Research Collection
Doctoral Thesis
Festigkeitsberechnung von Kegelschalen mit linear veränderlicher Wandstärke
Author(s):
Honegger, Emil Publication Date:
1919
Permanent Link:
https://doi.org/10.3929/ethz-a-000098890
Rights / License:
In Copyright - Non-Commercial Use Permitted
This page was generated automatically upon download from the ETH Zurich Research Collection. For more information please consult the Terms of use.
ETH Library
FESTIGKEITSBERECHNUNG VON KEGELSCHALEN MIT
LINEAR VERÄNDERLICHER
WANDSTÄRKE
VONDER
EIDGENÖSSISCHEN TECHNISCHEN HOCHSCHULE
INZÜRICH
ZURERLANGUNG DER
WÜRDE EINES DOKTORS DER
TECHNISCHEN WISSENSCHAFTEN
GENEHMIGTE
PROMOTIONSARBEIT
VORGELEGT VON
EMIL HONEGGER,
DIPL. MASCH.-ING.AUS HINWIL
(ZÜRICH)
REFERENT: HERR PROF. DR. E. MEISSNER KORREFERENT: HERR PROF. DR. A. STODOLA
219
LUZERN1919 BUCHDRUCKEREIKELLER & Co.
Leer
-Vide
-Empty
Meinem Vater
Leer
-Vide
-Empty
INHALTSVERZEICHNIS.
Seite
Einleitung 7
Bezeichnungen 9
I.Abschnitt: Mathematischer Teil.
§ 1. Ableitung der Grundgleichungen 12
§ 2. Spezialfälle, welche eineVereinfachung desmathematischen Problems
gestatten 18
§ 3. Die Integration der
homogenen Differentialgleichung
für den Kegelmit linear veränderlicher Wandstärke 21
§ 4. Diepartikulären Integraleder nicht
homogenen Differentialgleichungen
33II. Abschnitt: Diskussion der praktischen Aufgabe.
§ 5. Die Randbedingungen 39
§ 6. Die elementaren Belastungsfälle 41
§ 7. Erläuterung der Berechnungsweise im Falle zusammengesetzter Be¬
lastung 44
§ 8. Die elastischen Verschiebungen 48
III.Abschnitt: Numerische Berechnungen.
§ 9. Nach aussen verstärkter Kegel: a = 6° 50
§ 10. Nach aussen verjüngter Kegel: a = 6° 59
§ 11. Nach aussen verjungte ebene Scheibe: a = 0° . . 62
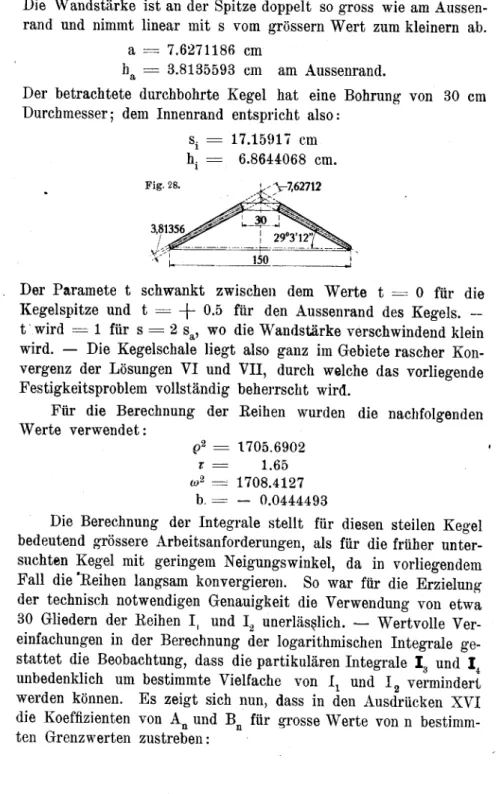
§ 12. Nach aussen verjüngter Kegel: a = 29° 3' 12" 71
§ 13. Graphische Integration der Grundgleichungen nach der Methode von
Prof. Meissner 75
§ 14. Besprechung der Resultate und Vergleich mit Kegelschalen unver¬
änderlicher Wandstärke 80
A. Kegel von a = 6" Neigungswinkel 81 B. Kegel von a = 29° 3' 12" Neigungswinkel 88 C. Vergleich der nach aussen linear verjüngten Kegelschalen von
a — 6° und a = 29° 3' 12" 91
Leer
-Vide
-Empty
1
EINLEITUNG.
Diese,
aufAnregung
von Prof. Meissner vorgenommene Unter¬suchung
dertechnischwichtigen Kegelschalen
mit linear veränder¬licher Wandstärke soll ein relativ
bequemes, praktisch
verwend¬bares Verfahren für die
Berechnung
des elastischen Verhaltens dieser Schalen erläutern. — Dieerste,
von Prof.Stodola1)
an¬gegebene Lösung
beschränkt sich aufKegel
konstanter Wandstärke und erfordert dieIntegration
einerDifierentialgleichung
fünfterOrdnung.
