Numerik f¨ ur Ingenieure
Steffen B¨ orm
Stand 17. April 2020
Alle Rechte beim Autor.
Inhaltsverzeichnis
1 Einleitung 5
1.1 Beispiel: Sortieren . . . . 6
1.2 Beispiel: Schnelle Fourier-Transformation . . . . 11
2 Lineare Gleichungssysteme 15
2.1 Beispiel: Differentialgleichung . . . . 15
2.2 Allgemeine Aufgabenstellung . . . . 17
2.3 Dreiecksmatrizen . . . . 17
2.4 LR-Zerlegung . . . . 20
2.5 Fehlerverst¨ arkung . . . . 27
2.6 QR-Zerlegung . . . . 33
2.7 Ausgleichsprobleme . . . . 42
3 Nichtlineare Gleichungssysteme 47
3.1 Beispiel: Lagrange-Punkte im Gravitationsfeld . . . . 47
3.2 Bisektionsverfahren . . . . 49
3.3 Allgemeine Fixpunktiterationen . . . . 51
3.4 Newton-Verfahren . . . . 56
4 Eigenwertprobleme 63
4.1 Beispiel: Schwingende Saite . . . . 63
4.2 Vektoriteration . . . . 64
4.3 Inverse Iteration . . . . 69
4.4 Orthogonale Iteration . . . . 73
4.5 QR-Iteration . . . . 79
4.6 Praktische QR-Iteration
∗. . . . 82
5 Approximation von Funktionen 85
5.1 Beispiel: Computergrafik . . . . 85
5.2 Polynominterpolation . . . . 86
5.3 Auswertung per Neville-Aitken-Verfahren . . . . 87
5.4 Auswertung mit Newtons dividierten Differenzen . . . . 89
5.5 Approximation von Funktionen . . . . 93
6 Numerische Integration 97
6.1 Beispiel: Wahrscheinlichkeiten . . . . 97
6.2 Quadraturformeln . . . . 98
6.3 Fehleranalyse . . . . 103
7 Gew¨ohnliche Differentialgleichungen 111
7.1 Beispiel: Numerische Simulationen . . . . 111
7.2 Integralgleichung . . . . 112
7.3 Zeitschrittverfahren . . . . 114
7.4 Verfeinerungen und Variationen
∗. . . . 119
Literaturverzeichnis 125
1 Einleitung
Viele Gesetzm¨ aßigkeiten in den Natur-, Ingenieur- und auch Wirtschaftswissenschaften werden mit Hilfe mathematischer Gleichungen beschrieben: Die auf Newton zur¨ uckge- henden Axiome der klassischen Mechanik werden in der Regel mit Hilfe von Differen- tialgleichungen ausgedr¨ uckt, das Verhalten einfacher Schaltungen mit Hilfe der Kirch- hoff’schen Gesetze, w¨ ahrend bei der Modellierung des zu erwartenden Gewinns eines Aktienpakets Integrale zum Einsatz kommen.
In einfachen F¨ allen lassen sich diese Gleichungen per Hand l¨ osen, in der Praxis ist es jedoch wesentlich h¨ aufiger nicht m¨ oglich: Entweder l¨ asst sich die L¨ osung nicht in der
¨
ublichen Weise in geschlossener Form darstellen, oder es sind schlicht zu viele Variablen im Spiel.
Die numerische Mathematik (oder kurz Numerik ) besch¨ aftigt sich mit der Frage, wie derartige Probleme m¨ oglichst schnell gel¨ ost werden k¨ onnen. Dabei ist die Wahl des rich- tigen Verfahrens von entscheidender Bedeutung: Ein lineares Gleichungssystem mit der Cramer’schen Regel aufzul¨ osen ist zwar theoretisch machbar, f¨ uhrt in der Praxis aber schon bei relativ kleinen Problemen zu einem inakzeptablen Zeitaufwand. Das Gauß’sche Eliminationsverfahren dagegen ist wesentlich effizienter und kann auf modernen Com- putern auch noch Systeme mit 10 000 Unbekannten in vertretbarer Zeit behandeln.
Ein weiterer wichtiger Gesichtspunkt ist die Genauigkeit der Berechnung: Bei Be- rechnungen auf Grundlage von Messdaten treten immer auch Messfehler auf, die das Ergebnis der Berechnung verf¨ alschen. Bei der Modellierung eines physikalischen Prozes- ses wird man in der Regel von vereinfachenden Annahmen ausgehen und so einen Mo- dellfehler einf¨ uhren, der ebenfalls das Ergebnis ver¨ andert. Schließlich kommen bei der Durchf¨ uhrung der Berechnung auf einem Computer auch noch Rundungsfehler hinzu.
Um die Qualit¨ at des Ergebnisses beurteilen zu k¨ onnen, m¨ ussen wir also auch untersu- chen, welche Genauigkeit wir ¨ uberhaupt erwarten d¨ urfen.
Viele numerische Verfahren bieten die M¨ oglichkeit, einen Kompromiss zwischen Ge- schwindigkeit und Genauigkeit einzugehen: Falls wir wissen, dass unsere Messfehler oh- nehin nur eine Genauigkeit von 3% des Ergebnisses zulassen, ist es unkritisch, auch die Berechnung so weit zu vereinfachen, dass sie einen zus¨ atzlichen Fehler von h¨ ochstens 1%
hinzuf¨ ugt, daf¨ ur aber wesentlich schneller ausgef¨ uhrt werden kann. Deshalb werden viele der im Rahmen dieser Vorlesung vorgestellten Verfahren N¨ aherungsverfahren sein, bei denen wir sowohl Zeitbedarf als auch Genauigkeit analysieren.
In diesem Kapitel werden wir zun¨ achst einige einfache Algorithmen kennen lernen,
mit deren Hilfe sich Aufgaben, die auf den ersten Blick sehr rechenintensiv sind, sehr
elegant und schnell l¨ osen lassen.
1.1 Beispiel: Sortieren
Als Beispiel daf¨ ur, welchen Einfluss die Wahl des Algorithmus auf den Aufwand f¨ ur das L¨ osen eines Problems hat, untersuchen wir die einfache Aufgabe, n Zahlen a
1, a
2, . . . , a
n∈
Rzu sortieren. Es soll also ein sortierter Vektor
b
a =
ˆ a
1ˆ a
2.. . ˆ a
n
, ˆ a
1≤ ˆ a
2≤ . . . ≤ ˆ a
nkonstruiert werden, der dieselben Eintr¨ age wie der urspr¨ ungliche Vektor enth¨ alt, f¨ ur den also
{a
1, . . . , a
n} = {ˆ a
1, . . . , a ˆ
n}
gilt. Ein einfacher Algorithmus f¨ ur die Behandlung dieser Aufgabe ist das Sortieren durch Einf¨ ugen: Wir gehen davon aus, dass die ersten k Eintr¨ age bereits sortiert sind, dass also a
1≤ a
2≤ . . . ≤ a
kgilt. Nun m¨ ochten wir a
k+1in diesem Teilvektor an die richtige Stelle bringen. Dazu vergleichen wir a
k+1zun¨ achst mit dessen gr¨ oßtem Element a
k. Falls a
k≤ a
k+1gilt, sind wir fertig. Ansonsten muss a
k+1vor a
keingef¨ ugt werden.
