Fourier- und Laplace-Transformationen
Skriptum zur Vorlesung Sommersemester 2019
Universität Trier Fachbereich IV Mathematik/Analysis
Contents
1 Fourier-Transformation auf dem Einheitskreis 3
2 Der Satz von Fejér und Anwendungen 9
3 Fourier-Transformation inRN 20
4 Anwendungen und Folgerungen 32
5 Laplace-Transformation 39
6 Eine Anwendung: Beweis des Primzahlsatzes 50
A Maße und Integrale 56
1 Fourier-Transformation auf dem Einheitskreis
Ist(ck)k∈N0 eine absolut summierbare Folge1 inC, so konvergiert die Potenzreihe
∞
P
ν=0
cνzν nach dem Weierstraß-Kriterium gleichmäßig auf der abgeschlossenen Einheitskreisscheibe B:={z:|z| ≤1} inC. Die Funktionf :B→Cmit
f(z) :=
∞
X
ν=0
cνzν (z∈B)
ist damit stetig auf B. Außerdem ist f beliebig oft differenzierbar auf der offenen Kreis- scheibeD:=B◦={z:|z|<1} und
ck =f(k)(0)/k!
derk-te Taylor-Koeffizient von f. Aufgrund der2πi-Periodizität der Exponentialfunktion
ist 1
2π Z π
−π
eintdt=δn,0 fürn∈Zund damit gilt
1 2π
Z π
−π
f(eit)e−iktdt=
∞
X
ν=0
cν 1 2π
Z π
−π
ei(ν−k)tdt=
∞
X
ν=0
cνδν,k=ck (k∈N0).
Also lassen sich die Taylor-Koeffizienten auch per Integration aus f berechnen. Wir schreiben S := {z ∈ C : |z| = 1} für den Einheitskreis in C. Ist (ck)k∈Z eine absolut summierbare (zweiseitige) Folge inC, so ist mit gleicher Argumentation wie oben
f(z) :=
∞
X
ν=−∞
cνzν := lim
n→∞
n
X
ν=−n
cνzν
(z∈S)
stetig aufSund nun für alle k∈Z ck= 1
2π Z π
−π
f(eit)e−iktdt.
Mit m bezeichnen wir das normierte Bogenmaß auf S, d. h. 2πm ist das Bildmaß von λ[−π,π] unter der Abbildung t 7→ eit (siehe Anhang). Für m-integrierbare Funktionen f gilt dann
Z
f dm= 1 2π
Z
f(eit)dλ[−π,π](t) = 1 2π
Z π
−π
f(eit)dt .
Weiter setzen wirLp(m) :=Lp(S,B, m)fürp∈[1,∞)(siehe wieder Anhang). Dann sind (Lp(m),k · kp)Banachräume und fürp= 2ist die Norm induziert durch das Skalarprodukt
hf, gi:=
Z
f g dm (f, g∈L2(m)),
1IstIeine Menge und(cα)α∈I eine Familie inC, so sagen wir(cα)α∈I sei absolut summierbar, falls P
α∈I
|cα|<∞ist, wobei P
α∈I
xα:= sup{P
α∈F
xα:F⊂Iendlich}für Familien(xα)α∈I in[0,∞).
Figure 1: Re(z4) = cos(4t)mitz=eitfürt∈[−π, π].
also kfk22=hf, fi=R
|f|2dm fürf ∈L2(m). DurchM ={ek : k∈Z} mit ek(z) :=zk fürz∈Sundk∈Zist ein Orthonormalsystem inL2(m)gegeben.2
Denn: Wegenz=z−1fürz∈Sgilt fürj, k∈Z hej, eki =
Z
zj−kdm(z) = 1 2π
Z π
−π
ei(j−k)tdt=δj,k.
Bemerkung und Definition 1.1 Es seif ∈L(m) :=L1(m). Dann heißt für k∈Z
f(k) :=b Z
f ekdm= Z
f e−kdm= 1 2π
π
Z
−π
f(eit)e−iktdt
k-ter Fourier-Koeffizientvonf. Wegen
|fb(k)| ≤ Z
|f|dm=kfk1 (k∈Z)
ist die Folgefb= (fb(k))k∈Zbeschränkt, alsofb∈B(Z), dem (linearen) Raum der beschränk- ten Funktionen aufZ. Man nenntfbdieFourier-Transformiertevonf und die Abbildung T :L1(m)→B(Z), definiert durch
T f :=f ,b
Fourier-Transformation (aufL1(m)). Versieht manB(Z)mit der sup-Norm k · k∞, so ist die Fourier-TransformationT eine stetige lineare Abbildung.
Fürn∈N0 heißt weiterSnf :=Snfb:=
n
P
ν=−n
fb(ν)eν, also (Snf)(z) =
n
X
ν=−n
fb(ν)zν =
n
X
ν=−n
fb(ν)eiνt (z=eit∈S),
2In Polarkoordinaten z = eit ist zk = eikt = cos(kt) +isin(kt). Daher spricht man auch vom trigonometrischen SystemM.
dien-te Fourier-Teilsummevon f und(Snf)n∈N0 Fourier-Reihevonf.
2. Ist f ∈ L2(m), so ist fb(k) = hf, eki für alle k ∈ Z. Außerdem folgt dann aus der Bessel-Ungleichunghttps://de.wikipedia.org/wiki/Besselsche_Ungleichung
X
k∈Z
|fb(k)|2≤ kfk22= Z
|f|2dm,
also insbesondere die absolute Summierbarkeit von|fb|2.
Bemerkung 1.2 1. Ist fbabsolut summierbar, so konvergiert die Fourier-Reihe (Snf) nach dem Weierstraß-Kriterium gleichmäßig aufS.
2. Istf stetig differenzierbar aufS, so setzen wir
(Df)(z) :=izf0(z) (z∈S).
Ist h(t) := f(eit)fürt∈R, so ist h∈C1(R)und 2π-periodisch mith0(t) = (Df)(eit)für t∈R. Sindf, g stetig differenzierbar aufS, so gilt die partielle-Integration-Formel
Z
(Df)g dm=− Z
f(Dg)dm.
MitDek=ik·ek ergibt sich
(Df)b(k) =ik·fb(k) (k∈Z).
Außerdem folgt aus der Bessel- und der Cauchy-Schwarz-Ungleichung dann auch, dass fb absolut summinerbar ist ([Ü]).
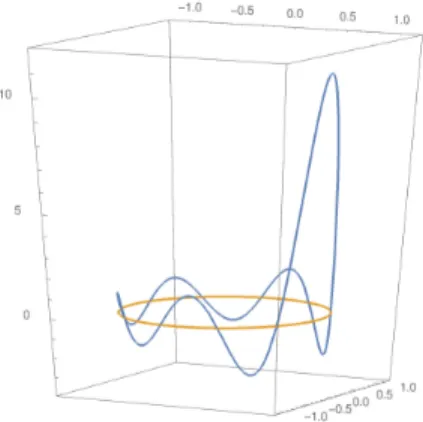
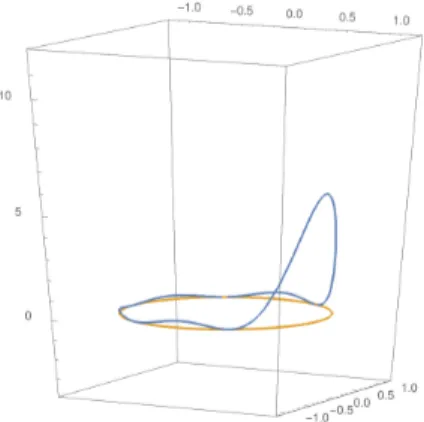
Beispiel 1.3 Wir betrachtenf :S→Rmit
f(eit) :=t2 t∈(−π, π]
. Dann ergibt sich
fb(0) = 1 2π
Z π
−π
t2dt=π2/3 und mit zweimaliger partieller Integration
fb(k) = 1 2π
Z π
−π
t2e−iktdt= 1
2πe−ikt2t k2
π
−π= 2(−1)k k2
fürk∈Z,k6= 0. Also ist fürz=eitdien-te Fourier-Teilsumme gegeben durch (Snf)(z) =
n
X
ν=−n
fb(ν)zν =π2 3 +
n
X
ν=1
(−1)ν 2
ν2(zν+z−ν) = π2 3 + 4
n
X
ν=1
(−1)ν
ν2 cos(νt).