Prof. Meissner hatgezeigt2),
dass die Difierential¬gleichung
vierterOrdnung,
auf derenIntegration
das Problem beizweckmässiger
Wahl der Unbekanntenhinausläuft,
in zweiDifferentialgleichungen
zweiterOrdnung zerfällt;
dieLösungen
dieser beiden
Gleichungen
sindkonjugiert komplexe
Grössen.Für den
Kegel
konstanter Wandstärke hat Dr.Dubois3)
dieVerwendbarkeit der Methode ausführlich
dargetan;
dieLösung
wird alsdann durch Besselsche Funktionengegeben.
— Im vor¬liegenden Fall,
wo die Wandstärke linear mit dem Abstand vonder
Kegelspitze
sichändert,
führt dieFestigkeitsuntersuchung
aufeine
hypergeometrische Differentialgleichung,
derenIntegrale
durchkonvergierende
Reihen berechnet werden können.Die
gewählten Bezeichnungen
schliessen sich genau an die von Prof. Meissner verwendetenan4),
denn dieseverbürgen
diegrösstmögliche
Einfachheit derDarstellung.
Dazu weisen aber dieseBezeichnungen
in'
vorliegendem
Fall veränderlicher Wand¬stärke noch einen
weitern,
wesentlichen Vorteil auf: siegeben
dievon einem
Schalenquerschnitt übertragenen
Kräfte und. Momente in ihrer totalen Grösse undzeigen
in übersichtlicherWeise,
wie') A.Stodola: Die Dampfturbinen (vierte Auflage, Seite 597).
2) E. Meissner:DasElastizitätsproblemfür dünneSchalen.Physikal.Zeitschr.
14.Jahrgang. Seite 343. — Ueber Elastizität und Festigkeit dünner Schalen Vierteljahrschrift der Naturforschenden Gesellschaft Zürich. 1915, Seite 23.
s) Dubois: Festigkeit der
Kegelschale.
Diss. Zürich, 1917.4) In Uebereinstimmungmit: Love, Lehrbuch der Elastizität. Deutschvon A.Timpe.
Leipzig
1907.jeder
Teil der dünnen Schalemittragen
hilft. ImGegensatz
hie-zu würden die
spezifischen Spannungen,
die nicht nur mit den aus¬geübten
Kräften undMomenten,
sondern auch noch mit der ört¬lichen Schalenstärke veränderlich
sind,
einschwerleserliches,
un¬deutliches Bild der Verhältnisse
geben.
Es sei noch
erwähnt,
dass ein grosser Teil der numerischenBerechnungen
mit einem 50 cmlangen
Eechenschieberausgeführt
wurde. Dies erwies sich als genau genug, in Anbetracht der Ver¬
nachlässigungen,
die in der Theorie dünner Schalengemacht
wer¬den. — Wo grössere
Genauigkeit notwendig
war, wurde mit acht¬stelligen Logarithmen gearbeitet.
Herrn Prof. Meissner bin ich für die
Unterstützung
bei derEntstehung
dieser Arbeit zu grossem Dankverpflichtet.
AuchHerrn Dr. Dubois möchte ich für manchen
guten
Eat meinen Dankaussprechen.
BEZEICHNUNGEN.
a
Komplenient
zum halbenSpitzenwinkel
desKegels,
auf dieMittelfläche
bezogen.
s
Länge
derErzeugenden,
von derSpitze
aus, in der Mittelfläche gemessen,h Dicke der
Schale,
normal zur Mittelfläche.cp Breitenwinkel.
Fig.
1.Fig.l
Das Element der
Kegelschale,
auf welches die Grund¬gleichungen bezogen
werdensollen,
seibegrenzt
durch:die beiden
Kegelmantelflächen,
welche die Schale selbstbegrenzen
;zwei
Meridianebenen,
die um den WinkelHcp
voneinander abstehen;zwei
Kegelflächen,
die die Mittelfläche der untersuchtenKegelschale
im Abstand s und(s-f-ds)
von derSpitze
normal durchsetzen und mit ihr koaxial sind.
Durch den
geometrischen Mittelpunkt
dieses Elementes solleinrechtwinkliges Koordinatensystem
sogelegt werden,
dass: die-|-
x-Achse mit derMittelflächen-Erzeugenden
zu¬sammenfällt,
im Sinne zunehmender s;die
-\-
z-Acbse normal auf derKegelmittelfläche
steht undnach dem Innern des
Kegels zeigt;
die
-f- y-Achse
in dieTangente
an den Parallelkreis fällt und mit den x- und z-Achsen einrechtshändiges System
x, y, z bildet.
a%
Normalspannung
in derEichtung -|-
x, im Abstände z vonder
Mittelfläche, zusammengesetzt
aus:axo Normalspannung
in derMittelfläche,
von zunabhängig.