Also pr¨ ufen wir, ob a
k−1≤ a
k+1gilt. Falls ja, geh¨ ort a
k+1zwischen a
k−1und a
k. Falls nein, muss a
k+1auch vor a
k−1eingef¨ ugt werden. Im ung¨ unstigsten Fall, n¨ amlich wenn a
k+1< a
1gilt, ben¨ otigen wir k Vergleiche, um die richtige Position f¨ ur a
k+1zu finden.
Auf dieser Grundidee k¨ onnen wir nun aufbauen: Wir beginnen mit dem Teilvektor a
1, der trivial
” sortiert“ ist. Dann f¨ ugen wir nach und nach a
2, a
3, . . . , a
nmit der beschrie- benen Technik ein. Um den Arbeitsaufwand m¨ oglichst gering zu halten, speichern wir das gerade einzuf¨ ugende Element in einer Hilfsvariablen y und schaffen Platz im bereits sortierten Vektor, indem wir dessen Eintr¨ age nach rechts verschieben, solange die richti- ge Position nicht gefunden ist. Der resultierende Algorithmus nimmt die folgende Form an:
procedure insertionsort(n, var a);
for k = 1 to n − 1 do begin y ← a
k+1; i ← k;
while i ≥ 1 and a
i> y do begin a
i+1← a
i; i ← i − 1
end;
a
i+1← y end
Die Funktion wird mit dem Vektor a = (a
1, . . . , a
n) aufgerufen und ¨ uberschreibt ihn mit dem aufsteigend sortierten Vektor
ba = (ˆ a
1, . . . , ˆ a
n).
Es stellt sich die Frage nach dem Arbeitsaufwand, den dieser Sortieralgorithmus mit
sich bringt. Ein sinnvolles Maß f¨ ur den Aufwand ist die Anzahl der Vergleiche, die der
Algorithmus im ung¨ unstigsten Fall ben¨ otigt. Im schlimmsten Fall wird die innere Schleife
1.1 Beispiel: Sortieren
k Vergleiche ben¨ otigen, so dass insgesamt
n−1
X
k=1
k = n(n − 1) 2
Vergleiche anfallen. F¨ ur große Vektoren erwarten wir also einen Aufwand von ungef¨ ahr n
2/2 Vergleichsoperationen.
Ein weiterer einfacher Sortieralgorithmus ist das bubblesort -Verfahren: F¨ ur jedes i ∈ {1, . . . , n − 1} wird a
imit a
i+1verglichen, und falls a
i> a
i+1gelten sollte, werden die beiden Eintr¨ age getauscht. Dieses Vorgehen wird wiederholt, bis alle Eintr¨ age in der richtigen Reihenfolge vorliegen.
procedure bubblesort(n, var a);
repeat σ ← 0;
for i = 1 to n − 1 do if a
i> a
i+1then begin
h ← a
i+1; a
i+1← a
i; a
i← h;
σ ← σ + 1 end
until σ = 0
Nach dem ersten Durchgang der inneren Schleife ist sicher gestellt, dass das gr¨ oßte Element im letzten Eintrag des Vektors angekommen ist, nach dem zweiten ist auch das zweitgr¨ oßte an seinem Ort angekommen, nach dem k-ten Durchgang stehen die k gr¨ oßten Elemente sortiert am Ende des Vektors, so dass nach n − 1 Durchg¨ angen der Vektor vollst¨ andig sortiert ist. Die Anzahl der Vergleiche bel¨ auft sich also auf h¨ ochstens (n − 1)
2. Wir k¨ onnen den Algorithmus so modifizieren, dass die innere Schleife im k-ten Durchgang nur noch bis n − k l¨ auft, da die letzten k − 1 Eintr¨ age ja bereits sortiert sind.
Dann gen¨ ugen wie beim Sortieren durch Einf¨ ugen
n−1
X
k=1
(n − k) = n(n − 1) 2
Vergleichsoperationen, um den Vektor vollst¨ andig zu sortieren.
Beide Algorithmen sind zwar einfach, allerdings aufgrund des quadratisch mit dem Datenvolumen wachsenden Arbeitsaufwands f¨ ur große Vektoren zu langsam. Deshalb suchen wir nach einer schnelleren Variante.
Erfolgreich in diesem Bereich sind “divide and conquer”-Verfahren (lateinisch “divide et impera”, deutsch “teile und herrsche”), die auf der Idee beruhen, ein Problem in kleine Teilproblem zu zerlegen, die sich einfacher l¨ osen lassen, um dann aus den L¨ osungen der Teilprobleme eine L¨ osung des Gesamtproblems zu rekonstruieren.
Als Beispiel soll hier das mergesort -Verfahren vorgestellt werden. Zur Vereinfachung
der Darstellung beschr¨ anken wir uns auf den Fall, dass die L¨ ange der Vektoren eine
Zweierpotenz ist, dass also n = 2
pf¨ ur ein p ∈
N0gilt. Den zu sortierenden Vektor a k¨ onnen wir in zwei H¨ alften
b =
b
1b
2.. . b
n/2
:=
a
1a
2.. . a
n/2
, c =
c
1c
2.. . c
n/2
:=
a
n/2+1a
n/2+2.. . a
n
zerlegen. Wir gehen davon aus, dass wir die kleineren Teilvektoren b und c sortieren, dass wir also sortierte Vektoren
b
b=
ˆ b
1ˆ b
2.. . ˆ b
n/2
, ˆ b
1≤ ˆ b
2≤ . . . ≤ ˆ b
n/2,
bc =
ˆ c
1ˆ c
2.. . ˆ c
n/2
, ˆ c
1≤ ˆ c
2≤ . . . ≤ ˆ c
n/2praktisch konstruieren k¨ onnen. Sobald uns diese Vektoren zur Verf¨ ugung stehen, l¨ asst sich einfach der kleinste Eintrag des Vektors a berechnen, denn es gilt
min{a
1, . . . , a
n} = min{b
1, . . . , b
n/2, c
1, . . . , c
n/2}
= min{ ˆ b
1, . . . , ˆ b
n/2, ˆ c
1, . . . , c ˆ
n/2} = min{ ˆ b
1, c ˆ
1}.
Wir m¨ ussen lediglich pr¨ ufen, ob ˆ b
1kleiner oder gr¨ oßer als ˆ c
1ist. Im ersten Fall ist ˆ b
1der erste Eintrag ˆ a
1des gesuchten sortierten Vektors
ba, im zweiten Fall ist es ˆ c
1. F¨ ur die Berechnung des zweitkleinsten Eintrags bietet es sich an, den bereits berechneten kleinsten Eintrag aus unserer Menge zu entfernen und erneut nach dem Minimum zu suchen. Entsprechend k¨ onnen wir auch die folgenden Eintr¨ age des Ergebnisvektors
ba auf den Vergleich von jeweils nur zwei Zahlen zur¨ uckf¨ uhren.
