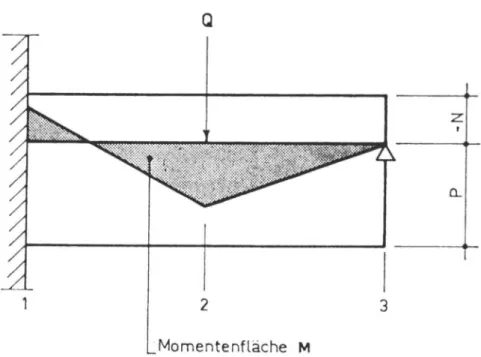
MAbb. 3.4
Darstellung
einerzulässigen Momentenfläche,
die an keinem Punkt diePlastizitätsbedingungen
verletztMx
=X
M2=y + x±-
"w4 2
M3
=0
(3.2)
Diese Momente mit den zugehörigen Auflagerreaktionen und der äuße¬
ren
Belastung Q stellen für jeden Wert
vonQ und X einen möglichen Gleichgewichtszustand dar.
Die Forderung, daß die Plastizitätsbedingungen
ankeinem Punkt
ver¬letzt werden sollen, lautet:
-N^Mi^P (3.3)
Sie ist graphisch in Abb. 3.4 dargestellt.
Beachtet man, daß das Moment zwischen den Punkten 1,2 und 3 gerad¬
linig verläuft,
sogenügt es, die Bedingung (3.3)
nur anden Punkten 1, 2 und 3
zuformulieren.
Diese lauten:
in Punkt 1: X < P
-X<N in Punkt 2:
j2t+ X± < P
Ä4
2Ä4
2(3.4)
und in Punkt 3:
-N<0<P
In Punkt 3 sind die Ungleichungen trivial. Alle Bedingungen sind in X, Q,P und N linear.
Gesucht ist natürlich die größtmögliche Belastung Q. Im vorliegenden Beispiel ist sie gleich der Traglast QPy weil alle möglichen Gleichgewichts¬
zustände durch Variation
vonXuticlQ berücksichtigt werden.
Mathematisch kann die Aufgabe folgendermaßen formuliert werden:
Gesucht ist Qmax,
sodaß die Ungleichungen (3.4), die linear in den freien Variablen -X"undj2 sind, erfüllt werden.
Eine solche Aufgabe ist ein lineares Programm und kann gelöst werden.
Ein allgemeines lineares Programm [10], [11] ist gegeben durch
mlineare
Funktionen
ji
= —J]
AikXi+ bi i= 1,2,3
m(3.5)
mit
nVariablen xi>
xn xnund eine Objektfunktion
n
Z
= -£«ixi + * (3.6)
A =l
Durch geeignete Wahl der
xakann
manZ minimal oder maximal
ma¬chen, doch müssen die j,- und ein Teil der Variablen
Xkpositiv sein.
Die Nebenbedingungen lauten also:
ein Teil
von xn> 0 (3.7)
ein Teil
von xn,ohne Bedingungen
Das lineare Programm wird in einem Schema mit transponierter Be¬
schriftung dargestellt:
jy
—z
=-XA <*ik
ajA
<*Abi
• * • •Durch kleine Umformungen können die Bedingungen des Beispiels auf
die selbe Form wie die Funktionen (3.5), (3.6) und (3.7) gebracht werden.
Die Ungleichungen (3.4) gehen in die Gleichungen (3.8) mit den Neben¬
bedingungen (3.9) über.
ji
=-X + P
j,2=+X + N
l X
J4
=+£ j +
—-+ N 2
X
T
Ji > 0; ja > 0; ja > 0; j4 > 0
(3.8)
(3.9)
Die Objektfunktion Z hat folgendes Aussehen:
Z
=£± (3.10)
Sie muß maximiertwerden. Es ist gleichgültig, ob Q oder Q— maximiert
wird.
