Statik starrer Körper
Gleichgewichtsbedingungen (GGB) 0
0 0
ix iy i
F F M
=
=
=
∑ ∑
∑
Lagerreaktionen
à statische und kinematische Bestimmtheit
3 0
a+ − ⋅ =z n
mit a = Summe der Auflagerbindungen z = Summe der Zwischenbindungen
mit zi = ⋅2 (mi−1)
mi =Anzahl der SK am Gelenk i n = Anzahl der starren Körper
Schnittgrößen
²
²
dQ dM d M
q Q q
dx = − dx = dx = − Haftung und Reibung
R≤µ0⋅N mit µ0 =tanα0 =Haftreibungskoeffizient Schwerpunkt
Fläche S S
xdA ydA
x y
dA dA
=
∫
=∫
∫ ∫
bzw. bei bekannten Schwerpunkten von Teilflächen
i i i i
S S
i i
x A y A
x y
A A
⋅ ⋅
=
∑
=∑
∑ ∑
Linie S S
xds yds
x y
ds ds
=
∫
=∫
∫ ∫
bzw.
i i i i
S S
i i
x l y l
x y
l l
⋅ ⋅
=
∑
=∑
∑ ∑
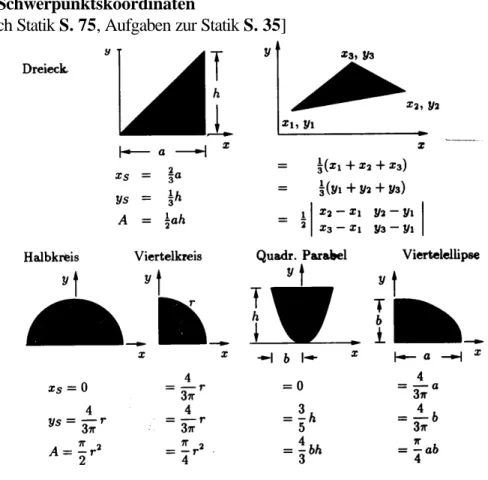
Tabelle von Schwerpunktskoordinaten
[vgl. auch Buch Statik S. 75, Aufgaben zur Statik S. 35]
Flächenträgheitsmomente
²
²
²
y A z
A
yz zy
A
P y z
A
I z dA I y dA
I I z ydA
I I I r dA
=
=
= = − ⋅
= + =
∫
∫
∫
∫
Satz von Steiner
²
²
y y S
z z S
yz yz S S
I I z A
I I y A
I I z y A
= + ⋅
= + ⋅
= − ⋅ ⋅
mit zS, yS = Abstand zur jeweiligen Schwerachse
Transformationsformeln
cos(2 ) sin(2 )
2 2
cos(2 ) sin(2 )
2 2
sin(2 ) cos(2 )
2
y z y z
yz
y z y z
yz
y z
yz
I I I I
I I
I I I I
I I
I I
I I
η
ξ
ηξ
α α
α α
α α
+ −
= + ⋅ + ⋅
+ −
= − ⋅ − ⋅
= − − ⋅ + ⋅
Hauptträgheitsmomente
2 2
1,2 2 2
y z y z
yz
I I I I
I + − I
= ± +
Hauptachsenrichtung tan(2 H) 2 yz
y z
I I I
α ⋅
= −
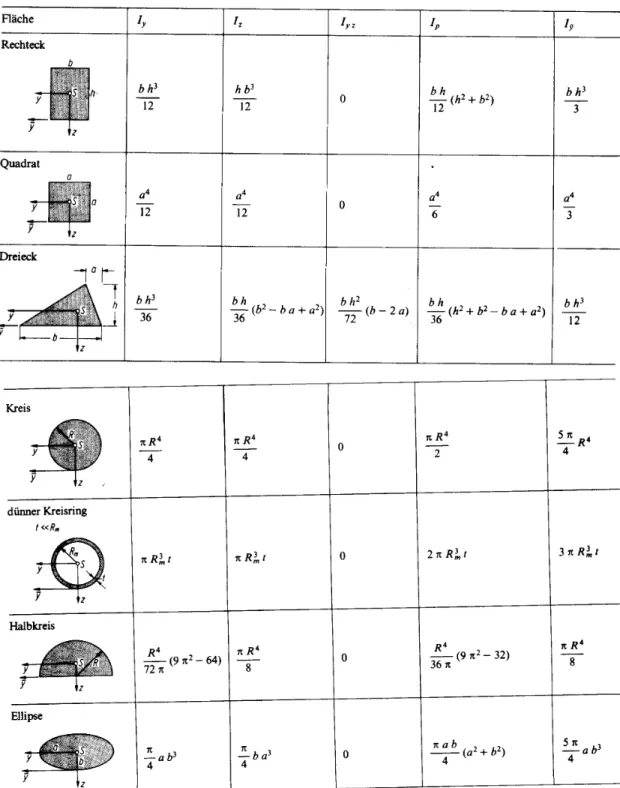
Tabelle von Flächenträgheitsmomenten
[vgl. auch Statik-Aufgaben S. 193, Elastostatik S. 84]
Elastostatik
Spannungen
Normalspannung: dN
σ = dA
Schubspannung: dQ
τ = dA
Schnittgrößen-Spannungsbeziehungen (SSB)
A
A
A
N dA
Q dA
M z dA
σ τ
σ
=
=
= ⋅
∫
∫
∫
Stab
Spannung ( )
( ) ( )
x N x σ = A x
Dehnung l du
l dx ε= ∆ = Verlängerung
0l ( ) l ε x dx
∆ =
∫
Hooke σ = ⋅E ε à l F l
E A
∆ = ⋅
⋅ Wärmedehnung εth = ⋅ ∆α T à εges =εel+εth Wärmespannung σth = − ⋅ ⋅ ∆α E T à σges =σel+σth