°xz
von zabhängiger
Teil vonax.
o = a -4- a
X xo I xz
ebenso: a = er 4- u
y yo I yz
r
Schubspannung,
wirkend in der koaxialenNormalkegelfläche.
Tj Normalkraft,
aufeine,
dieKegelmittelfläche
in einem Parallel¬kreis normal durchsetzendeFläche
wirkend,
von derim Parallel¬kreis gemessenen
Länge
1 ; also:Tj
=oxo h.f)
ebensogilt:
T2
= a h. demnach ist:T2
Normalkraft auf einenMeridianschnitt,
von der im Meridian gemessenenLänge
1.Gl Biegungsmoment,
um diey-Achse
drehend; Fläche wie fürT,
; also:Gi
=6hS°«»«
ebensogilt:
"2 (J
°yz
maxN Eesultierende
Querkraft;
Fläche wie beiT, (Fig. 2a).
N =
j
rdz£ Deformationskomponente
inKichtung -|-
x.3
Neigungswinkel
derTangente
an die deformierteErzeugende
der Schalenmittelfläche gegen die x-Achse im undeformierten Zustand.
Fig.
2.dx ds
') Eigentlich: Tj =
I
<rxdz ( \; aber z darf neben p vernach-«-^ \ P /
lässigt
werden.- 11 —
exo
Spezifische Dehnung
in derx-Richtung,
in der Mittelfläche.sx
Entsprechend,
im Abstände z von der Mittelfläche.e
Spezifische Dehnung
in derMittelfläche,
unde „
„im
Abstand z vondieser,
in der y-Richtung.
Fig.2
X Aeussere
Belastung
pro Flächeneinheit derKegelmittelfläche,
in der
-{- x-Richtung
wirkend.Z
Desgleichen,
in der-\- z-Richtung.
E Elastizitätsmodul:
2.1X106.
v Poissonsche Konstante: 0<3.
Einheiten:
kg,
cm, sec.Mathematischer Teil.
Eine
Kegelschale,
deren Wandstärkebeliebig
mitdem Abstandvon der
Spitze
sichändert,
sei inbezug
aufihre Achsesymmetrisch
belastet. Dashomogene
undisotrope
Materialgehorche
dem HookeschenGesetz;
es werde also an keiner Stelle über dieProportionalitätsgrenze,
hinausbeansprucht.
Infolge
dervollständigen Symmetrie
werden auf einen Meridian¬schnitt nur
Normalspannungen
wirken und es werdenPunkte,
dievor der Deformation in einer
Meridianebene lagen,
auch nach der Deformation in dieserliegen.
Wir setzen voraus, dass die
Schalenstärke
klein sei im Ver¬hältnis zu ihren
übrigen Abmessungen,
und dass ferner die De¬formationen klein seien im Verhältnis zu den
Scbalenabmessungen.
Dies erlaubt uns, die
Normalspannungen,
welche auf derKegel¬
mittelflächenormal
stehen,
zuvernachlässigen
undanzunehmen,
dass eine Normale zurKegelmittelfläche
nach der Deformation normal auf der deformiertenSchalenmittelfiäche
stehe.Im mathematischen Teil wird vorerst die
Untersuchung
all¬gemein
fürbeliebige Veränderlichkeit
der Schalenstärke durch¬geführt. Nachträglich
werdenjene Spezialfälle herausgegriffen,
welche sich rechnerisch besonders einfachgestalten,
und von diesender
Kegel
mitlinear veränderlicherWandstärke eingehend
behandelt.§
1.Ableitung
derGrundgleichungen.
Gleichgewichts-Bedingungen.
Wird ein Element der
Kegelschale
von dieserlosgetrennt
ge¬dacht,
so kann seinGleichgewicht
dadurchungestört
erhalten an¬genommen
werden,
dass in denSchnittflächen
die früher wirkendenSpannungen
durchgleich
grosse undgleich gerichtete
äussere Kräfte ersetzt werden.Gleichzeitig
sollen die schon früher amElement
angreifenden
äusseren Kräfteweiterwirken.
— 13 —
Das
Kräftesystem,
welches auf das betrachtete Schalenelementwirkt,
setzt sichfolgendermassen
zusammen:a)
Aufeine,
in einem Meridianschnittliegende Begrenzungsfläche
wirken:
1. eine Normalkraft:
dT2
=T2ds
= hdsajo
•2. ein
Biegungsmoment:
dG2
=G2ds
=itfds oyzmax
b)
Auf eineBegrenzungsfläche,
welche im Abstand s von derKegelspitze
normal zurKegelmittelfläche
steht und dieselängs
eines Parallelkreises durchsetzt:
1. eine Normalkraft:
d
T,
=Tj
sûcp
cos« = h sàc/>
oxo . cos«2. ein
Biegungsmoment
:d
Gx
=Gl
s&<p
cos« = -A\%sdcp
oxz max• cos«
3. eine
Querkraft:
d N =
[j"
tdz]
sAçp
cos« = N sà.cp
cos«c)
Die äussereBelastung
desKegels
sei durch ihrebeiden,
aufdieFlächeneinheitder
Kegelmittelfläche bezogenen Komponenten
nach den 4- x- und 4-
z-Eichtungen gegeben.