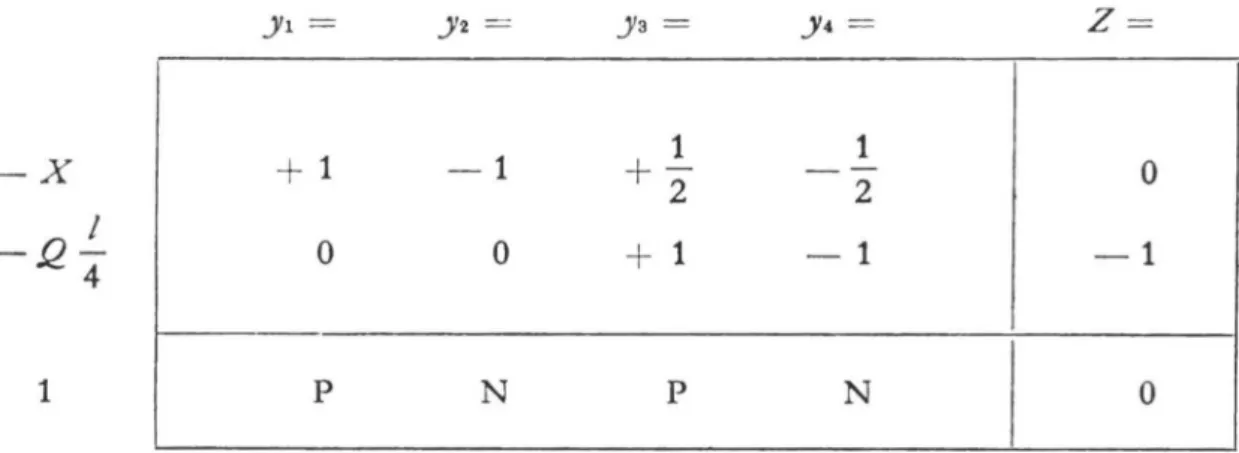
Durch Protokollieren der Funktionen (3.8) und (3.10) mit transponierter
Beschriftung erhält
mandas Schema des linearen Programms.
X
-a
Jl = yt = J3 = j« = Z =
+1
— 1X
2l 00 0 + 1 — 1 — 1
p N p N 0
Zur Veranschaulichung soll dieses lineare Programm, das zwei unab¬
hängige Variable X und Q besitzt, graphisch gelöst werden (Abb. 3.5).
Für die analytische Lösung sei auf [10] und [11] verwiesen.
QI
A
B
Abb.3.5
Graphische Lösung
des linearenProgramms
In der Ebene, gebildet durch die rechtwinkligen Koordinaten X und
Q—, istji
=0, d.h. X
=P eine Gerade, die in der Figur eingezeichnet
und mit ji bezeichnet wurde. Soll
nunim Punkt (X, Q-A
uflsereBe¬
dingung ji > 0 erfüllt werden,
somuß dieser Punkt in der Halbebene
liegen, die durch diese Gerade begrenzt wird und den Nullpunkt
ent¬hält (der Nullpunkt erfüllt diese Ungleichung). Analog ergeben die Be¬
dingungen j2 > 0, J3 > 0, j4 > 0 drei weitere Halbebenen. Ein Punkt
(Xy Q-Ay der alle vier Nebenbedingungen erfüllt, muß in dem Gebiet liegen, das diese vier Halbebenen gemeinsam haben. Dies ist das in der
Figur schraffierte Parallelogramm. Nur die Punkte im Innern und auf dem Rand dieses Parallelogramms sind in diesem Problem zulässig. Die
Funktion Z ist proportional
zumAbstand des Punktes (XyQ-A
vonder
Geraden jg—
=0. Man erkennt dies, indem
maneinige Niveaulinien Z
=
konstant dieser Funktion zeichnet. Sie verlaufen parallel der Geraden
Q—
=0. Die Extremalzüfgafoe läßt sich also folgendermaßen geome¬
trisch interpretieren:
Unter allen Punkten im Innern oder auf dem Rand des Parallelogramms
ist derjenige gesucht, der den größten Abstand
vonder Geraden j2—
=0
hat. Die Anschauung gibt die Ecke A als Lösung,
wenn manfür Q eine positive Kraft annimmt. Ist Q negativ, also aufwärts gerichtet, erhält
man
die Ecke B.
Die Koordinaten
vonA
X=-N;£±=P + ^ (3.11)
sowie die Koordinaten
vonB
(3.12)
sind die Lösungen des linearen Programms. Für eine nach
untengerich¬
tete
Belastung tritt
ander Einspannstelle ein negatives und in der Feld¬
mitte ein positives plastisches Moment auf.
Die Traglast erreicht den Wert
Qp
=(AP + IN)
(3.13)
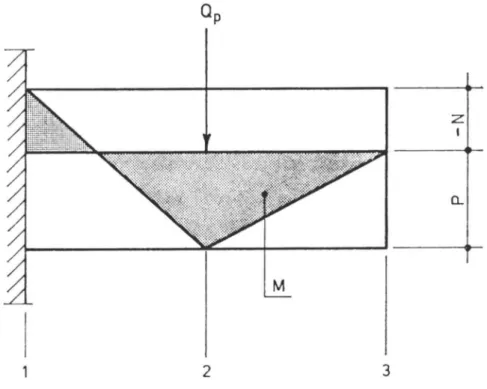
Die Momentenfläche und der Verlauf des plastischen Momentes sind
aus
Abb. 3.6 ersichtlich.
