Ingenieure
Othmar Marti
Abteilung Experimentelle Physik Universität Ulm
18. November 2005
I. Vorbemerkungen 9
1. Übungsblätter und Folien 13
2. Einleitung 17
2.1. Allgemeines zur Physik . . . 17
2.2. Einheitensysteme . . . 19
2.3. Fehler . . . 21
2.4. Dimensionsanalyse . . . 22
2.5. Literatur . . . 23
II. Mechanik starrer Körper 27
3. Kinematik 29 3.1. Bewegung in einer Dimension . . . 293.1.1. Momentangeschwindigkeit und Beschleunigung . . . 30
3.2. Bewegung in zwei und drei Dimensionen . . . 33
3.2.1. Vektoren und Vektorrechnung . . . 33
3.2.2. Bsp: Wurfbewegung. . . 36
3.2.3. Gleichförmige Kreisbewegung (mit vektorieller Darstellung). 38 3.2.4. Nichtkommutativität endlicher Drehungen . . . 39
4. Dynamik, die Newtonschen Axiome 43 4.1. Trägheitsgesetz: Erstes Newtonsches Axiom . . . 43
4.2. Kraft, Masse,Impuls: Zweites Newtonsches Axiom . . . 44
4.2.1. Masse (m) . . . 44
4.2.2. Kraft (F) . . . 45
4.2.3. Arten von Kräften . . . 46
4.2.4. Beispiele zur Lösung von Bewegungsproblemen. . . 47
4.3. Anwendungen der Newtonschen Axiome . . . 50
4.3.1. Reibung . . . 50
4.3.2. d'Alembert'sches Prinzip . . . 54
4.3.3. Bewegung mehrerer miteinander verbundener Körper . . . . 55
4.3.4. Kräfte in bewegten Bezugssystemen . . . 57
4.3.5. Numerische Methoden . . . 60
4.4. Arbeit,Energie,Leistung . . . 61
4.4.1. Arbeit und Energie bei konstanter Kraft, kinetische Energie 61 4.4.2. Arbeit und Energie bei veränderlicher Kraft . . . 63
4.4.3. Allgemeine Formulierung der Arbeit bei 3 Dimensionen . . . 65
4.4.4. Potentielle Energie . . . 67
4.4.5. Energieerhaltungssatz . . . 74
4.4.6. Verallgemeinerter Energiesatz . . . 77
4.4.7. Leistung . . . 77
4.5. Teilchensysteme und Impulserhaltung . . . 79
4.5.1. Massenmittelpunkt . . . 79
4.5.2. Impulserhaltung. . . 81
4.5.3. Massenmittelpunkt als Bezugssystem . . . 82
4.5.4. Kinetische Energie eines Teilchensystems . . . 83
4.5.5. Stösse in einer Dimension . . . 84
4.5.6. Stösse in drei Dimensionen . . . 86
4.5.7. Kraftstoss . . . 88
4.5.8. Rückstossantriebe . . . 89
4.6. Drehbewegungen . . . 90
4.6.1. Winkel, Winkelgeschwindigkeit und Winkelbeschleunigung . 90 4.6.2. Drehmoment und Trägheitsmoment . . . 91
4.6.3. Kinetische Energie der Drehbewegung. . . 94
4.6.4. Berechnung der Trägheitsmomente . . . 94
4.6.5. Drehimpuls und Drehimpulserhaltung . . . 96
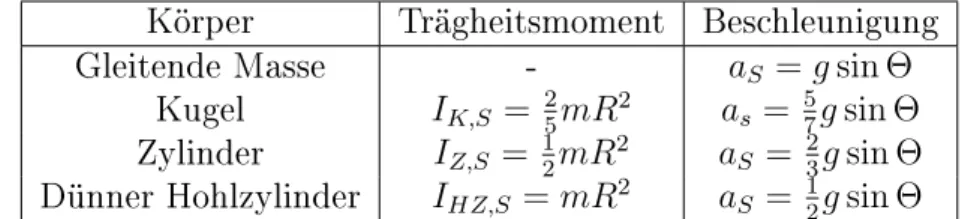
4.6.6. Rollende Körper . . . 98
4.6.7. Vektorcharakter von Drehgrössen . . . 101
4.6.8. Drehungen um beliebige Achsen: Trägheitstensor . . . 104
4.6.9. Kreiselbewegung . . . 105
4.7. Statische Gleichgewichte von starren Körpern . . . 107
4.7.1. Schwerpunkt. . . 107
4.7.2. Kräftepaare . . . 109
4.7.3. Stabilität des Gleichgewichts . . . 110
4.8. Schwerkraft oder Gravitation . . . 111
4.8.1. Keplersche Gesetze . . . 111
4.8.2. Newtonsches Gravitationsgesetz . . . 112
4.8.3. Schwere und träge Masse . . . 117
4.8.4. Raumfahrt . . . 118
4.8.5. Potentielle Energie, Gesamtenergie und Umlaufbahnen . . . 118
III. Mechanik deformierbarer fester Körper 121
5. Skalare Elastomechanik 125
5.1. Dehnung und Kompression . . . 125
5.2. Scherung . . . 126
5.3. Verdrillung eines Drahtes . . . 127
5.4. Biegung . . . 128
5.5. Beziehung zwischen den elastischen Konstanten . . . 131
5.6. Anelastisches Verhalten . . . 132
5.7. Elastomechanik anisotroper Körper . . . 133
IV. Spezielle Relativitätstheorie 137
6. Bezugssysteme 141 6.1. Michelson-Versuch . . . 1416.2. Die Einsteinschen Postulate . . . 142
6.3. Punktereignisse . . . 143
6.4. Rückdatierung . . . 144
7. Relativistische Mechanik 147 7.1. Relativität der Gleichzeitigkeit . . . 147
7.1.1. Massstabsvergleich . . . 150
7.1.2. Uhrenvergleich . . . 151
7.1.3. Der transversale relativistische Dopplereekt . . . 153
7.1.4. Addition der Geschwindigkeiten . . . 154
7.1.5. Messung der Beschleunigung . . . 156
7.1.6. Bewegte Masse . . . 157
7.1.7. Masse-Energie-Äquivalenz . . . 160
7.2. Lorentz-Transformation. . . 167
7.2.1. Vergleich der Lorentz-Transformation mit der Galilei-Transformation169
V. Schwingungen und Wellen 171
8. Schwingungen 173 8.1. Harmonische Schwingungen . . . 1738.1.1. Harmonische Schwingungen und Kreisbewegung . . . 175
8.1.2. Energiebilanz bei harmonischen Schwingungen . . . 176
8.1.3. Feder-Masse-System im Schwerefeld . . . 177
8.1.4. Pendel im Schwerefeld . . . 179
8.1.5. Bewegung in der Nähe von Gleichgewichtspunkten . . . 182
8.2. Gedämpfte Schwingung . . . 183
8.2.1. Güte des schwingungsfähigen Systems. . . 184
8.3. Erzwungene (gedämpfte) Schwingung und Resonanz . . . 185
8.4. Überlagerung von Schwingungen . . . 188
8.4.1. Schwingungen in unterschiedliche Richtungen . . . 189