— Nach Voraus¬setzung wird die dritte
Komponente,
nach + y, zu Null. — Alsdann wirken auf das Schalenelement:Xs cos«
dcp
ds Z scos«Acp
dsEin
Kräftesystem genügt,
falls es imGleichgewicht ist,
den6
Gleichgewichtsbedingungen.
Von diesen werden bei dem hierbetrachteten
Kräftesystem
3 identischbefriedigt, infolge
der voraus¬gesetzten Symmetrie
derBelastung
; es sind dies dieKomponenten¬
gleichung
nach dery-Richtung
und dieMomentengleichungen
umdie x- und die z-Achsen. — Die 3
übrigen Gleichgewichts¬
bedingungen
nehmenfolgende
Gestalt an(Fig. 2a):
1.
Koniponentengleichung
nach derx-Richtung:
0 = d
(s
cos«dcp
hoxo)
— h ff ds cos«dcp -f-
X s cosadcp
dswelche,
durch ds •dtp dividiert,
auchgeschrieben
werdenkann:
d
(sTj)
—T8 -f-
s X = 0. 12.
Komponentengleichung
nach derz-Richtung:
0 = d
(s
cos«dcp N) -f-
s cos«dcp
ds Z-j-
h ds adcp
sin«welche,
nach Division durchtga>ds<dcp
auchgeschrieben
werden kann:
^(sN) + T2 tg« +
sZ3.
Momentengleichung
um diey-Achse:
0.
d
(y
h2 s cos«dcp
oxz max)
^-h2 ds er m„ cos« dcp 4-6 yz max ^ i
yz
max
— S COS«
dçp
N ds = 0.Nach Division mit cosa •
dçp
• dsd
ds
(s Gx)
_G2
— sN 0.— 15 —
Deformationszustand.
Die
Formänderung
wird injedem
Punkte durch die beidenVerschiebungskomponenten £
und£ gegeben.
Der
Krümmungsradius
g der deformiertenErzeugenden hängt
mit demNeigungswinkel
3 derTangente
an diese durch die Be¬ziehung
zusammen:1 d* däf s. .
P ds ds2 s *
Die
spezifischen Dehnungen
derKegelmittelfläche
sindgegeben
durch:
e =
Ü
= i". f = *~ ?**"
xo ds - yo s
Daraus
ergibt
sich für dieDehnung
einer Faser im Abstandz von der Mittelebene:z
p
[sCOSa -j- Çcosa — (f
—(-
z) sina — zsintfcosa] — [scosa - z sina)y S COSa — z sina
wo das erste Glied im Zähler den normalen Achsenabstand nach der
Deformation,
das zweite vor derDeformation, angibt.
— WirdimNenner dieses Ausdrucksz
gegenüber
svernachlässigt
und sin ^durch
tg
3" =£
•ersetzt,
sogeht
er über in:e _ i — ? tgo Lt.— % — i tgg 1 3, c
y s s * s s
Beziehungen zwischen Spannungen und Dehnungen.
Für einen ebenen
Spannungszustand gelten
nach dem Hooke'-schen Gesetz die
Beziehungen:
a = , 5 (ê -1- v e); a = , 5 (e -4- v e
)
•Da nach
Voraussetzung
dieNormalspannungen
azvernachlässigt werden,
besitzen dieseGleichungen
imvorliegenden
FalleGültig¬
keit und
ergeben
nachzweckmässiger Umformung:
6
T — Eh /c. I v ' - S ^
• T — Eh
I*
— ; ^a_I_ «c.\
Ti —
r^i^
+ v —g—)'i2-r^z^l—s
r^ )7
Aufstellung der
Differentialgleichungen.
Wird aus den beiden
Komponentengleichungen (1)
und(2)
die KraftT2 eliminiert,
soergeben
sie:(sTj)'
sin«-f- (s N)*
cosa-f-
s X sin«-)-
s Z cos«= 0.Durch die Schreibweise:
F(s)
=) [X
sin«-}-
Zcos«]
s ds A0
geht
dieseGleichung
in die Form über:s
Tj
sin«-f
s N cosa = —F(s).
8Diese
Gleichung sagt,
dass die zur Achse desKegels parallelen Kräfte,
die an der Schaleangreifen,
falls diese durch einen den Parallelkreis s enthaltendenNonnalkegel abgeschnitten wird,
im
Gleichgewicht
sind. — DieseGleichung,
welcheebensogut
direkthergeleitet
werdenkann,
kann eine der beidenKomponenten¬
gleichungen ersetzen, gegenüber
denen sie densymmetrischen
Auf¬bau als Vorteil aufweist.