Qr
1 2 3
Abb. 3.6 Verlaufder Momentenfläche
infolge Qp
3.2 Bestimmung der optimalen Armierung
Als zweite Aufgabe soll die Größe und die Anordnung der minimalen
Armierung für eine gegebene Belastung gesucht werden. Für die gege¬
bene Belastung wird
vonallen möglichen Gleichgewichtszuständen der-
jenige gesucht, für den das kleinste Armierungsvolumen bzw. Armie¬
rungsgewicht genügt,
um anjedem Punkt die Plastizitätsbedingungen
zu
erfüllen. Die gegebene Belastung ist dann gleich der Traglast des Bal¬
kens mit der gefundenen Armierung.
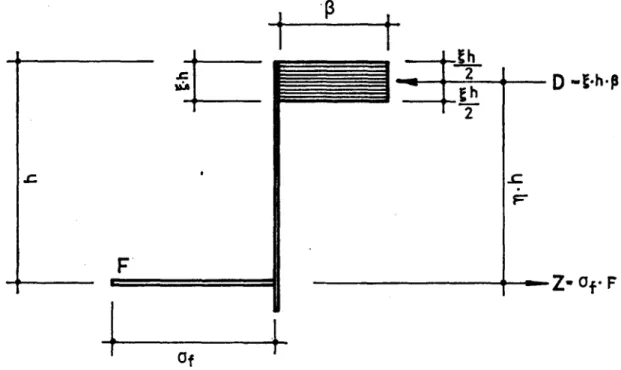
Als erstes soll die Abhängigkeit des plastischen Momentes
vonder Ar¬
mierung angegeben werden.
ß
i-IlL .iÜ
2
D -g-h-ß
¦Z-Of
FOf
Abb. 3.7 Spannungsverteilung in einem plastifizierten Stahlbetonquerschnitt infolge Mp
— rjb o/ F
Mit der in Abb. 3.7 dargestellten Spannungsverteilung in einem plastifi¬
zierten Stahlbetonquerschnitt erhält
mandas positive und das negative plastische Moment
zuP
=a/FpnpJ 'h
(3.14)
Mit der Annahme, daß rf
=rf'
=rj konstant, d.h. unabhängig
vondem Armierungsgehalt ist,
wasbei kleinem Armierungsgehalt annä¬
hernd zutrifft, erhält
mannach kleiner Umformung:
FP
=dha/
F"-d N
(3.15)
h oj 1
wobei
ci = —konstant ist. Da bei einem Tragwerk meistens
nureine
V
Armierungsstahlsorte verwendet wird und somit af
=konstant ist, gehen die Gleichungen (3.15) über in
P
1
N FP
=C2 —(3.16)
F"=C2
wobei
ci =rjo/
konstant ist. Für stückweise konstantes h,
wasin
Zukunft immer angenommen wird, erhält
manfür ein Teilstück die einfache Beziehung
FP
= "P
(3.17)
wobei
C3 =1 r\ Ofh
FN
= C3iV
konstant ist.
ASi-1
AS|ASi+1
Abb. 3.8 Verlaufvon —N und P
Stabachse
Das Gesamtvolumen Kder theoretischen Armierung beträgt:
Tragnrk
V= f (FP + FN) ds (3.18)
Für die Bedingung, daß P und N stückweise linear sind (Abb. 3.8) geht Gleichung (3.18) über in
Tragmerk
v= i S* <+ Ni+Ni+i + Pi+p'+oJj/ <3-19)
Wie im vorhergehenden Beispiel wählt
manden einfachen Balken wieder als statisch bestimmtes Grundsystem und führt als überzählige Größe X
das Einspannmoment
amlinken Auflager ein.
12 3
4Abb. 3.9 Einführungsbeispiel für die Bestimmung der minimalen Armierung
Die Momente
anden vier Intervallgrenzen (Abb. 3.9) lauten demnach:
Mi-.
=X
Mz
=^ + xT
M*. -¦fi?+4
Mi
=0
(3.20)
(3.22)
Die Forderung, daß
ankeinem Punkt die Plastizitätsbedingungen
ver¬letzt sind, ist:
-Ni^Mi^Pt (3.21)
Es wird
nundie Bedingung gestellt, daß P und
—iV stückweise linear sind (Abb. 3.8).