8.4.2. Schwingungen gleicher Richtung und Frequenz, aber unter-
schiedlicher Amplitude . . . 189
8.4.3. Schwingungen gleicher Richtung, aber leicht unterschiedli- cher Frequenz . . . 190
8.4.4. Fouriertransformation . . . 191
8.5. Gekoppelte Schwingungen . . . 194
8.6. Verallgemeinerung: Fundamental- oder Eigenschwingungen . . . 198
9. Wellen 201 9.1. Wellen in 1 Dimension . . . 201
9.1.1. Wellenberge . . . 201
9.1.2. Ausbreitungsgeschwindigkeit . . . 205
9.1.3. Harmonische Wellen . . . 206
9.1.4. Energieübertrag bei Wellen . . . 207
9.1.5. Superposition und Interferenz harmonischer Wellen . . . 208
9.2. Wellen in 2 und mehr Dimensionen . . . 210
9.2.1. Ebene Wellen . . . 210
9.2.2. Kugelwellen . . . 211
9.2.3. Interferenz am Beispiel von Wasserwellen . . . 212
9.2.4. Beugung am Beispiel von Wasserwellen . . . 216
10.Optische Phänomene 221 10.1. Polarisation . . . 221
10.1.1. Polarisation durch Absorption . . . 221
10.1.2. Polarisation durch Streuung . . . 223
10.1.3. Polarisation durch Reexion . . . 223
10.2. Beugung . . . 225
10.3. Absorption, Dispersion und Streuung . . . 225
10.3.1. Absorption . . . 225
10.3.2. Dispersion und Kommunikation . . . 226
10.3.3. Streuung . . . 229
10.4. Welle-Teilchen-Dualismus . . . 231
VI. Geometrische Optik 235
11.Reexion und Brechung 239 11.1. Lichtstrahlen . . . 23911.2. Reexion . . . 239
11.3. Brechung . . . 241
11.4. Totalreexion und optische Kommunikation . . . 242
11.5. Prismen . . . 242
12.Optische Instrumente 245
12.1. Spiegel . . . 245
12.2. Linsen . . . 247
12.2.1. Brechung an Kugelächen . . . 247
12.2.2. Abbildungsmassstab . . . 248
12.2.3. Dünne Linsen . . . 248
12.2.4. Dicke Linsen. . . 249
12.3. Lupe . . . 250
12.4. Mikroskop . . . 250
12.5. Kollimationsoptik für Laserdioden . . . 251
12.6. Beamer . . . 251
VII.Anhang 253
13.Dierentiation und Integration 255 13.1. Dierentiationsregeln . . . 25513.2. Dierentiation einfacher Funktionen . . . 256
13.3. Taylorreihe und Reihen . . . 257
13.4. Einige Reihen . . . 258
14.Rechnen mit Integralen 259 14.1. Unbestimmte Integrale . . . 260
15.Berechnungen in ebenen schiefwinkligen Dreiecken 263 16.Simulation von Photonenstatistiken 265 16.1. Delphi-Programm . . . 265
16.2. Maple 7 -Programm . . . 266
17.Korrekturen 269
Index 269
Vorbemerkungen
Mitteilungen
• Prüfungen sind, gemäss Studienordnungen, studienbegleitend. Nach Semes- terende wird eine Klausur geschrieben. Diese zählt zur Vordiplomsnote.
• Am 19. Dezember 2001 wird während der Vorlesungszeit eine unverbindli- che Probeklausur geschrieben. Themen der Probeklausur werden die Teile I bis III sein. Diese Probeklausur soll Ihnen helfen, sich an Klausuren zu gewöhnen.
• Während den Übungsstunden werden Aufgaben unter Aufsicht und Anlei- tung des Assistenten gelöst.
• Zusätzlich gibt es Hausaufgaben, die von Assistenten korrigiert werden.
• Die Zulassung zur Klausur wird erteilt, wenn Sie an mindestens 13 Übungs- stunden teilgenommen haben und wenn Sie mindestens 80% der Hausauf- gaben (vollständig oder teilweise gelöst) abgegeben haben. Diese Zahlen re- duzieren sich, wenn Sie aus Gründen, die Sie nicht zu vertreten haben (mit Nachweis!), nicht in der Lage waren die geforderten Leistungen zu erbringen.
• Am 12.2. 2002 gibt es eine Faschingsvorlesung.
• Klausur zur Vorlesung statt.
Fragestunde zur Klausur: 25. 2. 2002, 10:00 H2 (voraussichtlich) Fragestunde zur Klausur: 4. 3. 2002, 10:00 H2 (voraussichtlich) Datum: 7. 3. 2002
Uhrzeit: 9:00 bis 11:00 Ort: 43.2.101/104
Hilfsmittel: Taschenrechner Anmeldung: bis 28. 2. 2002
Aufgabenblatt und Lösungen (HTML)1 oder(PDF)2 Resultate3
Aufgabenblatt und Lösungen der Nachklausur(HTML)4 oder(PDF)5 Resultate der Nachklausur6
• Kontakte:
1Ueb/klausur/index.html
2Ueb/klausur/klausur.pdf
3resultat.htm
4Ueb/nklausur/index.html
5Ueb/nklausur/nachklausur.pdf
6resultatnk.htm
Vorlesung Prof. Dr. sc. nat/ETH Zürich Othmar Marti, N25,541, othmar.marti@physik.uni-ulm.de7, Tel. 23011
Vorlesungsassistenz Prof. Dr. Martin Pietralla, martin.pietralla@physik.uni-ulm.de8
Übungsgruppen Manuel Gonçalves, manuel.goncalves@physik.uni-ulm.de9
Charly Imhof, charly.imhof@physik.uni-ulm.de10
Holger Schieferdecker, holger.schieferdecker@physik.uni-ulm.de11
7mailto:othmar.marti@phys ik.uni-ulm.de
8mailto:martin.pietra lla@physik.uni-ulm.de
9mailto:manuel.goncal ves@physik.uni-ulm.de
10mailto:charly.imhof@phys ik.uni-ulm.de
11mailto:holger.s chieferdecker@physik.uni-ulm.de
Übungsblätter
• Übungsblatt 1 vom 16. 10. 2001 (HTML oderPDF)
• Übungsblatt 2 vom 23. 10. 2001 (HTML oderPDF)
• Übungsblatt 3 vom 30. 10. 2001 (HTML oderPDF)
• Übungsblatt 4 vom 06. 11. 2001 (HTML oderPDF)
• Übungsblatt 5 vom 13. 11. 2001 (HTML oderPDF)
