Prof.Dr.R.Verh,M.Teuhler,A.Knospe
. .
Inst. f. Theoretische Physik
UNIVERSITAT LEIPZIG
Wintersemester 2008/09
Musterlösungen zuÜbungen zurAllgemeinen Relativitätstheorie
Aufgabenblatt 1
Aufgabe 1
GeradenwerdenaufGraden abgebildet,d.h.∀a, x0∈R4∃˜a,x˜0∈R4,sodass:
Tν(aτ+x0) = ˜aντ+ ˜xν0, ∀τ ∈R
Wobeizubeahtenist,dassfüra6= 0auh˜a6= 0,denndieWeltliniendürfennihtzuPunktendegenerieren,dieAbbildung mussalsobijektiv sein.Wirerhaltenalso:
Tν(x0) = ˜xν0 (1)
∂
∂τTν(aτ +x0) = ∂Tν(x)
∂xµ x=x0
aµ= ˜aν (2)
∂2Tν(x)
∂xµ1∂xµ2 x=x0
aµ1aµ2 = 0 (3)
Diesgiltwohlgemerktfürallea, x0∈R4.Wirshlieÿenalso,daTalsmindestensC2vorausgesetzt,undsomitdieHessishe symmetrish,dasswirausdemVershwindenderquadratishenFormdasVershwindenderMatrixfolgernkönnen.
∂2Tν(x)
∂xµ1∂xµ2 x=x
0
= 0 ∀µ1, µ2, ν, x0 (4)
Somitfolgerndaswir alle höherenAbleitungen bilden können unddiese vershwinden. T lässtsih so in eineTaylorreihe umnullentwikeln.
T(x) =B·x+X, x∈R4 (5)
,wobei
X=T(0) Bµν = ∂Tµ
∂xν(0)
Aufgabe 2
β= tanh (θ), γ= cosh(θ), γβ= sinh(θ) (6)
x′0= cosh(θ)x0−sinh(θ)n·x (7)
x
′
||= cosh(θ)x||−sinh(θ)x0n (8)
x
′
⊥=x⊥ (9)
Wirführenim R3 denProjektorP(n)auf deneindimensionalenUnterraum{αn|α∈R}ein,welherin(bzglderStandart-
basis)dieFormP(n)ij =ninj,bzw.in Matrixshreibweise
P(n) =
n1n1 n1n2 n1n3
n2n1 n2n2 n2n3
n3n1 n3n2 n3n3
=|ni hn| (10)
Λ(n, θ) =
coshθ −nTsinhθ
−nsinhθ coshθP(n)
+
0 0T
0 Id(3×3)−P(n)
=
coshθ −nTsinhθ
−nsinhθ Id(3×3)+ (coshθ−1)P(n)
=
coshθ −sinhθhn|
− |nisinhθ Id(3×3)+ (coshθ−1)|ni hn|
(11)
Nunkönnenwir indieFormeleinsetzen,wobeiauf dieReihenfolgevon hn| und|nizu ahtenist, z.B.erhältmandie3x3
raumartigeUntermatrixin folgenderWeise:
Λ(n, θ1)Λ(n, θ2)|raumartiger Teil=|nisinhθ1sinhθ2hn|+ (Id(3×3)+ (coshθ1−1)|ni hn|)(Id(3×3)+ (coshθ2−1)|ni hn|)
= sinhθ1sinhθ2|ni hn|+Id(3×3)+ (coshθ2+ coshθ2−2)|ni hn|+ (coshθ1−1)(coshθ2−1)|ni hn|ni hn|
= (sinhθ1sinhθ2+ coshθ1coshθ2−1)|ni hn|+Id(3×3)
DieanderenMatrixelementefolgeninähnliherWeise.Wirerhalten:
Λ(n, θ1)Λ(n, θ2) =
coshθ1coshθ2+ sinhθ1 sinhθ2 −(coshθ1sinhθ2+ sinhθ1coshθ2)hn|
− |ni(coshθ2sinhθ1+ sinhθ2coshθ1) (sinhθ1sinhθ2+ coshθ1coshθ2−1)|ni hn|+Id(3×3)
Nunistnurnoh zuverwenden,dasscoshθ= cos(iθ)und sinhθ=−isin(iθ):
cosh(θ1+θ2) = cos(i(θ1+θ2)) = cos(iθ1) cos(iθ2)−sin(iθ1) sin(iθ2) = coshθ1coshθ2+ sinhθ1sinhθ2
sinh(θ1+θ2) =−isin(i(θ1+θ2) =−isin(iθ1) cos(iθ2)−isin(iθ2) cos(iθ1) = sinhθ1coshθ2+ sinhθ2coshθ1
undwirerhaltendasgesuhte:
Λ(n, θ1)Λ(n, θ2) =
cosh(θ1+θ2) −sinh(θ1+θ2)hn|
− |nisinh(θ1+θ2) Id(3×3)+ (cosh(θ1+θ2)−1)|ni hn|
= Λ(n, θ1+θ2)
Aufgabe 3
Minkowski-Diagrammebildenmitunter(wennmansieeinmalverstandenhat)sehranshaulihSituationeninderspeziellen
Relativitätstheorieab. Deshalbwollen wirhiernoheinmalmit einerGegenüberstellungzubekannten Verhältnissen imR3
kurzerklären,wiesiezu konstruierensind,und wiemanetwasausihnen abliest.Dazu betrahtemandieTabelleauf der
nähstenSeite.