Damit genügt es, die Plastizitätsbedingungen
nur anden Intervallgren¬
zen
anzuschreiben,
umdie Plastizitätsbedingungen auch dazwischen
zuerfüllen. Somit erhalt
man:in Punkt 1: Pi > X Ni^-X
in Punkt 2: P2 > Q^ + x\
o 4
Nn>-&f-X±
in Punkt 3: P, > X + X-\
N9>-£j-X±
in Punkt 4: Na > 0 P4 >0
mit den Nebenbedingungen, daß die freien Variablen Pi, Nit P%y Na, Ps, iVs, Pa und Na^O sein müssen. Diese Bedingungen gehen
ausder
Definition
vonP und N hervor.
Für jeden Verlauf der plastischen Momente P und Ny der
zusammenmit
einem frei gewählten Einspannmoment X die Ungleichungen (3.22) be¬
friedigt, ist die Traglast des Systems nicht kleiner als die gegebene Be¬
lastung Q.
Gesucht ist das kleinstmögliche Gesamtvolumen der Armierung. Das
Gesamtvolumen der Armierung ist nach Gleichung (3.19)
V=±a |i/(+M + iW-f Pi + Pa)
+ | / (+ Ni + N9 + Pt + P8)
+ 2 i / (+ iVs + Na + Ps + ^4)} (3.23)
wobei V minimiert werden soll.
Mathematisch kann die Aufgabe folgendermaßen formuliert werden:
Gesucht ist Vmn,
sodaß die Ungleichungen (3.22), die linear in den freien Variablen Xy Pi, Pa, Ps, Pa» Ni, Nt, N3 und Na sind, erfüllt sind.
Eine solche Aufgabe ist wiederum ein lineares Programm.
Durch kleine Umformungen können die Bedingungen dieses Beispiels
auf die selbe Form wie die Funktionen des allgemeinen linearen Pro¬
gramms (3.5), (3.6) und (3.7) gebracht werden.
Die Ungleichungen (3.22) gehen in die Gleichungen (3.24) mit den Nebenbedingungen (3.25) über.
yi= -X+Pi
j2= +X + Ni
j8= -a{-x\ + Pi j4=+j2^+^f +Ni j>=-ü{-x\ + p*
J*=+£j + Xj+N9
J7
=+ Pa js
=-\- Na
(3.24)
Ji > 0, ja > 0, j3 > 0, j4 ^ 0, j5 ^ 0, je > 0, j7 ^ 0, j8 ^ 0
Pi>0,P2>0,P3>0,P4^0,A/1>0,iV2>0,A73>0,iV4>0 (3.25)
J£" ist eine freie Variable, die positiv oder negativ sein kann.
Die Objektfunktion Z hat folgendes Aussehen:
Z
=+ Ni
n-2Nz + Pi + 2P2 + 3iV3 + 3P3 + 2Na + 2P4 (3.26)
Z muß minimiert werden. Es spielt keine Rolle, ob die Funktion V oder ihr Vielfaches minimiert wird.
Durch Protokollieren der Funktionen (3.24) und (3.26) mit transponier¬
ter
Beschriftung erhält
mandas Schema des linearen Programms.
—
X
4—
P»
-N, -P.
-Nt
—
Pt -Na
—
Pi -Na
4
Jl = J» =
J»
=J«
= J« = J« = y. = J« = Z—4
4 3 —3
2 —20 0 0
— 1
0
00 0 0 0 0
—1
0 —
1 0
00 0
00
—1
0
0
— 10
00 0 0
—20 0
0
— 1 00 0
0 — 20 0
00
—1 0 0
0 — 30
00
00
—1
0 0 —30
0 0
00
0 —10
—20 0 0
00
0 0 — 1 —20 0
—1 1
—2 20
0 0Ein solches Programm kann nicht mehr graphisch gelöst werden. Der
zulässige Lösungsbereich, der im
erstenBeispiel ein Parallelogramm
war, ist
nunein neundimensionales Gebilde. Es gibt jedoch analytische
Methoden [10], [11] und insbesondere fertige Bibliotheksprogramme
für elektronische Rechenmaschinen,
umlineare Programme
zulösen.
Es wird hier verzichtet, auf die verschiedenen Methoden einzugehen.
Es sei
nurdie Lösung dieses Problems angegeben:
4
^24
Pi =0 Pi =0
p>=4£w
Pa =0
/ (3.27)
Ni
=0 JV3
=0 Na
=0
Daß P4 und Na den Wert 0 annehmen, hätte
man ausden Plastizitäts¬
bedingungen in Punkt 4 (3.22) und der Optimalbedingung, V muß ein
Minimum sein, direkt sagen können. Die letzten zwei Gleichungen
von(3.24) wären dann weggefallen.