• Übungsblatt 6 vom 20. 11. 2001 (HTML oderPDF)
• Übungsblatt 7 vom 27. 11. 2001 (HTML oderPDF)
• Übungsblatt 8 vom 04. 12. 2001 (HTML oderPDF)
• Übungsblatt 9 vom 11. 12. 2001 (HTML oderPDF)
• Übungsblatt 10 vom 18. 12. 2001 (HTML oderPDF)
• Probeklausur vom 19. 12. 2001 (HTML)1 oder(PDF)2
• Übungsblatt 11 vom 8. 1. 2002 (HTML oder PDF)
• Übungsblatt 12 vom 15. 1. 2002 (HTML oderPDF)
• Übungsblatt 13 vom 22. 1. 2002 (HTML oderPDF)
• Übungsblatt 14 vom 29. 1. 2002 (HTML oderPDF)
• Übungsblatt 15 vom 5. 2. 2002 (HTML oder PDF)
• Übungsblatt 16 vom 12. 2. 2002 (HTML oderPDF)
• Klausur vom 7. 3. 2002(HTML)3 oder(PDF)4
• Nachklausur vom 12. 4. 2002 (HTML)5 oder (PDF)6
1Ueb/ue0/index.html
2Ueb/ue0/uebungsblatt0.pdf
3Ueb/klausur/index.html
4Ueb/klausur/klausur.pdf
5Ueb/nklausur/index.html
6Ueb/nklausur/nachklausur.pdf
Folien
• Folien zur Vorlesung am 16. 10. 2001 PDF
• Folien zur Vorlesung am 17. 10. 2001 PDF
• Folien zur Vorlesung am 23. 10. 2001 PDF
• Folien zur Vorlesung am 24. 10. 2001 PDF
• Folien zur Vorlesung am 30. 10. 2001 PDF
• Folien zur Vorlesung am 31. 10. 2001 PDF
• Folien zur Vorlesung am 06. 11. 2001 PDF
• Folien zur Vorlesung am 07. 11. 2001 PDF
• Folien zur Vorlesung am 13. 11. 2001 PDF
• Folien zur Vorlesung am 14. 11. 2001 PDF
• Folien zur Vorlesung am 20. 11. 2001 PDF
• Folien zur Vorlesung am 21. 11. 2001 PDF
• Folien zur Vorlesung am 27. 11. 2001 PDF
• Folien zur Vorlesung am 28. 11. 2001 PDF
• Folien zur Vorlesung am 04. 12. 2001 PDF
• Folien zur Vorlesung am 05. 12. 2001 PDF
• Folien zur Vorlesung am 11. 12. 2001 PDF
• Folien zur Vorlesung am 12. 12. 2001 PDF
• Folien zur Vorlesung am 18. 12. 2001 PDF
• Folien zur Vorlesung am 19. 12. 2001 PDF
• Folien zur Vorlesung am 08. 01. 2002 PDF
• Folien zur Vorlesung am 09. 01. 2002 PDF
• Folien zur Vorlesung am 15. 01. 2002 PDF
• Folien zur Vorlesung am 22. 01. 2002 PDF
• Folien zur Vorlesung am 29. 01. 2002 PDF
• Folien zur Vorlesung am 30. 01. 2002 PDF
• Folien zur Vorlesung am 05. 02. 2002 PDF
• Folien zur Vorlesung am 06. 02. 2002 PDF
• Folien zur Vorlesung am 13. 02. 2002 PDF
Übungsblätter und Folien werden in der Regel am Vortrag der Vorlesung zu- gänglich gemacht_.
Eine wunderbare Website zum Aufarbeiten Ihres Wissens ist Hyperphysics1 von R. Nave. Ergänzend gibt es vom gleichen Autor auch Hypermath2.
2.1. Allgemeines zur Physik
Dieser Sto wurde am 16.10.2001 behandelt Materialien:
• Übungsblatt 1 vom 16. 10. 2001 (HTML oderPDF)
• Folien zur Vorlesung am 16. 10. 2001 PDF
Beziehungen zwischen den Naturwissenschaften
• Messbare und berechenbare Grössen
• Kräfte, Energien
• Quantenphänomene (Laserdiode, Transistor)
1http://hyperphysics.phy-astr.gsu.edu/hbase/hph.html
2http://hyperphysics.phy-astr.gsu.edu/hbase/hmat.html#hmath
Grössenordnungen: Siehe auch Film: Grössenordnungen
Strecke m
Protonenradius 10−15
Atomradius 10−10
Virusdurchmesser, Gate-Dimension eines Transistors 10−7 Riesenamöbe, kleinste Si-Release-Strukturen 10−4
Walnuss 10−2
Mensch 100
Höchster Berg 104
Erddurchmesser 107
Sonnendurchmesser 109
Abstand Erde-Sonne 1011
Durchmesser Sonnensystem 1013
Abstand von α-Centauri 1016
Durchmesser Milchstrasse 1021
Durchmesser sichtbares Universum 1026
Masse kg
Elektron 10−30
Proton 10−27
Aminosäure 10−25 Hämoglobin 10−22 Grippevirus 10−19 Riesenamöbe 10−8 Regentropfen 10−6
Ameise 10−2
Mensch 102
Re 6/6 oder E101 105
Pyramide 1010
Erde 1024
Sonne 1030
Milchstrasse 1041 Universum 1052
Zeitintervall s
Licht durchquert einen Atomkern 10−23
Elementarprozesse einer chemischen Reaktion 10−16 Schwingungsperiode des sichtbaren Lichtes, kürzeste Pulse 10−15 Schwingungsperiode von Mikrowellen 10−10
Halbwertszeit Myon 10−6
Schwingungsperiode höchster hörbarer Töne 10−4
Zeit zwischen zwei Herzschlägen 100
Halbwertszeit des freien Neutrons, Unterrichtsstunde 103
Dauer der Erdumdrehung 105
Umlaufszeit der Erde um die Sonne 107
Lebensdauer Mensch 109
Halbwertszeit239-Plutonium 1012
Lebensdauer einer Gebirgskette 1015
Halbwertszeit Uran 1016
Alter der Erde 1017
Alter des Universums 1018
2.2. Einheitensysteme
Dieser Sto wurde am 16.10.2001 behandelt (Siehe Tipler, Physik[Tip94, 1]) (Siehe Gerthsen, Physik[GV95, 1])
Wir rechnen in unserer Vorlesung ausschliesslich mit dem gesetzlichen Einhei- tensystem: SI.
s Sekunde, Zeiteinheit. Deniert mit der Frequenz des Überganges zwischen zwei Hyperfeinniveaus des133Cäsium-Isotops. Diese Frequenz ist9019206310770Hz. m Meter, Längeneinheit. Abgeleitete Grundeinheit, deniert mit der Sekunde
und der Lichtgeschwindigkeit im Vakuum c= 29907290458 ms.
kg Kilogramm, Masse-Einheit (nicht Gewicht). Deniert mit dem Urkilogramm in Sèvres. Dies ist die am schlechtesten bekannte Grundeinheit.