Ebener Spannungszustand
es gilt: τxy =τyx, τx y ⊥τyx
à bei Schnitt: GGB anwenden, wobei Spannungen jeweils mit zugehöriger Fläche zu multiplizieren (Schnittfläche = dA, Seitenflächen jeweils sin/cos dA)
Transformationsformeln
cos(2 ) sin(2 )
2 2
cos(2 ) sin(2 )
2 2
sin(2 ) cos(2 )
2
x y x y
xy
x y x y
xy
x y
xy ξ
η
ξη
σ σ σ σ
σ α τ α
σ σ σ σ
σ α τ α
τ σ σ α τ α
+ −
= + ⋅ + ⋅
+ −
= − ⋅ − ⋅
= − − ⋅ + ⋅
Hauptspannungen (extremale Normalspannungen)
2 2
1,2 2 2
x y x y
xy
σ σ σ σ
σ = + ± − +τ
Hauptspannungsrichtungen
* 1
tan(2 ) 2 xy
x y
ϕ τ
σ σ
= ⋅
− Richtungen stehen senkrecht à ϕ*2 =ϕ1* ±π2 maximale Schubspannungen
2 2
max 2
x y
xy
σ σ τ = − +τ
à ϕ**=ϕ*±π4
Mohrscher Spannungskreis
à siehe auch Aufgaben zur Elastostatik, S. 11
Mittelpunkt σm = 12
(
σx+σy)
τ =0Radius
2 2
2
x y
r σ σ xy
− τ
= +
Verzerrungen ( , ) ( , )
( , ) ( , )
x
y
xy
u x y x v x y
y
u x y v x y
y x
ε ε γ
=∂
∂ ∂
= ∂
∂ ∂
= +
∂ ∂
Biegung
Normalspannung ( ) M
z z
σ = I ⋅
max
M
σ = W mit
max
W I
= z
Biegelinie ( ) M x( )
w x′′ = − E J
⋅ (linearisierte DGL der Biegelinie) ( )x w x( )
ϕ = − ′
à Integrationskonstanten aus Randbedingungen
à bei mehreren Bereichen Übergangsbedingungen beachten (keine Sprünge, gleich Biegung)
Überlagerungsmethode à wmax à Myosotis-Formeln
max max
, ²
3 2
F l F l
w E I⋅ ϕ E I⋅
= =
⋅ ⋅ ⋅ ⋅
(auf alle Anteile achten! à vgl. Vorlesungsmitschrift S. 91)
Energiemethoden
Elastische Energie der Bauteile
à Zug/Druck 12
0
²( )
l Z
U N x dx
= E A
∫
⋅ à reine Biegung 120
²( )
l B
M x
U dx
= E I
∫
⋅ à Schub (Querkraft) 120
²( )
l Q
U Q x dx
E A κ
= ⋅
∫
⋅ mit Formfaktor6 5 10
9
Rechteck Kreis κ
κ
=
= à Torsion
2 1 2 0
( )
l T
T
P
M x
U dx
= G I
∫
⋅Arbeitssatz W =U
Castigliano
( , ) ( , )
i i , i i
i i
i i
U F M U F M
u = ∂ F ϕ =∂ M
∂ ∂ partielle Ableitung
à Achtung bei Koordiante ϕ à Integral über r dϕ⋅ , nicht dϕ !!!!