procedure mergesort(n, var a);
if n ≥ 2 then begin
m
1← n/2; m
2← n − m
1; for i ∈ {1, . . . , m
1} do b
i← a
i; for i ∈ {1, . . . , m
2} do c
i← a
i+m1; mergesort(m
1, b);
mergesort(m
2, c);
k ← 1; ` ← 1;
for i = 1 to n do
if ` > m
2do begin a
i← b
k; k ← k + 1 end else if k > m
1do begin a
i← c
`; ` ← ` + 1 end else if b
k≤ c
`do begin a
i← b
k; k ← k + 1 end else begin a
i← c
`; ` ← ` + 1 end
end
1.1 Beispiel: Sortieren
7 3 8 4 5 8 9 1 6
7 3 8 4 5 8 9 1 6
3 4 7 8 1 5 6 8 9
1 3 4 5 6 7 8 8 9
Zerlegen
Teilprobleme sortieren
Zusammensetzen
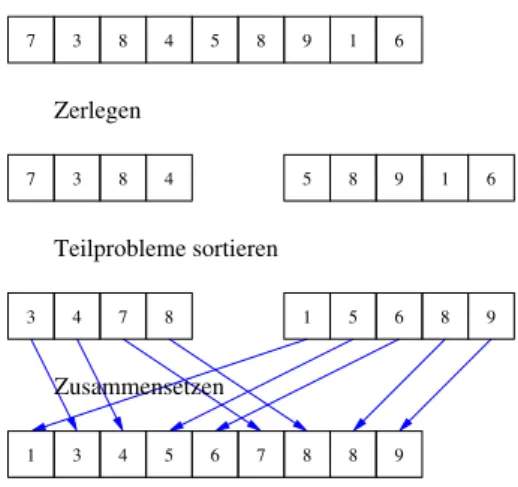
Abbildung 1.1: Prinzip des Mergesort-Algorithmus
Anschaulich gehen wir so vor, dass wir jeweils die ersten Eintr¨ age der beiden sortierten Teilvektoren
bb und
bc vergleichen, den kleineren der beiden in das Ergebnis ¨ ubernehmen und aus dem urspr¨ unglichen Vektor streichen, bis
ba vollst¨ andig gef¨ ullt ist. Dabei gibt k jeweils den ersten noch g¨ ultigen Eintrag in dem Vektor b
ban, w¨ ahrend ` dieselbe Rolle f¨ ur den Vektor
bc spielt und i den n¨ achsten zu bestimmenden Eintrag des Ergebnisvektors
ba festlegt. Wir pr¨ ufen zun¨ achst, ob einer der beiden Vektoren bereits leer ist. In diesem Fall ¨ ubernehmen wir einfach den Rest des anderen Vektors. Ansonsten vergleichen wir die kleinsten Eintr¨ age der beiden Vektoren und kopieren den kleineren.
Ist dieser Algorithmus nun schneller als der vorige? Zur Beantwortung dieser Frage bezeichnen wir die Anzahl der Vergleichsoperationen, die f¨ ur einen Vektor der L¨ ange n erforderlich sind, mit R
n. Da unser Algorithmus f¨ ur n = 1 nichts tut, gilt
R
1= 0.
F¨ ur n > 1 werden zun¨ achst die Teilvektoren sortiert, daf¨ ur sind R
m1und R
m2Ver- gleichsoperationen erforderlich. Um die beiden Teilvektoren zusammenzusetzen sind n Vergleiche erforderlich (Vergleiche der Laufvariablen z¨ ahlen wir nicht). Insgesamt erhal- ten wir die Formel
R
n= R
m+ R
n−m+ n.
Unsere Aufgabe besteht nun darin, diese Rekurrenzgleichung zu l¨ osen. Dazu beschr¨ anken wir uns zun¨ achst auf den Fall, dass n eine Zweierpotenz ist, dass also n = 2
pmit p ∈
N0gilt, und erhalten
R
2= 2R
1+ 2 = 2 = 2 · 1,
R
4= 2R
2+ 4 = 8 = 4 · 2,
R
8= 2R
4+ 8 = 24 = 8 · 3,
R
16= 2R
8+ 16 = 64 = 16 · 4,
R
32= 2R
16+ 32 = 160 = 32 · 5.
Diese Folge legt nahe, dass R
n= n log
2(n) gilt, und diese Gleichung l¨ asst sich in der Tat f¨ ur Zweierpotenzen auch direkt beweisen.
F¨ ur allgemeine n ∈
Nk¨ onnen wir immerhin noch eine Absch¨ atzung erhalten, indem wir geeignet auf- und abrunden. Dazu verwenden wir die Gauß-Klammern, die durch
bxc := max{n ∈
Z: n ≤ x}, dxe := min{n ∈
Z: x ≤ n} f¨ ur alle x ∈
Rdefiniert sind.
Lemma 1.1 (Rekurrenzabsch¨ atzung) Die durch R
1:= 0,
R
n:= R
m+ R
n−m+ n mit m := bn/2c f¨ ur alle n ∈
Ndefinierten Gr¨ oßen erf¨ ullen die Absch¨ atzung
R
n≤ ndlog
2(n)e (1.1)
f¨ ur alle n ∈
N.
Beweis. Wir f¨ uhren den Beweis per abschnittsweiser Induktion.
Induktionsanfang. F¨ ur n = 1 gilt R
1= 0 = 1 · 0 = 1dlog
2(1)e.
Induktionsvoraussetzung. Sei N ∈
Nso gegeben, dass (1.1) f¨ ur alle n ∈ [1 : N ] gilt.
Induktionsschritt. Sei n := N + 1. Falls n eine gerade Zahl ist, also n = 2m gilt, d¨ urfen wir die Induktionsvoraussetzung wegen m ≤ N anwenden, um
R
n= R
m+ R
n−m+ n = 2R
m+ n ≤ 2mdlog
2(n/2)e + n
= ndlog
2(n) − 1e + n = ndlog
2(n)e
zu erhalten. Falls n hingegen ungerade ist, m¨ ussen wir einen etwas genaueren Blick auf den Logarithmus werfen: Sei p := dlog
2(n)e, es gelte also p − 1 < log
2(n) ≤ p und damit auch 2
p−1< n ≤ 2
p. Wegen n = N + 1 ≥ 2 muss p ≥ 1 gelten, also ist 2
pgerade. Da n ungerade ist, folgt n < 2
p, also 2
p−1< n + 1 ≤ 2
pund somit dlog
2(n + 1)e = dlog
2(n)e, so dass wir
dlog
2(m)e = dlog
2((n − 1)/2)e = dlog
2(n − 1)e − 1 ≤ dlog
2(n)e − 1, dlog
2(n − m)e = dlog
2((n + 1)/2)e = dlog
2(n + 1)e − 1 = dlog
2(n)e − 1
erhalten. Wir haben m = (n−1)/2 = N/2 ≤ N, d¨ urfen also die Induktionsvoraussetzung auf R
manwenden. Da n = N +1 ≥ 2 gilt, also m ≥ 1, haben wir auch n−m ≤ n−1 = N , so dass wir die Induktionsvoraussetzung auch auf R
n−manwenden k¨ onnen und
R
n= R
m+ R
n−m+ n ≤ mdlog
2(m)e + (n − m)dlog
2(n − m)e + n
≤ n(dlog
2(n)e − 1) + n = ndlog
2(n)e erhalten. Damit ist der Beweis vollst¨ andig.
Unser neuer Algorithmus ben¨ otigt also lediglich eine zu n log
2n proportionale Anzahl
von Operationen anstelle einer zur n
2proportionalen, so dass beispielsweise das Sortieren
von n = 2
20≈ 1 000 000 Zahlen mit 2
20· 20 ≈ 20 000 000 Vergleichsoperationen erfolgen
kann statt mit
n(n−1)2≈ 500 000 000 000. In diesem Fall ist mergesort um einen Faktor
von ungef¨ ahr 25 000 schneller.