K Kelvin, Temperatur A Ampère, Stromstärke mol Mol, Stomenge cd Candela, Lichtstärke
Faktor Vorsilbe Abkürzung Faktor Vorsilbe Abkürzung
1018 Exa E 10−18 Atto a
1015 Peta P 10−15 Femto f
1012 Tera T 10−12 Piko p
109 Giga G 10−9 Nano n
106 Mega M 10−6 Mikro µ
103 Kilo k 10−3 Milli m
102 Hekto h 10−2 Zenti c
101 Deka da 10−1 Dezi d
Grösse SI-Einheit Symbol
Länge Meter m
Zeit Sekunde s
Masse Kilogramm kg
Fläche Quadratmeter m2
Volumen Kubikmeter m3
Frequenz Hertz Hz =s−1 =f rac1s
Geschwindigkeit Meter/Sekunde m s−1 = ms Beschleunigung Meter / Quadratse-
kunde m s−2 = ms2
Kraft Newton N =kg m s−2 = m kgs2
Energie, Arbeit,
Wärmemenge Joule J =N m=kg m2 s−2kg ms2 2
Druck, Ener-
giedichte oder
Joule/Kubikmeter Pascal P a=N m−2 =J m−3 = kgms2
Leistung Watt W =J s−1 = kg ms3 2
Dichte Kilogramm / Kubik-
meter kg m−3 = mkg3
Temperatur Kelvin K
Stromstärke Ampère A
Ladung Coulomb C=A s
Stromdichte Ampère / Quadrat-
meter A m−2 = mA2
Spannung Volt V =J C−1 = kg ms3A2
Widerstand Ohm Ω =V A−1 = kg ms3A22
Kapazität Farad F =C V−1 = kg ss4a22
elektrische Feldstär-
ke Volt/Meter V m−1 = kg ms3A
magnetische Feld-
stärke Ampère/Meter A m−1
magnetische Induk-
tion Tesla T =V s m−2 = A skg2
Induktivität Henry H =V s A−1 = kg ms2A22
Lichtstärke Candela cd
Energiedosis Gray Gy =J kg−1 = ms22
Aktivität Becquerel Bq=s−1 = 1s
Stomenge Mol mol
2.3. Fehler
Dieser Sto wurde am 16.10.2001 behandelt (Siehe Tipler, Physik[Tip94, 3])
Jede Messung ist fehlerbehaftet
Beispiel in Vorlesung: Messung der Geschwindigkeit Es gibt drei Fehlertypen:
Grobe Fehler Entstehen durch Unachtsamkeit, mangelnde Kenntnis, usw.
Systematische Fehler Können prinzipiell bestimmt und auch nachträglich, bei korrekt geführtem Laborjournal, korrigiert werden. Sie treten immer in glei- cher Weise auf.
Beispiel: Voltmeter mit abgelaufener Kalibrierfrist.
Zufällige Fehler Sie sind bei jeder Wiederholung einer Messung anders. Zu den zufälligen Fehlern gehören auch die Rundungsfehler bei digitalen Messgerä- ten.
Arithmetisches Mittel hxi= 1 n
Xn
i=1
xi = 1
n(x1+x2+. . .+xi+. . .+xn) (2.1) Standardabweichung
sx = vu ut 1
n−1 Xn
i=1
(xi− hxi)2 (2.2) Zufällige Fehler löschen sich teilweise aus, also ist
shxi= sx
√n = vu ut 1
(n−1)n Xn
i=1
(xi− hxi)2 (2.3) Besteht ein Experiment aus mehreren Teilmessungen, muss das Fehlerfort- panzungsgesetz nach Gauss angewandt werden. Sei
Y =Y (X1, X −2, . . . , Xm) (2.4) Dann ist der resultierende Fehler
sY = vu ut
Xm
j=1
µ ∂V
∂XjsXj
¶2
(2.5) Beispielsweise ist der Druck bei einem zylinderförmigen Kolben durch p = πrF2
gegeben. Der fehler ist also
sp =
sµ 1 πr2sF
¶2 +
µ−2F πr3 sr
¶2
(2.6)
2.4. Dimensionsanalyse
Dieser Sto wurde am 16.10.2001 behandelt (Siehe Tipler, Physik[Tip94, 5]) (Siehe Gerthsen, Physik[GV95, 2])
Die Dimension zeigt, wie eine Grösse von den Basisgrössen, z.B. Länge, Zeit und Masse abhängt. Wie man nicht Äpfel mit Birnen verrechnen kann, müssen bei einer physikalischen Gleichung die Dimensionen auf beiden Seiten übereinstimmen.
Die Dimensionsanalyse ist ein mächtiges Werkzeug, um zu testen, ob man richtig gerechnet haben könnte3.
Beispiel
x=x0+v0t+ 1
2a0t2 (2.7)
Gleichung (2.7) ist richtig, wenn man wie unten für die Länge L und für die Zeit T einsetzt.
L= [X] =L= [x0] = L
TT = [v0t] = L
T2T2 = [1
2a0t2] (2.8) Beispiel: Schwingungsdauer eines Pendels
Die Schwingungsdauer t hängt von der Länge `, der Masse m und der Erdbe- schleunigung g ab. Also ist
t ≈mαlβgγ (2.9)
oder
T1 =MαLβ µ L
T2
¶γ
=Lβ+γMαT−2γ (2.10) Der Exponentenvergleich ergibt α = 0, γ = −12 und damit β = 12. Wir erraten, dass die Schwingungsdauer eines Pendels wie
t≈ s
l
g (2.11)
ist, das korrekte Resultat, wenn man von Vorfaktoren absieht.
3Man kann damit beweisen, dass man einen Fehler gemacht hat, nicht aber dass man richtig gerechnet hat. Dies ist analog zur Neunerprobe
2.5. Literatur
Die Vorlesung orientiert sich an den Werken von Tipler[Tip94], Physik, und Gerthsen/Vogel[GV95], Physik. Zum Aufarbeiten des gelernten Stoes (nicht als Einsteigerliteratur) kann
auch Kneubühls[Kne74] Repetitorium der Physik empfohlen werden. Mathema- tische Probleme und Formeln sind sehr schön im Bronstein[BSMM00] zusammen- gefasst. Diese Datei gibt es auch als PDF-Datei4 und als Web-Site5.
4PhyIng1.pdf
5http://wwwex.physik.uni-ulm.de/lehre/PhysIng1/
[BSMM00] I.N. Bron²tein, K.A. Semendjajew, G. Musiol, and H. Mühlig. Ta- schenbuch der Mathematik. Verlag Harri Deutsch, 2000.
[GV95] Ch. Gerthsen and H. Vogel. Physik. Springer Verlag, 18. auage edi- tion, 1995.
[Kne74] F. Kneubühl. Repetitorium der Physik. Teubner Verlag, 1974.
[Tip94] Paul A. Tipler. Physik. Spektrum Verlag, 1994.
Mechanik starrer Körper
Dieser Sto wurde am 16.10.2001 behandelt (Siehe Tipler, Physik[Tip94, 19]) (Siehe Gerthsen, Physik[GV95, 9])
Die Kinematik befasst sich mit der Frage nach dem Wie einer Bewegung, nicht nach dem Warum.