Die
vorliegende Aufgabe
bestehtdarin,
für einebeliebige,
dengemachten Voraussetzungen genügende Belastung
derKegelschale
dieUnbekannten;
3 Kräfte:
Tv T2, N,
2 Momente:
Gr„ G2,
2
Deformationskomponenten £
und£,
als Funktionen des Ortes zu bestimmen. — Es ist
leicht,
bei ge¬gebener
Deformation derSchale,
dieübrigen
5Unbekannten
zubestimmen,
wie aus denGleichungen (6)
und(7)
zusammen mit(2)
oder(8)
ersichtlich ist;überhaupt
sind sämtliche Unbekannten— 17 —
eindeutig feststellbar,
sobald zwei als Funktionen von s bekannt sind. Diese beiden Grundvariablen könnenbeliebig gewählt
wer¬den,
und diegrösstmögliche
Einfachheit derDifferentialgleichung gewähren
die Unbekannten:5 :
ieraus
=
£•;
!
folgt:
B = sT,
:
h2
Tx
= h3BsT2
== 2 h h- B+
h=:B"'+s
XN =
F(8)
s cos«
—
s
B
tg«
S ffxo
h B
gemäss (1)
nach
(8)
Die eine
Differentialgleichung
des Problems kann nun her¬geleitet werden,
indem in derMomentengleichung (3)
die Momente als Funktionen von •?> nach(7) geschrieben werden,
und anderseitsN
gemäss (9)
durch die Unbekannte B ersetzt wird. Die Momenten¬gleichung
nimmt dannfolgende
Gestalt an:s *••
+ (l + 3S^--f(3S^:-l)^
|=
18*5.
(1 _ *) B +^M-
(i _ ,,).E h v ' 'Eh3 cos« v '
Die zweite
Differentialgleichung
wirdgefunden,
indem dieDehnungen
durch dieSpannungen ausgedrückt
werden und dannverlangt wird,
dass die ersteren denKompatibilitätsbedingungen genügen
sollen. — Nach(5)
ist für z = 0£yo
=Uz±*&- also:£
=(£_ eyo
s)cotg«.
f*
=(ew
-£yo
- SV) GOtZa
= *• 10In dieser
Gleichung
können:£xo
= E-£(Ti
- "T.)
yo
—
E h
À (T,
- -Tl}
gesetzt werden,
wo dannT1
undT3
ihrerseits durch die in B aus¬gedrückten
Werte ersetzt werden. Auf diese Weiseergibt sich;
II
sB-+(1 +
3s£)
B-+ (s[2 + ,]hE + 2s^-l) §
=h cotga |h- v ' h ' > h2 \ Das Problem ist nun
zurückgeführt
auf dieLösung
der beidenlinearen,
simultanenDifferentialgleichungen
zweiterOrdnung (I)
und
(II),
was imallgemeinen
dadurch erreicht werdenkann,
dassman die aus der Elimination der einen Unbekannten entstandene
Differentialgleichung
vierterOrdnung integriert.
§
2.Spezialfälle,
welche eineVereinfachung
desmathematischen Problems
gestatten.
Prof.
Meissner1)
hatgezeigt,
dass für besondere Formen derKegelschale
dieDifferentialgleichung
vierterOrdnung
in zweiDifferentialgleichungen
zweiterOrdnung
zerfällt; dieseSpezialfälle
sollen nun
hergeleitet
werden.Zur
Vereinfachung
der Schreibweise seienfolgende
Abkür¬zungen
eingeführt:
L
(U)
= hcotg« [s
U»+ (1 +
3 s~)
U- —5]
Cçp _ 2 v h*
cotga
j 12 (1 —v2)D *1- E E
5P2 =
K2 + v)
h"+
3 sh-] cotg« ^
= — EDie beiden simultanen
Differentialgleichungen (I)
und(II)
schreiben sich dadurch:
E h2 sina
L
(B) +
5V B=h *-\S-è (2 +
"- ¥s) + ?
xI cotg"-
') E. Meissner: a. a.0.— 19 -
Die
vollständigen Integrale
dieserGleichungen
setzen sichzusammen aus einem
Integral
derhomogenen Differentialgleichung
und einem additiven
partikulären Integral.