1.2 Beispiel: Schnelle Fourier-Transformation
1.2 Beispiel: Schnelle Fourier-Transformation
Wir untersuchen die Berechnung der Fourier-Transformation eines Vektors x ∈
Cnmit geradem n ∈
N. Sie ist gegeben durch
x =
x
0x
1.. . x
n−1
, x ˆ
ν:=
n−1
X
j=0
x
je
−2πiνj/n,
bx :=
ˆ x
0ˆ x
1.. . ˆ x
n−1
Wenn wir die n Werte des Vektors
bx in dieser Weise berechnen, m¨ ussen f¨ ur jeden minde- stens n Multiplikationen durchgef¨ uhrt werden, so dass mindestens n
2Rechenoperationen erforderlich werden. Die Berechnung l¨ asst sich wesentlich schneller durchf¨ uhren, wenn wir die Struktur der in der Formel auftretenden Koeffizienten ausnutzen: Wir setzen m := n/2 und zerlegen die Summe in eine Summe ¨ uber gerade Indizes j = 2k und eine Summe ¨ uber ungerade Indizes j = 2k + 1 und erhalten
ˆ x
ν=
n−1
X
j=0
x
je
−2πiνj/n=
m−1
X
k=0
x
2ke
−2πiν2k/n+
m−1
X
k=0
x
2k+1e
−2πiν(2k+1)/n=
m−1
X
k=0
x
2ke
−2πiνk/m+ e
−2πiν/nm−1
X
k=0
x
2k+1e
−2πiνk/m. (1.2) Falls ν ∈ {0, . . . , m − 1} gelten sollte, stellen wir fest, dass die erste Summe gerade die Fourier-Transformierte des Vektors der geraden Indizes ist,
y :=
x
0x
2.. . x
n−2
, y ˆ
µ:=
m−1
X
k=0
y
ke
−2πiµk/m,
by :=
ˆ y
0ˆ y
1.. . ˆ y
m−1
,
w¨ ahrend sich die zweite Summe als Fourier-Transformierte des Vektors der ungeraden Indizes entpuppt, also als
z :=
x
1x
3.. . x
n−1
, z ˆ
µ:=
m−1
X
k=0
z
ke
−2πiµk/m,
bz :=
ˆ z
0ˆ z
1.. . ˆ z
m−1
.
In diesem Fall k¨ onnen wir also statt einer Fouriertransformation f¨ ur einen Vektor der L¨ ange n zwei Fouriertransformationen f¨ ur Vektoren der L¨ ange m = n/2 durchf¨ uhren und anschließend die Ergebnisse kombinieren, um das Ergebnis zu berechnen: Gem¨ aß (1.2) gilt die Gleichung
ˆ
x
ν= ˆ y
ν+ e
−2πiν/nz ˆ
νf¨ ur alle ν ∈ {0, . . . , m − 1}.
Falls dagegen ν ∈ {m, . . . , n − 1} gilt, k¨ onnen wir die Periodizit¨ at der komplexen Expo- nentialfunktion ausnutzen: Es gelten
e
−2πiνk/m= e
−2πi(ν−m)k/m, e
−2πiν/n= −e
−2πi(ν−m)/n, und wir k¨ onnen (1.2) in der Form
ˆ x
ν=
m−1
X
k=0
y
ke
−2πiνk/m+ e
−2πiν/nm−1
X
k=0
z
ke
−2πiνk/m=
m−1
X
k=0
y
ke
−2πi(ν−m)k/m− e
−2πi(ν−m)/n m−1X
k=0
z
ke
−2πi(ν−m)k/m= ˆ y
ν−m− e
−2πi(ν−m)/nˆ
z
ν−mf¨ ur alle ν ∈ {m, . . . , n − 1}
schreiben und so ebenfalls auf Grundlage der Hilfsvektoren
by und
bz berechnen.
Falls wir voraussetzen, dass auch n/2, n/4 und so weiter gerade sind, falls also n = 2
pf¨ ur ein p ∈
N0gilt, k¨ onnen wir diese Rechenvorschrift rekursiv anwenden, um den besonders schnellen Algorithmus von Cooley und Tukey f¨ ur die Berechnung der Fourier- Transformation zu erhalten:
procedure fft(n, x, var
bx) if n = 1 then
ˆ x
0= x
0else begin
m ← n/2;
for k ∈ {0, . . . , m − 1} do begin y
k← x
2k; z
k← x
2k+1end;
fft(m, y,
by);
fft(m, z,
bz);
γ ← 1; ω ← e
−2πi/n;
for ν = 0 to m − 1 do begin ˆ
x
ν← y ˆ
ν+ γ z ˆ
ν; x ˆ
ν+m← y ˆ
ν− γ z ˆ
ν; γ ← γω
end end
Hier werden die Werte e
−2πiν/nmit Hilfe der n-ten Einheitswurzel ω = e
−2πi/nberechnet, um m¨ oglichst selten die aufwendige Berechnung der komplexen Exponentialfunktion zu ben¨ otigen. Es gilt ω
ν= (e
−2πi/n)
ν= e
−2πiν/n, und diese Koeffizienten werden der Reihe nach f¨ ur ν = 0, . . . , m in der Variablen γ bereit gestellt.
Wir haben bereits gezeigt, dass der Algorithmus das richtige Ergebnis berechnet, wir
k¨ onnen aber auch zeigen, dass er das schneller als der urspr¨ ungliche Ansatz tut: Dazu be-
zeichnen wir mit R
ndie Anzahl der arithmetischen Operationen, die f¨ ur eine Vektorl¨ ange
von n ∈
Nben¨ otigt wird. F¨ ur n = 1 ben¨ otigt unser Algorithmus keine arithmetischen
1.2 Beispiel: Schnelle Fourier-Transformation Operationen (Kopiervorg¨ ange z¨ ahlen wir nicht mit), es gilt also R
1= 0. F¨ ur ein gerades n ∈
Nfallen zwei rekursive Aufrufe f¨ ur Vektoren der L¨ ange n/2 an, also ein Aufwand von 2R
n/2. Die Berechnung der Einheitswurzel ω z¨ ahlen wir als eine Operation. In der Schleife f¨ ur ν m¨ ussen jeweils zwei Multiplikationen, eine Addition und eine Subtraktion ausgef¨ uhrt werden, um ˆ x
νund ˆ x
ν+mzu bestimmen. Insgesamt fallen also
R
n= 2R
n/2+ 4n/2 + 1 = 2R
n/2+ 2n + 1
arithmetische Operationen an. Ausgehend von R
1= 0 k¨ onnen wir diese Gleichung aufl¨ osen: Wir verwenden den Ansatz R
n= 2n log
2n + n − 1. Falls die Gleichung f¨ ur n/2 gilt, folgt
R
n= 2R
n/2+ 2n + 1 = 2(2(n/2) log
2(n/2) + (n/2) − 1) + 2n + 1
= 2n(log
2(n) − 1) + n − 2 + 2n + 1 = 2n log
2(n) + n − 1.
Der Rechenaufwand w¨ achst also fast linear mit der Dimension des Vektors.