Aus der Gleichung (3.27) erhält
manfür die totale Armierung
/* / 1 V
=Q
12 \rihof
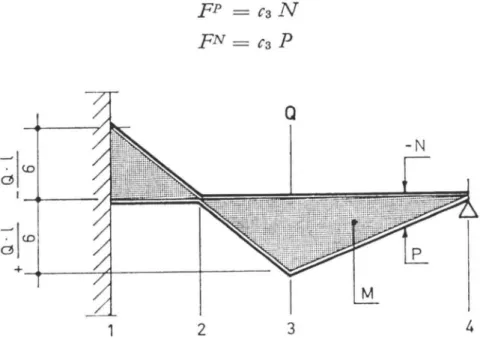
In Abb. 3.10 ist die Momentenfläche und der Verlauf der erforderUchen
plastischen Momente dargestellt.
Den Verlauf und die Größe der minimalen Armierung bekommt
mansofort
ausden Gleichungen (3.17). Sie lauten:
Fp
= c3N F" =c3P
G)
\ 1 Q
i
x^v
-Nr
(O
¦,
x
t-
/ >ijv -y^X^ 1
P/,
/ M
/
—12 3 4
Abb.3.10
Momentenfläche
undVerlauf
dererforderlichen plastischen
MomenteIm vorhergehenden Beispiel wird vorausgesetzt, daß P und N stück¬
weise linear sind (Abb. 3.8). Selbstverständlich können auch andere Vor¬
aussetzungen gemacht werden, z.B. die Armierung und demzufolge
P bzw. N soll über einem Bereich konstant verlaufen oder sie soll einen
gewissen Wert nicht überschreiten. Diese Grenze kann durch konstruk¬
tive Überlegungen oder durch die Bedingung, daß kein spröder Bruch
eintreten soll, also durch die Forderung fi ^ /umax gegeben sein. Manch¬
mal ist
es auskonstruktiven Gründen oder wegen Schwind- und Tempe¬
raturwirkungen erwünscht, eine Armierung einzulegen. Daß kein schlagartiger Bruch auftritt, kann durch Bedingungen, wie
ju^
//«,„,aus¬gedrückt werden. Alle diese zusätzlichen Forderungen können in Form
von
Ungleichungen angeschrieben werden. Das Suchen einer optimalen Armierung mit den oben erwähnten Bedingungen stellt immer noch ein
lineares Programm dar. Es unterscheidet sich generell nicht
vonden
vorher behandelten Fällen.
3.3 Zusammenfassung
Für Stabtragwerke sind durch Erfüllen der Plastizitätsbedingungen in ein¬
zelnen Punkten die Plastizitätsbedingungen über dem ganzen Tragwerk
erfüllt. Da die Schnittkräfte in einem Punkt lineare Funktionen der
un¬bekannten überzähligen Größen und der äußeren Belastung sind, erhält
man
für das Moment in einem Punkt eine lineare Funktion der unab¬
hängigen Variablen. Die plastischen Momente P/ und Ni sind bei der
Bestimmung der optimalen Armierung unabhängige Variable und bei der Bestimmung der Traglast Konstante. Durch Formulieren der Plasti¬
zitätsbedingungen Pi ^ Mi ^ —Ni in den einzelnen Punkten ergeben
sich lineare Ungleichungen in den unabhängigen Variablen. Diese Un¬
gleichungen mit der Forderung, daß eine lineare Funktion (Belastung
oder Armierungsvolumen) optimiert werden soll, bilden ein lineares
Programm.
Indem
mandas obige Vorgehen auf Platten ausdehnt, erhält
manfol¬
gende Forderungen:
Die Plastizitätsbedingungen müssen in den Schnittkräften und den pla¬
stischen Momenten linear sein (Kapitel 4).
Die Platte muß auf ein endlichfach statisch unbestimmtes Tragwerk
ver¬einfacht werden, damit die Schnittkräfte lineare Funktionen der über¬
zähligen Größen und der äußeren Belastung, d.h. der unabhängigen
Variablen sind (Kapitel 5.3).
Durch Erfüllen der Plastizitätsbedingungen in einzelnen Punkten müssen sie über dem ganzen Plattenbereich erfüllt werden (Kapitel 6).
Mit diesen Forderungen erhält
mandurch Formulieren der Plastizitäts¬
bedingungen in den einzelnen Punkten lineare Ungleichungen in den unabhängigen Variablen.