Dafbabsolut summierbar ist, konvergiert die Fourier-Reihe gleichmäßig aufS.
Figure 2: f(eit) =t2 fürt∈(−π, π].
Wir wenden uns in nächsten Abschnitt der Frage zu, obf durch fbbereits eindeutig fest- gelegt ist und wie man gegebenenfallsf ausfbrekonstruieren kann. Mit anderen Worten:
Wir stellen die Frage nach der Invertierbarkeit der Fourier-Transformation. Wichtig ist dabei das Konzept der Faltung von Funktionen inL1(m):
Bemerkung und Definition 1.4 Aus der Translationsinvarianz des Lebesgue-Maßes auf Rergibt sich die Rotationsinvarianz des Bogenmaßesm, d. h. sindh∈L1(m)und ζ∈S, so gilt
Z
h(zζ)dm(z) = Z
h(z)dm(z).
Sind nunf, g∈L1(m), so folgt Z Z
|f(zζ)g(ζ)|dm(z)dm(ζ) = Z Z
|f(z)|dm(z)|g(ζ)|dm(ζ) =kfk1· kgk1. Mithilfe des Satzes von Fubini3 kann man zeigen, dass dasFaltungsintegral
(f∗g)(z) = Z
f(zζ)g(ζ)dm(ζ)
für m-fast allez ∈ S existiert. Außerdem giltf ∗g ∈L1(m)mit kf ∗gk1 ≤ kfk1· kgk1. Man nenntf∗g dieFaltung vonf undg. Durch die Substitutionzζ =:w, also ζ=zw, ergibt sich
f ∗g=g∗f (f, g∈L1(m))
also die Kommutativität der Faltung.4 Istf (oder g) stetig aufS, so ist auchf∗g stetig aufS ([Ü]). Schließlich gilt
(f∗g)b=fb·bg (f, g∈L1(m)).
3Siehe etwa https://de.wikipedia.org/wiki/Satz_von_Fubinihttps://de.wikipedia.org/wiki/
Satz_von_Fubini.
4Man kann zeigen, dass die Faltung auch assoziativ ist. Damit wird(L1(m),∗)zu einer Banachalgebra.
Denn: Für k∈Zist (f∗g)b(k) =
Z Z
f(zζ)g(ζ)dm(ζ)z−kdm(z)
= Z Z
f(zζ)(zζ)−kdm(z)g(ζ)ζ−kdm(ζ)
= Z
f(z)z−kdm(z)· Z
g(ζ)ζ−kdm(ζ) =fb(k)·bg(k).
Wir wollen zum Abschluss die Fourier-Transformation auf (komplexe) Maße erweitern.
Bemerkung und Definition 1.5 Es sei(X,Σ)ein Messraum. Eine Abbildungµ: Σ→ Cheißt komplexes Maß, fallsµ σ-additiv ist, d. h. falls für jede MengeA∈Σund jede disjunkte (abzählbare) Zerlegung(Aj)j∈NvonAinΣdie Folge(µ(Aj))absolut summierbar ist mit
µ(A) = X
j∈N0
µ(Aj).
Man kann zeigen:5 Es existieren genau ein Maß|µ| ≥0und eine|µ|-fast überall eindeutig definierte messbare Funktion h:X→S (also|h|= 1) mit
µ(A) = Z
A
h d|µ| (A∈B(X)).
Dabei ist |µ|endlich, also |µ|(X)<∞. Man schreibt dann auch µ=h|µ|und spricht in dem Fall von der Polarzerlegung vonµ. Für|µ|-integrierbareg:X →Csetzt man
Z
g dµ:=
Z
gh d|µ|.
Dann gilt
| Z
g dµ| ≤ Z
|g|d|µ|.
Ist(X, d)ein kompakter metrischer Raum undµein komplexes Maß aufB(X), so ist durch C(X)3g7→
Z
g dµ∈C
ein stetiges lineares Funktional auf(C(X),k · k∞)gegeben. Man kann zeigen: Jedes stetige lineare Funktional aufC(X)ist von dieser Form für genau ein komplexes MaßµaufB(X).
Dies ist die wesentliche Aussage des Rieszschen Darstellungssatzes fürC(X).6 Wir iden- tifizieren µ und das entsprechende Funktional und schreiben C(X)0 für die Menge der komplexen Maße aufC(X).
5Siehe etwa W. Rudin, Real and Complex Analysis, 3rd ed., McGraw-Hill, New York, 1987
6Ein Beweis findet sich wieder etwa in W. Rudin, Real and Complex Analysis, 3rd ed., McGraw-Hill, New York, 1987.
Bemerkung und Definition 1.6 Ist µ ∈ C(S)0, so ist die Fourier-Stieltjes Trans- formiertebµvonµdefiniert durch
µ(k) :=b µ(ek) = Z
ekdµ= Z
e−kdµ= Z
z−kh(z)d|µ|(z) (k∈Z).
Nach Definition gilt
|µ(k)| ≤b Z
d|µ|=|µ|(S) (k∈Z) und damit ist wiederµb= (µ(k))b k∈Z∈B(Z). Ist speziellµ=f m, also
Z
g dµ= Z
gf dm (g∈C(S)),
so ist µb = fb. In diesem Sinne kann man die Fourier-Stieltjes Transformation als Er- weiterung der Fourier-Transformation auffassen. Wir sprechen daher auch wieder kurz von derFourier-Transformation.
Bemerkung 1.7 Fürg∈C(S)definiert man (g∗µ)(z) :=
Z
g(zζ)dµ(ζ) (z∈S).
Dann ist auchg∗µstetig ([Ü]). Außerdem sieht man wie in Bemerkung1.4 (g∗µ)b=bg·µ.b
Beispiel 1.8 Für das Dirac-Maßδζ an der Stelleζ∈Sgilt δbζ(k) =ζk (k∈Z).
Insbesondere istδb1(k) = 1 für allek. Außerdem giltg∗δ1=g für alleg∈C(S).
2 Der Satz von Fejér und Anwendungen
Wir wollen in diesem Anschnitt die Frage nach der Darstellbarkeit integrierbarer bzw.
stetiger Funktionen über die Fourier-Reihe untersuchen und dabei auch die Frage nach der Rekonstruierbarkeit vonf ausfbbeantworten.
Bemerkung 2.1 E seien(X, d)ein kompakter metrischer Raum undµein endliches Maß aufB(X). Dann gilt fürf ∈C(X)undp∈[1,∞)
kfkp≤µ(X)1/pkfk∞.