2 Lineare Gleichungssysteme
2.1 Beispiel: Differentialgleichung
F¨ ur eine gegebene Funktion f ∈ C[0, 1] m¨ ochten wir eine Funktion u ∈ C
2[0, 1] finden, die die Differentialgleichung
−u
00(t) = f (t) f¨ ur alle t ∈ (0, 1) (2.1) mit den Randbedingungen
u(0) = 0, u(1) = 0
erf¨ ullt. Da die L¨ osung aus einem unendlich-dimensionalen Funktionenraum stammt und sich deshalb nicht in der endlichen Speichermenge, die einem Computer zur Verf¨ ugung steht, darstellen l¨ asst, gehen wir zu einer N¨ aherungsl¨ osung ¨ uber: F¨ ur ein n ∈
Nersetzen wir das kontinuierliche Intervall [0, 1] durch die durch
t
i:= hi, h := 1
n + 1 f¨ ur alle i ∈ {0, . . . , n + 1}
gegebene diskrete Punktmenge {t
0, . . . , t
n+1}. Wir sind nur noch daran interessiert, die Werte der L¨ osung in diesen Punkten zu berechnen, also
x
i:= u(t
i) f¨ ur alle i ∈ {0, . . . , n + 1}.
Die Werte x
0und x
n+1brauchen wir nicht zu berechnen, weil sie bereits durch die Randbedingungen
x
0= u(t
0) = u(0) = 0, x
n+1= u(t
n+1) = u(1) = 0 festgelegt sind
Um ein praktisch l¨ osbares Problem zu erhalten, m¨ ussen wir die Ableitung in der Differentialgleichung durch etwas ersetzen, das sich mit Hilfe der Werte x
0, . . . , x
n+1berechnen l¨ asst. Nach Definition der Ableitung gelten u
0(t
i) ≈ u(t
i+1) − u(t
i)
h , u
0(t
i) ≈ u(t
i) − u(t
i−1)
h ,
und indem wir die erste Approximation in die zweite einsetzen folgt u
00(t
i) ≈ u(t
i+1) − 2u(t
i) + u(t
i−1)
h
2. (2.2)
Durch Einsetzen in unsere Differentialgleichung erhalten wir
−x
i+1+ 2x
i− x
i−1h
2≈ −u
00(t
i) = f (t
i) f¨ ur alle i ∈ {1, . . . , n}.
Wir k¨ onnen also N¨ aherungen der Werte x
iberechnen, indem wir das lineare Gleichungs- system
−˜ x
i+1+ 2˜ x
i− x ˜
i−1h
2= f (t
i) f¨ ur alle i ∈ {1, . . . , n}
mit n Gleichungen und den n Unbekannten ˜ x
1, . . . , x ˜
naufl¨ osen. Damit folgt u(t
i) = x
i≈
˜
x
i, wir haben also eine N¨ aherung der L¨ osung in den Punkten t
1, . . . , t
ngefunden, die sich ohne explizite Kenntnis der Funktion u berechnen l¨ asst.
Zur Vereinfachung fassen wir die Unbekannten und die rechte Seite zu Vektoren zu- sammen und stellen das Gleichungssystem durch eine Matrix dar:
A := 1 h
2
2 −1
−1 . .. ...
. .. ... −1
−1 2
, x :=
˜ x
1˜ x
2.. .
˜ x
n
, b :=
f (t
1) f (t
2)
.. . f(t
n)
. (2.3)
Damit haben wir eine Matrix A ∈
Rnund einen Vektor b ∈
Rnund suchen einen Vektor x ∈
Rn, der die Gleichung
Ax = b
l¨ ost. Die L¨ osung der Gleichung k¨ onnen wir dann als N¨ aherung der L¨ osung der Diffe- rentialgleichung interpretieren. Da sie die kontinuierliche Punktmenge [0, 1] durch die diskrete Punktmenge {t
0, t
1, . . . , t
n+1} ersetzt, bezeichnet man sie als Diskretisierung der Differentialgleichung (2.1).
Bemerkung 2.1 (Genauigkeit) Falls u viermal stetig differenzierbar ist, k¨ onnen wir die Taylor-Entwicklung um t
iin Kombination mit dem Zwischenwertsatz verwenden, um
u(t
i+1) − 2u(t
i) + u(t
i−1)
h
2= u
00(t
i) + h
212 u
(4)(η)
mit einem Punkt η ∈ [t
i−1, t
i+1] zu beweisen. Unsere N¨ aherung der zweiten Ableitung sollte unter diesen Bedingungen also relativ genau sein, falls das Quadrat der Schrittweite h klein im Verh¨ altnis zu der vierten Ableitung ist.
Bemerkung 2.2 (Verallgemeinerung) Differenzenquotienten der Form (2.2) lassen
sich erheblich verallgemeinern, um partielle Differentialgleichungen aus vielen verschie-
denen Anwendungsgebieten (Elektrostatik und -dynamik, Str¨ omungsdynamik, Struktur-
mechanik) zu behandeln. Besonders erfolgreich ist die Methode der finiten Elemente, die
sich besonders gut f¨ ur die Behandlung komplizierter Geometrien eignet.
2.2 Allgemeine Aufgabenstellung
2.2 Allgemeine Aufgabenstellung
Wir interessieren uns f¨ ur Verfahren, mit denen sich allgemeine lineare Gleichungssysteme der Form
a
11x
1+ a
12x
2+ . . . + a
1nx
n= b
1, a
21x
1+ a
22x
2+ . . . + a
2nx
n= b
2,
.. .
a
n1x
1+ a
n2x
2+ . . . + a
nnx
n= b
nl¨ osen lassen. Wie zuvor verwenden wir die Matrix A ∈
Rn×nund die Vektoren x, b ∈
Rn, gegeben durch
A =
a
11a
12. . . a
1na
21a
22. . . a
2n.. . .. . . .. .. . a
n1a
n2. . . a
nn
, x =
x
1x
2.. . x
n
, b =
b
1b
2.. . b
n
,
um die Gleichung in der kompakten Schreibweise
Ax = b (2.4)
darstellen zu k¨ onnen. Im Folgenden werden wir Matrizen immer mit Großbuchstaben A, L, . . . bezeichnen, w¨ ahrend wir f¨ ur ihre Eintr¨ age die entsprechenden Kleinbuchstaben a
ij, `
jk, . . . verwenden.
2.3 Dreiecksmatrizen
Bevor wir uns allgemeinen linearen Gleichungssystemen zuwenden, untersuchen wir zun¨ achst zwei wichtige Spezialf¨ alle:
Definition 2.3 (Dreiecksmatrizen) Seien L, R ∈
Rn×n. Falls
`
ij= 0 f¨ ur alle i < j gilt, nennen wir L eine untere Dreiecksmatrix. Falls
r
ij= 0 f¨ ur alle i > j gilt, nennen wir R eine obere Dreiecksmatrix.
Ob eine Dreiecksmatrix regul¨ ar ist, l¨ asst sich besonders einfach nachpr¨ ufen: Eine be-
liebige quadratische Matrix ist genau dann regul¨ ar, wenn ihre Determinante ungleich
null ist, und die Determinante einer Dreiecksmatrix ist gerade das Produkt ihrer Diago- nalelemente: F¨ ur eine untere Dreiecksmatrix L ∈
Rn×nund eine obere Dreiecksmatrix R ∈
Rn×ngelten
det(L) =
n
Y
i=1
`
ii, det(R) =
n
Y
i=1
r
ii,
also sind beide Matrizen genau dann regul¨ ar, wenn alle Diagonalelemente ungleich null sind.
Lineare Gleichungssysteme mit regul¨ aren Dreiecksmatrizen lassen sich besonders ein- fach aufl¨ osen. F¨ ur die Herleitung der entsprechenden Algorithmen zerlegen wir die Auf- gabe wieder in kleinere Teilaufgaben: Wir f¨ uhren Teilmatrizen
L
∗∗=
`
22.. . . ..