3.1. Bewegung in einer Dimension
Dieser Sto wurde am 16.10.2001 behandelt
(Siehe Tipler, Physik[Tip94, 19]) (Siehe Gerthsen, Physik[GV95, 3]) Begrie:
Geschwindig- keit, Durch- schnittsge- schwindigkeit Aus dem Alltagsleben:
Durchschnittsgeschwindigkeit= Gesamtstrecke
Gesamtweg (3.1)
Physik: Mathematische Formulierung Gesamtweg:
∆x=x2−x1 (3.2)
Gesamtzeit:
∆t=t2−t1 (3.3)
Wir schreiben für die Durchschnittsgeschwindigkeit
< v >= ∆x
∆t = x2−x1
t2−t1 (3.4)
Was ist die Durchschnittsgeschwindigkeit bei drei Strecken(x2−x1),(x3−x2),(x4− x3)hintereinander, die in den Zeiten(t2−t1),(t3−t2),(t4−t3)durchfahren werden?
< v >= ∆x
∆t = (x2−x1) + (x3−x2) + (x4−x3)
(t2−t1) + (t3−t2) + (t4−t3) = x4−x1
t4−t1 (3.5) Dieser Sto wurde am 17.10.2001 behandelt
Materialien:
• Übungsblatt 1 vom 16. 10. 2001 (HTML oderPDF)
• Folien zur Vorlesung am 17. 10. 2001 PDF
Was bedeutet das, wenn wir (18. Jahrhundert) von Ulm nach Buchhorn (103 km, Durlesbach (-36 km (wir wandern zurück) , 9h) wandern?
Ulm, Durlesbach und Buchhorn liegen auf einem Kreissegment, also auf einer Linie. Also ist die Durchschnittsgeschwindigkeit
< v >= 103km−36km
35h+ 9h = 67km
44h ≈1.5km
h (3.6)
Der Sprachgebrauch im Alltag sagt:
< v >= 103km+ 36km
35h+ 9h = 139km
44h ≈3.2km
h (3.7)
Es wurde mit den Beträgen gerechnet.
Wir verwenden ausschliesslich die physikalische Denition nach Gleichung (3.5) und Gleichung (3.6) !
Graphische Darstellung einer linearen Bewegung
3.1.1. Momentangeschwindigkeit und Beschleunigung
Dieser Sto wurde am 17.10.2001 behandelt (Siehe Tipler, Physik[Tip94, 19]) (Siehe Gerthsen, Physik[GV95, 10]) Momentan-
geschwindig-
keit Momentangeschwindigkeit ⇔ Tangente ⇔ Ableitung v = lim
∆t→0
∆x
∆v = dv
dt = ˙x (3.8)
Graphische Darstellung einer linearen Bewegung Beispiel
Sei x(t) = Atn+Btm. Dann ist v(t) = dx
dt = d
dt(Atn+Btm) = nAtn−1+mBtm−1 (3.9)
Beschleunigung ⇐⇒ Änderung der Momentangeschwindigkeit Beschleunigung Mittlere Beschleunigung
< a >= ∆v
∆t (3.10)
Momentanbeschleunigung
a(t) = lim
∆t→0
∆v
∆t = dv(t)
dt (3.11)
Beschleunigung und Ort
a(t) = dv(t)
dt = ddx(t)dt
dt = d2x(t)
dt2 = ¨x (3.12)
Wie kommt man von einer bekannten Beschleunigung zum Ort?=⇒Integration Integration
Graphische Darstellung einer Geschwindigkeit und Integration
dv
dt =a (3.13)
Wir multiplizieren die obige Gleichung mitdt
dv=adt (3.14)
Nun integrieren wir auf beiden Seiten von der Zeit t= 01 bis t Zt
0
dv = Zt
0
adt (3.15)
und erhalten
v(t)−v(0) = a×t|t0 =a×t (3.16) oder mitv(0) =v0
v(t) =v0+a×t (3.17) Dabei ist die Anfangsbedingung mit eingerechnet.
Weg:
dv
dt =v =v0 +a×t (3.18)
Wir integrieren auf beiden Seiten Zt
0
dx= Zt
0
(v0+a×t)dt (3.19)
und erhalten
x(t)−x(0) = (v0×t+ 1
2a×t2)
¯¯
¯¯
t
0
=v0×t+ 1
2a×t2 (3.20) oder mitx(0) =x0
x(t) =x0 +v0×t+1
2a×t2 (3.21)
Schauen Sie in einem Mathematikbuch oder (Siehe Tipler, Physik[Tip94, 30]) nach, wie die Integration durchgeführt wird
Materialien
• Bremsweg bei konstanter Beschleunigung2
1Sollte der Zeitwert für den Anfangswert des Integrationsintervalls nicht null sein, verschieben wir die Zeitskala um den entsprechenden Wert
2http://webphysics.ph.msstate.edu/jc/library/2-6/index.html
Gleichung (3.18) kann verstanden werden, in dem man realisiert, dass die Ge- schwindigkeit sich vonv0 nachv0+atändert, so dass< v >= v0+(v20+at) =v0+12at2 ist.Gleichungen bei konstanter Beschleunigung
v = v0+at x = x0+v0t+ 1
2at2 (3.22)
Durchschnittsgeschwindigkeit
< v >= ∆x
∆t = (x0+v0t+ 12at2)−x0
t = 1
2(v0 +v) (3.23) Wenn die Endgeschwindigkeit ve = v0 +at ist, erhält man aus ∆x = x(t) = v0t+ 12at2 mit t = ve−va 0
∆x=v0ve−v0
a + 1 2a
µve−v0
a
¶2
= v0ve
a − v20 2 + v2e
2a − vev0
a + v02 a
ve2 =v20 + 2a∆x (3.24)
3.2. Bewegung in zwei und drei Dimensionen
Dieser Sto wurde am 17.10.2001 behandelt (Siehe Tipler, Physik[Tip94, 43]) (Siehe Gerthsen, Physik[GV95, 9])
3.2.1. Vektoren und Vektorrechnung
Dieser Sto wurde am 17.10.2001 behandelt
(Siehe Tipler, Physik[Tip94, 47]) Vektoren
Materialien
• Graphische Vektoraddition3 Graphische Addition
Vektoraddition
3http://webphysics.ph.msstate.edu/jc/library/3-2a/index.html
Dieser Sto wurde am 23.10.2001 behandelt Materialien
Folien zur Vorlesung am 23. 10. 2001 PDF
Übungsblatt 2 vom 23. 10. 2001 (HTML oder PDF) Komponentenschreibweise
A= (A1,A2) = µ A1
A2
¶
(3.25) Länge
A= q
A21+A22 (3.26)
Winkel mit der x-Achse
cos(Θ) = Ax
A (3.27)
Einheitsvektoren ex in x-Richtung,ey in y-Richtung, ez-in z-Richtung.
A =A=Axex+Ayey+Azez (3.28) Addition
A+B = (Axex+Ayey +Azez) + (Bxex+Byey+Bzez)
= (Ax+Bx)ex+ (Ay+By)ey + (Az+Bz)ez (3.29) Geschwindig-
keiten Geschwindigkeitsvektor
r =xex+yey+zez (3.30)
Mittlere Geschwindigkeit
<v >= ∆r
∆t (3.31)
Momentangeschwindigkeit
v= lim
∆t→0
∆r
∆t = dr
dt = ˙r (3.32)
Ableitung in Komponenten
v = lim
∆t→0
∆r
∆t = lim
∆t→0
∆xex+ ∆yey+ ∆zez
∆t
= lim
∆t→0
∆x
∆tex+ lim
∆t→0
∆y
∆tey+ lim
∆t→0
∆z
∆tez (3.33)
also
v= dx
dtex+ dy
dtey+ dz
dtez (3.34)
Analog zur obigen Rechnung erhält man die Beschleunigung aus der Geschwin- digkeit.