Man kann zeigen7: Für alle p∈[1,∞)ist die Menge der stetigen FunktionenC(X) dicht in Lp(µ). Diese Aussage wird (in Varianten) im Weiteren immer wieder eingesetzt.
Bemerkung und Definition 2.2 Wir setzen
Tn:= span{ek:k=−n, . . . , n}.
Ist P =
n
P
ν=−n
λνeν ∈Tn, so nennt manP eintrigonometrisches Polynom vom Grad
≤n. Fürf ∈L1(m)undz∈Sgilt dann (f∗P)(z) = (P∗f)(z) =
n
X
ν=−n
λνzν Z
ζνf(ζ)dm(ζ) =
n
X
ν=−n
fb(ν)λνzν und damit auchf∗P ∈Tn. Wir schreibenT :=S
n∈NTnfür die Menge der trigonometrischen Polynome (von beliebigem Grad).
Bemerkung 2.3 Da (ek)k∈Z ein Orthonormalsystem von L2(m)ist, ergibt sich aus dem Projektionssatz (siehe lineare Algebra)
kf−Snfk2= min
P∈Tn
||f−P||2= dist(f,Tn). (2.1) für alle f ∈L2(m). Also: Snf ∈Tn ist die beste Approximation aus Tn an f bezüglich derk · k2-Norm. Insbesondere istf =Snf genau dann, wennf ∈Tn. Wir wollen zeigen, dass
||f −Snf||2→0 (n→ ∞) (2.2)
für alle Funktionen f ∈L2(m) gilt, das heißt, (Snf)konvergiert im quadratischen Mittel gegenf.
Für den Nachweis von (2.2) reicht es nach (2.1) zu zeigen, dass (irgend-)eine Folge (Pn) mit Pn∈T und
||f−Pn||2→0 (n→ ∞)
7Siehe Maßtheorie oder einmal mehr W. Rudin, Real and Complex Analysis, 3rd ed., McGraw-Hill, New York, 1987.
existiert, mit anderen Worten, die Menge der trigonometrischen PolynomeT ist dicht im Raum L2(m). Da die stetigen Funktionen eine dichte Teilmenge von L2(m) bilden und da ||f||2 ≤ ||f||∞ für f ∈C(S) gilt, reicht es zu zeigen, dass zu jeder stetigen Funktion f :S→Ceine Folge(Pn)mitPn∈T und
||f−Pn||∞→0 (n→ ∞)
existiert, mit anderen Worten, die MengeT ist dicht im Raum(C(S),|| · ||∞).
Satz 2.4 (Approximative Eins) Für n ∈ N seien Qn ∈ Tn mit R
Qndm = 1. Gilt supn∈NkQnk1<∞ und für alleδ >0
Z
S\Bδ
|Qn|dm→0 (n→ ∞), (2.3)
mit Bδ := {z ∈ S : |z−1| ≤ δ}, so konvergiert die Folge (f ∗Qn) für alle f ∈ C(S) gleichmäßig auf Sgegen f.8
Beweis. Es seiε >0gegeben. Daf stetig auf der kompakten MengeSist, istfgleichmäßig stetig. Da |zζ−z|=|ζ−1| für allez, ζ∈Sgilt, existiert einδ >0so, dass
|f(zζ)−f(z)|< ε für allez∈Sundζ∈Bδ. Es seiM >0so, dass kQnk1=R
|Qn|dm≤M für allen. Aus R Qndm= 1ergibt sich für z∈Sundn∈Nzunächst
|(f∗Qn)(z)−f(z)| = Z
(f(zζ)−f(z))Qn(ζ)dm(ζ)
≤ Z
|f(zζ)−f(z)| |Qn(ζ)|dm(ζ)
≤ Z
Bδ
ε|Qn(ζ)|dm(ζ) + Z
S\Bδ
2||f||∞|Qn(ζ)|dm(ζ), und damit auch
kf∗Qn−fk∞≤M ε+ 2kfk∞
Z
S\Bδ
|Qn|dm .
Mit (2.3) folgt||f−f ∗Qn||∞≤(M + 1)εfürngenügend groß. 2
Bemerkung 2.5 Wir nennen eine Folge(Qn)wie in Satz2.4eineFolge guter Kerne. Es stellt sich natürlich die Frage nach der Existenz. Eine naheliegende Idee besteht darin, die TeilsummenSnf als Faltung mit geeigneten Kernen aufzufassen und dann den obigen Satz
8Wegenf=f∗δ1 kann man die Konvergenzaussage als eine Art Konvergenz vonQn gegen die Eins der Faltungδ1 interpretieren. Daher der Name approximative Eins.
Figure 3: Dirichlet-KernD5(blau)
anzuwenden. Tatsächlich lassen sich für f ∈ C(S) nach Bemerkung 2.2 die Teilsummen Snf schreiben als Snf =f∗Dn, wobei
Dn :=
n
X
ν=−n
eν
denn-tenDirichlet-Kernbezeichnet (Abb. 3). Man kann zeigen ([Ü]), dass die Folge der Dirichlet-Kernekeine Folge guter Kerne darstellt.
Wir betrachten stattdessen die arithmetischen Mittel derDn. Es gilt
n
X
k=0
Dk =
n
X
k=0 k
X
ν=−k
eν =
n
X
ν=−n
eν n
X
k=|ν|
1 =
n
X
ν=−n
(n+ 1− |ν|)eν. Also ist
1 n+ 1
n
X
k=0
Skf = 1 n+ 1
n
X
k=0
(f ∗Dk) =f∗Fn, wobei
Fn :=
n
X
ν=−n
1− |ν| n+ 1
eν (n∈N)
den n-ten Fejér-Kern bezeichnet. Die Folge(Fn) erweist sich tatsächlich als eine Folge guter Kerne: Zunächst istFn∈Tn und
Z
Fndm=
n
X
ν=−n
1− |ν|
n+ 1 Z
eνdm= 1. Weiter ist fürz∈S
1 n+ 1
n
X
j=0
zj
2 = 1
n+ 1 Xn
j=0
zjXn
j=0
zj
=
= 1
n+ 1
n
X
j,k=0
zj−k= 1 n+ 1
n
X
ν=−n
(n+ 1− |ν|)zν =Fn(z),
Figure 4: Fejér-KernF5 (blau)
alsoFn≥0und damit auch kFnk1= 1für allen. Schießlich gilt fürz∈S\Bδ Fn(z) = 1
n+ 1
n
X
j=0
zj
2= 1 n+ 1
zn+1−1 z−1
2≤ 1 n+ 1 · 4
δ2 →0 (n→ ∞).
Damit giltFn→0gleichmäßig auf S\Bδ. Also ist insbesondere auch (2.3) erfüllt.
Als wichtige Folgerung erhalten wir die Konvergenz der arithmetischen Mittel der Snf in (C(S),k · k∞)gegenf:
Satz 2.6 (Fejér) Für alle f ∈C(S)gilt σnf := 1
n+ 1
n
X
k=0
Skf →f (n→ ∞) gleichmäßig aufS.
Insbesondere folgt ausfb= 0 schonf = 0 und die Menge der trigonometrischen Polynome ist dicht in(C(S),k · k∞).
Beweis. Die erste Behauptung ergibt sich unmittelbar aus Satz2.4 und Bemerkung 2.5.