Vorerst sollen dieIntegrale
derhomogenen Differentialgleichung
ermitteltwerden,
welche
Gültigkeit
haben beijeder Belastung,
abernur im besondern Falle verschwindenderspezifischer Belastungen
X und Z und Be¬lastungsfunktion
F(s)
das Problemvollständig
lösen.Obige
Glei¬chungen gehen
über in:L
(») +
cpx S =\
BL
(B) +
<p2 B =À2
SDurch Eliminieren von
B, respektive
•$:L L
(3)
+ L(gp1 3) +
cp%L(S) + (cPl
cp2 -^ À2)
5«=0 IVaL L
(B) +
L(>2B) +
<pxL(B) + (^
<p2 -lt À2)
B=0 2Es werde nun die besondere Annahme
gemacht:
L
p) + (c + f/l)
3 = 0 3worin c eine Konstante
ist,
über die nochverfügt
werden kann.Durch
Ausführung
derDifferenzialoperation
L anobiger Gleichung geht
diese über in:L L
(3) -f
L(cPl 3) |
e L(J)
= 0 4und durchEliminieren von L L
($)
und L(3)
aus denGleichungen (I), (IVa)
und(4) folgt:
[- (Vi
-c) (c + 90 + {cpx
<pa -Xx À2)]
» = 0c2
+ (SP!
-SPg)
c -X, \
= 0. 5Hierin ist alles
übrige konstant,
also muss auch konstant sein:CP\ — 9>2 = 2
k0
=[3
yh* —(2 -f ?)
h* — 2 sh-] cotg«
6 C2+
2k0
c -\ \
= 0Ci
=-k0 + VVT^,T c*
= -ko
-iWT\h
7Aus
Gleichung (6) folgt:
—
(1
—v)
h" — s h" =k0 tga.
Durch
Integration
dieserGleichung ergibt
sich für die Wandstärkeder
Kegelschale
das Gesetz:h = a
-f
b s+
e svfalls b = — jrzz~\ un(i a un(l e
Integrationskonstanten
sind.Gehorcht die Schalendicke dem Gesetz
(III),
sogeht
dieDifferenzialgleichung
vierterOrdnung (I)
über in die beidenDifferentialgleichungen
zweiterOrdnung:
L
(3) + (cx + Vx)
5 = 0 |VL
(*) 4 (c2 + *,)*
= °-Sind die beiden
vollständigen Integrale
dieser Differential¬gleichungen
ermittelt in der;Form
:~si
=Kt ^ + K2 32 \
=K, 38 + K4 *4
wo mit K die
verfügbaren Integrationskonstanten
bezeichnetsind,
so kann die zweite
abhängige
Grundvariable leicht mit Hülfe derBeziehungen (IV)
und(I') gefunden
werden:L
i\) + (cx + *>,) ^
= 0L
(^ +
cßl^
=}.t BT
cx
^
= -),x B,
V ebenso c2
$n
= —Kx Bn
Um nun auf den besondern Fall zu
kommen,
bei welchem die Schalenstärke linear mit dem Abstand von derKegelspitze
sichändert, genügt
es, im Ausdruck(III)
dieIntegrationskonstante
e = 0 zu setzen:
h = a
-f
b s. Ill'Hierdurch treten dann noch
folgende Vereinfachungen
ein: cpx = 3 v bcotg« k0
=(v
—1)
bcotg«
(p2 =
(2 -|- v)
bcotg« (1
—v)
b — —k0 tga
- 21 —
Die beiden
Differenzialgleichungen (IV)
lautennunmehr,
ausführlichgeschrieben
:h
cotg« [
s >~+ (l +
8 b^¥7)) *•-!]+
IV-+ I (1 +
2v)
bcotg«
±^(T—v)^ cotg2^—
12(1
—v*) 1
3=0.§
3. DieIntegration
derhomogenen Differentialgleichung
für denEegel
mit linear veränderlicher Wandstärke.Normalform der hypergeometrischen Differentialgleichung.
In den im
vorhergehenden Paragraphen gefundenen Gleichungen (IV),
welche im hier betrachteten FalleGültigkeit besitzen,
lassensich wesentliche
Vereinfachungen
durchfolgende
Variablen-Sub¬stitution erzielen:
s = —
^
t h = a(1
—-t)
Es werden dadurch:
A
— _A A ^
i_^! di
ds a dt ds2 ' a2 dt2
Werden dann ferner die
Abkürzungen eingeführt:
o-x = 2 v
+ y/(i
-vf
-^JIb^2 tg2«
ffj! = 2 v —
\/(l
-vf
-^ (1b7
v2)tg2«
so schreiben sich die beiden
Differentialgleichungen:
O
+ lt=î + t)
dt+ U + °i) Fct^ï)
=°d«* , , w , .,.- , ,. , , -
=0 IV
dta +
\t
—1 "Tt)
dt "I \t "T"2/
t(t-l)'Dies sind zwei
hypergeometrische Differentialgleichungen,
deren
allgemeinste
Form lautet:')
1 —a —a' . 1—y— y'\T7, , |-'oo' , r/ , aa,\ Y Y"
+ (^^+i^^)Y'
+(=^
+^+* x(x-ir
:()]) Felix Klein: „Ueber die hypergeometrische Funktion." Autographie.
