Research Collection
Doctoral Thesis
Anwendung der stereographischen Projektion auf Konstruktionen im nichteuklidischen Raume
Author(s):
Mettler, Ernst Publication Date:
1916
Permanent Link:
https://doi.org/10.3929/ethz-a-000092028
Rights / License:
In Copyright - Non-Commercial Use Permitted
This page was generated automatically upon download from the ETH Zurich Research Collection. For more information please consult the Terms of use.
ETH Library
Anwendung stereographischen Projektion auf Konstruktionen im
nichteuklidischen Räume.
(5X5) ex©
Von der
Eidgenössischen Technischen Hochschule in Zürich
zur Erlangung der
Würde eines Doktors der Mathematik
genehmigtePromotionsarbeit
vorgelegt von
Ernst Mettler,
aus Stäfa.
Referent: Herr Prof. Dr. M. GROSSMANN.
Korreferent: Herr Prof. Dr. L. KOLLROS.
165
ZÜRICH a 1916.
Diss.-Druckerei Gebr. Leemann & Co.
Stockerstr. 64.
Leer
-Vide
-Empty
LIEBEN ELTERN
AUS DANKBARKEIT GEWIDMET.
Leer
-Vide
-Empty
Der Zweck der
vorliegenden
Arbeit sollsein,
die fundamen¬talen, projektiven
Konstruktionenanzugeben,
welche sich auf die beiden nichteuklidischen Räumebeziehen.1)
Die
Festlegung
derMaßgeometrie
im Räume und damit dieGrundlage
für das Konstruierengeschieht
durch die Annahme der absoluten Fläche. Zu diesem Zwecke bilden wir den nichteukli¬dischen Raum auf den euklidischen ab. In diesem wählen wir nun
als das Bild des absoluten Gebildes des
hyperbolischen
Raumes der Einfachheit halber eine reelleKugel
undrepräsentieren
dieimaginäre
absolute Fläche deselliptischen
Raumes durch eine solche. DieseFestsetzung auferlegt jedoch
derAllgemeinheit
keineEinschränkungen,
da dieKugel
für eineallgemeine
el¬liptische
Fläche zweiten Grades des nichteuklidischen Raumesangesehen
werden kann. Für unsere Konstruktionen ist die absolute Fläche alsgegeben
zubetrachten;
wir operieren mit ihrenPunkten,
als wären eseigentliche
Punkte des nichteukli¬dischen Raumes. Sobaldaber auf
(diese
Art und Weise die Methoden der Konstruktionen entwickeltsind,
so lassen sie sich auch mitLeichtigkeit
auf den Fallübertragen,
wo die absolute Fläche nurindirekt
gegeben ist.2)
Für die
Durchführung
der Konstruktionen benützen wir diestcreographische Abbildung
der im euklidischen Räume*) Für die entsprechenden Aufgaben in der hyperbolischen und elliptischen
Ebene vgl.: Großmann, M., Die fundamentalen Konstruktionen der nicht¬
euklidischen Geometrie (Programm der Thurgauischen Kantonsschule, Frauen¬
feld 1904).
2) Groß mann, M., Die Zentralprojektion in der absoluten Geometrie (Verhandlungen des V. Internationalen Mathematikerkongresses in Cambridge, 1912).
— 6 —
als absolute Fläche des nichteuklidischen Raumes angenommenen
Kugel
auf die Bildebene.Eine Ebene trifft die
Kugel
in einemKreise,
der sich be¬kanntlich durch diese
Abbildung
wieder als Kreisprojiziert.
Durch die Annahme eines Kreises in der Bildebene ist dann auch rück¬wärts eine Ebene bestimmt;durch zwei
Kreise,
als ihrePotenzlinie,
eineGerade,
und durch dreiKreise,
als ihrgemeinsamer
Potenz¬punkt,
ein Punkt des betreffenden nichteuklidischen Raumes.Es wird
jedoch
von Vorteilsein,
noch weitereBestimmungsarten
der Raumelemente zu benützen. Z. B. bestimmen wirhäufig
dieLage
eines Punktes durch seineZentralprojektion
und das„Bild"
einer durch ihn
gehenden Ebene;
dieFestlegung
einer Geradengeschieht
durch die Bilder der beidenPunkte,
in denen sie die angenommeneKugel
trifft.Sind zwei Geraden durch die Bilder ihrer
Durchstoßpunkte
durch dieKugel bestimmt,
so schneiden siesich,
wenn diese vier Punkte auf einem Kreiseliegen;
dieser Kreis ist dann das Bild der durchdie
beiden Geradengehenden
Ebene.Liegen
die vier Punkte nicht auf einemKreis,
so sind die Geraden windschief.Die Ebenen eines Büschels bilden sich ab als ein Kreisbüschel und zwar sind die
Grundpunkte
des Kreisbüschels reell oderimaginär, je
nachdem derTräger
des Ebenenbüschels dieKugel
in zwei reellen oderimaginären
Punkten trifft.Das Bild des absoluten Poles einer
Ebene,
d. h. des Poles der Ebene inBezug
auf die als absolute Fläche angenommeneKugel,
fällt in denMittelpunkt
desKreises,
der das Bild der Ebene ist. Demnach schneiden sich die Bilder zweierGeraden,
diebezüglich
derKugel konjugiert polar sind, rechtwinklig,
Ebenso treffen sich die Bilder zweierEbenen,
von denen die eine durch den absoluten Pol der anderngeht,
unter rechten Winkeln.Durch die Annahme zweier Kreise
kj
undk2
und derenMittel¬punkte Ki
undK2
in der Bildebene sind im Räume zwei EbenenE]
undE2
und ihre absoluten Pole bestimmt. Diegegenseitige Lage
vonEj
undE2
ist durch die Kreiseki
undk2 völlig gegeben.
Schneiden sich
kj und,k2
indenPunkten Ui
undTJ2,
so istVi U2
=s das Bild derSchnittgeraden
vonEi
undE2; KiK2
=s* ist dasBild der zu s
konjugierten
Polaren. Ein Kreisk,
derkx
undk2 rechtwinklig trifft,
stellt das Bild einer durch s*gehenden
Ebene Edar;
ihr Pol Kliegt notwendigerweise
auf s. DieSchnittgeraden
von E mit
Ej
undE2
treffen s* in denDurchstoßpunkten Px
undP2
von s* durch
Ex
undE2.