Ist fb= 0, so ist auch Skf = 0 für allek∈N0, also auchf = 0. Wegenσnf ∈Tn liegen
die trigonometrischen Polynome dicht inC(S). 2
Bemerkung 2.7 Istf ∈C(S)und konvergiert(Snf)gleichmäßig aufS, so giltSnf →f. Denn: Aufgrund der gleichmäßigen Konvergenz istg:S→Cmit
g:= lim
n→∞Snf =
∞
X
ν=−∞
fb(ν)eν
stetig auf S. Außerdem gilt dann bg =fb(siehe Einleitung Abschnitt 1), also (f −g)b= 0und damitf −g= 0 nach Satz2.6.
Beispiel 2.8 Aus Beispiel1.3und Bemerkung2.7erhält man t2=π2
3 + 4
∞
X
ν=1
(−1)ν
ν2 cos(νt) für allet∈[−π, π]. Insbesondere ergibt sich damit fürt=π
∞
X
ν=1
1 ν2 = π2
6 und fürt= 0
∞
X
ν=1
(−1)ν−1 ν2 = π2
12.
Wir haben bereits gesehen, dass Fourier-Reihen stetig differenzierbarer Funktionen stets gleichmäßig konvergieren. Man könnte auf den Gedanken kommen, dass dies auch für stetige Funktionen gilt. Man kann jedoch zeigen. das stetige Funktionen existieren, deren Fourier-Reihe nicht überall punktweise konvergiert.9
Wir wollen ein relativ einfach zu beweisendes und doch recht schlagkräftiges hinreichendes Kriterium für die punktweise Konvergenz von(Snf)herleiten. Dazu beweisen wir zunächst als Folgerung aus den Satz von Fejér dasRiemann-Lebesgue-Lemma:
Satz 2.9 Für allef ∈L1(m)istfbabklingend, alsofb(k)→0 fürk→ ±∞.
Beweis. Es sei ε > 0 gegeben. Dann existiert nach Bemerkung 2.1 und dem Satz von Fejér ein trigonometrisches Polynom P mit kf −Pk1< ε. IstP ∈TN, so gilt Pb(k) = 0 für|k|> N und damit|fb(k)|=|fb(k)−Pb(k)| ≤ kf −Pk1< εfür|k|> N. 2
Bemerkung 2.10 Wir schreibenγ(z) := 1/(1−z)fürz∈S\ {1}. Ist fürf ∈L1(m)auch γ·f ∈L1(m), so gilt(Snf)(1)→0 (n→ ∞).
Denn: Für k∈Zgilt mitg:=γ·f fb(k) =
Z
(1−z)g(z)zkdm(z) =bg(k)−bg(k−1), also mit Satz2.9
(Snf)(1) =
n
X
ν=−n
fb(ν) =
n
X
ν=−n
(bg(ν)−bg(ν−1)) =bg(n)−bg(−n−1)→0 (n→ ∞).
9Ein vergleichsweise einfacher Beweis ergibt sich aus dem Prinzip der gleichmäßigen Beschränkt- heit (siehe etwahttps://www.math.uni-trier.de//~mueller/Funktionalanalysis/Funktionalanalysis_
WS1819.pdf, Satz 2.6). Wesentlich ist dabei die Tatsache, dassR
|Dn|dm→ ∞fürn→ ∞gilt.
Satz 2.11 Es seif ∈L1(m)Hölder-stetig an der Stelleζ∈S, d. h. es existierenM, α >0 so, dass|f(z)−f(ζ)| ≤M|z−ζ|αfür allez aus einer Umgebung vonζ. Dann konvergiert (Snf)(ζ) gegenf(ζ).
Beweis. Ohne Einschränkung seiζ= 1. Dann gilt
|f(z)−f(1)|
|z−1| ≤M|z−1|α−1
fürz6= 1aus einer Umgebung von1. Wegen1−α <1und|1−eit|2= 2−2 costist Z 1
|z−1|1−αdm(z) = 1 2π
Z π
−π
dt
|1−eit|1−α = 1 2π
Z π
−π
√ dt
2−2 cost1−α
<∞ (man beachte, dass√
2−2 cost∼t fürt→0). Nach Bemerkung2.10gilt (Snf)(1)−f(1) =Sn(f−f(1))(1)→0 (n→ ∞).
2 Für normierte Räume X, Y und stetige lineare Abbildungen T : X → Y bezeichnet im Weiteren
kTk:= sup{kT xk:kxk ≤1}
dieOperatornormvon T. Es gilt damitkT xk ≤ kTk · kxkfür allex∈X.
Bemerkung 2.12 Satz2.11zeigt, dass Hölder-Stetigkeit in allen Punkten jedenfalls punk- tweise Konvergenz der Fourier-Reihe gegen f impliziert. Auch wenn (Snf) nicht für alle stetigenf konvergiert, so kann man doch zeigen, dass der Fehler der Approximation durch Snf nicht viel größer ist als der minimale Fehler der Approximation ausTn heraus:
Wir betrachtenSn als Operator vonC(S)nachC(S). Dann gilt ([Ü]) kSnk=kDnk1=
Z
|Dn|dm≤3 + lnn.
WegenSnP=P für alleP ∈Tn folgt (wieder [Ü]) kf−Snfk∞≤(1 +kSk) inf
P∈Tn
kf−Pk∞≤(4 + lnn) inf
P∈Tn
kf −Pk∞.
Man beachte, dassinfP∈Tnkf−Pk∞wegen der Dichtheit vonT inC(S)fürn→ ∞gegen Null konvergiert.
Als weitere Anwendung des Satzes von Fejér bzw. der Dichtheit vonT inC(S)leiten wir ein Resultat über Ergodizität irrationaler Drehungen auf dem KreisSher (ohne uns explizit auf den Begriff der Ergodizität zu beziehen). Vorbereitend beweisen wir ein einfaches Ergebnis über Folgen linearer Operatoren.
Satz 2.13 Es seien X ein normierter Raum, Y ein Banachraum und (Tn) eine Folge linearer AbbildungenTn:X →Y mit
sup
n∈N
kTnk<∞.
Konvergiert die Folge (Tnx)n für alle x aus einer inX dichten Menge D, so konvergiert (Tnx)n für alle x ∈X und durch T x := lim
n→∞Tnx ist ein lineare Abbildung T : X → Y definiert mit
kTk ≤lim infkTnk.
Beweis. Es seienx∈X undε >0 gegeben. Dann existiert einy ∈D mit kx−yk< ε.
Weiter existiert ein N ∈ Nmit kTky−Tmyk < ε für k, m ≥N. Also gilt fürk, m ≥N auch
kTkx−Tmxk ≤ kTk(x−y)k+kTky−Tmyk+kTm(y−x)k ≤(2 sup
n∈N
kTnk+ 1)ε.
Damit ist (Tnx)eine Cauchy-Folge in Y, also konvergent. Da die Abbildungen Tn linear sind, ist die punkteise GrenzfunktionT ebenfalls linear. Es sei(nj)so, dass
kTnjk →lim infkTnk (j→ ∞).
Fürkxk ≤1 gilt dannkT xk= lim
j→∞kTnjxk ≤ lim
j→∞kTnjk= lim infkTnk. 2 Ist X eine Menge und ϕ :X → X, so schreiben wir ϕj für diej-te Iterierte von ϕ, also ϕ0= idX undϕj=ϕ◦ϕj−1fürj∈N.
Satz 2.14 Istθ∈R\Qundϕdie Drehung um den Winkel2πθauf S, alsoϕ(z) =e2πiθz fürz∈S, so gilt für alle stetigen Funktionenf :S→C
1 n+ 1
n
X
j=0
f◦ϕj= 1 n+ 1
n
X
j=0
f(e2πijθ·)→ Z
f dm (n→ ∞) gleichmäßig aufS.10
Beweis. Wir betrachten die Folge der linearer Operatoren Tn : C(S) → C(S), definiert durch
Tnf := 1 n+ 1
n
X
j=0
f◦ϕj.