Mittlere Beschleunigung
<a>= ∆v
∆t (3.35)
Momentanbeschleunigung
a = lim
∆t→0
∆v
∆t = dv
dt = ˙v = ¨r (3.36)
oder auch
a = dvx
dt ex+ dvy
dt ey +dvz
dt ez (3.37)
Relativgeschwindigkeit
vM ensch gegen Erde =vBus gegen Erde+vM ensch gegen Bus (3.38)
Materialien
• Relativbewegungen4
• Kombination von Drehbewegung und Translation5
3.2.2. Bsp: Wurfbewegung
Dieser Sto wurde am 23.10.2001 behandelt
(Siehe Tipler, Physik[Tip94, 53])
Wurfbewegungen sind zusammengesetzte Bewegungen (Beispiel aus (Siehe Tipler, Physik[Tip94, 53]) )
Siehe auchSimulation von Walter Fendt6 Uni Heidelberg7 oderUni Würzburg8.
4http://webphysics.ph.msstate.edu/jc/library/3-5/index.html
5http://webphysics.ph.msstate.edu/jc/library/5-1/index.html
6http://home.a-city.de/walter.fendt/phd/wurf.htm
7http://physik1.physik.uni-heidelberg.de/vrlsg/data/detail/2-2-6.htm
8http://didaktik.physik.uni-wuerzburg.de/ pkrahmer/home/java1.html
Bild aus (Siehe Tipler, Physik[Tip94, 55]) . Rot ist die horizontale, grün die vertikale Position markiert. Die horizontalen Abstände sind, innerhalb meiner Zeichengenauigkeit, gleich, deuten also auf eine konstante Geschwindigkeit hin.
Beschleunigungen
Sei x(t= 0) = 0,y(t= 0) = 0, vx(t = 0) =vx,0 und vy(t= 0) =vy,0
ay(t) = −g
ax(t) = 0 (3.39)
Geschwindigkeiten
vy(t) = −g∗t+vy,0
vx(t) = vx,0 (3.40)
Ort
y(t) = −1
2g∗t2+vy,0∗t
x(t) = vx,0∗t (3.41)
Diese Bewegung ist parabelförmig, wie man leicht sieht, wenn man x(t) nach t auöst und einsetzt.
y(x) =−1 2d
µ x vx,0
¶2 + vy,0
vx,0x (3.42)
3.2.3. Gleichförmige Kreisbewegung (mit vektorieller Darstellung)
Dieser Sto wurde am 23.10.2001 behandelt (Siehe Tipler, Physik[Tip94, 61]) (Siehe Gerthsen, Physik[GV95, 16]) Siehe auch Uni Würzburg9 oder vonWalter Fendt10.
Kreisförmige Bewegungen gibt es
• Fahrt durch eine Kurve mit Fahrrad, Auto, Schlittschuhen ...
• Zentrifuge
• Satelliten
Schematische Darstellung eines Satelliten
Der Satellit |v| = v bewegt sich im Kreis mit dem Radius r. In kleinen Zeiten t bewegt er sich um vt in der ursprünglichen Richtung weiter. Er fällt um h. Der Satz des Pythagoras angewandt auf das rechtwinklige Dreieck ergibt
r2+ (vt)2 = (r+h)2 =r2+ 2rh+h2 (3.43) Kleine Zeiten bedeutet, dass h¿r ist. Also kann
F allgesetz, W eg und Beschleunigung (vt)2 ≈2rh =⇒ h= 12vr2t2
z }| {
= 1
2at2 (3.44)
geschrieben werden.
Zentripetal- beschleuni-
gung Vergleich
9http://didaktik.physik.uni-wuerzburg.de/ pkrahmer/home/gravrot.html#rot
10http://home.a-city.de/walter.fendt/phd/karussell.htm
az = v2
r (3.45)
Wennr(t) = (rcos(ωt),rsin(ωt),0)ist ( ω heisst Kreisfrequenz und wird benö- tigt, um aus der Zeit eine als Argument der Winkelfunktion benötigte dimensions- lose Grösse zu erzeugen), dann ist
v(t) = d
dtr(t) = (−rωsin(ωt), rωcos(ωt),0) (3.46) und
az(t) = d
dtv(t) = d2
dt2r(t) = (−rω2cos(ωt),−rω2sin(ωt),0) =−ω2r(t) (3.47)
Zentripetalbewegung. Die durchr1,r2 und durchv1,v2aufgespannten Dreiecke sind ähnlich
Materialien
• Masse auf Kreisbahn mit Gegengewicht11
3.2.4. Nichtkommutativität endlicher Drehungen
Materialien
Folien zur Vorlesung am 24. 10. 2001 PDF
Dieser Sto wurde am 24.10.2001 behandelt
11http://webphysics.ph.msstate.edu/jc/library/5-2a/index.html
Beispiel für die Nichtvertauschbarkeit endlicher Drehungen
Die mathematische Darstellung eine Drehung um die z-Achse kann wie folgt hergeleitet werden:
Jeder Vektor A =
Ax
Ay Az
kann als A = Axex +Ayey +Azez geschrieben
werden. Dabei ist ex =
1 0 0
,ey =
0 1 0
, und ez =
0 0 1
. Die Funktion Rz(A, α) soll den VektorA um die z-Achse drehen.
Wenn der Vektor Aum die z-Achse gedreht wird, dann ist der gedrehte Vektor Rz(A, α) = A0 =
f(Ax,Ay, α) g(Ax,Ay, α)
Az
. Die z-Komponente wird dabei nicht verän- dert, die x- und die y-Komponenten sind Funktionen der ursprünglichen x- und y-Komponenten sowie des Winkels.
In der Abbildung links wird gezeigt, wie ex transformiert wird. Rechts wirdey transformiert.
Wir erhalten: Rz(ex,α) = Rz
1 0 0
,α
=
cosα sinα
0
.
Rz(ey,α) = Rz
0 1 0
,α
=
−sinα cosα
0
.
Rz(ex,α) =Rz
0 0 1
,α
=
0 0 1
.