Durch die PunkteKi, Pls K2, P2
ist die absolute Involution auf s* bestimmt. Somit kann also auf einfache Weise die absolute Involution auf einerGeradenangegeben werden,
ohne dieFixierung
des absoluten Gebildes. Das heißt:Die meisten
projektiven
Konstruktionen kön¬nen
durchgeführt werden,
ohne daß das absolute Gebilde inBezug
auf unsere Bildebenefestge¬
legt
ist.Es betrifft dies diese
Konstruktionen,
in denen der Bildebenenur die
Bedeutung
alssolche,
aber keine weitere zukommt.Spielt
sie aber in einerAufgabe
eine besondereRolle,
d. h. sind in ihrgewisse
Konstruktionselementegegeben
odergesucht,
somuß die
gegenseitige Lage
von Bildebene und absoluter Flächegegeben
sein. DieseFestlegung
werden wirspäter
in den be¬treffenden
Aufgaben
vornehmen.Durch diese
eindeutige Abbildung gelangen
wir zu einfachen Konstruktionen. Wirgeben
inFolgendem
dieLösungen
der funda¬mentalen
Aufgaben
derhyperbolischen
undelliptischen
Geometrie.I. TEIL
Die hyperbolische Geometric
§
1. Definitionen undHauptsätze
derhyperbolischen
Geometrie.Um uns in den
folgenden Betrachtungen
kürzer fassen zukönnen, geben
wir eineZusammenstellung
derwichtigsten
vonuns
gebrauchten
Definitionen und Sätze.1. Das absolute Gebilde des
hyperbolischen
Raumes ist einereelle,
nichtdegenerierte
Fläche zweiten Gra¬des,
die sogenannte absolute Fläche.2. Die Punkte im Innern der absoluten Fläche nennen wir reale
Punkte,
imGegensatz
zu denäußern,
den idealenPunkten,
die für einhyperbolisches
Wesenunzugänglich
sind.Eine
Ebene,
die reale Punkteenthält,
heißt eine realeEbene,
einesolche,
die nur ideale Punktebesitzt,
eine ideale Ebene.Analog
unterscheiden wir zwischen realen und idealen Geraden.3. Jede
eigentliche
oder reale Gerade hat zweireelle,
unend¬lich ferne
Punkte;
es sind dies ihreSchnittpunkte
mit der abso¬luten Fläche. Wir nennen sie die beiden Enden der Ge¬
raden. Zwei
Geraden,
die in einer Ebeneliegen,
treffen sich in einem realen oder idealenPunkt,
oder in einem Punkte der absoluten Fläche.Demzufolge
unterscheiden wir zwischen sichschneidenden,
nichtschneidenden undparallelen
Geraden.4. Die unendlich fernen Punkte einer Ebene
liegen
auf der Schnittkurve der Ebene und der absoluten Fläche. Ihre Gesamtheit bildet denabsolutenKegelschnitt
derbetreffenden Ebene.5. Die durch einen Punkt
gelegten
Ebenen zerfallenbezüglich
einer nicht durchihngehenden
Ebene inschneidende,
nicht¬schneidende und einfach unendlich viele
parallele.
Schnei¬dende Ebenen treffen sich in einer
realen,
nichtschneidende in einer idealen Geraden. Dieparallelen
Ebenen umhüllen denKegel
zweitenGrades,
der den Punkt mit dem absolutenKegel¬
schnitt, der Ebene verbindet. Zwei Ebenen sind also
parallel,
wenn ihreSchnittgerade
eineTangente
der absoluten Fläche ist.6. Durch die Annahme der absoluten Fläche und zweier Kon¬
stanten ist die
hyperbolische
Geometrie bestimmt.7. Wir definieren als den Abstand r der Punkte A und B
r =
klgCABUiUs),
wo
Ui
undU2
die beiden Enden ihrerVerbindungsgeraden sind,
und k einebeliebige,
reelle Konstante bedeutet. SindEx
undE2
zweiEbenen, TI1
undIT2
dieTangentialebenen
von ihrer Schnitt¬geraden
an die absoluteFläche,
so ist der Winkel q> der beiden EbenenEj
undE2 gegeben
durchcf=k' i
lg (Ei E2 ir± n2). (k' reell,
i=f
—1).
8. Demnach haben zwei reale Punkte einen reellen
eindeutigen
Abstand. ZweiEbenen,
die sich in einer realen Geradentreffen,
bilden einen reellenWinkel,
dessenMessung
die Periode 2k'?r besitzt. Einer vollenUmdrehung entspricht
der Winkel 4k'ji.9. Der Winkel zweier sich schneidender Geraden a und b wird
dargestellt
durch denEbenenwinkel,
den die beiden Ebenenbilden,
welche die Geraden mit dem absoluten Pol der Ver¬bindungsebene
von a und b verbinden.10. Ist
F^
=SSa'kXlXk=0 (i.
k =1,
2,3, 4j
die
Gleichung
der absoluten Fläche in Punktkoordinaten unddieselbe in
Ebenenkoordinaten,
wo --a.kX.Xk undZZa^^
zweiindefinite, quadratische
Formenbedeuten,
und setzt man\- 10 —
so läßt sich die Größe des Abstandes r der beiden Punkte A
(x1(
x2,x3,x4)
und B(y1(
y2, y3,YÙ
ausdrücken in der Formr =
klg ^y+faly -Fxx -Fyy F)ty
—>Fxy —Fxx'Fyy
oder
F
cos- - xv
2ki
|/Fxx-Fyy
2kiJ/ Fxx-Fyy
Für den Winkel zweier Ebenen
Ei (£1, §2, £s, £4)
undE2 {%,
t]3, rls,W
erhalten wir dieBestimmungsgleichungen
COS ^rr-r=--^== < Sltl prV", =
/
— ~ ~ >2k
y(!>,, 0),v
2k f<p|r Qrr]
11. Zwei Ebenen stehen
rechtwinklig aufeinander,
wenn die eine durch den absoluten Pol der anderngeht,
denn es ist dann<%? =-0,
also <p—Yn.12. Von den 15 fach unendlich vielen Kollineationen des Raumes transformieren 6 fach unendlich viele die absolute Fläche in sich selbst. Eine
jede
solche Kollineation ist eineBewegung
deshyperbolischen Raumes,
da durch sie die Maßverhältnisseuhgeändert bleiben.2)
Diese Definitionen und Sätze führen nun
infolge
ihrer pro¬jektiven Eigenschaften
zu einfachen Konstruktionen der metrischenAufgaben
deshyperbolischen
Raumes.§
2.Winkelhalbierungs-
und Mittelnormalebenen.1.