Wegen kf ◦ ϕjk∞ = kfk∞ gilt kTnfk∞ ≤ kfk∞ für f ∈ C(S) und damit kTnk ≤ 1.
Wegen der Dichtheit von T in C(S) reicht es nach Satz 2.13, die Behauptung für alle trigonometrischen Polynome zu zeigen. Aus Linearitätsgründen reicht es dazu wiederum,
10Genauer: Gegen die konstante FunktionS3z7→R f dm.
die Behauptung für die Monomeek zu beweisen.
Wir setzen ζ:=e2πiθ. Da θ irrational ist, istζ keine Einheitswurzel. Fürk∈Z\ {0}gilt damitζk6= 1, also
n
X
j=0
(ek◦ϕj)(z) =
n
X
j=0
(ζjz)k=zk· 1−ζk(n+1)
1−ζk (z∈S) und folglich
||Tnek||∞≤ 2
(n+ 1)|1−ζk| →0 (n→ ∞).
Außerdem ist Tne0 =Tn1 = 1. Wegen R
ekdm= 0für k 6= 0undR
e0dm= 1 folgt die
Behauptung. 2
Wir ziehen weitere Folgerungen aus den Satz von Fejér, jetzt für die Fourier-Transformation auf den Räumen L2(m) und L1(m). Für beliebige Mengen X und p ∈ [1,∞) setzen wir `p(X) := (Lp(X),Pot(X), σ), wobei σ das Zählmaß auf X bezeichnet. Dann gilt für g= (gx)x∈X
Z
|g|pdσ= X
x∈X
|gx|p.
Insbesondere istg∈`1(X)genau dann, wenng absolut summierbar ist.
Satz 2.15 1. Für f ∈ L2(m) gilt ||f −Snf||2 → 0 (n → ∞) und die Parsevalsche Gleichung11
||f||22=X
ν∈Z
|fb(ν)|2(=kfbk2`
2(Z)).
2. Die Fourier-Transformation L2(m)3f 7→fb∈`2(Z) ist ein isometrischer Isomorphis- mus (Satz von Fischer-Riesz).12
Beweis. 1. Da die Menge der trigonometrischen Polynome dicht in (C(S),k · k∞), folgt die erste Behauptung aus Bemerkung2.3.
Weiter giltSnf ∈ Tn und nach dem Projektionssatzf −Snf ⊥p für allep∈ Tn. Also ergibt sich aus dem Satz von Pythagoras ([Ü])
||f||22 = ||f−Snf||22+||Snf||22.
Wegen ||f −Snf||22 →0 (n→ ∞)folgt ||Snf||22→ ||f||22 (n→ ∞). Außerdem ist, wieder mit dem Satz von Pythagoras,
||Snf||22 = ||
n
X
ν=−n
fb(ν)eν||22 =
n
X
ν=−n
|fb(ν)|2keνk22=
n
X
ν=−n
|fb(ν)|2.
11Dies ist auch äquivalent dazu, dass{ek:k∈Z}eine Orthonormalbasis vonL2(m)ist.
12Eine lineare Abbildung T : X → Y zwischen zwei normierten Räumen X und Y ist genau dann isometrisch, wennkT xk=kxkfür allex∈Xgilt.
Hieraus ergibt sich die Parsevalsche Gleichung.
2. Nach 1. ist die Fourier-Transformation isometrisch (und damit insbesondere injektiv).
Die Surjektivität ergibt sich aus der Vollständigkeit vonL2(m)([Ü]). 2 Wir zeigen nun, dass eineL1-Version des Satzes von Fejér gilt. Damit wird dann auch die Frage nach der Rekonstruierbarkeit vonf ausfbbeantwortet.
Satz 2.16 1. Für alle f ∈L1(m)gilt
f − 1
n+ 1
n
X
k=0
Skf
1→0 (n→ ∞).
2. Die Fourier-TransformationL1(m)3f 7→fb∈B(Z)ist injektiv.
Beweis. 1. Wir zeigen: Ist(Qn) eine Folge guter Kerne, so gilt f∗Qn → f in L1(m).
Dann folgt 1. mitQn=Fn, wobei Fn dern-te Fejér-Kern ist (vgl. Bemerkung2.5).
Wir betrachten die lineare AbbildungenTn:L1(m)→L1(m)mit Tnf :=f∗Qn (f ∈L1(m)).
Es seiM := supn∈NkQnk1. Dann gilt nach Bemerkung 1.4
kTnfk1=kf ∗Qnk1≤ kfk1· kQnk1≤Mkfk1 (f ∈L1(m))
und damit kTnk ≤ M. Offensichtlich sind die Tn linear. Für f ∈ C(S)(und damit auf einer dichten Teilmenge von L1(m)) gilt außerdem Tnf →f gleichmäßig aufS, also auch Tnf →f in L1(m). Aus Satz 2.13folgt, dass(Tnf)n für allef ∈L1(m)konvergiert und dass durch
T f := lim
n→∞Tnf = lim
n→∞f ∗Qn (f ∈L1(m))
eine (wegen kTk ≤ M stetige) lineare AbbildungT : L1(m)→ L1(m)definiert ist. Aus T f =f fürf ∈C(S)folgt aufgrund der StetigkeitT f =f für allef ∈L1(m).
2. Klar nach 1. 2
Bemerkung 2.17 Insbesondere sieht man mit Satz 2.16.2 wie in Bemerkung 2.7: Ist f ∈L1(m)so, dass(Snf) gleichmäßig aufS konvergiert, so stimmtf m-fast überall mit einer stetigen Funktiong:S→Cüberein und es gilt
f =
∞
X
ν=−∞
fb(ν)eν
m-fast überall auf S und im Integralmittel, also inL1(m). Insbesondere ist dies dar Fall, wennfbabsolut summierbar ist, alsofb∈`1(Z)gilt.
Bemerkung 2.18 Aus der Injektivität der Fourier-Transformation auf C(S) und dem Rieszschen Darstellungssatz ergibt sich auch die Injektivität der Fourier-Transformation auf dem Raum der komplexen Maße, also auf C(S)0: Es seien µ ∈ C(S)0 mit bµ= 0 und g∈C(S). Nach Bemerkung1.7istg∗µ∈C(S)mit
0 =bg·µb= (g∗µ)b und damitg∗µ= 0nach Satz2.6, also insbesondere
Z
g(ζ)dµ(ζ) = (g∗µ)(1) = 0.
Damit ist auch R
g dµ= 0für alle stetigeng, alsoµ= 0.
Zum Abschluss gehen wir kurz darauf ein, wie man Ergebnisse über trigonometrische Ap- proximation in entsprechende Resultate über Approximation durch algebraische Polynome auf kompakten Intervallen überführen kann. Ohne Einschränkung betrachten wir das In- tervall[−1,1].
Bemerkung 2.19 Durch t 7→ cost = Re(eit) ist eine bijektive Abbildung von [0, π] auf [−1,1] gegeben mit Umkehrfunktion x 7→ arccosx. Wir definieren T : C(S) → C[−1,1]
durch
(T f)(x) := 1
2 f(eiarccosx) +f(e−iarccosx)
(x∈[−1,1], f ∈C(S)).