mit Hilfskraft
à an Arbeitsstelle einführen, weiterrechnen wie mit eingeprägter Kraft à nach partieller Ableitung in der weiteren Rechung zu "0" setzen statisch unbestimmte Probleme
à Lagerreaktion durch Hilfskraft ersetzen à Verschiebung zu "0" setzen (da festes Lager) Satz von Meambrea
à statisch unbestimmte Xi stellen sie genau so ein, dass die gesamte im System gespeicherte Energie minimal wird
!
0
i
U
∂ =X
∂ (in U =U F M X( ,i i, i)keine Lagerkräfte !!!) Torsion
Kreisquerschnitt
T P
M = ⋅ ⋅G ϑ I mit P ²
A
I =
∫
r dA Vollkreis: IP = ⋅π2 r4Schubspannung x T
P
M r
ϕ I
τ = ⋅ mit T x
A
M =
∫
r⋅τ ϕdA Torsionsmoment Verdrehungl
ϑ =∆ϕ T
P
M l ϕ ϕ G I⋅
∆ = =
⋅ (vgl. FLEA) Kreisringquerschnitt
4 4
2( )
P a i
I =π r −r
2
T x
m
M
ϕ A h τ =
⋅ ⋅ Am = umschlossene Fläche
h = Dicke Schubfluß
t= ⋅h τxϕ
2
T m
t M
= A
⋅ "1. Bredtsche Formel"
Verformung bei dünnwandigen, geschlossenen Profilen
4 2
T T
m T
M ds M
A G h G I
ϑ = =
⋅ ⋅
Ñ ∫
⋅ "2. Bredtsche Formel"mit
4 m2 T
I A
ds h
= ⋅
Ñ ∫
Torsionsträgheitsmomentà bei Zweigstegen über einzelne Profile Summieren dünnwandige offene Profile
3 3
1 1
3 3
1
.