Aufgabe.
Es sind dieWinkelhalbierungsebenen
eines Ebenenwinkels zu bestimmen.Auflösung, a)
Die Scheitelkante ist eine reale Gerade. Sind die beiden EbenenEx
undE2 gegeben
durch ihre beiden absoluten Kreise~kt
undk2 (vgl. Fig. 1),
so ist ihre ge¬meinsame Potenzlinie die
Schnittgerade
s der beiden Ebenen.Die
Verbindungsgerade
s* der PunkteKx
undK2
ist die kon- x) Clebsch-Lindemann, Vorlesungen über Geometrie, IL Band.2) Klein, F., Vorlesungen über nichteuklidische Geometrie.
jugierte
Polare zu sbezüglich
der absolutenFläche,
da dieMittelpunkte Kt
undK2
die Bilder der Pole der EbenenEx
undEg
bedeuten. DieSchnittpunkte Pi
undP2
von s* mitEi
undE2
sind die Pole von s inBezug
auf die Kreiseki
undk2.
Sie könnenam einfachsten
gefunden werden,
indem wir durch s* eine Ebene E* legen. IhrBild,
der Kreisk*,
schneidetkx
undk2 orthogonal.
Die
Schnittpunkte
von s* und k* sind die beiden Enden vons*,
d. h. dieSchnittpunkte Ui
undU2
mit derKugel.
Da aber s*eine ideale Gerade
ist,
so sindUi
undU2 konjugiert imaginär.
Sie sind die
Doppelpunkte
derelliptischen Polinvolution
auf s*bezüglich k*;
diese istgegeben
durch diePunktepaare Ki, Pi
undK2,
P2. E* steht normal auf s, somit bilden ihre Schnittger¬raden ai und a2 mit
Ei
undE2
denselben Winkel wieEi
undE2.
Die
Aufgabe
ist demnach auf die Geometrie der Ebene zurück¬geführt.
Sind
Vi
undWi
dieSchnittpunkte
von ai mit k*undV2
andW2 diejenigen
von a2, so ist derSchnittpunkt
M der GeradenVi W2
und V2Wi
ein Punkt der Wüikelhalbierenden. Mliegt
aufs*,
da A der Pol ist von s* inBezug
auf k*. Die Ebene E durch Mundsist eine der
gesuchten Halbierungsebenen.
Die GeradenWiW2
undVi V»
treffen sich auf s* in M'=K. AM' halbiert den Winkelvon ai und a2 ebenfalls. Somit halbiert auch E' durch M' und s
den Winkel von
Ei
undE2.
Wie aus derFigur
ersichtlichist,
fällt der Pol K' von E' mit M zusammen; d. h.: Die beiden— 12 —
Winkelhalbierenden eines Ebenenwinkels stehen normal aufeinander. Die Kreise k und k7 sind die Bilder dieser Ebenen.
b)
Die Scheitelkante s des Ebenenwinkels ist eine ideale Gerade. Wirgeben
dieAuflösung,
weil wiruns
später
daraufberufen,
obsehon das Verfahren dasselbeist,
wie im ersten Falle. Für einhyperbolisches
Wesen fällt dieBedeutung
dieser Winkelhalbierenden als solchedahin,
da der Winkel der beiden Ebenenimaginär
ist. DieHalbierungsebene
stellt aber den Ort von allen Punkten
dar,
die vonEt
undE2 gleiche
Abstände haben.Die Involution auf der Geraden
s*, gegeben
durch die Punkte¬paare
Px, Kx
undP2, K2,
ist in diesem Fallehyperbolisch (Fig. 2)
; also sind dieDoppelpunkte Ux
undU2
reell. Wir bestimmen denMittelpunkt
M der StreckePx P2
alsSchnittpunkt
vonVt W2
und V2
Wx-
Die Ebene E durch M und s ist dieHalbierungsebene
-des Ebenenwinkels. Denn ist<Ti =
k'
ilg (E,
EJI, 77,),
(f2=k'
ilg (E E2 nt /T2),
wo
H1
undJT2
dieTangentialebenen
von s an die absolute Flächebedeuten,
sofolgt
aus(Pi
MUx U2)
=(Ex
EIh JT2), (M P2
UxU2)
=(E E2 n, n2)
und(Pi
MUx U2)
=(M P2 Ux U2).
Die zweite Winkelhalbierende Ebene F/ ist in diesem Falle
ideal;
ihr Pol K' fällt mit M zusammen.2.
Aufgabe.
Gesucht ist die Mittelnormalebene einer Strecke AB.Auflösung.
Die Mittelnormalebene ist dieEbene,
welche denMittelpunkt
M der Strecke A B mit derkonjugierten
Polaren der Geraden AB verbindet.Wir bestimmen
(Fig. 3)
dieGerade,
auf der die PunkteA und B
liegen,
durch ihre EndenUi
undU2.
ZurAufsuchung
desMittelpunktes
M von ABlegen
wir durch AB eine EbeneE,
die durch ihren absolutenKegelschnitt
kgegeben
ist. IstQ
der Pol der Geraden AB inBezug
aufk,
so ist M derSchnittpunkt
von
Vi
W2 undV2 W*.
Die Ebene durch M undQ
K ist die ge¬suchte Mittelnormalebene E*.
Als
Anwendung
der beiden erstenAufgaben geben
wir noch dieLösung
der beidenfolgenden.