Dann istT linear mitkT fk∞≤ kfk∞ (alsokTk ≤1). Insbesondere ergibt sich fürk∈Z (T ek)(x) = 1
2 eikarccosx+e−ikarccosx
= cos(karccosx) (x∈[−1,1]).
IstTk:= cos(karccos(·)), so gilt T0= 1,T1= id[−1,1] und ([Ü]) fürk∈N Tk+1(x) = 2xTk(x)−Tk−1(x) (x∈[−1,1]).
Damit ist Tk ein (algebraisches) Polynom vom Grad k, genannt k-tes Tschebyscheff- Polynom, und es gilt
T ek=T e−k =Tk. Außerdem istT surjektiv: Istg∈C[−1,1], so istf mit
f(eit) :=g(cost) (t∈(−π, π]) in C(S)und es gilt
(T f)(x) = 1
2 g(cos(arccosx)) +g(cos(−arccosx))
=g(x) (x∈[−1,1]).
Ist h ∈C(S) reellwertig, so ist bh(k) = bh(−k) für k ∈N. Es sei nun (Qn)eine beliebige Folge reellwertiger trigonometrischer Polynome (wie etwa Qn =Dn oderQn = Fn) und
g∈C[−1,1]reellwertig. Istf(eit) =g(cost)wie oben, so ergibt sich wegenfb(k) =f(−k)b undQcn(k) =Qcn(−k)für
Pn:=fb(0)Qcn(0) + 2
n
X
ν=1
fb(ν)Qcn(ν)·Tν
damit
kg−Pnk∞=kT(f−f∗Qn)k∞≤ kf−f ∗Qnk∞.
Ist also(Qn)eine Folge guter Kerne (etwaQn=Fn), so konvergiert die Folge algebraischer Polynome (Pn)gleichmäßig auf[−1,1]gegeng. FürQn =Dn ergibt sich die Konvergenz von
Pn=fb(0) + 2
n
X
ν=1
fb(ν)·Tν
gegeng inC[−1,1]für alleg mit der Eigenschaft, dass(Snf)inC(S)gegenf konvergiert.
Die Fourier-Koeffizientenfb(k)lassen sich direkt aus g undTk berechnen. Genauer ergibt sich mit Substitutionx= costbzw. t= arccosx
2fb(k) =fb(−k) +fb(k) = 1 π
Z π
0
g(cost)2 cos(kt)dt= 2 π
Z 1
−1
g(x)Tk(x) dx
√1−x2.
3 Fourier-Transformation in R
NWir betrachten nun fürN ∈Nden euklidschen RaumRN. Im Weiteren sei B:=BN :={x∈RN :|x| ≤1},
wobei|x|die euklidsche Länge vonxbezeichnet. Istλ:=λN dasN-dimensionale Lebesgue- Maß aufB(RN), so setzen wirLp:=Lp(RN) :=Lp(RN,BN, λN)und schreiben kurz
Z f :=
Z
f(x)dx:=
Z
f dλN. Sindfj ∈L1(R)fürj= 1, . . . , N und ist das Tensorprodukt NN
j=1fj definert durch
N
O
j=1
fj(x) :=
N
Y
j=1
fj(xj) (x= (x1, . . . , xN)∈RN), so gilt nach dem Satz von Fubini
Z N O
j=1
fj=
N
Y
j=1
Z fj.
Bemerkung und Definition 3.1 Für das kanonische Skalarprodukt vonx, ω∈RN schreiben wir kurz
ω·x:=
N
X
j=1
ωjxj (x= (x1, . . . , xN), ω= (ω1, . . . , ωN)).
Damit definieren wireω:RN →Sfürω∈RN durch
eω(x) :=eN,w(x) :=ei ω·x (x∈RN).
Fürf ∈L1(RN)heißt damit die Funktionfb:RN →C, definiert durch fb(ω) :=
Z f eω=
Z
f e−ω= Z
f(x)e−iω·xdx, dieFourier-Transformiertevonf. Wegen
|fb(ω)| ≤ Z
|f|=kfk1 (ω∈RN) istfb∈B(RN)mit13
kfbk∞≤ kfk1.
Die stetige lineare Abbildung T : L1(RN) → B(RN), definiert durch T f := fbfür f ∈ L1(RN), nennt manFourier-Transformation(auf L1(RN)).
13Für beliebige Mengen X ist B(X) der (lineare) Raum der beschränkten Funktionen auf X, stets versehen mit der sup-Normk · k∞.
Beispiel 3.2 Füra >0undf = 1[−a,a] gilt fb(ω) =
Z a
a
e−iωtdt= 1
−iω(e−iωa−eiωa) = 2sin(aω)
ω (ω∈R).
Fürf(t) =e−|t| rechnet man nach ([Ü]), dass fb(ω) = 1
1 +iω + 1
1−iω = 2
1 +ω2 (ω∈R)
gilt. Man sieht, dass in beiden Fällenfbstetig auf Rund fürω→ ±∞abklingend ist. Im ersten Fall istfb∈Lp fürp >1aberfb6∈L1, im zweiten giltfb∈Lp für allep≥1.
Bemerkung und Definition 3.3 1. Wegen der Stetigkeit des Integrationskernse−ωals Funktion von ω undR
|f e−w|=R
|f|ergibt sich mit dem Satz von der dominierten Kon- vergenz die Stetigkeit von fbfür alle f ∈ L1 (Stichwort: Stetigkeit von Parameterinte- gralen14). Damit bildet die Fourier-TransformationL1in den TeilraumCB(RN)der steti- gen beschränkten Funktionen aufRN ab.
2. Aus der Translationsinvarianz des Lebesgue-Maßes auf RN ergibt sich fürh∈L1 und y∈RN
Z
h(x−y)dx= Z
h(x)dx.
Sind nunp∈[1,∞)undf ∈Lp undg∈L1, so folgt Z Z
|f(x−y)|p|g(y)|dx dy= Z Z
|f(x)|pdx|g(y)|dy=kfkp· kgk1. Mithilfe des Satzes von Fubini kann man zeigen, dass dasFaltungsintegral
(f∗g)(x) = Z
f(x−y)g(y)dy
fürλ-fast allex∈RN existiert und dassf ∗g∈Lp mit kf ∗gkp≤ kfkp· kgk1 gilt. Man nennt wiederf ∗gdieFaltungvon f undg. Istf :RN →Cmessbar und beschränkt, so existiert wegen
Z
|f(x−y)| |g(y)|dx dy≤ kfk∞kgk1
das Faltungsintegral(f∗g)(x)sogar für allex.
Istp= 1, so ergibt sich durch die Substitutionx−y=:u, alsoy=x−u, f∗g=g∗f (f, g∈L1)
also die Kommutativität der Faltung.15 Zudem gilt auch hier (f∗g)b=fb·bg (f, g∈L1).
14Siehe etwahttps://de.wikipedia.org/wiki/Parameterintegral.
15Wieder ist(L1,∗)eine Banachalgebra.
Denn: Für ω∈RN ist (f ∗g)b(ω) =
Z Z
f(x−y)g(y)dy e−ω(x)dx
= Z Z
f(x−y)e−ω(x−y)dx g(y)e−ω(y)dy
= Z
f(x)e−ω(x)dx· Z
g(y)e−ω(y)dy=fb(ω)·bg(ω).
3. Ein neuer Aspekt im mehrdimensionalen Fall ergibt sich aufgrund der Bewegungsin- varianz des Lebesgue-Maßes: Ist U : RN → RN eine orthogonale Transformation, also U(x) =Axmit A>=A−1, so gilt wegen|detA|= 1nach der mehrdimensionalen Substi- tionsregel16
(f◦U)b=fb◦U (f ∈L1).
