F L¨ACHEN D ARSTELLUNGVON K URVENund S OFTWAREzur
57
0
0
Volltext
(2)(3)
(4)
(5)
(6)
(7)
(8)(9)
(10)
(11)
(12)
(13)
(14)
(15)
(16)
(17)
(18)
(19)
(20)
(21)
(22)
(23)
(24)
(25)
(26)(27)
(28)
(29)
(30)
(31)
(32)
(33)
(34)
(35)
(36)
(37)
(38)
(39)
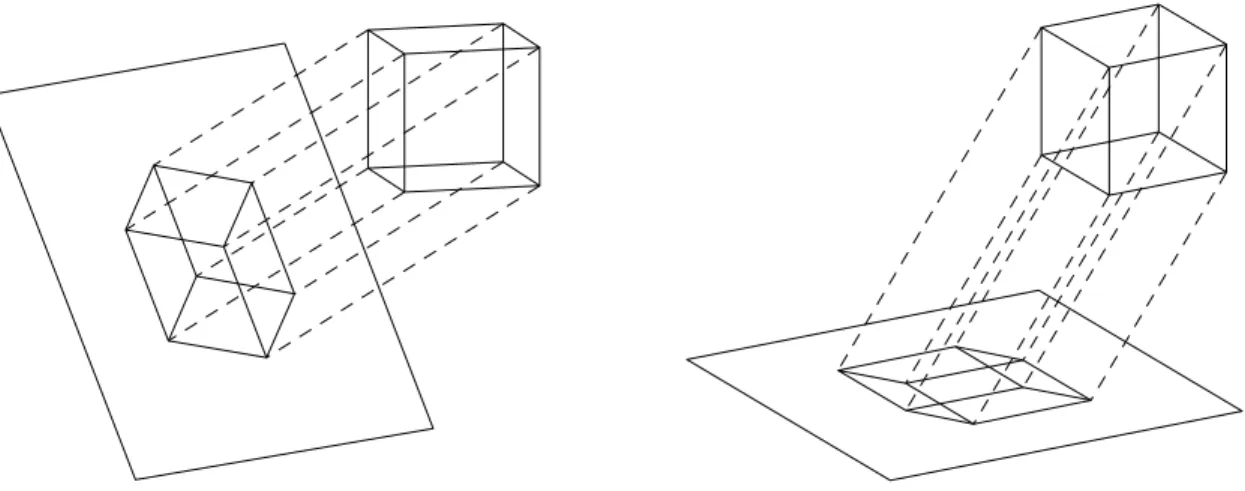
Abbildung

+7


ÄHNLICHE DOKUMENTE
(1) Dörfer brauchen eine klare Grenze zu ihrer Umgebung, damit sie nicht willkürlich in die Landschaft hineinwachsen. Außerdem dient die Begrenzung auch zum
Gegenanzeigen: FeniHydrocort Creme 0,5 % darf nicht angewendet werden bei bekannter Überempfi ndlichkeit gegen den Wirkstoff Hydrocortison oder einen der sonstigen Bestandteile,
Im Finanzplan 2021 – 2025 schreibt die Ge- meinde selbst: «Aufgrund der Investitionen in die Schulliegenschaften werden sich die Auswirkungen ab 2026 auf die Erfolgsrech- nung
Klaas Grensemann und Team geschlossener Kurs.. Dabei erkennt der Mensch, wer er ist. Die Einzelexerzitien bieten Raum für dieses Erken- nen, im Ruhen und im Schweigen, Beten und
Mache eine Skizze, wie viele Kugeln sich in einer Schicht befinden.. Beginne
[r]
Bei der Betrachtung der in Rede stehenden Verteilung der Ebenen der optischen Achsen von vorn erscheinen diese Ebenen übereinand er gelagert (Fig. Bei einem Blick auf die
erscheinen die Achsenebenen für die verschiedenen Lichtsorten dann ü ber- einander, und natürlich fallen auch die in der Symmetrieebene liegenden Mittellinien (es können erste