3. A ufgabe. Es ist der
Mittelpunkt
der einbeschriebenenKugel
eines Tetraeders zu konstruieren.Auflösung. Pl5 P2, P3, P4
seien die Ecken des Tetraeders(Fig. 4).
Die Bilderk12, k13
undk23
der Winkelhalbierenden Ebenenvon
PXP2P3
undPiP8P4, PiP3P2
undP^P^
undP2P3Pt
undP2P3P4
besitzen als ihrengemeinsamen Potenzpunkt
den Mittel¬punkt
M des Tetraeders. Denn wir habengezeigt,
daß die Punkte der Winkelhalbierendengleiche
Abstände haben von den Ebenen des betreffendenEbenenwinkels,
also hat M denselben Abstandvon allen Tetraederflächen. D. h. die durch die sechs Kanten
— 14 —
gelegten
Winkelhalbierenden schneiden sich in einem Punkte.Je
drei,
die durch eine Eckegehen,
treffen sich in einer Geraden.Die
Fußpunkte
der Lote von M auf die Flächen sind die Berüh¬rungspunkte.
Nehmen wir an Stelle derangegebenen
Winkel¬halbierenden
diejenigen
derAußenwinkel,
so erhalten wir vierneue
Punkte,
die diegleiche Eigenschaft besitzen,
wie M. Es sind dies dieMittelpunkte
der anbeschriebenenKugeln.
In der
Figur
wurden dieEckpunkte Pi
und P2festgelegt
auf ihrerVerbindungsgeraden U12 V«,
undP3, P4
durchU34 V34.
Die Winkelhalbierenden von zwei Tetraederflächen können nach
Aufgabe
1 leichtgefunden werden,
sobald die Enden der Kanten und die Bilder der die Flachen enthaltenden Ebenen bestimmt sind. Um die Enden vonPiP3
zubestimmen,
legen wir durchU12,1]34, V34
denKreis,
der das Bild der EbeneU12P3P4
ist. Das zweite Ende W der GeradenU12P3
ist derSchnittpunkt
vonU13 P3
mit demangegebenen
Kreis. Der Kreis durchW, Ui2, Vj.2
ist das Bild der EbenePi P3 P3
und trifftPx P3
in dengesuchten
Punkten.4.
Aufgabe.
Man konstruiere denMittelpunkt
der um¬schriebenen
Kugel
eines Tetraeders.Auflösung.
DerMittelpunkt
der umschriebenenKugel
ist derSchnittpunkt
der Mittelnormalebenen der sechs Tetraeder¬kanten.
Sind in
Figur
5Pi, P2, P3, P4
die Ecken desTetraeders,
soist seine
Lage
bestimmt durch die GeradenU12 V12
undU34 V34
und durch die Bilder vonPt, P2, P3, P4.
Mit Hilfe der PoleA13
und
A2o
vonPj P3
undP2 P3 bezüglich
des absoluten Kreisesk123
der EbenePi P2 P3
konstruieren wir uns denMittelpunkt Mi2j
des umschriebenen Kreises des DreiecksPiP2P3.
DieMittelnormalebenen von
Px P2, P2 P3
undP3 Pi gehen
durchM123
und den absoluten PolP123
der EbenePi P2 P3.
mi23 = Mi23Pi23
ist ihreSchnittgerade.
Wir finden denMittelpunkt
M unserergesuchten Kugel,
indem wir diese Konstruktion nochmals durch¬führen;
z. B. für die EbenePiP3P4.
Die Geraden mi23 und mi34ergeben
als ihrenSchnittpunkt
denMittelpunkt M;
sie schneidensich,
da sie in der Mittelnormalebene vonP^ liegen.
M hatgleiche
Abstände vonP4, P2, P3, P4,
denn die Punkte von m123 sindgleich
weit vonPl5 P2, P3
unddiejenigen
von m13igleich
weit vonPj, P3. P4
entfernt.— 16 —
§
3. Abstandsfläche eines Punktes und einer Ebene.5.
Aufgabe.
Ist eineKugel gegeben
durch das Zentrum M und den RadiusMP,
so sind weitere Punkte derselben und ihre Schnittkurve mit einer Ebeneanzugeben.
Auflösung.
BedeutetPt
ein weiterer Punkt derKugel
um M durch P und sind
Ui
undVx
die Enden der GeradenMPx,
so
gilt (vgl. Fig. 6)
(MP!UiVi
=(MPUV).
Demnach stehen alle
Kugeln
in räumlich kol¬linearer
Beziehung
zur absolutenFläche,
sind also Flächen zweiten Grades. DerMittelpunkt
M ist Kollineations- zentrum; die absolute Polarebene von M ist Kollineationsebene.Sind R und S die beiden noch fehlenden
Diagonalpunkte
desvollständigen
VierecksUVUiVi,
so liefern die Geraden RP und SP aufUiVi
bekanntlich zwei weitereKugelpunkte Px
undP2.
Der
Schnittpunkt
von RP4
und U V oder von SPx
und UVgibt
den zu P diametralen Punkt P'. Auf diese Art könnenbeliebig
viele Punkte derKugel gefunden
werden. DieTangentialebene
in einem Punkte der Fläche ist die Normalebene zu seinemRadius, geht
also durch diekonjugierte
Polare seines Radius. DieseEigenschaft folgt
aus der kollinearenBeziehung
derKugel
und der absoluten Fläche.Um den
Kugelkreis,
der in der Ebene Bliegt,
zubestimmen,
legen
wir durch das Lot Mil von M auf E eine Ebene E*(k*
sei ihr absoluterKegelschnitt; vgl. Fig. 7).
Wir bestimmen dieauf der
Schnittgeraden
s von E und E*gelegenen Kugelpunkte Pi
undP2
mit Hilfe dervorigen Aufgabe.
Dadurch"ist der Kreis in E vollkommen bestimmt. Für dieKonstruktion weiterer Elemente des Kreises benützt man dieKollineation,
die zwischen demKugelkreis
und dem absolutenKegelschnitt
von E besteht.Demnach lassen sich die fundamentalen
Aufgaben
über dieKugel
auf einfache Art. durch räumliche oder ebene Zentral- kollineation lösen. AlsBeispiel geben
wir noch dieAuflösung folgender Aufgabe:
Gesucht ist die
Durchdringungskurve
zweierKugeln.