n
T T i i
i
I l h bzw I l h
=
= ⋅ ⋅ =
∑
⋅ ⋅Verdrillung T
T
M ϑ =G I
⋅
Schubspannung i,max T i
T
M h τ = I ⋅
Querschnittskennwerte bei Torsion [vgl. auch Elastostatik S. 108]
Kinematik und Kinetik
Bahn rr r=r t( )
Geschwindigkeit
lim0 t
r dr
v r
t dt
∆ →
= ∆ = =
∆
r r
r r& "Momentangeschwindigkeit"
vrimmer tangentiell zur Bahn à Tangenteneinheitsvektor t dr er = drr r à vr r r= ⋅ = ⋅v et v ert Beschleunigung a dv v r
= dtr = = r r r& &&
Kinematik des Massenpunkts kartesische Koordinaten
x y z
x y z
x y z
r x e y e z e v x e y e z e a x e y e z e
= ⋅ + ⋅ + ⋅
= ⋅ + ⋅ + ⋅
= ⋅ + ⋅ + ⋅
r r r
r r r
& & &
r r r
&& && &&
2 2 2
2 2 2
v x y z ds dt
a x y z s
= + + =
= + + ≠
r & & &
r && && && &&
Polarkoordinaten
( ²) ( 2 )
r z
r z
r z
r r e z e
v r e r e z e
a r r e r r e z e
ϕ
ϕ
ϕ
ϕ ϕ ϕ
= ⋅ + ⋅
= ⋅ + ⋅ + ⋅
= − ⋅ + + ⋅ + ⋅
r r
r r r
& & &
r r r
&& & && & & &&
mit (r&&−rϕ&²)⋅err Radialbeschleunigung (rϕ&&+2r& &ϕ)⋅erϕ Querbeschleunigung
z e⋅rz
&& Axialbeschleunigung
ebene Bewegung à z = 0 ( )
( )
( ) ( ²) ( 2 )
r r
r
r t r e
v t r e r e
a t r r e r r e
ϕ
ϕ
ϕ
ϕ ϕ ϕ
= ⋅
= ⋅ + ⋅ ⋅
= − ⋅ ⋅ + ⋅ + ⋅ ⋅ ⋅
r r
r & r & r
r && & r && & & r
Kreisbewegung à r = const.
2
( ) ( ) ( )
r
r
r t r e v t r e
a t r e r e
ϕ
ϕ
ϕ
ϕ ϕ
= ⋅
= ⋅
= − ⋅ + ⋅
r r
r & r
r & r && r
mit Winkelgeschwindigkeit ω ϕ= &
à ( ) 2
( ) r
v t r e
a t r e r e
ϕ
ϕ
ω
ω ω
= ⋅
= − ⋅ + ⋅
r r
r r & r
wobei at = ⋅r ω& "Bahnbeschleunigung"
² ²
n
a v r
r ω
= = ⋅ "Zentripetalbeschleunigung"
ebene Bewegung in Polarkoordinaten Radialgeschwindigkeit vr =r&
Zirkulargeschwindigkeit vϕ = ⋅r ω Radialbeschleunigung ar = − ⋅r&& r ω² Zirkularbeschleunigung aϕ = ⋅ + ⋅ ⋅r ω& 2 r& ω
"Zentralbewegung" à aϕ =0
à Flächensatz aϕ =rω&+2r&ω=1r( ²r ⋅ω)&= ⇒ ⋅ =0 r² ω konst. (Ortsvektor überstreicht in gleichen Zeiten gleiche Flächen) Kinetik des Massenpunkts
Bewegungsgesetz
( )
d m v
p F
dt⋅ = =& à mit F =
∑
Fi, p = ⋅m v(Impuls)F m v m a r = ⋅ = ⋅ r & r
(m = konst.) à "Kinematische Grundgleichungen" (KGG)x y
m x F
m y F
⋅ =
⋅ =
∑ ∑
&&
&&
Impulssatz (Impuls: p oder J)
0
0 t
m v m v⋅ − ⋅ =
∫
t Fdt ⇒ = ⋅ =p m v konst bei Abwesenheit von Kräften Drehimpulssatz (Momentensatz)(0)
dL (0)
dt =M L(0) = ×r p Drehimpuls (Drall) bzgl. Punkt 0 M(0) = ×r F Moment bzgl. Punkt 0
Kinematik der ebenen Bewegung starrer Körper
à SK-Bedingung: "Geschwindigkeitsvektoren von je 2 Punkten haben stets gleiche Komponenten in Richtung ihrer Verbindungs-Geraden."
