Nicht abiturrelavante Ergänzung zu Elektro- und Hybridfahrzeuge
TGU J2
Autor Thomas Geisler
Inhaltsverzeichnis
4 Vier-Quadranten-Betrieb...1
4.1 Technische Umsetzung Rekuperation (optionale Wiederholung/Weiterführung)...1
5 Ersatz der GM durch eine DSM am Wechselrichter...9
5.1 Wirkprinzip der permanenterregten DSM – Drehfelderzeugung mittels Drehstrom...9
5.2 Drehfelderzeugung mittels Wechselrichter – Betrachtung ohne Läufer...9
5.3 DSM am Wechselrichter - Betrachtung mit Läufer...12
6 Anhang - Vertiefung Drehfelderzeugung...14
6.1 Drehfelderzeugung bei DSM in Dreieckschaltung und Blockkommutierung...15
6.2 Drehfelderzeugung bei DSM in Sternschaltung und Blockkommutierung...16
4 Vier-Quadranten-Betrieb
4.1 Technische Umsetzung Rekuperation (optionale Wiederholung/Weiterführung)
In den folgenden Ausführung zur technischen Umsetzung der Energierückgewinnung beim Bremsen (= Rekuperation) werden Inhalte der LPE 9 (Elektromobilität) wiederholt. Die Darstellung hier erfolgt jedoch mit einem alternativen 1-Schaltermodell der Leistungselektronik anhand einer konkreten Fahrsituation. Erst in einem zweiten Schritt wird der mechanische Umschalter durch reale Leistungshalbleiter ersetzt. Durch die gewählte Betrachtungsweise im Schaltermodell ergibt sich direkt der Hochsetz-Tiefsetzsteller, ohne Notwendigkeit den Hochsetz-Tiefsetzsteller aus den Bauelementen des realen Hochsetzstellers und des Tiefsetzstellers zusammensetzen zu müssen.
Die reale Schaltungstechnik wird hier zwar erwähnt, steht jedoch nicht im Vordergrund.
4.1.1 Anmerkung: Ideale Spule an geschalteter Gleichspannung
Für die Funktion der Leistungselektronik ist es ausreichend die stromglättende Wirkung der idealen Spule an geschalteter Gleichspannung durch diese Gleichung zu beschreiben:
ΔI Δt=UL
L
Die allgemeinere Darstellung I˙(t)=1
L⋅UL(t) ermöglicht jedoch eine Brücke zur Mathematik und fördert die Vorstellung, dass die Steigung des Spulenstromes gleich der Spulenspannung ist, bzw. der Spulenstrom gleich der Fläche unter der Spulenspannungsfunktion. Der Anfangswert des Spulenstromes ist dabei unbestimmt. Dies zu akzeptieren, stellt für die Schüler ein geringeres Problem dar, sobald die Brücke zu Integral-/Differentialrechnung hergestellt ist.
Hinweis: Genauer betrachtet hat der Spulendraht auch einen Widerstand. Dann besteht der Stromverlauf nicht mehr aus Geradenabschnitten, sondern aus Abschnitten einer e-Funktion. Wir benötigen jedoch diese genauere Betrachtensweise hier nicht.
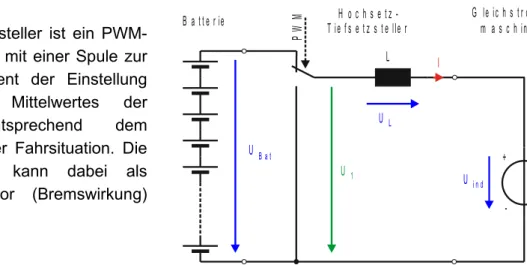
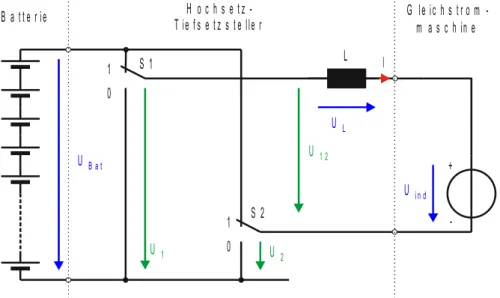
4.1.2 Schaltermodell des Hochsetz-Tiefsetzstellers Ein Hochsetz-Tiefsetzsteller ist ein PWM-
getakteter Umschalter mit einer Spule zur Stromglättung. Er dient der Einstellung des erforderlichen Mittelwertes der Motorspannung entsprechend dem Fahrerwunsch und der Fahrsituation. Die Gleichstrommaschine kann dabei als Motor und Generator (Bremswirkung) betrieben werden.