Ist der Abstand der beiden Zentren M und M'* kleiner als die Summe der beiden
Radien,
so besteht die vollständige Durch¬dringungskurve
in einem reellen und einemimaginären
Kreis.Ist ein Punkt des reellen Kreises
gegeben,
so kann derselbe nachobiger Aufgabe
leichtangegeben
werden. Sind aber die beidenKugeln anderweitig gegeben,
so bestimmt man die beidenEbenen,
welche dieDurchdringungskurve enthalten,
wiefolgt:
In
Figur
8 seien die beidenKugeln
bestimmt durch die Zentren M und M' undje
einem Punkt A undA',
welche der Einfachheit halber so angenommenwurden,
daß sie mit M und M' in einer Ebeneliegen.
Von demgemeinsamen
Polartetraeder der beiden Flächen sind zweigegenüberliegende
Kantenbestimmt;
es sind dies die Geraden MM' und ihre absolute Polare s. Die
Aufgabe
vierten Grades reduziert sich somit auf solche vomzweiten Grade. Ist S der
Durchstoßpunkt
von s durch die Ebene— 18 —
MM'A
A',
so ist STräger
von einerlei Polarinvolutionbezüglich
der beiden in* dieser Ebeneliegenden Kugelkreise.
Wir bestimmen zu A und A' die beiden Polaren
bezüglich
dieser Kreise mit Hilfe derKollineation,
welche zwischen den Kreisen und k besteht. Schneiden sich die Polaren von A in A* unddiejenigen
von A'-inA'*,
so bestimmen die Strahlen vonS
nach-A, A*,
A'und A'* dieangegebene
Involution. DieDoppel¬
strahlen x=x' und y=
y' geben,
mit sverbunden,
dieEbenen,
welche dievollständige Durchdringungskurve
beiderKugeln
ent¬halten. Damit ist die
Aufgabe
auf dievorhergehende
zurück¬geführt.
A*
9
PA"
r V: ?.'• A
Af\'
y:
*. **"* ^
"
%
1°:/
J*~''''"
*s"
Jïff.â.
Abstandsfläche einer Ebene. Besitzt eine
Kugel
ein idealesZentrum,
sogeht
sie in die Abstandsfläche einer Ebene über. Sie berührt die absolute Flächelängs
des absolutenKegel¬
schnittes der Polarebene des
Kugelzentrums.
DieAufgaben
über die Abstandsflächen einer Ebene werdengleich durchgeführt,
wiediejenigen
über dieKugeln.
Ebenso erhalten wir auf
gleiche
Weis© dieLösung
derfolgenden Aufgabe:
Man bestimme die
Durchdringungskurve
einerKugel
und einer Abstandsfläche. D. h. es ist damit dieAufgabe gelöst:
Es ist der Ort aller Punkte zu
bestimmen,
die von einem festen Punkt und einer festen Ebenevorgeschriebene
Abständehaben.
! [
Sind die Zentren zweier
Kugeln
idealePunkte,
und haben die Kugelngleiche Radien,
so haben die Punkte der Durch-dringungskurve
von den beiden Polarebenen derKugelmittel¬
punkte gleiche
Abstände. DieTeile der zerfallenden Kurve vierterOrdnung liegen
in den Winkelhalbierenden Ebenen des ange¬gebenen
Ebenenwinkels.Es bleibt noch zu
bemerken,
daß dieseletzten,
für uns identischenAufgaben,
für einhyperbolisches
Wesen von ver¬schiedener Natur sind.
Aus den
angegebenen Eigenschaften folgt
der Satz:Berühren zwei Flächen
zweiten
Grades eine dritteje längs
einem reellen oderimaginären Kegelschnitt,
sogehen
durch dieSchnittgerade
die beidenEbenen,
die dieKegelschnitte
ent¬halten,
noch zweiEbenen,
in denen die vollstän¬dige Durchdringungskurve
der beiden erstem Flächenliegt.
Dieser Satz ist eine
Verallgemeinerung
des Steiner'schen Satzes überdoppeltberührende Kegelschnitte.3)
§
4.Drehungen
undSchraubungen
deshyperbolischen
Raumes.Jede
Bewegung
deshyperbolischen
Raumes ist bekanntlich eineKollineatiön,
die die abso¬lute Fläche in sich überführt. Wir beschränken uns
in
Folgendem
auf dieDrehungen
des Raumes um eine Gerade.6.
Aufgabe.
Man drehe denhyperbolischen
Raum um eine Gerade um einengegebenen
Winkel co. Gesucht ist die End¬lage
einesbeliebigen
Punktes P.Auflösung.
Bleibt bei unsererBewegung
eine Gerade gfest,
so verhalten sich ihreSchnittpunkte
mit der absoluten Fläche und dieTangentialebenen
in ihnengleich.
Mit g bleibt also auch ihreabsolute, konjugierte
Polareg*
fest.Ist g eine reale Gerade
(Fig. 9),
d. h. sind ihreSchnittpunkte
mit der absoluten Flächereell,
so haben wir es mit einer wirk¬lichen
Drehung
um eine Gerade zu tun, wobei alle Punkte Kreise(Kegelschnitte) beschreiben,
die in Normalebenen zu gliegen.
3) S teiner, Werke, Bd. II, pag. 469.
— 20 —
Sind die
Schnittpunkte
von g mit der absoluten Fläche da¬gegen
imaginär (Fig. 10),
g also eine idealeGerade,
so besteht dieDrehung
um g in einerVerschiebung
des Raumeslängs g*.
Alle Punkte beschreiben zu
g* aequidistante
Kurven(Kegel¬
schnitte).
Für unser Denken besteht zwischen diesen beiden Fällen kein
Unterschied,
da wir mit idealenPunkten,
Geraden und Ebenengleich operieren,
wie mit realen. DieseÜbereinstimmung
ist aber für einhyperbolisches
Wesen nicht vorhanden.E sei die
Ebene,
in der der Punkt P und die Gerade gliegt.