Diese Ungleichungen mit der Bedingung, daß eine lineare Funktion
-Belastung (Kapitel 7) oder Armierungsvolumen (Kapitel 8)
-optimiert
werden soll, ergeben wieder ein lineares Programm.
4. Plastizitätsbedingungen
4.1 Plastifizierung eines Plattenbereiches
Alle
neueingeführten Bezeichnungen sind
ausAbb. 4.1 und Abb. 4.16 ersichtlich.
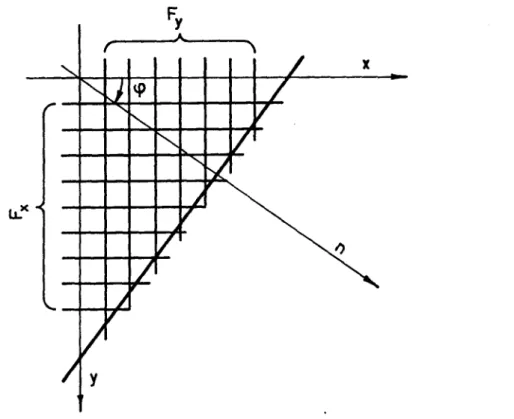
Die Plastifizierung eines Plattenbereiches ist durch folgende Merkmale gekennzeichnet:
Es existiert mindestens ein Schnitt, dessen Normale
nmit der x-Achse den Winkel tp einschließt und der
nurfließende obere oder
untereZug¬
eisen schneidet. In einem plastifizierten Bereich reißt die Platte bis
zurDruckzone auf und öffnet sich. Nur die Stahleinlagen und die Druck¬
zone
können
andiesen Stellen Kräfte übertragen. Die Zugkräfte der ein¬
zelnen Stahleinlagen wirken in deren ursprünglichen Achsrichtung.
Diese Annahme ist konservativ. Sie vernachlässigt die sogenannten Ver-
dübelungskräfte.
4.2 Orthogonale Armierung
Die beiden Armierungsrichtungen verlaufen in
x-und j-Richtung.
4.2.1 Plastizitätsbedingungen
Um die Plastizitätsbedingungen herzuleiten, wird die Platte in plastifi-
zierte (aufgerissene) und in elastische (nicht aufgerissene) Bereiche auf¬
geteilt.
Im elastischen Bereich ist für jeden beliebigen, senkrecht
zurPlatten¬
mittelebene geführten Schnitt das Biegemoment kleiner als das plastische
Fy
\
r >
/
XV ¦i 9
(
' N^
\
* -<
U."
\)
's,
¦
y
1
Abb. 4.1 Bezeichnungen bei orthogonaler Armierung in
x- undjf-Richtung
Moment. Demzufolge kann die Platte nicht auf-, sondern höchstens
an¬reißen. Dieser nicht aufgerissene Bereich ist fähig, durch die Verzahnung
der Betonkörner Schubspannungen und demzufolge auch Drillungs¬
momente zu
übertragen.
Daraus ergibt sich, daß in einem beliebig geführten Schnitt mit der
Normalen
n(Abb. 4.1) das Biegemoment
mnkleiner als das positive plastische Moment P„ und größer als das negative plastische Moment
-Akist.
Ein plastifizierter Bereich erstreckt sich entlang eines Risses. Seine Breite ist normalerweise beschränkt. Sie ist sicher kleiner als der Rißabstand.
Fließt in einem aufgerissenen Bereich z.B. die
untereZugarmierung,
sobeträgt das entsprechende positive plastische Moment für einen Schnitt parallel der j-Achse
P*
=*/ K < h (4.1.1)
wobei F* die Fläche der
unterenArmierung in der x-Richtung und
t£ h die Distanz zwischen der Zug- und der Druckresultierenden dar¬
stellen (Abb. 3.7).
In diesem Schnitt ist die Zugkomponente der fließenden Armierung in
der j-Richtung null und daher auch das zugehörige plastische Drillungs¬
moment.
P*,
=0 (4.1.2)
Daraus folgt, daß in diesem Bereich die Momente in der
x-und j-
Richtung Hauptmomente sind.
Analog erhält
manfür einen Schnitt parallel der x-Achse das entspre¬
chende positive plastische Moment
Py
=ofF* rjfh (4.1.3)
und das plastische Drillungsmoment
Pyx
=0 (4.1.4)
Für das Fließen der oberen Armierung wird
K
=of F» rjN h (4.1.5)
NXJ
=0 (4.1.6)
beziehungsweise
Ny
=Of Pf rff h (4.1.7)
Ny*
=0 (4.1.8)
Die maximalen und minimalen Biegemomente sowie die zugehörigen Drillungsmomente im plastifizierten Bereich, genannt plastische Mo¬
mente, erhält
manfür einen beliebigen Schnitt tp (Abb. 4.1) nach den
Transformationsformeln [12].