`
n2. . . `
nn
, L
∗1=
`
21.. .
`
n1
und Teilvektoren
x
∗=
x
2.. . x
n
, b
∗=
b
2.. . b
n
ein und schreiben das zu l¨ osende Gleichungssystem Lx = b in Blockform:
`
11L
∗1L
∗∗x
1x
∗
= Lx = b = b
1b
∗
.
Durch Einsetzen der Teilvektoren und -matrizen sieht man leicht, dass beide Gleichungen
¨ aquivalent sind. Blockmatrizen und -vektoren lassen sich genau wie
” normale“ Matrizen und Vektoren multiplizieren, so dass wir aus der Blockform der Gleichung die Beziehung
b
1b
∗
= `
11L
∗1L
∗∗x
1x
∗
=
`
11x
1L
∗1x
1+ L
∗∗x
∗
erhalten. Komponentenweise gesehen ergeben sich die Gleichungen
`
11x
1= b
1, L
∗1x
1+ L
∗∗x
∗= b
∗,
von denen sich die erste einfach aufl¨ osen l¨ asst: Da L als regul¨ ar vorausgesetzt ist, gilt
`
116= 0, so dass wir die Gleichung
x
1= b
1`
11erhalten. Da wir x
1nun kennen, k¨ onnen wir die zweite Gleichung in die Form
L
∗∗x
∗= b
∗− L
∗1x
12.3 Dreiecksmatrizen bringen und stellen fest, dass wir wieder ein lineares Gleichungssystem mit einer unteren Dreiecksmatrix erhalten haben, allerdings diesmal mit lediglich n−1 Unbekannten. Falls n > 1 gelten sollte, k¨ onnen wir die beiden Schritte (Division durch das Diagonalelement, Subtraktion einer Spalte von der rechten Seite b) auf immer kleiner werdende Matrizen anwenden, bis x
∗berechnet ist. Wir erhalten den folgenden Algorithmus:
procedure forward subst(n, L, var b, x);
for j = 1 to n do begin x
j← b
j/`
jj;
for i ∈ {j + 1, . . . , n} do b
i← b
i− `
ijx
jend
Wie man sieht wird zun¨ achst x
1berechnet, dann wird von b
∗der Vektor L
∗1x
1sub- trahiert und anschließend zu dem durch L
∗∗definierten Teilproblem ¨ ubergegangen. Die Variable j gibt dabei jeweils den Index des linken oberen Elements der gerade behan- delten Teilmatrix an.
In praktischen Implementierungen wird man in der Regel auf den zus¨ atzlichen Vek- tor x verzichten und den Vektor b im Zuge des Verfahrens mit den Komponenten des L¨ osungsvektors ¨ uberschreiben.
Aus naheliegenden Gr¨ unden bezeichnet man dieses Verfahren mit dem Namen Vorw¨ artseinsetzen.
F¨ ur obere Dreiecksmatrizen k¨ onnen wir ¨ ahnlich vorgehen. Wir verwenden die Zerle- gung
R
∗∗R
∗nr
nnx
∗x
n= Rx = b = b
∗b
nmit passend definierten Teilvektoren und -matrizen und erhalten die Gleichungen r
nnx
n= b
n, R
∗∗x
∗+ R
∗nx
n= b
∗,
die wir in die Form
x
n= b
n/r
nn, R
∗∗x
∗= b
∗− R
∗nx
nbringen k¨ onnen, die sich ¨ ahnlich wie zuvor direkt in einen Algorithmus ¨ ubersetzen l¨ asst:
procedure backward subst(n, R, var b, x);
for j = n downto 1 do begin x
j← b
j/r
jj;
for i ∈ {1, . . . , j − 1} do b
i← b
i− r
ijx
jend
In diesem Fall gibt j jeweils den Index des rechten unteren Elements der gerade behan-
delten Teilmatrix an. Auch hier l¨ asst sich der zus¨ atzliche Vektor x einsparen, wenn man
die Eintr¨ age des Vektors b mit dem Ergebnis ¨ uberschreibt. Es ¨ uberrascht nicht, dass dieser Algorithmus unter dem Namen R¨ uckw¨ artseinsetzen bekannt ist.
Nat¨ urlich m¨ ussen wir uns auch in diesem Fall wieder die Frage stellen, wie groß der Rechenaufwand unserer Algorithmen ist. Traditionell werden dabei lediglich die arith- metischen Operationen mit reellen Zahlen gez¨ ahlt und nicht Kopiervorg¨ ange oder Ma- nipulationen der Indizes. In diesem Sinne ben¨ otigt das Vorw¨ artseinsetzen
n
X
j=1
(1 + 2(n − j)) = n + 2
n
X
j=1
(n − j) = n + 2
n−1
X
j=0
j = n + 2 n(n − 1) 2 = n
2Operationen, und dasselbe Ergebnis erhalten wir auch f¨ ur das strukturell sehr ¨ ahnliche R¨ uckw¨ artseinsetzen. Da bei beiden Operationen jeweils
n
X
i=1
i = n(n + 1) 2 > n
22
Matrixeintr¨ age verarbeitet werden m¨ ussen, ist dieser Rechenaufwand kaum weiter zu reduzieren, der Algorithmus darf also als effizient angesehen werden.
2.4 LR-Zerlegung
Unser Ziel ist es nun, das L¨ osen des allgemeinen linearen Gleichungssystems (2.4) auf das L¨ osen unterer und oberer Dreiecksmatrizen zur¨ uckzuf¨ uhren, denn diese Aufgaben lassen sich mit den bereits diskutierten Verfahren einfach l¨ osen. Die Idee besteht darin, die Matrix als ein Produkt aus einer unteren und einer oberen Dreiecksmatrix darzustellen:
Definition 2.4 (LR-Zerlegung) Sei A ∈
Rn×neine Matrix. Sei L ∈
Rn×neine untere und R ∈
Rn×neine obere Dreiecksmatrix. Falls
A = LR (2.5)
gilt, bezeichnen wir das Paar (L, R) als eine LR-Zerlegung der Matrix A.
Falls uns eine LR-Zerlegung zur Verf¨ ugung steht, k¨ onnen wir das Gleichungssystem in der Form
b = Ax = LRx
schreiben und mit dem Hilfsvektor y = Rx auf die Gleichungen
b = Ly, y = Rx
zur¨ uckf¨ uhren, die sich durch Vorw¨ arts- und R¨ uckw¨ artseinsetzen einfach aufl¨ osen lassen.
Also wenden wir uns der Aufgabe zu, zu einer gegebenen Matrix A eine LR-Zerlegung zu konstruieren. Dazu zerlegen wir die beteiligten Matrizen wieder in Teilmatrizen
A
∗∗=
a
22. . . a
2n.. . . .. .. . a
n2. . . a
nn
, A
∗1=
a
21.. . a
n1
, A
1∗= a
12. . . a
1n,
2.4 LR-Zerlegung
L
∗∗=
`
22.. . . ..
`
n2. . . `
nn
, L
∗1=
`
21.. .