Leipzig. Teubner. 1906. — Seite 46.
Durch
Vergleichen entsprechender Koeffizienten,
unter Berück¬sichtigung
der zwischen denExponenten
derhypergeometrischen Differentialgleichung geltenden Beziehung1):
«
+
a'+ /? + /?'+
r+ y'
=1,
ergeben
sich für diesefolgende
Werte:+
1 y = 0ß
=+ }
+y/y-
- 0,2 ' V 4 "i
Diese Werte beziehen sich auf die erte der
Gleichungen (IV);
um die
Exponenten
der zweitenGleichung
zuerhalten, genügt
es, in denBeziehungen ß
undß',
a{ durch u2 zuersetzen,
währenda,
«',
7 und7'
unverändert bleiben.« und «' sind die zum
singulären
Punkte t = 0gehörigen Exponenten
derhypergeometrischen Funktion,
währendß
und/?'
dem Punkte t = °° und y undy'
dem drittensingulären
Punktt =
—|—
1zugeordnet sind.2)
Integrale für die Umgebung von t = o.
Ein erstes
Integral
der erstenDifferentialgleichung (IVT")
kannohne weiteres
hingeschrieben
werden:worin2)
:^
= t • F(a1 bL
c,t)
a, =
/?+« +
7 =} + \/t
'- °'iCj = 1 — a — a'— 3
- °"i
VI
F(a, b,
c,t)
= 1+ ^t+ ^t«^±i)
(c+
1) f+
l a (a
4-
1) (a+
2) b (b+
i) (b+
2) f3 ,' 3! c (c + 1) (c
-f
2) ~T1) F.Klein: a. a. 0. Seite 43.
2) Die
folgenden
Kechnungen beziehen sich, wenn nicht anders vermerkt, immer auf die erste der Gleichungen (IV").— 23 —
Aus der
Symmetrie
derDifferenzialgleichung folgt,
dass y undf gleichberechtigt sind;
daher kann das ebenangeführte Integral
auch in einer andern Schreibweise
gegeben werden,
indem inobigen
Werten überall y durch
>''
ersetzt wird:^
= t(1
-t)2F (a,' b/ c/ t)
VTworin
V =/?+« + 7'
=| + v/f3^
C = 3
Das
Integral 3, konvergiert jedenfalls
im Innern des Einheits¬kreises,
d. h für|t]
< 1. Ob es auf dem Einheitskreise auch nochkonvergiert,
muss erst untersucht werden. DieseFrage
sollaber hier nicht weiter
verfolgt werden,
weil sie für diefolgenden zahlenmässigen Berechnungen,
wo nur raschkonvergierende
Inte¬grale
verwendet werden und 5 demnach höchstens fürjt|
< 0 • 5berechnet werden muss, ohnehin
belanglos
ist.Es sei noch
erwähnt,
dass dasgefundene Integral ^
leichtauf elementarem
Weg hergeleitet
werdenkann,
indem die Reihe:A
+
Bt+
Ct2+
D f+
Et4-f
= 3in die
Gleichung (IV") eingesetzt wird,
woraus sich das bereits bekannteKoefflzientengesetz
ohneSchwierigkeiten ergibt.
Ein
zweites,
in derUmgebung
des Punktes t = 0gültiges Integral
kanngewöhnlich
aus dem erstengefunden werden,
indem in diesem überall « und «' miteinander vertauscht werden. Auch das zweiteIntegral gestattet
zweigleichwertige Schreibweisen, je
nach dem y odery'
zurBerechnung
der Koeffizienten heran¬gezogen wird. — Im
vorliegenden
Fall würde aber:C, = 1
-|-
«' — a = — 1und es wären daher sämtliche Glieder der
irypergeometrischen
Reihe nach dem zweiten unendlich gross. Die Reihe würde ihre
Bedeutung
verlieren.Um ein zweites
Integral
zufinden,
muss dieangeführte
kri¬tische
Wirkung
derganzzahligen
Differenz:a — a' =
-f-
2umgangen
werden,
was durch einenGrenzübergang
erreicht wird. — Es sei s eine kleineZahl,
diebeliebig
klein werdensoll;
a —• «' == 2
+
* 0:' = a -- 2 -- £ : — 1 — e. 1Alsdamn werden:
--ß+
«'=
/? +
«'= l -
+
7"— a -
1
—
2 1
~~
2
-«i*
= 3+
£ —= (£
=
h
-2 —
— 2
£
2
«£
=+ \/|
—ffi
3
\
=-v/4
— °"i £cî
== 1+
«' — « = — 1 — £ = ci 4 — e.Folglich
:T—
t;1-^!-
, (a,-2--<0(V8-«). , ("1-2-e)(aj-1-e){b1-2-£)(brl
-«)4-+ ] «
Wird nun diese Eeihe
multipliziert
mit:v~' '
(aj — 2 — e) (at— 1—e) (bj -2-~<:) (bt — 1 — £) "
und
nachträglich
£ = 0gesetzt,
sogeht
sie über in das ersteIntegral 3r
— Wird also die lineare Kombinationgebildet
:.* __
|~m
(2, e) *3 -tfj
^ -
L
;J
£ = osoist $* ein zweites
Integral
dervorliegenden Differentialgleichung.