Die Momente in
x-und j-Richtung muß
mandurch die entsprechenden plastischen Momente
ersetzen.Die plastischen Drillungsmomente sind gleich Null.
P„
=Px cosny + Py sin2 tp
P„v
=|(P, -Px)sin29>
(-N„)
=(-Nx) cos2 cp + ( -Ny) sin2 tp
N„v
=± {(-Ny)
-(-Nx)) sin2tp
(4.2)
In der Druckzone des plastifizierten Bereiches existiert ein Spannungs¬
zustand, bei dem die Spannungen in
x-und j-Richtung ebenfalls Hauptspannungen sind. Die Drillungsmomente in den Schnitten parallel
der
x-und j-Achsen sind null, und daher sind auch die horizontalen
Schubspannungen %xy null. Bei der Berechnung der plastischen Momente
in
x-und j-Richtung wird nach Abb. 3.7 angenommen, daß die
größte Betondruckspannung gleich der Prismendruckfestigkeit ß ist.
Die beiden Hauptspannungen
axund o> sind demnach höchstens gleich ß. Das Entstehen eines Risses verhindert, daß die Normalspannungen
kleiner als null werden. Ein solcher Spannungszustand verletzt die Bruchhypothese
vonMohr nicht und ist demnach auch ein stabiler
Spannungszustand.
Beim Betrachten des ganzen Plattenbereiches ist in den elastischen Be¬
reichen für alle Richtungen
-Nn <mn<Pn
mn
ist das Biegemoment für den Schnitt in Richtung tp.
Erreicht
mn —P» oder
= —Nn und m„9
=PH<p bzw.
=N«? wird der
Querschnitt plastifiziert.
In diesem Bereich besteht ein zulässiger Gleichgewichtszustand, der
weder die Plastizitätsbedingungen des Armierungsstahles
oX± a/ noch die Bruchhypothesen
vonMohr für den Beton verletzt. Der Gleich¬
gewichtszustand eines plastifizierten und des anschließenden elastischen Bereiches ist für den Fall, daß die
unterenStahleinlagen fließen, in
Abb. 4.2 dargestellt. Beim Fließen der oberen Stahleinlagen werden die
P durch N
ersetzt.Abb. 4.2
Gleichgewichtszustand
zwischen elastischem undplastifiziertem
Bereichbei
orthogonaler Armierung
in x- undj-Richtung
Für die vollständigen Plastizitätsbedingungen ist also
zufordern, daß
für alle Richtungen <p gilt:
-N„ <
m„ <P„ (4.3.1)
und für
mn =—Nn
: mHw =Nnp
(4.3.2)
m» = Jr» :
mnrp
=Jrntp
Nun werden die Bedingungen aufgestellt,
unterwelchen —Nn <
/*«< P*
ist und nachträglich gezeigt, daß die erhaltenen Bedingungen auch die folgenden Forderungen erfüllen. Bei
mn =P* ist auch mH<p
=P»?
und bei
mn =—Nn auch mn<p
=Nuq>.
Die plastischen Momente für die Richtung tp sind nach Gleichungen (4.2)
P„
=Px cos2 tp
nrPy sin2 tp
Pnq>
=|- (P,
-Px) sin 2 9?
( -iV„)
=( -Nx) cos2 y + ( -Ny) sin2 ?
(4'2)
Nmp =±((-Ny)-(-Nx))sin2tp
Die Biegemomente
;»*und die Drillungsmomente mnq> erhält
manals Funktion
vonmx, m3 und mx, nach den Transformationsformeln [12]:
mn = mx
cos2 9p + /», sin2 9? -|- mxy sin 2 9?
mn<p
= —{my
—n*x) sin 2 9p -f mxy
cos2 9?
Eingesetzt in die Bedingung (4.3.1) —Nn <
m„< P» erhält
man(4.4)
(
—Ak) cos2 97 + (
—Ny) sin2 9? <
mxcos2 9? + my sin2 9? + % sin 2 9?
< Px cos2 9? + Py sin2 9? (4.5)
Nx, Ny, Px und P^ sind positive Werte.
Die obige Ungleichung wird
nunin zwei einfache Ungleichungen auf¬
geteilt, wobei die
erstedurch die positiven plastischen Momente (untere
Armierung) und die zweite durch die negativen plastischen Momente
(obere Armierung) begrenzt wird.