Mit Rz(A,α) = Rz(Axex +Ayey + Azez,α) = AxRz(ex,α) + AyRz(ey, α) +
AzRz(ez, α) = Axcosα−Aysinα Axsinα+Aycosα
Az
. Diese letztere Gleichung kann als
Rz(A,α) =A0 =
Axcosα−Aysinα Axsinα+Aycosα
Az
=
cosα −sinα 0 sinα cosα 0
0 0 1
Ax
Ay Az
(3.48) Damit kann eine Drehung um die Z-Achse kann als Matrix
Dz(α) =
cos(α) −sin(α) 0 sin(α) cos(α) 0
0 0 1
(3.49)
Durch formales Rotieren der Koordinaten z →y,y →x und x→z bekommt man die Drehmatrix für eine Drehung um die y-Achse
Dy(α) =
cos(α) 0 sin(α)
0 1 0
−sin(α) 0 cos(α)
(3.50)
Weiteres formales Rotieren der Koordinaten z → y, y →x und x → z liefert die Drehmatrix für eine Drehung um die x-Achse
Dx(α) =
1 0 0 0 cos(α) −sin(α) 0 sin(α) cos(α)
(3.51)
Die Drehung um die y-Achse um −π/2 (=90◦) und dann um die x-Achse um
−π/2 wird mit Matrizen als
r0 = Dx(−π/2)Dy(−π/2)r
=
1 0 0 0 0 1 0 −1 0
0 0 −1 0 1 0 1 0 0
1 0 0
=
0 0 −1
1 0 0
0 −1 0
1 0 0
=
0 1 0
(3.52)
Werden die Drehungen in umgekehrter Reihenfolge durchgeführt, so ist
r0 = Dx(−π/2)Dy(−π/2)r
=
0 0 −1 0 1 0 1 0 0
1 0 0 0 0 1 0 −1 0
1 0 0
=
0 −1 0 0 0 1 1 0 0
1 0 0
=
0 0 1
(3.53)
Grosse Drehungen können nicht vertauscht werden. Es gibt viele
Eigenschaften in der Physik, die nicht kommutativ sind
Axiome
Dieser Sto wurde am 24.10.2001 behandelt (Siehe Tipler, Physik[Tip94, 71]) (Siehe Gerthsen, Physik[GV95, 12])
4.1. Trägheitsgesetz: Erstes Newtonsches Axiom
Dieser Sto wurde am 24.10.2001 behandelt (Siehe Tipler, Physik[Tip94, 72])
Alltägliche Beobachtung: alle Bewegung stoppt ⇒ Aristoteles nimmt dies als Naturgesetz an.
Newton argumentiert: Reibungskräfte stoppen die Bewegung. Wenn es keine Reibungskräfte gäbe würde sich der Bewegungszustand nicht ändern.
Erstes Newtonsches Axiom:
Wenn F = P
i
F
i= 0 ist, ändert ein Körper seinen Bewe- gungszustand nicht, d.h. er bleibt in Ruhe oder bewegt sich mit konstanter Geschwindigkeit.
1. Newtonsches Axiom , Trägheitsgesetz
Bsp: Galileis Gesetz (Siehe Tipler, Physik[Tip94, 72])
Bezugssystem Wir wählen einen Koordinatenursprung0und ein Koordinatensys- tem und schreiben alle Gleichungen in Bezug auf dieses Koordinatensystem auf.
Bezugssysteme können
• x in Bezug zur Erde sein
• x in Bezug zu einem Gefährt sein (Bus, Zug, Flugzeug,. . .)
• x in Bezug zur Milchstrasse sein
• . . .
Ein Bezugssystem, in dem das erste Newtonsche Axiom gilt, heisstInertialsys- tem.Gibt es Inertialsysteme?
4.2. Kraft, Masse,Impuls: Zweites Newtonsches Axiom
Dieser Sto wurde am 24.10.2001 behandelt (Siehe Tipler, Physik[Tip94, 74]) (Siehe Gerthsen, Physik[GV95, 12])
das zweite Newtonsche Axiom beantwortet die Frage: Was ist die Ursache der Bewegung?
Newtons Formulierung:
Die Änderung des Impulses (P = mv) eines Körpers ist gleich der auf den Körper wirkenden Kraft
F = dp
dt = d(mv)
dt (4.1)
Bernoullis Formulierung
aDie Beschleunigung eines Körpers ist umgekehrt proportional zu seiner Masse und proportional zur resultierenden Kraft a =
F m
aDiese Formulierung ist ein Spezialfall!
Das zweite Newtonsche Axiom wird auch Aktionsgesetzgenannt.
Bernoulli m muss konstant sein (analog zur Durchschnittsgeschwindigkeit) Newton analog zur Momentangeschwindigkeitmit
m =const
F = d(mv)dt = dmdtv+mdvdt = mdvdt =ma
Einheit der Kraft: 1N = 1
mkgs2Materialien
• Experiment mit Luftkissenbahn und Fallgewicht1
4.2.1. Masse ( m )
Dieser Sto wurde am 24.10.2001 behandelt Die Masse im zweiten Newtonschen Axiom ist die träge Masse.
Massenbestimmung mit dem 2. Newtonschen Axiom
1http://webphysics.ph.msstate.edu/jc/library/4-7a/index.html
• gleiche Kraft auf zwei Massen m1 und m2
• F =m1a1 =m2a2 ⇒ mm1
2 = aa2
1
Masse: Einheit kg, deniert mit Urkilogramm in Sèvres ⇒ Sekundärnormale, Eichung!
4.2.2. Kraft ( F )
Dieser Sto wurde am 24.10.2001 behandelt Einheit der Kraft:N = m kgs2 Name: Newton
Kraft und Bahnkurve r(t)bei konstanter Masse F =ma =mdv
dt =md2r
dt2 (4.2)
d.h. die Kraft hängt von der Krümmung der Bahnkurve r(t)ab.
Impuls: Denition:p=mv Einheit mkgs =Ns
Die Weiterentwicklung der Physik nach Newton (u.a. Quantenmechanik) hat gezeigt, dass der Begri des Impulses p universell verwendbar ist, nicht aber m und v.
Beantworten Sie die Fragen in (Siehe Tipler, Physik[Tip94, 78]) . 4.2.2.1. Drittes Newtonsches Axiom
Dieser Sto wurde am 24.10.2001 behandelt (Siehe Tipler, Physik[Tip94, 80])
Drittes Newtonsches Axiom:
Kräfte treten immer paarweise auf. Wenn vom Körper A aus auf den Körper B die Kraft F ausgeübt wird, so wird vom Körper B die Kraft −F auf den Körper A ausgeübt.
Diese Reaktionskraft ist also gleich gross wie die ursprüngliche Kraft, aber entge-
gengesetzt gerichtet.
Beispiele: Gewicht auf Tisch
Während das erste wie auch das zweite Newtonsche Axiom auch in der Quanten- mechanik und in der Relativitätstheorie gelten, versagt in diesen moderneren physi-
kalischen Theorien das dritte Newtonsche Axiom.
Bsp: Wirkt die Kraft instantan?
4.2.2.2. Kraft durch Gewicht und schwere Masse
Dieser Sto wurde am 24.10.2001 behandelt (Siehe Tipler, Physik[Tip94, 78]) (Siehe Gerthsen, Physik[GV95, 46]) Jede Masse wird von jeder anderen Masse angezogen (Gravitation).
Die Erdanziehung auf eine Masse m ist
FG=mg (4.3)
|g|=g = 9.81ms2s ist die Fallbeschleunigung auf Meereshöhe. ms ist die schwere Masse.
Anwendung: Massenbestimmung durch Kraftvergleich.
Wenn an einem Ort Fg,1 =Fg,2 ist, so ist auch m1 =m2. Wenn an einem Ort Fg,1 =αFg,2 ist, so ist auch m1 =αm2.