4. Wegen eN,ω =NN
j=1e1,ωj gilt für f1, . . . , fN ∈L1(R)
N
O
j=1
fj b=
N
O
j=1
fbj.
Beispiel 3.4 Es seif = 1[−1,1]. Dann ist (f∗f)(t) =
Z
1[t−1,t+1]∩[−1,1](s)ds=
(2− |t|, falls|t| ≤2 0, falls|t|>2. Nach Bemerkung und Definition3.3und Beispiel3.2gilt
(f ∗f)b(ω) = 4sin2(ω)
ω2 (ω∈R).
Grundsätzlich (und grob) kann man sagen, dassfbum so glatter ist, je stärkerf für|x| → ∞ abklingt, und dassfbum so stärker für|ω| → ∞abklingt, je glatterf (mit integrierbaren Ableitungen) ist. Um weitere Eigenschaften der Fourier-Transformation herzuleiten, be- trachten wir zunächst Funktionen, die beide Bedingungen erfüllen, also glatt sind und alle Ableitungen für|x| → ∞sehr schnell abklingen.
Definition 3.5 Für N ∈ N ist der Schwartz-Raum S = SN der lineare Raum aller Funktionenu∈C∞:=C∞(RN)so, dass für alle Multiindizes α, β∈NN0
sup
x∈RN
|xα∂βu(x)|<∞
erfüllt ist, also x 7→xα∂βu(x) ∈ B(RN) gilt. Wegen S ⊂Lp für alle pist die Fourier- Transformation insbesondere aufS definiert.
16Siehe etwahttps://de.wikipedia.org/wiki/Transformationssatz.
Beispiel 3.6 Eine einfache und wichtige FunktionuN ∈S ist gegeben durch die (multi- variate)Gauß-Funktion
uN(x) :=e−|x|2/2 (x∈RN).
WegenuN =NN
j=1u1 undR u1=R
e−t2/2dt=√ 2πgilt Z
uNdλN =
N
Y
j=1
Z
u1=√ 2πN.
Satz 3.7 FürN ∈NistucN =√
2πNuN.
Beweis. Nach Bemerkung und Definition 3.3 und Beispiel 3.6 reicht es, die Aussage im FallN = 1zu beweisen.
Man sieht sofort, dassu(t) :=u1(t) =e−t2/2 die lineare Differenzialgleichung x0(t) =−tx(t)
erfüllt. Mit Differenziation von Parameterintegralen17 und partieller Integration folgt
ub0(ω) = Z
u(t)e−iωt(−it)dt=i Z
u0(t)e−iωtdt
= −i Z
u(t)e−iωt(−iω)dt=−ωbu(ω)
fürω ∈R. Man beachte dabei, dass der ausintegrierte Term wegenu∈S verschwindet.
Damit erfülltubdieselbe lineare Differenzialgleichung erster Ordnung wieu. Also istub=cu für eine Konstantec∈R. Wegenu(0) = 1undu(0) =b R
u=√
2πistc=√
2π. 2
Bemerkung 3.8 Istα∈NN0 , so definieren wir den MultiplikationsoperatorMα:S →S durch
(Mαu)(x) =xαu(x) (x∈RN).
Wie im obigen Beweis zu Satz 3.7 ergeben sich mit Differenziation von Parameterinte- gralen und partieller Integration folgende allgemeinen Ableitungsregeln für die Fourier- Transformierte von Funktionenu∈S und beliebigeα, β∈NN0 :
1. (Mαu)b=i|α|∂αbu, 2. (∂βu)b=i|β|Mβbu.18
17Wieder etwa: https://de.wikipedia.org/wiki/Parameterintegral.
18Die Formel besagt(∂βu)b(ω) =i|β|ωβbu(ω)und entspricht damit der Regel aus Bemerkung1.2für die Fourier-Koeffizienten der Ableitung im Fall des EinheitskreisesS.
Als Folgerung ergibt sich, dass für alleu∈S auchub∈S gilt, mit anderen Worten: Die Fourier-Transformation bildetS nachS ab.
Denn: Für beliebige α, β∈NN0 gilt
(∂βMαu)b(ω) =i|β|ωβ(Mαu)b(ω) =i|α|+|β|ωβ∂αu(ω)b (ω∈RN).
Da die linke Seite als Fourier-Transformierte beschränkt aufRN ist, ergibt sich die Behauptung.
Nach Satz 3.7 ist uN ein Eigenvektor der Fourier-Transformation auf S zum Eigenwert
√2πN.
Wir wenden uns jetzt der Frage nach der Inversion der Fourier-Transformation zu. Vor- bereitend befassen wir uns mit einer weiteren Variante einer Approximativen Eins. Für g∈C(RN)heißt der Abschluss von{x:g(x)6= 0} inRd derTräger19 vong, geschrieben supp(g). Wir setzenCc:=Cc(RN) :={g∈C(RN) : supp(g)kompakt}.
Bemerkung 3.9 Für h ∈ RN und f : RN → C definieren wir τhf := f(· −h), also (τhf)(x) =f(x−h)fürx∈RN. Dann gilt fürf ∈Lp
kf−τhfkp→0 (h→0).
Denn: Istg∈Cc, so istggleichmäßig stetig. Also giltτhg→ggleichmäßig auf RN fürh→0. Ist|h| ≤1, so istsupp(τhg)⊂supp(g) +B. Damit gilt auch
kg−τhgkp≤ kg−τhgk∞λN(supp(g) +B)1/p→0 (h→0).
Istε >0gegeben, so ergibt sich aus Bemerkung2.1die Existenz einer Funktion g ∈Cc mit kg−fkp< ε (man beachte: es giltR
RN\ρBN|f|p →0 fürρ→ ∞).
Wegen kτh(g−f)kp=kg−fkp folgt
kf−τhfkp≤ kf−gkp+kg−τhgkp+kτh(g−f)|p≤ kg−τhgkp+ 2ε, alsokf−τhfkp<3εfür|h|genügend klein.
Satz 3.10 (Approximative Eins, II) Es sei g∈L1 mitR
g= 1 und gr:=r−Ng(r−1·) fürr >0.
1. Istf ∈Lp, so gilt kf∗gr−fkp →0für r→0.
2. Istf ∈B(RN)gleichmäßig stetig, so giltf ∗gr→f fürr→0 gleichmäßig aufRN.
19Englisch Support
Beweis. Aus der mehrdimensionalen Substitutionsregel ergibt sich R
gr = 1 und damit f(x) = R
f(x)gr für alle r > 0. Wieder mit mehrdimensionaler Substitutionsregel erhält man für fast allex∈RN
(f∗gr−f)(x) = Z
(τuf−f)(x)gr(u)du= Z
(τryf−f)(x)g(y)dy.
1. Aus der Jensen-Ungleichung20, angewandt auf das Maßc|g|λN mitc:= 1/kgk1folgt für fast allex
cp|f∗gr−f|p(x)≤ Z
|τryf−f|p(x)c|g(y)|dy.
Integrieren bezüglichxund Anwendung des Satzes von Fubini ergibt cp−1kf ∗gr−fkpp≤
Z
kτryf−fkpp|g(y)|dy.
Füry ∈RN gilt weiter kτryf−fkp≤2kfkp undkτryf−fkp →0 (r→0). Der Satz von der dominierten Konvergenz zeigt, dass die rechte Seite in der letzten Ungleichung gegen0 konvergiert für r→0. Damit folgt die erste Behauptung.