Px cos2 tp + Py sin2 tp^m* cos2 9? + my sin2 tp + z*xy sin 2 9? (4.5.1) (—Nx) cos2 9? -f ( -Ny) sin2 99 <
mxcos2 97 + «ty sin2 tp + «fxy sin 2 9? (4.5.2)
Als
erstessoll die Ungleichung (4.5.1) untersucht werden. Nach kurzer
Umformung erhält
man:(Px
—mx) cos2 9? + (Py
—my) sin2 tp > mx, sin 2 9?
=2 /*xj> sin 9?
cos9?
(4.6)
Für den Fall A, bei dem sin 2 tp ^ 0 und demnach auch tg tp > 0 ist, ist
der Gültigkeitsbereich
vontp in Abb. 4.3 dargestellt, wobei tp im Uhr¬
zeigersinn abgetragen ist.
Abb. 4.3 Gültigkeitsbereich
vonF (cp) im Fall <cA»
Mit diesen Voraussetzungen kann die Beziehung (4.6) weiter in die Un¬
gleichung (4.7) umgeformt werden
(Px-mx) 1 (P, + *,)
,^ ,,_
H
tg<p>m*j (4.7)=
Äx und
— =Ry erhält
man2 tg<p
Mit den Abkürzungen (A
¦—mx)
2
Px 1
tg<p X Pytg<p> mxy (4.8)
Für den Fall B, bei dem sin 2 tp < 0 und demnach auch tg tp < 0 ist, wird der Gültigkeitsbereich
vontp in Abb. 4.4 dargestellt, wobei tp im Uhr¬
zeigersinn abzutragen ist.
Abb. 4.4 Gültigkeitsbereich
vonF (cp) im Fall «B»
Unter diesen Voraussetzungen und den obigen Abkürzungen erhält
manPx
tgy + Rytgtp ^mxy (4.9)
Diskussion der Funktion F (cp):
Durch Ableiten der Funktion
ergibt sich
F(tp)
=Rx + Rytgtp
8F(<p) -Rx
dtp +
Ry
sin2 cp cos2 9?
(4.10)
(4.11)
Durch Nullsetzen der 1. Ableitung erhält
manden Ort der horizontalen
Tangente
—Px R»
+
— =0
sin2 cp cos2 cp
(4.12.1)
oder
Ry
=
tg295 (4.12.2)
und indem
manwieder einsetzt Px
— mxPy
—my
=
tg29? (4.13)
Für den Fall A (tg tp > 0) gibt
esfolgende Möglichkeiten für die Vor¬
zeichen
vonPx und Ry\
») Px^O
Rj >0
Für diese Bedingung ist der qualitative Verlauf der Funktion F (tp) in
Abb. 4.5 dargestellt. Diese Funktion besitzt zwei Minima. Es ist sofort
ersichtlich, daß durch Erfüllen der Ungleichung (4.8)
anden Stellen der Minima die Ungleichung für jedes tp erfüllt ist.
F«p)
TC TC
2
TC 2
<P
TC
b)
Abb. 4.5 Qualitativer Verlauf
vonF (<p)
imFall
«A»und Rx
~ZL0, Ry >: 0
Px<0 Ry >0
Abb. 4.6 zeigt den qualitativen Verlauf der Funktion F (tp). Diese
Funktion besitzt kein Minimum; sie geht
vonminus Unendlich nach
plus Unendlich. Die Ungleichung (4.8) kann daher nicht für jedes tp erfüllt werden. Die Möglichkeit Rx < 0 und Ry > 0 ist nicht zulässig.
Tt TC
2
TC
Abb. 4.6 Qualitativer Verlauf
vonF (<p) im Fall «A» und Rx
—0,Rj Eür 0
c) Px>0
Ry <0
Für diese Bedingung ist der qualitative Verlauf der Funktion F (tp) in
Abb. 4.7 dargestellt. Die Funktion besitzt kein Minimum. Sie geht
von<P
TC TC
2
TC
Abb. 4.7 Qualitativer Verlauf
vonF (cp) für Fall «A» und Rx
>0, Ry
<0
plus Unendlich nach minus Unendlich. Die Ungleichung (4.8) kann
nicht erfüllt werden für jedes tp. Die Möglichkeit Px > 0 und Ry < 0 ist nicht zulässig.
d) Px<0
Der qualitative Verlauf der Funktion F (tp) ist in Abb. (4.8) dargestellt.
Diese Funktion besitzt zwei Maxima, und
esist sofort ersichtlich, daß
die Ungleichung (4.8) nicht für jedes 99 erfüllt werden kann.
"W
TC TC
2
-<P
TC