Der hier benutzte mechanische
Umschalter ist in Wirklichkeit ein elektronischer Schalter (z. B. NPN-Transistor + Diode). Zur Verdeutlichung des Prinzips bleiben wir aber zunächst beim mechanischen Schalter.
Abbildung 4.1: Schaltermodell Hochsetz-Tiefsetzsteller.
H o c h s e t z - T ie f s e t z s t e lle r
G le ic h s t r o m - m a s c h in e
U B a t
U 1 U i n d
U L B a t t e r ie
+
-
L I
PWM
4.1.3 Liniendiagramme des Hochsetz-Tiefsetzstellers während einer Fahrt
Erklärt wird das Prinzip an einem Batterieelektrischen Fahrzeug mit den folgenden Daten:
vmax = 150 km/h @ Uind = 360 V, UBat = 360 V, L = 144 µH, RAnker → 0 Ω (deshalb UKl = Uind !)
Anmerkung: Alle Angaben sind realistisch. Die Induktivität der Spule wurde allerdings relativ gering gewählt, um einen gut sichtbare Schwankung des Klemmenstromes zu erhalten.
Fahrbeispiel 1: Motorische Fahrt mit v = 60 km/h und PMotor = 3,6 kW
Entsprechend dem hier gewählten Tastgrad ti/T = 2/5 stellt sich ein Mittelwert der Spannung über dem Schalter von U1M = 2/5 · 360 V = 144 V ein. Da Uind proportional zur Drehzahl bzw.
Fahrgeschwindigkeit ist, und Uind bei der maximalen Fahrgeschwindigkeit bekannt ist, lässt sich auch Uind berechnen: Uind = 2/5 · 360 V = 144 V. Uind ist konstant, da das Fahrzeug gleichförmig fährt.
Die Spannung an der Spule ergibt sich durch Differenzbildung: UL=U1−Uind Die Steigung des Spulenstroms ergibt sich nach: ΔI
Δt=UL L
Man sieht: Der Spulenstrom schwankt zwischen 10 A und 40 A um den stabilen Mittelwert von 25 A. Es liegt ein sogenannter stationärer („stabiler“) Fahrzustand vor. Dies liegt offensichtlich daran, dass Uind und U1M gleich groß sind.
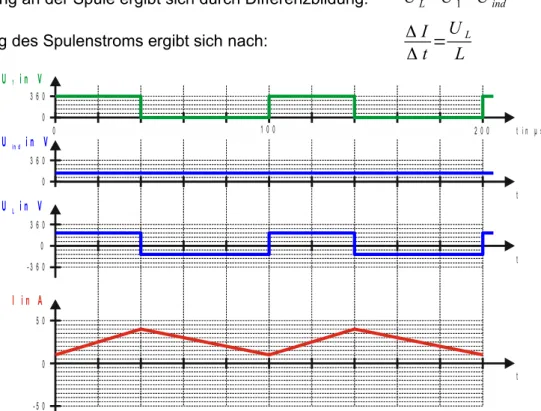
Fahrbeispiel 2: Bremsen bei v = 60 km/h und PMotor = 3,6 kW
Der im folgenden Liniendiagramm dargestellte Bremsbetrieb unterscheidet sich vom Motorbetrieb aus Fahrbeispiel 1 nur durch das Vorzeichen des Spulenstroms. Auch hier liegt ein stationärer Fahrzustand vor. Der Mittelwert des Spulenstroms ist konstant und negativ. Der Motor wirkt als
Abbildung 4.2: Liniendiagramme Hochsetz-Tiefsetzsteller, Fahrtbeispiel 1 (Motorbetrieb).
0
0
0
0 3 6 0
3 6 0
3 6 0
5 0
- 5 0 - 3 6 0
U i n V1
U in d i n V
I i n A
0 1 0 0 2 0 0 t i n µ ss
t
t
t
U i n VL
Generator und speist in die Batterie zurück. Doch wie verstellt man den Anfangswert des Spulenstroms vom positiven Motor- in den negativen Generatorbereich?