Der
Drehungswinkel
co und der Sinn derDrehung
seiengegeben
durch die Punkte A und B aufg*.
Wirlegen
durch P die Normalebene E* zu g und haben nun dieAufgabe
der Ebenevor uns: Es ist die
hyperbolische
Ebene E* um einengegebenen
Winkel zu drehen.Der
Schnittpunkt
M von E* undgist dasZentrum derDrehung.
Sind
U, Ui
undV, Vi
die Enden der Geraden MA und MB undU', U'i diejenigen
vonMP,
so liefertViU'i
aufg*
einen PunktT,
der mitUi
verbunden auf k*V'i ergibt. V'iM
ist die ge¬drehte Gerade M P. Schneidet
U'i Y\ g*
inS,
so trifft SPVi
M in P'. P' ist der um die Gerade g um den Winkel a> ge¬drehte Punkt P.
Wie aus der
Figur
ersichtlich ist, sind die Strecken AB und À' B' einandergleich.
Denn die Geraden von M nach den PunktenUi, Vi, W, Wi entsprechen
den Geraden von M nachVi, U'i, Wi,
W in der Polarinvolution um Tbezüglich
des Kreisesg*.
Die Ge¬rade
g"
trifft die beidenprojektiven
Büschel in den PunktenA,B,
W,W1
undB', A', Wi,
W. Es ist also(ABWWJ
=(B'A'WiW);
d. h. AB = A'B'. Wirfinden,
daßgleiche
Strecken aufg*
von Punkten auf g untergleichen
Winkelngesehen
werden. Diesen Satz hätten wir schon inAufgabe
1 aufstellen können. Denn wirmußten,
um dieWinkel¬halbierende eines Ebenenwinkels zu
bestimmen, die,
von den beiden Ebenen auf derkonjugierten
Polaren ihrerSchnittgeraden, herausgeschnittene
Strecke halbieren. DerMittelpunkt
der be¬treffenden Strecke
gab
uns einen Punkt der Winkelhalbierenden.Analytisch hängt
der Winkel co mit der Strecke AB=r durchfolgende
Formel zusammen:10 cos 7TP
r 2k
cos -TT-.—=
Sln
2¥
Ist die
Endlage
einerbeliebigen
Geradengesucht,
so drehen wir zwei ihrer Punkte P undQ
auf die obenangegebene
Weise.P'
Q'
ist diegedrehte
Gerade PQ.
Wir haben
gesehen,
daß bei einerDrehung
um g die zu ihrkonjugierte
Polareg*
fest bleibt,g*
wird in sich verschoben und zwar steht die Größe derDrehung
um g in einem bestimmten Verhältnis zu derVerschiebung
aufg*.
Esgilt
somit der Satz:Jede
Drehung
deshyperbolischen
Eaumes um eine Gerade ist eineVerschiebung längs
ihrerkonjugierten Polaren,
undumgekehrt.
Führen wir zwei
Drehungen
aus, die eine um g, die andereum
g*,
so ersetzen wir dieDrehung
umg*
durch dieentsprechende Verschiebung längs
g. Dadurch schrauben wir den Raum inBezug
auf g alsSchraubungsaxe.
Aus demVorigen folgt aber,
daß mit g auchg*
eine Axe oderSchraubung
ist. Jede Schrau¬bung
deshyperbolischen
Raumes besitzt zwei- 22 -
Axen,
diebezüglich
des absoluten Gebildes kon¬jugiert
sind. Für einhyperbolisches
Wesen kommtjedoch
nur die reale der beiden Axen in Betracht.
Abstandsfläche einer Geraden. Bei der Schrau¬
bung bewegt
sichjeder
Punkt auf einer Abstandsfläche der Axe g. Eine solche ist durch g und einen Punkt P bestimmt.Liegt
P auf gselbst,
sodegeneriert
die Fläche in die Gerade g undzwar in das Stück der
Geraden,
das die realen Punkte enthält.Ebenso ist die absolute Fläche eine Abstandsfläche von g, denn bei der
Schraubung bewegt
sich diese in sich selbst.Legen
wir durch P und g dieEbene,
so schneidet diese die Abstandsfläche in einer Abstandsliniekm
von g. DieTangente
in P ankm
steht normal zumLote,
das von P auf ggefällt
werden kann. Eine Ebene durch P normal zu g, d. h. die Ebene durch P undg*,
trifft die Abstandsfläche in einem Kreiskn,
mit dem Durchsto߬punkt
von g alsMittelpunkt.
DieTangente
in P an diesen Kreis ist normal zu dementsprechenden
Radius. Hierausfolgt,
daß dieTangentialebene
in einembeliebigen
Punkte der Fläche nor¬mal steht auf der durch den
Berührungspunkt gehenden
Trans¬versalen von g und
g*.
Durch dieDrehung
der Meridiankurvekm
um g oder derDrehung
des Normalschnitteskn
umg*
er¬zeugen diese Kurven die Fläche. Diese berührt demnach die absolute Fläche in zwei
Punkten,
den beiden Enden von g.Umnoch die Methode einer
speziellen Drehung
zuentwickeln, geben
wir dieAuflösung
derfolgenden
7.
Aufgabe.
Es ist die Ebene E in die BildebeneJTum¬zuklappen.
Auflösung.
In den bereitsgelösten Aufgaben gelangten
wir immer zu denLösungen,
ohne daß wir das absolute Gebildegegenüber
unserer Tafelfestlegten.
Dieangegebenen Lösungen
sind,
wie aus den Konstruktionenfolgt,
auch fürjede beliebige
Lage
der zu Grundegelegten Kugel gültig.
In dieserAufgabe
spielt
aber die Bildebene eine besondereRolle,
somit muß die absolute Fläche derLage
und Gestalt nachgegeben sein;
damit istdann auch dasProjektionszentrum
unsererAbbildung
bestimmt.Wir erhalten die einfachsten
Konstruktionen,
indem wir die Bildebene ffdurch das Zentrum der absolutenKugel legen.
Durch dieAngabe
des absolutenKegelschnittes
h von ITsind die not¬wendigen Festlegungen getroffen.