Dieses kann auch
geschrieben
werden:^n*
[
m (2, e)e»92 - i9t «J
£ =r 0.Hierin hat m
(2, a) 32
die Form:t -1-« 2! (- 1 - «) (-e)
f"
1 , (at-2-e) (bt-2-e) .]
.(a1-2-E)(a1-l-£)(b1-2-£)(b1-l-E)[
' (—1 — *)J
'i
t+1-£fl
I (ai-£)(bi-f)t
i (%-e) (axH-1-e)(a2-g)(a2+
1-*)t2
_i_
lg
"T"
L 3 (1—e) "T" 3•4•(1—f)(2—«) "" "''
J
- 25 -
Wird im zweiten Ausdruck 6 = 0
gesetzt,
sogeht
er genau in die Form-5^
über. Wird der erste Ausdruck durch s dividiert und wirdnachträglich
a = 0gesetzt,
so lautet er:t '
(«4-2) (14-1) (bi-2)
(bi -~ï) +
(ax- 1)(bj- 1)
=
E(^t) Folglich
hat man, falls der erste Ausdruck(6)
nach dem GrenzŸbergang
mitE-(t),
der zweite vor demGrenzübergang
mitrI>(s)
bezeichnet wird:5
v2
â
=[^-fL
= o+ K»
Wie ohne weiteres
ersichtlich,
wird das erste Glied nach demGrenzübergang
die Gestalt annehmen:- t
Igt
F(at b,
ctt) +
t6>'(t).
7Im Ausdruck
(7)
hat6>'(t)
die Gestalt:ö'(t)
=c,'
t+ c;
t2+ C8'
t3+ C4'
t4+
8p , __at (ai
+
1) .. .. (at+n-1)bi (bt +1). . .(bx +n-1) ftn
—
3-4
(2-f-n)-n!
«' 9
.
Y ,_l
11_\
Dieses Gesetz lässt sich am einfachsten herleiten durch
logarith¬
mische Differentiation des
allgemeinen
Gliedes der unendlichen Reihe <I>(«):
7 M (at—e)^-f1—e).,..(at-fn—1—e)(bt—e) ....ibt+n—1—e) , n
^nW— (1 - £) (2— <0 . . . . (n— e) • 3 • 4 . . . . (2+n) Nun ist:
d llg Zn(e)] _
1 d ZD(e)
de Zn(e) de
d Zn(e) 7 , s d [lg Zn(e)|
—5T- = A.00 de"
Die
Ableitung
vonlg Za(c)
nach £gibt,
nachdem e = 0gesetzt
wurde,
die Summe im Ausdruck(9)
; der vor der Summe stehende Faktor istZn(0).
—Das zweite Glied im Ausdruck
(5")
lässt sich ingleicher
Weise berechnen undergibt:
[•f]
e = 0 = * 0"W 10
0"
(t)
=C/'
t-f C/' t2+ C3" t'-|-
' 1112
n » _ ai (ai
+
1) (ai+
n-l) bt (bt+
n—1) ^3 •4 . . . . (2 + n) •n!
=q \ 3
+
v.Werden nun die
Ergebnisse (7)
und(10)
in(5") eingesetzt,
so wird:
$*2
=-tlgt.F (a, b,
Clt) +
t02 (t)
-ï-—ï2__ +
V||+
(ax - 2)(^njl^-lMbr^7!)
* *worin:
ß2 (t)
=C,
t+ C2
t2-J- C8
t3+ C4
t*+
Vilap >! f»! | 1) . , . . (at
-f
n - 1) ht . , , , (bt|
n - 1)n
—
3 . 4 . 5 . . . . . (3
-f
n) n!V f^_
+.JL
i i'„to U+"
"•" 3+
v ax+
v( b±
+
Das
vorliegende
zweiteIntegral
hätte auch in elementarer Weisehergeleitet
werdenkönnen,
durch Einsetzen der Funktion:~\ lg
t+
j+
A+
B t+
C t2+
1) t3+
E t*+
=3,
in die
Differentialgleichung (IV"). Allerdings
setzt das die Kennt¬nis der
allgemeinen
Form von32
voraus.Das
vollständige Integral
derhomogenen Differentialgleichung (IV")
lautet somit:* =
KÏ$1 + K2 V, «
wo mit K die aus den
Randbedingungen
bestimmtenIntegrations¬
konstanten bezeichnet sind. Wie schon
erwähnt,
hat dieseLösung
nur
Gültigkeit
für|t|
<1,
da sie für