`
n1
,
R
∗∗=
r
22. . . r
2n. .. .. . r
nn
, R
1∗= r
12. . . r
1nund stellen die definierende Gleichung (2.5) in der Form a
11A
1∗A
∗1A
∗∗
= A = LR = `
11L
∗1L
∗∗r
11R
1∗R
∗∗
dar. Komponentenweise gelesen ergeben sich aus dieser Gleichung die Beziehungen
a
11= `
11r
11, (2.6a)
A
∗1= L
∗1r
11, (2.6b)
A
1∗= `
11R
1∗, (2.6c)
A
∗∗= L
∗1R
1∗+ L
∗∗R
∗∗, (2.6d) die wir der Reihe nach aufl¨ osen k¨ onnen. Wir gehen dazu f¨ ur den Augenblick davon aus, dass a
116= 0 gilt, und stellen fest, dass `
11= 1 und r
11= a
11die erste Gleichung (2.6a) erf¨ ullen. Da wir diese beiden Zahlen nun kennen, k¨ onnen wir die Gleichungen (2.6b) und (2.6c) aufl¨ osen:
L
∗1= A
∗1/r
11, R
1∗= A
1∗. Mit diesen Vektoren bringen wir die vierte Gleichung (2.6d) in die Form
A
∗∗− L
∗1R
1∗= L
∗∗R
∗∗und stellen fest, dass es uns wieder gelungen ist, ein Problem der Dimension n auf ein gleichartiges Problem der Dimension n − 1 zu reduzieren: Die Matrizen L
∗∗und R
∗∗ergeben sich aus der LR-Zerlegung der Matrix A
∗∗− L
∗1R
1∗.
Bei der praktischen Umsetzung dieser Konstruktion ist es wichtig, den zur Verf¨ ugung stehenden Speicher m¨ oglichst geschickt auszunutzen. Da wir in der Regel die Matrix A nicht mehr ben¨ otigen, sobald wir ihre Zerlegung kennen, k¨ onnen wir den von ihr benutz- ten Speicher mit den Daten der Zerlegung ¨ uberschreiben: Die erste Zeile k¨ onnen wir mit R
1∗uberschreiben, die erste Spalte kann ¨ L
∗1aufnehmen, der Koeffizient `
11muss nicht gespeichert werden, weil er nach Definition immer gleich eins ist. Entsprechend k¨ onnen wir A
∗∗mit der Matrix A
∗∗− L
∗1R
1∗¨ uberschreiben und erhalten als Zwischenergebnis
r
11r
12. . . r
1n`
21a
22− `
21r
12. . . a
2n− `
21r
1n.. . .. . . .. .. .
`
n1a
n2− `
n1r
12. . . a
nn− `
n1r
1n
.
Mit der rechten unteren Teilmatrix k¨ onnen wir nun in derselben Weise verfahren, um die n¨ achsten Zeilen und Spalten der Faktoren L und R zu konstruieren, bis wir schließlich das Ergebnis
r
11r
12. . . r
1n`
21r
22. .. .. . .. . . .. . .. r
n−1,n`
n1. . . `
n,n−1r
nn
, (2.7)
konstruiert haben, das die vollst¨ andige LR-Zerlegung in sehr kompakter Form beschreibt.
Man k¨ onnte diesen Algorithmus rekursiv umsetzen, so wie wir es bei dem mergesort - Algorithmus und der schnellen Fourier-Transformation getan haben, aber in diesem Fall ist es einfacher und effizienter, eine Variable k einzuf¨ uhren, die angibt, welche Zeile und Spalte der Matrizen L und R als n¨ achstes zu berechnen ist. Dann erhalten wir die folgende Rechenvorschrift:
procedure lr decomp(n, var A);
for k = 1 to n do begin for i ∈ {k + 1, . . . , n} do
a
ik← a
ik/a
kk; { `
ik← a
ik/r
kk} for i, j ∈ {k + 1, . . . , n} do
a
ij← a
ij− a
ika
kj{ a
ij← a
ij− `
ikr
kj} end
Nat¨ urlich m¨ ussen wir auch in diesem Fall untersuchen, wie hoch der Rechenaufwand ist.
Indem wir z¨ ahlen, wieviele Rechenoperationen in den Schleifen auftreten und wie oft sie durchlaufen werden, erhalten wir
n
X
k=1
(n − k) + 2(n − k)
2=
n−1
X
k=0
k + 2
n−1
X
k=0
k
2= n(n − 1)
2 + 2 n(n − 1)(2n − 1) 6
= 3n(n − 1) + 2n(n − 1)(2n − 1)
6 = n(n − 1)(4n + 1)
6
= n(4n
2− 4n + n − 1)
6 < 2
3 n
3Operationen. Der kubische Rechenaufwand wird dadurch relativiert, dass wir ihn nur einmal f¨ ur jede Matrix betreiben m¨ ussen: Sobald die LR-Zerlegung vorliegt, erfordert das L¨ osen f¨ ur eine beliebige rechte Seite nur noch quadratischen Aufwand.
Der Aufwand l¨ asst sich weiter reduzieren, wenn wir besondere Eigenschaften der Ma-
trix ausnutzen k¨ onnen. Ein Beispiel ist die Tridiagonalmatrix, die wir in unserem Bei-
spiel (2.3) kennen gelernt haben: Da a
31= a
41= . . . = a
n1= 0 und a
13= a
14= . . . =
a
1n= 0 gelten, m¨ ussen wir in unserem Algorithmus diese Werte nicht ber¨ ucksichtigen
und k¨ onnen den ersten Schritt mit nur drei Rechenoperationen ausf¨ uhren. Da auch die
verbleibende Teilmatrix tridiagonal ist, stellen wir fest, dass insgesamt nicht mehr als
3n Operationen erforderlich sind. Entsprechend k¨ onnen wir auch das Vorw¨ arts- und
2.4 LR-Zerlegung R¨ uckw¨ artseinsetzen mit jeweils nicht mehr als 3n Operationen durchf¨ uhren, erhalten also einen L¨ osungsalgorithmus, dessen Rechenaufwand linear mit der Matrixdimension w¨ achst. Viel effizienter kann ein Algorithmus nicht sein, der n Koeffizienten des Ergeb- nisvektors x berechnet.
Jetzt k¨ onnen wir uns einem Punkt widmen, den wir bisher vernachl¨ assigt haben:
Unsere Konstruktion ist nur durchf¨ uhrbar, falls a
116= 0 gilt, denn bei der Berechnung von L
∗1wird durch r
11= a
11dividiert. Da der Algorithmus auch auf Teilmatrizen angewendet wird, muss sicher gestellt sein, dass auch bei allen auftretenden Teilmatrizen diese Bedingung erf¨ ullt ist.
In diesem Zusammenhang wird h¨ aufig der Fehler begangen, nicht zwischen den Dia- gonalelementen der Matrix A und den Diagonalelementen der Matrizen A
∗∗zu unter- scheiden. Diese Unterscheidung ist allerdings wichtig: Wenn wir die Beispiele
B = 1 2
2 4
, C =
1 2 2 0
untersuchen, stellen wir fest, dass nach dem ersten Schritt unseres Algorithmus B
∗∗= 0 und C
∗∗= −4 gelten. Im ersten Fall besitzt also B
∗∗eine Null auf der Diagonalen, obwohl B das nicht tut. Im zweiten Fall besitzt zwar C eine Null auf der Diagonalen, aber C
∗∗nicht.