4.2.3. Arten von Kräften
Dieser Sto wurde am 30.10.2001 behandelt (Siehe Tipler, Physik[Tip94, 82])
Materialien
Folien zur Vorlesung am 30. 10. 2001 PDF
Übungsblatt 3 vom 30. 10. 2001 (HTML oder PDF) Fundamentale Kräfte
1. Gravitationswechselwirkung
2. elektromagnetische Wechselwirkung
3. starke Wechselwirkung (Kräfte zwischen Kernbausteinen wie Protonen oder Neutronen
4. Schwache Wechselwirkung (Verantwortlich z.B. für den Zerfall der freien Neu- tronen).
Kontaktkräfte
Die Kraft ist proportional zur Auslenkung F =−kx, analog zur Feder. Anwen- dung: Federwaage.
4.2.4. Beispiele zur Lösung von Bewegungsproblemen
Dieser Sto wurde am 30.10.2001 behandelt
(Siehe Tipler, Physik[Tip94, 86])
FZ, FG und FN sind Kräfte auf den Körper FZ =max
Reaktionskraft aufFZ: FZ0 =−FZ
3. Newtonsches Axiom: Kraft durch ziehende Hand = - Kraft auf Körper Wenn die Masse des FadensmF ist, ist
F −FZ0 =mfax
Masse des Fadens vernachlässigbar: F −FZ0 ≈0
Fadenspannung
Bei vernachlässigbarer Masse ist |FZ| überall im Faden gleich. FZ heisst die Zugkraft.
Beispiel: schiefe Ebene
Schiefe Ebene
FG,x=FGsin Θ =mgcos Θ FG,y =−FGcos Θ =−mgcos Θ In unserem Koordinatensystem ist ay null.
PFy =FN −mgcos Θ = 0 Also: FN =mgcos Θ
Die x-Komponente ist P
x =mgsin Θ =max oder ax =gsin Θ
Beispiel: Gewicht an einer Schnur
Links: Konstruktion mit Kräfteparallelogramm, rechts vergrösserte Ansicht.
Gegeben ist: Fg, α und β
Mit dem Sinussatz für beliebige Dreiecke (Seitenlänge dividiert durch den Sinus des Gegenwinkels ist konstant)
Fg
sin(α+β) = F1
sin(π/2−β) = F2
sin(π/2−α) (4.4) umgeformt
F1 = Fg cos(β) sin(α+β) F2 = Fg cos(α)
sin(α+β) (4.5)
Schlussfolgerung: Wenn α und β gegen null gehen, dann werden die Kräfte F1 und F2 sehr gross. Sie können leicht die maximal zulässige Seilspannung überstei- gen.
Beispiel: Zentrifugalregulator (Erndung von James Watt)
Schematische Darstellung des Wattschen Zentrifugalregulators. Die Masse m wird durch die Gravitation und die Seilspannung beschleunigt. Die resultie- rende Kraft ist die Zentripetalkraft FZ.
Zentripetalkraft
FZ =mω2r=FZsin Θ (4.6) und
FZcos Θ =mg=FG (4.7) Zusammen
FZsin Θ
FZcos Θ = tan Θ = mω2r mg = r
gω2 (4.8)
also ist für kleineΘ
ω = rg
r tan Θ≈ rgΘ
r (4.9)
Der Wattsche Regulator ist also ein Drehzahlmesser.
4.3. Anwendungen der Newtonschen Axiome
Dieser Sto wurde am 30.10.2001 behandelt (Siehe Gerthsen, Physik[GV95, 80])
Wir setzen voraus, dass wir alle Kräfte kennen: dann können wir die Beschleu- nigung und damit auch die bewegung eines Teilchens bestimmen.
4.3.1. Reibung
Dieser Sto wurde am 30.10.2001 behandelt (Siehe Tipler, Physik[Tip94, 99]) (Siehe Gerthsen, Physik[GV95, 40])
Erfahrung: wenn man versucht, ein Möbelstück zu verschieben, muss man eine Kraft ausüben.
Reibungskräfte versuchen, Bewegungen zu verhindern oder zu dämpfen
4.3.1.1. Haftreibung
Beobachtung: Wenn ein Körper mit der Kraft FN, der Normalkraft, auf einen anderen Körper gedrückt wird, wird mindestens eine Kraft
F ≥FH =µHFN (4.10)
benötigt, um den Körper in Bewegung zu setzen.FH heisst Haftreibungskraft.
µH ist der Haftreibungskoezient.
Umgekehrt gilt die Aussage, dass wenn die zur Auageäche parallele Kraft F < FH ist, bewegt sich der Körper nicht. Die Haftreibungskraft, englisch: stiction, ist eines der grössten Probleme in der Mikrosystemtechnik (englisch Micro-Electro- Mechanical-Systems, MEMS) und in der Festplattenindustrie.
4.3.1.2. Gleitreibung
Wenn ein Körper gleitet, dann gilt die Beziehung
FG =µGFN (4.11)
wobei FG dieGleitreibungskraft und µG der Gleitreibungskoezient ist.
Schematische Darstellung der Haft- und Gleitreibungskraft als Funktion der angelegten, parallel zur Auage wirkenden Kraft.
Schematisch verhalten sich Haftreibungskraft und Gleitreibungskraft wie in der Abbildung gezeigt.
4.3.1.2.1. Eigenschaften
• µG≤µH
• µG hängt von der Relativgeschwindigkeit der Oberächen ab.FG ist im Ge- schwindigkeitsbereich von 1cm/s bis einigen m/s näherungsweise konstant.
Ausserhalb dieses Geschwindigkeitsbereiches nimmt die Gleitreibungskraft zu.
• µG und µH hängen von der Struktur der Oberächen und ihrer Zusammen- setzung ab, nicht aber von der scheinbaren makroskopischen Kontaktäche AM ab.
• µG und µH hängen von der wahren Kontaktäche AW ¿AM ab sowie vom Kontaktdruck in dieser Fläche. (Deshalb ist die Reibung zwischen ultraa- chen Endmassen extrem gross.)
4.3.1.2.2. Schlussfolgerung Die Reibung wird von temporären Bindungen zwi- schen den Atomen der Oberächen der einzelnen Reibpartnern gebildet. Zusätzlich und meistens auch dominierend ist jedoch die zur Abscherung mikroskopischer Er- höhungen (Asperities in englisch) benötigten Kräfte.
Kräfte auf einen Körper auf einer schiefen Ebene. Die x-Achse sei parallel zur Auage, die y-Achse senkrecht dazu.
XFy =FN −mgcosα= 0 (4.12)
XFx=mgsinα−FH = 0 (4.13)
Oder
FH =mgsinα = FN
cosαsinα=FN tanα (4.14) Der Haftreibungskoezient ist gleich dem Tangens des Winkels, bei dem der Körper zu gleiten beginnt.
µH = tanαmax (4.15)
Gleitreibung wird durch Messung der Beschleunigung bestimmt.
Fx =mgsinα−µGFG =max (4.16)
ax =g(sinα−µgcosα) (4.17) oder
µg = tanα− ax
gcosα (4.18)