Fahrbeispiel 3: Übergang Motor- in Bremsbetrieb bei v = 60 km/h
Durch ein kurzzeitiges Verringern des Tastgrads fällt der Strom länger ab und steigt kürzer an, verglichen mit dem Fahrbeispiel 1. In der Folge sinkt der Mittelwert des Spulenstroms ab und es erfolgt der Übergang vom Motorbetrieb in den Bremsbetrieb.
Die Steigungen des Spulenstroms sind gleich wie in Fahrbeispiel 1.
Auch Uind ist gleich wie in Fahrbeispiel 1, da sich die Fahrgeschwindigkeit innerhalb weniger PWM- Perioden (einige ms) nicht ändern kann.
Abbildung 4.3: Liniendiagramme Hochsetz-Tiefsetzsteller, Fahrtbeispiel 2 (Bremsbetrieb).
0
0
0
0 3 6 0
3 6 0
3 6 0
5 0
- 5 0 - 3 6 0
U i n V1
U in d i n V
I i n A
0 1 0 0 2 0 0 t i n µ ss
t
t
t
U i n VL
Abbildung 4.4: Liniendiagramme Hochsetz-Tiefsetzsteller, Fahrtbeispiel 3.
0
0
0
- 5 0 3 6 0
3 6 0
3 6 0
0 5 0 - 3 6 0
U i n V1
U in d i n V
I i n A
0 1 0 0 2 0 0 t i n µ ss
t
t
t
U i n VL
4.1.4 Aufgaben Hochsetz-Tiefsetzsteller
Gegeben ist ein Batterieelektrisches Fahrzeug mit den unter 4.1.3 genannten Daten.
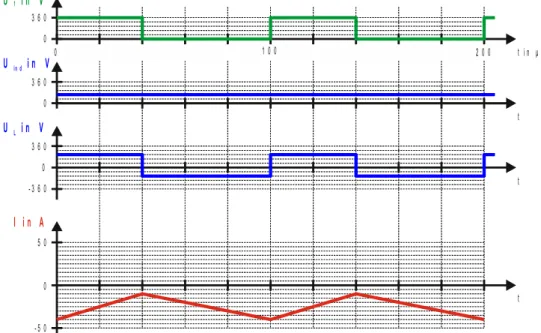
a) Ermitteln Sie die Frequenz der PWM im Liniendiagramm Abbildung 4.2.
b) Kontrollieren Sie, ob der Stromverlauf in Abbildung 4.2 korrekt wiedergegeben ist.
c) Ergänzen Sie im Liniendiagramm des Spulenstromes Abbildung 4.2 den Stromverlauf für eine Induktivität der Spule von 200 mH.
d) Beschreiben Sie allgemein, welchen Stelleingriff man vornehmen muss, um vom Bremsbetrieb in den Motorbetrieb zu kommen.
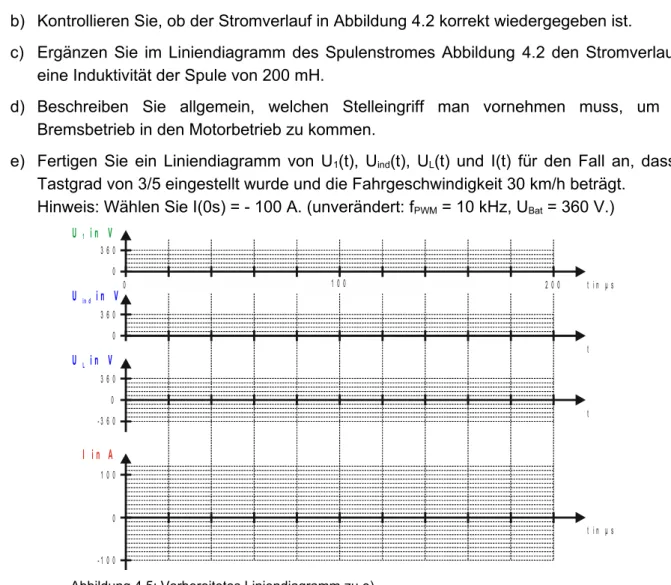
e) Fertigen Sie ein Liniendiagramm von U1(t), Uind(t), UL(t) und I(t) für den Fall an, dass ein Tastgrad von 3/5 eingestellt wurde und die Fahrgeschwindigkeit 30 km/h beträgt.