In der Praxis sind wir nat¨ urlich daran interessiert, ein Verfahren zu benutzen, das f¨ ur alle regul¨ aren Matrizen A funktioniert. Beispielsweise ist das System
0 2 1 0
x
1x
2
= 2
1
problemlos l¨ osbar und die Matrix auch regul¨ ar, aber da der linke obere Eintrag gleich null ist, k¨ onnen wir keine LR-Zerlegung finden. Es gibt allerdings einen einfachen Ausweg:
Wir tauschen die erste und zweite Zeile des Systems, um 1 0
0 2 x
1x
2
= 1
2
zu erhalten. Die in diesem System auftretende Matrix besitzt eine LR-Zerlegung. Wir d¨ urfen also hoffen, dass wir durch das Umordnen der Zeilen der Matrix zu einem allge- mein einsetzbaren Verfahren kommen.
Definition 2.5 (Permutationsmatrix) Sei P ∈
Rn×n. Falls in jeder Zeile von P genau ein Eintrag gleich eins und alle anderen gleich null sind und falls dasselbe auch f¨ ur jede Spalte gilt, heißt P Permutationsmatrix.
Bemerkung 2.6 (Permutation) Unter einer Permutation versteht man eine Abbil- dung π : {1, . . . , n} → {1, . . . , n}, die bijektiv ist, also lediglich eine Umordnung der Zahlen von 1 bis n beschreibt.
Wenn P eine Permutationsmatrix ist, k¨ onnen wir
π(j) = i f¨ ur alle i, j ∈ {1, . . . , n} mit p
ij= 1
definieren. Da jede Spalte der Matrix P nur genau eine Eins enth¨ alt, ist π wohldefi- niert. Da jede Zeile nur genau eine Eins enth¨ alt, ist π auch injektiv und damit eine Permutation. F¨ ur einen beliebigen Vektor x ∈
Rngilt
Px =
x
π(1).. . x
π(n)
,
also beschreibt die Matrix P gerade die Umordnung der Zeilen des Vektors entsprechend der zugeh¨ origen Permutation π.
Lemma 2.7 (Permutationsmatrizen) Seien P, Q ∈
Rn×nPermutationsmatrizen.
Dann ist auch ihr Produkt PQ eine Permutationsmatrix.
Beweis. Sei i ∈ {1, . . . , n}. Da P eine Permutationsmatrix ist, existiert genau ein ˆ j ∈ {1, . . . , n} mit p
iˆj= 1. Da Q ebenfalls eine Permutationsmatrix ist, existiert genau ein ˆ k ∈ {1, . . . , n} mit q
ˆjˆk= 1, und wir erhalten
(PQ)
ik=
n
X
j=1
p
ijq
jk= q
ˆjk=
(
1 falls k = ˆ k,
0 ansonsten f¨ ur alle k ∈ {1, . . . , n}, also enth¨ alt die i-te Zeile des Produkts nur genau eine Eins und ist ansonsten gleich null.
Entsprechend k¨ onnen wir mit den Spalten verfahren.
Unser Ziel ist es nun, mit Hilfe einer geeigneten Permutation LR-Zerlegungen f¨ ur beliebige regul¨ are Matrizen zu konstruieren. Man spricht von einer LR-Zerlegung mit Pivotsuche oder einer pivotisierten LR-Zerlegung.
Satz 2.8 (LR-Zerlegung mit Pivotsuche) Sei A eine regul¨ are Matrix. Dann exi- stiert eine Permutationsmatrix P ∈
Rn×nso, dass die Matrix PA eine LR-Zerlegung (L, R) besitzt, dass also
PA = LR
mit einer unteren Dreiecksmatrix L und einer oberen Dreiecksmatrix R gilt.
Beweis. Wir f¨ uhren den Beweis per Induktion ¨ uber n ∈
N. F¨ ur n = 1 setzen wir p
11= 1,
`
11= 1 und r
11= a
11und sind fertig.
Sei nun n ∈
N≥2so gegeben, dass die Behauptung f¨ ur alle Matrizen A ∈
R(n−1)×(n−1)gilt. Sei A ∈
Rn×nregul¨ ar. Um den bereits bekannten Zugang anwenden zu k¨ onnen, m¨ ussen wir daf¨ ur sorgen, dass der Eintrag a
11nicht gleich null ist. Dieses Ziel erreichen wir, indem wir ein i
∗∈ {1, . . . , n} mit
|a
i∗1| ≥ |a
i1| f¨ ur alle i ∈ {1, . . . , n}
2.4 LR-Zerlegung w¨ ahlen und mit Hilfe einer Permutationsmatrix die i
∗-te Zeile mit der ersten Zeile ver- tauschen. Dazu verwenden wir P
b∈
Rn×nmit
ˆ p
ij=
1 falls i = j, i 6∈ {1, i
∗},
1 falls i = 1, j = i
∗oder i = i
∗, j = 1, 0 ansonsten
f¨ ur alle i, j ∈ {1, . . . , n},
denn diese Matrix leistet genau das Geforderte. Nun untersuchen wir die Matrix A
b:= PA.
bDa ˆ a
11= a
i∗1das betragsgr¨ oßte Element der ersten Spalte ist, kann es nur gleich null sein, wenn die gesamte Spalte gleich null ist. Das w¨ are aber ein Widerspruch zu der Regularit¨ at von A, also muss ˆ a
116= 0 gelten. Somit k¨ onnen wir wie zuvor verfahren, indem wir
A
b=
ˆ a
11A
1∗A
∗1A
∗∗
, L
b=
`
11L
∗1L
∗∗
, R
b=
r
11R
1∗R
∗∗
einf¨ uhren, wieder
`
11:= 1, r
11:= ˆ a
11= a
k1, L
∗1:= A
∗1/ˆ a
11, R
1∗:= A
1∗setzen und nach einer LR-Zerlegung der Teilmatrix
B := A
∗∗− L
∗1R
1∗∈
R(n−1)×(n−1)suchen. Im Allgemeinen braucht eine derartige Zerlegung nicht zu existieren, aber falls wir zeigen k¨ onnen, dass B regul¨ ar ist, k¨ onnten wir uns auf die Induktionsvoraussetzung berufen, um immerhin eine pivotisierte LR-Zerlegung zu finden.
Da A und P
bregul¨ ar sind, gilt dasselbe auch f¨ ur PA
b= A
b=
ˆ a
11A
1∗A
∗1A
∗∗
= `
11L
∗1I
r
11R
1∗B
, also muss der rechte Faktor
r
11R
1∗B
regul¨ ar sein, also insbesondere surjektiv. Damit muss auch B surjektiv sein, also regul¨ ar.
Nun d¨ urfen wir die Induktionsvoraussetzung anwenden, die die Existenz einer Permu- tationsmatrix P
∗∗∈
R(n−1)×(n−1)und einer LR-Zerlegung (L
∗∗, R
∗∗) mit
P
∗∗B = L
∗∗R
∗∗garantiert. Mit Hilfe dieser Matrizen k¨ onnen wir nun die gesuchte Zerlegung konstruieren:
Wir setzen P :=
1 P
∗∗
P,
bL :=
`
11P
∗∗L
∗1L
∗∗
, R :=
r
11R
1∗R
∗∗
![Abbildung 3.1: Wirkung einer Kontraktion f¨ ur ein η ∈ [1, 2], und aus Φ 0 1 (η) = 6η 5 ≥ 6 folgt](https://thumb-eu.123doks.com/thumbv2/1library_info/3946540.1534487/53.892.270.533.122.346/abbildung-wirkung-kontraktion-ur-η-φ-η-folgt.webp)