2. Istε >0gegeben, so existiert einρ >0mitR
RN\ρBN|g|< ε. WegenR
=R
RN\ρBN+R
ρBN
folgt fürx∈RN
|(f∗gr−f)(x)| ≤ Z
|τryf −f|(x)|g(y)|dy≤2kfk∞ε+ sup
y∈ρBN
kτryf−fk∞kgk1. Wegen der gleichmäßigen Stetigkeit vonf gilt
sup
y∈ρBN
kτryf−fk∞→0 (r→0) und damit ist
kf∗gr−fk∞≤(2kfk∞+ 1)ε
fürrgenügend klein. 2
Bemerkung und Definition 3.11 Wir setzenm:=mN := (2π)−NλN und fürh∈L1= L1(m)
h∨(x) :=
Z
h(ω)eiωxdm(ω) (x∈Rd).
Substitutionω7→ −ωzeigt, dassh∨bis auf Skalierung auch die Fourier-Transformierte von ω7→h(−ω)ist, genauer gilt
h(− ·)b=bh(− ·) = (2π)Nh∨.
Außerdem bemerken wir noch, dass nach dem Satz von Fubini fürf, g∈L1 Z
fbg dm= Z Z
f(x)g(y)e−ix·ydy dm(x) = Z Z
f(x)e−ix·ydx g(y)dm(y) = Z
f g dmb (3.1) gilt.
20Siehe etwahttps://de.wikipedia.org/wiki/Jensensche_Ungleichung.
Satz 3.12 (Fourier-Inversion)
1. Füru∈S ist(bu)∨=uundkuk2=kbukL2(m)(= (2π)−N/2kbuk2).
2. Die Fourier-Transformation ist ein isometrischer Isomorphismus von(S,k · k2)auf (S,k · kL2(m)).
3. Istf ∈L1 so, dass auchfb∈L1 gilt, so ist(fb)∨=f.21 Insbesondere ist die Fourier- Transformation L13f 7→fb∈CB(RN)injektiv.
Beweis. Es seix∈RN. Füry∈RN undr >0ist mitϕ(x, r, ω) :=eix·ω−r2|ω|2/2 (2π)N/2uN,r(x−y) = (2π)N/2r−NuN(r−1(x−y)) =r−NucN(r−1(x−y))
= r−N Z
e−ir−1(x−y)·ξe−|ξ|2/2dξ
= Z
e−i(y−x)·ωe−r2|ω|2/2dω=ϕ(x, r,·)b(y),
wobei−r−1ξ=ωsubstituiert wurde. Nach dem Satz von der dominierten Konvergenz gilt fürh∈L1
Z
h(ω)ϕ(x, r, ω)dm(ω)→ Z
h(ω)eix·ωdm(ω) =h∨(x) (r→0). (3.2) 1. Da Funktionen inS beschränkt und gleichmäßig stetig sind, ergibt sich mit (3.1) und Satz3.10fürgr:= (2π)−N/2uN,r
Z
uϕ(x, r,b ·)dm= Z
uϕ(x, r,·)bdm= Z
u(y)gr(x−y)dy= (u∗gr)(x)→u(x) für r → 0 gleichmäßig auf RN. Nach (3.2), angewandt auf h = bu, ist also (u)b∨ = u.
Außerdem gilt Z
|u|2 = Z
u(x)u(x)dx= Z Z
u(x)eiωxu(ω)b dm(ω)dx
= Z Z
u(x)e−iωxu(ω)b dx dm(ω) = Z
u(ω)b u(ω)b dm(ω) = Z
|bu|2dm.
2. Wegen 1. ist auch (u∨)b=u(− ·)b b= (u)b ∨ =uund damit die Fourier-Transformation eine Bijektion von S auf S.
3. Wie in 1. ergibt sich im Fallfb∈L1 mit (3.1) fürx∈RN Z
f ϕ(x, r,b ·)dm= Z
f ϕ(x, r,·)bdm= Z
f(y)gr(x−y)dy= (f∗gr)(x).
Nach Satz3.10konvergiertf∗grinL1 gegenf. Also ist nach (3.2), angewandt aufh=fb,
wieder(fb)∨=f, jetzt inL1. 2
21Dies entspricht der Aussage aus Bemerkung2.17im Fall von Fourier-Reihen .
Beispiel 3.13 Es sei f(t) =e−|t| fürt ∈R. Nach Beispiel3.2 giltfb(s) = 2/(1 +s2)für s∈R. Dafb∈L1 und gerade ist, folgt mit Satz3.12
f = (fb)∨= 1 2π(fb)b.
Also istt7→e−|t|die Fourier-Transformierte vons7→π−1/(1 +s2).22 Bemerkung 3.14 Sindu, v∈S, so ist auchu∗v∈S.
Denn: Aus der Definition von S und der Produktregel ergibt sich per Induk- tion, dass auchu·v∈S gilt ([Ü]). Da mitu, v auch bu,bv∈S sind, ist
(u∗v)b=bu·bv∈S.
Da die Fourier-Transformation eine Bijektion aufS ist, gilt auchu∗v∈S. Wir wollen nun zeigen, dass S für alle p∈ [1,∞) dicht in Lp(RN) ist. Genauer zeigen wir dies sogar für einen Teilraum vonS. Vorbereitend beweisen wir ein Ergebnis über die Glattheit von Faltungen. Wir schreiben L∞ für die Menge der messbaren beschränkten Funktionenf :RN →C.
Satz 3.15 Sind f ∈Lp und u∈S, so ist f∗u∈C∞ mit ∂α(f ∗u) = f ∗∂αufür alle α∈NN0.
Beweis. Fürp∈[1,∞]seiq∈[1,∞]mit p+q=pq. Sindα∈NN0 undU =Uρ(0), so gilt
|∂αu(x−y)| ≤1/(|y| −ρ)N+2 (x∈U)
für|y| genügend groß. Wegen(|y| −ρ)N+2/(1 +|y|)N+1 → ∞ für|y| → ∞ existiert eine Konstante C=Cα,U ≥0 mit
|∂αu(x−y)| ≤C/(1 +|y|)N+1 (x∈U, y∈RN).
Day7→1/(1 +|y|)N+1∈Lq23 gilt, ist nach der Hölder-Ungleichung (auch fürp=∞oder q=∞)
Z
|f(y)|(1 +|y|)−(N+1)dy <∞
und damit die Funktiony7→f(y)(1+|y|)−(N+1)eine integrierbare Majorante für die Familie (y7→f(y)∂αu(x−y))x∈U. Aus dem Satz über die Differenziation von Parameterintegralen (induktiv angewandt) ergibt sich damit die Behauptung. 2
22Interpretation für die Stochastik: s7→π−1/(1 +s2)ist die Lebesgue-Dichte der Cauchy-Verteilung, alsot7→e−|t| die charakteristische Funktion von der Cauchy-Verteilung.
23Unter Verwendung des Oberflächemaßes auf der Einheitssphäre ∂BN kann man zeigen, dass y 7→
(1 +|y|)−λgenau dann integrierbar ist, wennλ > N gilt.
![Figure 1: Re(z 4 ) = cos(4t) mit z = e it für t ∈ [−π, π].](https://thumb-eu.123doks.com/thumbv2/1library_info/4441083.1586263/4.918.351.556.143.355/figure-re-cos-mit-it-für-π-π.webp)