Grundformel (Euler-Gleichung)
p AP
AP AP
p AP
v v r
r r
v v r
ω ω
= +
→ = ×
⇒ = + ×
r r r&
r& r r
r r r r
Winkelgeschwindigkeitsvektor ist unabhängig vom Bezugspunkt Beschleunigung
P A AP ² AP
ar =ar + ×ωr r& r −ω ⋅rr
"ebene Drehung" à Richtung von ω = konst à ⊥ − −x y Ebene ⇒ = ⋅ω ωr erz
( )
( ) ²
P A z AP
P A z AP AP
v v e r
a a e r r
ω
ω ω
= + ⋅ ×
= + ⋅ × − ⋅
r r r r
r r & r r r
Momentenpol G
à vG =0 (à Momentanbewegung = Rotation mit ω um Pol)
²
A G
r r ω v ω
= + r r×
r r
im Komponenten
A
G A
A
G A
x x y y y x
ω ω
= −
= −
&
&
à momentane Geschwindigkeitsverteilung so, als ob Drehpol G fester Punkt um den Scheibe rotiert
à vP = ⋅ω rGP
Impulssatz in integraler Form
2
1
2 1 2 1
( ) ( )
t
F t
Sr =
∫
F t dtr = rp − pr = ⋅m vr r−v mit SrF = Stoßkraft, Schub Drehimpulssatz (für Mr(0) = ⇒0Drallerhaltungssatz) Lr(0) = × = × ⋅rr r rp r m vr
à Zeitintegration
2
( 0 ) ( 0 )
1
(0) 2 1
t M
t
Sr =
∫
Mr dt=Lr −Lr "integrale Form"mit SrM =
Stoßmoment
Arbeitssatz
(1. Integration der KGG über den Weg) dA=dT "differentielle Form"
mit T = 12m v⋅ ² = kinetische Energie des Massenpunkts kinetische Energie
1 2 1
2 2 ²
k S S
E = m v⋅ + Θ ⋅ω reine Translation Ek = 12m v⋅ 2S reine Rotation Ek = Θ ⋅12 S ω² Übersicht
Einzelmasse (MP) Massenpunktsystem (MPS) starrer Körper (SK) Schwerpunkt
rr rS =r i i
S
r m r m
=
∑
⋅rr m
S
rdm rr =
∫
mr Impulspr = ⋅m vr pr = ⋅m vrS
(1. Schwerpunktssatz)
pr= ⋅m vrS
i S
Rr=
∑
F = ⋅m ar ImpulssatzFr = ⋅m ar für
0 0
Fr = ⇒ = ⇒ =pr& pr konst
i S
F = ⋅m a
∑
r rfür
i 0
Rr=
∑
Fr = ⇒ =pr konst analog DrallsatzLr(0) = × = × ⋅rr r rp r m vr Lr(0) = × + Θ ⋅rr rS p S ωr
"starres MPS"
(0) S S
M r p ω
⇒ r = × + Θ ⋅r r& r
Lr(0) =
∫
rr r×vdm Euler: vr r= + ×vS ωr rr à Lr(0) = × + Θ ⋅rr rS p S ωr(0) ( )s S
M r p ω
⇒ r =r × + Θ ⋅r& r
nur angewandt auf raumfesten Bezugspunkt oder Schwerpunkt !
kinetische Energie
1
2 ²
T = m v⋅
1
2 ² S ²
T = m v⋅ + Θ ⋅ω mit Θ =S
∑
rri2⋅mi1
2 ² S ²
T = m v⋅ + Θ ⋅ω mit Θ =S
∫
r dmr2Stoßvorgänge
à Impulserhaltung m v1⋅ + ⋅ = ⋅ + ⋅1 m v2 2 m v1 1* m v2 *2 à Energieerhaltung (Π +T)vor = Π +( T)nach
Stoßhypothese (Newton)
* *
2 1 1 2
(v −v )= ⋅k (v−v )
mit "Stoßzahl k"
1
k = à vollelastischer Stoß 0
k= à vollplastischer Stoß 0< <k 1 à teilplastischer Stoß Energieverlust
1
2 2
2 2 * *
1 1 1 1
1 2 2 1 1 2 2
2 2 2 2
( ) ( )
V vor nach
T =T −T = m v + m v − m v + m v
à 1 2 1 2
1 2
1 ²
( )²
V 2
k m m
T v v
m m
− ⋅
= − ⋅
+