DerMittelpunkt
von h stellt sowohl das Bild des Poles H von Ff wie auch dieNormalprojektion
Z' desProjektionszentrums
Z dar. h ist der Distanzkreis vonZ,
der sogenannteHauptkreis.
E sei in
Figur
11 wie immer durch k und das Bild K ihres Polesgegeben,
s sei ihreSchnittgerade
mitFf;
s* die zu s kon¬jugierte
Polare. ZurLösung
unsererAufgabe legen
wir durchs* die zu s normale Ebene
E',
derenSpur
mit dem Bilde von s*zusammenfällt. Durch die
Umlegung
von E' in nfällt ihr absoluterKegelschnitt
inh,
Z in[Z]
und s* in[s*].
DieSchnittgerade
ABvon E' und Ekommt in
[A] [B]
zuliegen.
Ist P ein Punkt von AB,
so erhalten wir
[P]
alsSchnittpunkt
der Geraden P[Z]
und[A] [B].
Bei der
Umklappung
von E in n dreht sich E' in sich um S.Die
Umklappungen
von A und B fallen in(A)
und(B),
insofern wir eine bestimmte der beidenmöglichen Umklappungen
heraus¬greifen;
im andern Falle vertauschen sich die Punkte(A)
und— 24 —
(B).
Wir finden(P)
durchVermittlung
desSchnittpunktes [M]
von
[s*]
undLA] (A),
denn es istS[P]
=S(P).
Die Zentral¬projektion
M von[M]
ist das Bild des Poles einer Winkelhal¬bierenden Ebene von E und ITund stellt das Zentrum der Kol- lineation
dar,
die zwischen den Elementen von E und den ent¬sprechenden
derUmklappung
besteht. Somit erhalten wir auf einfache Weise dieUmklappung
eines weiteren PunktesQ
von E wiefolgt:
Ist g =PQ,
so ist(g)
dieVerbindung
von(P)
mit demSchnittpunkt
von g und s.(Q)
=(g)
XMQ.
An Stelle vong könnte auch A
Q
oder BQ
genommen werden.Natürlich kann diese
Lösung
auch erreicht werden durch dieMethode,
die inAufgabe
6 entwickeltwurde;
die oben an¬gegebene
ist aber für diesenspeziellen
Fallvorzuziehen,
da die Konstruktion nur das Ziehen von Geraden erfordert.8.
Aufgabe.
Einegegebene
Strecke AB soll auf einer andern Geraden g von P ausabgetragen
werden.Auflösung.
Manprojiziert
die Strecke auf eine Trans¬versale der Geraden AB und g und von da auf g selbst. Dann verschiebt man ihre
Projektion,
bis der eine oder andere End¬punkt
in P fällt.Die Gerade AB sei durch ihre Enden U und
V,
die Geradeg durch
Ui
undVi
im Räumefestgelegt.
Da g und AB wind¬schief
"sind,
dürfenU, V, Ui, Vi
nicht auf einem Kreiseliegen (Fig. 12),
Durch P und ABlegen
wir die Ebene E(k
sei ihr abso¬luter
Kegelschnitt).
Wirprojizieren
die Strecke AB von T aus auf die durch Pgehende
und in Eliegende
Geradeg'.
A' B' = AB.Vom Punkte T aus, der in der Ebene Efder beiden Geraden g und
g' liegt, projizieren
wir A'B' auf g und erhalten A"B".A"B"=AB.
Wir haben noch A"B" auf g zu verschieben bis A" oder B" mit P zusammenfällt. D. h. wir drehen den Raum um die
konjugierte
Polare zu g. Die weitereAuflösung gibt Aufgabe
6.Die
Lösung
kannverschiedenartig gestaltet
werden. Bei¬spielsweise
könnte A' B' aufg'
so verschobenwerden,
bis A' inP fällt. Dann schneidet der
Kreis,
der durch den verschobenen Punkt B'geht,
P als Zentrum besitzt und in E'liegt,
g in den gesuchten Punkten.Wir
geben
für den zweiten Teil der obengelösten Aufgabe,
also für dieVerschiebung
einer Strecke auf der durch sie be¬stimmten Geraden eine zweite
Lösung.
Dadurch werden wir eine Konstruktionsmethode kennenlernen,
die zu den denkbar ein¬fachsten
Lösungen führt,
und die aus der von uns benützten soforthergeleitet
werden kann.Legen
wir durch einen Punkt deshyperbolischen
Raumes dasEbenenbündel,
so wird dasselbe in unsererAbbildung
durch ein Kreisbündeldargestellt.
Das Bild des betreffenden Punktes hat inBezug
auf alle Kreise des Büschels dieselbe Potenz k2.Die realen Punkte des
hyperbolischen
Raumes besitzen eine nega¬tive,
die idealen einepositive,
die Punkte der absoluten Fläche eine verschwindende Potenz. Ordnet man nunjedem
Punkte P deshyperbolischen
Raumes einen beistimmten Punkt P' des eukli¬dischen Raumes zu und zwar so, daß die
Normalprojektion
vonP' auf die Bildebene zusammenfällt mit der
stereographischen Projektion
von P und daß die Kote z' von P'gleich
istY— k2,
wo k? die oben definierte Potenz
bedeutet,
so hat man damit denhyperbolischen
Raum auf den euklidischenabgebildet.
Um eineeindeutige Abbildung
zubesitzen,
bestimmenwir,
daß immernur der
positive
Wert vonY
—k2 genommen werden soll. Damit wird derhyperbolische
Raumeindeutig
auf einen durch die Bildebene bestimmten euklidischen Halbraumabgebildet.