Standart(Euklid-)R3 Minkowski-R4
DieLänge vonVektorenwirdmitHilfeeinerMetrikgemessen:
gµν =
1 0 0 0 1 0 0 0 1
ηµν=
1 0 0 0
0 −1 0 0
0 0 −1 0
0 0 0 −1
GewisseTransformationen lassendie Metrikinvariant und bilden so die Einheitssphäreauf dieEinheitssphäre
ab. Bei Minkowskisind jedoh Vektoren der Länge -1 möglih,wodurh die Einheitssphäre in vier disjunkte
Gebieteaufspaltet:
FührtmannuneineTransformation(spezielleineRotationodereinenBoost)aus,solassensihdieKoordinaten
der(Standart-)BasisvektorendesneuenSystemsindasaltemittelsderInversenmatrixberehnenundeintragen:
cosϕ sinϕ
−sinϕ cosϕ 1 0
=
cosϕ
−sinϕ
coshθ sinhθ sinhθ coshθ
1 0
=
coshθ sinhθ
cosϕ sinϕ
−sinϕ cosϕ 0 1
=
sinϕ cosϕ
coshθ sinhθ sinhθ coshθ
0 1
=
sinhθ coshθ
Nunlassen sihKoordinaten Linien beiderSysteme in ein Diagramm eintragenlassen,man kannalso so gle-
ihzeitiginzweiSystemenablesen:
1
2
3
4 Auto/Garage
Linen gleichen Ortes imAuto-/Garagen- system
Linien gleicher Zeit im Auto-/Garagen- system
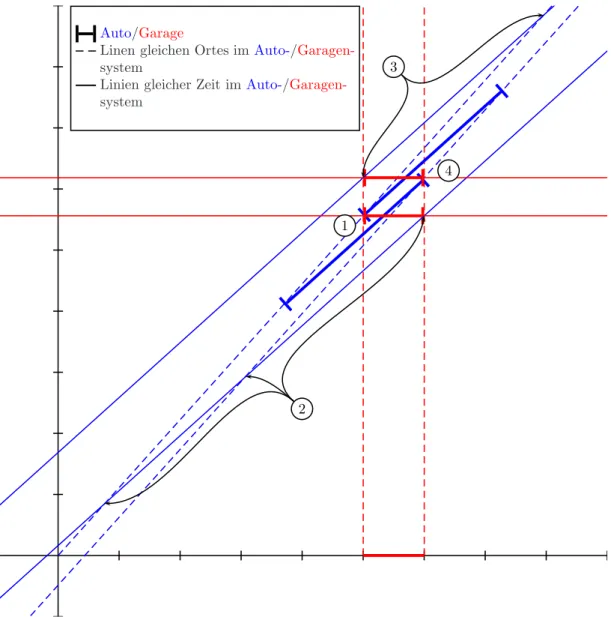
Abbildung1:Raumzeitdiagramm derSituationbei v=0.9,mit einerRuhelängeder Garage,sowiedesAutosvon1.
NummernstehenfürEreignisseundPfeilemarkierenwosihdasAutozugleihenZeitpunktaufhieltimAutosystem:
(1)ShlieÿenderVordertürderGarage,(2)ShlieÿenderHintertürderGarage,(3)ÖnenderVordertürderGarage,
(4)ÖnenderHintertürderGarage
Hier nun also noh das Problem in Worten behandelt. l(...) heiÿt immer die Länge im Ruhesystem. Indizes V und H
bezeihnenVorder-bzw.Hintertor;↑und↓ ÖnenundShlieÿen.
wirzunähsteinmaldieZeitdierenz vonShlieÿendesVordertoresundÖnendesHintertores imAutosystemaus:
∆x′0V↓H↑=γ(∆x0V↓H↑−β∆x1) = γl(Garage)−l(Auto)
β −γβl(Garage) = l(Garage)−γl(Auto) γβ
Insbesondere ist diese Dierenz bei gleiher Ruhelängevon Auto und Garage negativ, dass heiÿt dasfür den Autofahrer
geshiehtdasÖnendesHintertoresvordemShlieÿendesVordertores.ZuletztberehnenwirnohdieStrekediezwishen
beidenEreignissenimAutosystemgemessenwird:
∆x′1V↓H↑=γ(∆x1V↓H↑−β∆x0V↓H↑) =γl(Garage)−γl(Garage) +l(Auto) =l(Auto)
DasheiÿtimAutosystemsinddieEreignissegenaudieLängedesAutosvoneinanderentfernt,dasAutopasstalsoebenfalls
indieGarage.DasProblemistkonsistentin beidenSystemen.