Den realen Punkten deshyperbolischen
Raumesentsprechen
diereellen,
den idealen dieimaginären
Punkte des euklidischenHalb¬raumes und den Punkten der absoluten Fläche
diejenigen
der Bildebene.— 26 —
Diese
Abbildung
ist identisch mitderjenigen,
die von Poin-c a ré
angegeben wurde.4) Legen wir,
wie inAufgabe 7,
die Bildebene durch das Zentrum der absolutenKugel
und wählen wir ZZ' als z-Axe und Z' alsNullpunkt
einesrechtwinkligen Koordinatensystems,
soentspricht
dem Punkte P(x,
y,z)
deshy¬
perbolischen
Raumes der Punkt P'(x', y', z')
deseuklidischen,
wenn
x'=7. y'
=ri
und Z' =7Z7P2~(s2 + y2+z2),
wo r den Radius der als absolute Fläche angenommenen
Kugel
bedeutet. Hierausfolgt,
wie auch aus denangeführten
geo¬metrischen
Betrachtungen,
daßjeder
Ebene deshyperbolischen
Raumes eineHalbkugel
des euklidischen Raumesentspricht.
DieseHalbkugel
trifft die Bildebene normal und zwar in dem Bilde des absoluten Kreiseis derentsprechenden
Ebene deshyperbo¬
lischen Raumes. Jeder Geraden
entspricht
einHalbkreis,
dessen Ebene normal zur Bildebene steht und dessenEndpunkte
die Bilder der Enden der Geraden sind.Wir wollen diese
Abbildung
für dieLösung
der oben er¬wähnten Aufgabe benützen.
Soll AB auf g von A' aus
abgetragen werden,
so halbieren wir BA'. Wir bestimmen zu A densymmetrischen
Punkt B' inBezug
auf denHalbierungspunkt.
A'B' ist die verschobene Strecke AB.Ist in
Figur
13 die Gerade g, welche die Strecke ABenthält,
bestimmt durch die beiden Enden U undV,
so wirdihr, gemäß
ihrerAbbildung,
der Halbkreis über UV,
dessenNormalprojektion
mit gzusammenfällt, zugeordnet.
DieUmlegung
dieses Halb¬kreises sei
[g].
Den Punkten A und Bentsprechen
in der Um¬legung
die Punkte[A]
und[B].
Ziehen wir in[B]
und[A]
dieTangenten
an[g],
so treffen sich diese in einem Punkte[Mi],
dessenNormalprojektion
M derMittelpunkt
von BA' ist. Dennes ist leicht zu
zeigen,
daß(BMU V)
=(M
A'UV).
Um die Strecke AM von M aus nach V hinabzutragen,
bestimmt man*) Poincaré, H., Wissenschaft und Hypothese (Autor, deutsche Aus¬
gabe von Lindemann) 1904, pag. 42 ff. und Anmerkung 19, pag. 257ff.
den
Schnittpunkt [M'J
derTangente
in|A]
und M[MJ.
Ist[M'J [B'J
euklidischgleich [M'J[A],
so bestimmt dieNormalprojektion
von[B'J
auf g den Punkt B'. Es ist AM=MB,
also AB=A'B'.Dieses
Beispiel zeigt,
wie mit Hilfe dieserAbbildung
dieAufgaben
derhyperbolischen
Geometrie auf einfache Weise durch euklidische Konstruktionengelöst
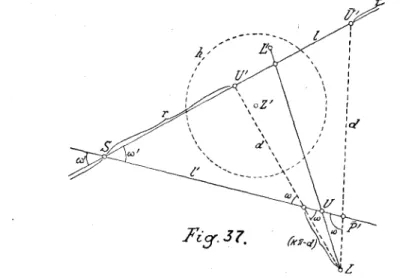
werden können.9.
Aufgabe.
EineBewegung
deshyperbolischen
Raumes istgegeben
durchAnfangs-
undEndlage
eines Punktes und durchAnfangs-
undEndlage
zweier durch ihngehender
normaler Ge¬raden. Gesucht sind zwei
Geraden,
um welche der Kaum ge¬dreht werden
muß,
damitAnfangs-
undEndlage zusammenfallen;
insbesondere ist die
Schraubungsaxe
zu bestimmen.Auflösung.
Ist dieAnfangslage gegeben
durch P und die durch ihngehenden
normalen GeradenUUi
undYVX,
dieEndlage
durch P' und dieentsprechenden
GeradenU'U'i
und VV\ (Fig. 14),
so sind durch dieZuordnung
dieser Elemente sechs Konstante bestimmt. Aus den 6 fach unendlich vielen Kol-lineationen,
die die absolute Fläche in sichüberführen,
wird demnach einespezielle herausgegriffen.
Damit ist aber die Be¬wegung noch nicht
eindeutig
bestimmt. Es muß nochangegeben werden,
in welchem Sinne sich die Enden der Geraden ent¬sprechen
sollen. Wirlegen fest,
daß dieHalbgerade
PU in P'U' und PV in P'Vübergehen
soll. Damit haben wirerreicht,
daß einer bestimmten Halbebene der Ebene PUV eine bestimmte der Ebene P' U'Ventspricht. Bringen
wir P mitP',
U mitU' und V mit V zurDeckung,
so fällt auch die Normale WWi
durch P zur Ebene PUV mit seinerentsprechenden W'W'i
zusammen.— 28 —
Durch das
Entsprechen
derHalbgeraden
PW und P'W wird einem bestimmten Halbraum derAnfangslage
ein bestimmter derEndlage zugeordnet.
Zur
Lösung
unsererAufgabe
drehen wir den Raum um dieSclmittgerade
der Ebenen PU V und P'U'V,
bis P in die EbeneP'U' V fällt. Dann dreht man noch um die
Gerade,
welche durch den absoluten Pol der Ebene P'U'Vgeht,
bis diegedrehten
Punkte P,U,
V in ihreentsprechenden P', U',
V zuliegen
kommen.Mit Hilfe der
Aufgabe
6 drehenwir den Raum um die Schnitt¬gerade
a der Ebenen PU V und F U' V(Fig. 14). P", U",
V" seien diegedrehten
PunkteP, U,
V.P, U,
V undP", U",
V"entsprechen
sich in der Involution mit dem Pol einer der Winkelhalbierenden Ebenen der beiden als Zentrum. Es sind also zwei Fällemöglich.
Es ist der Pol zu
wählen,
der drei solche PunkteP", U",
V"liefert,
welche dann mitP', U',
V auch wirklich durch eine endlicheDrehung
oderVerschiebung
zurDeckung gebracht
werden können.Ist M der Punkt der Ebene P' U'