Hinweis: Wählen Sie I(0s) = - 100 A. (unverändert: fPWM = 10 kHz, UBat = 360 V.)
f) Wie verhält sich das Fahrzeug in der Teilaufgabe e)?
g) Nennen Sie 2 verschiedene Möglichkeiten, die Schwankungsbreite des Spulenstroms zu verringern.
4.1.5 Lösung zu 4.1.4
a) f =1/T=1/100µs=10kHz b) Anstieg: ΔI
Δt=UL
L =3/5⋅360V
144µH = 216V
144µH=1,5⋅106A/s=30A
20µs → Abb. korrekt Abfall: ΔI
Δt=UL
L =−2/5⋅360V
144µH =−144V
144µH =−1⋅106A/s=−20A
20µs → Abb. korrekt c) Anstieg: ΔI
Δt=UL
L =3/5⋅360V
200mH = 216V
200mH=1080A/s=21,6mA 20µs
Abbildung 4.5: Vorbereitetes Liniendiagramm zu e).
0
0
0
0 3 6 0
3 6 0
3 6 0
1 0 0
- 1 0 0 - 3 6 0
U i n V1
U in d i n V
I i n A
0 1 0 0 2 0 0 t i n µ ss
t
t
t i n µ s
U i n VL
Da die Stromstärke innerhalb von 20 µs nur um 21,6 mA ansteigt, ist die Stromschwankung im gewählten Maßstab nicht mehr sichtbar. Das Liniendiagramm des Spulenstromes ist also die gestrichtelte „Waagrechte“.
d) Man muss den Tastgrad kurzzeitig erhöhen, bis sich ein positiver Motorstrom ergibt.
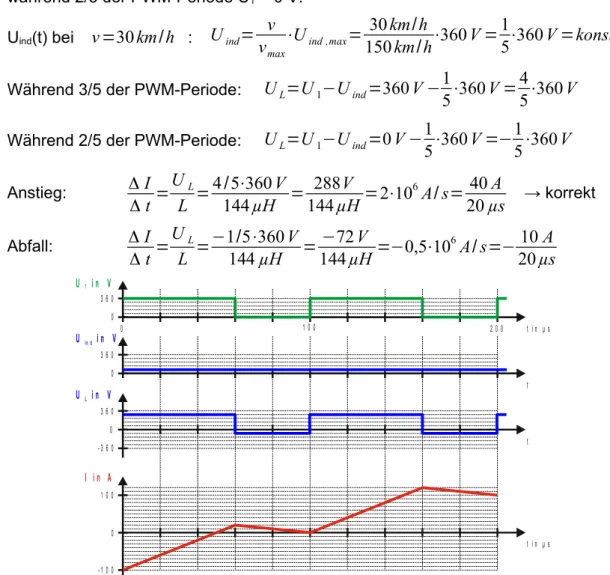
e) Während 3/5 der PWM-Periode U1 = UBat = 360 V, während 2/5 der PWM-Periode U1 = 0 V.
Uind(t) bei v=30km/h : Uind= v
vmax⋅Uind ,max= 30km/h
150km/h⋅360V=1
5⋅360V=konst.
Während 3/5 der PWM-Periode: UL=U1−Uind=360V−1
5⋅360V=4 5⋅360V Während 2/5 der PWM-Periode: UL=U1−Uind=0V−1
5⋅360V=−1 5⋅360V Anstieg: ΔI
Δt=UL
L =4/5⋅360V
144µH = 288V
144µH=2⋅106A/s= 40A
20µs → korrekt
Abfall: ΔI
Δt=UL
L =−1/5⋅360V
144µH =−72V
144µH=−0,5⋅106A/s=−10A 20µs
f) Das Fahrzeug beschleunigt.
g) Erhöhen der Glättungsspulen-Induktivität → geringere Stromanstiegsgeschwindigkeit (bzw.
Abfallgeschwindigkeit). Erhöhen der PWM-Frequenz → kürzerer Anstieg/Abfall.
Abbildung 4.6: Lösung zu c).
0 5 0
- 5 0
I i n A
0 1 0 0 2 0 0 t i n µ s
Abbildung 4.7: Liniendiagramm zu e).
0
0
0
0 3 6 0
3 6 0
3 6 0
1 0 0
- 1 0 0 - 3 6 0 U i n V1
Uin d i n V
I i n A
0 1 0 0 2 0 0 t i n µ ss
t
t
t i n µ s U i n VL
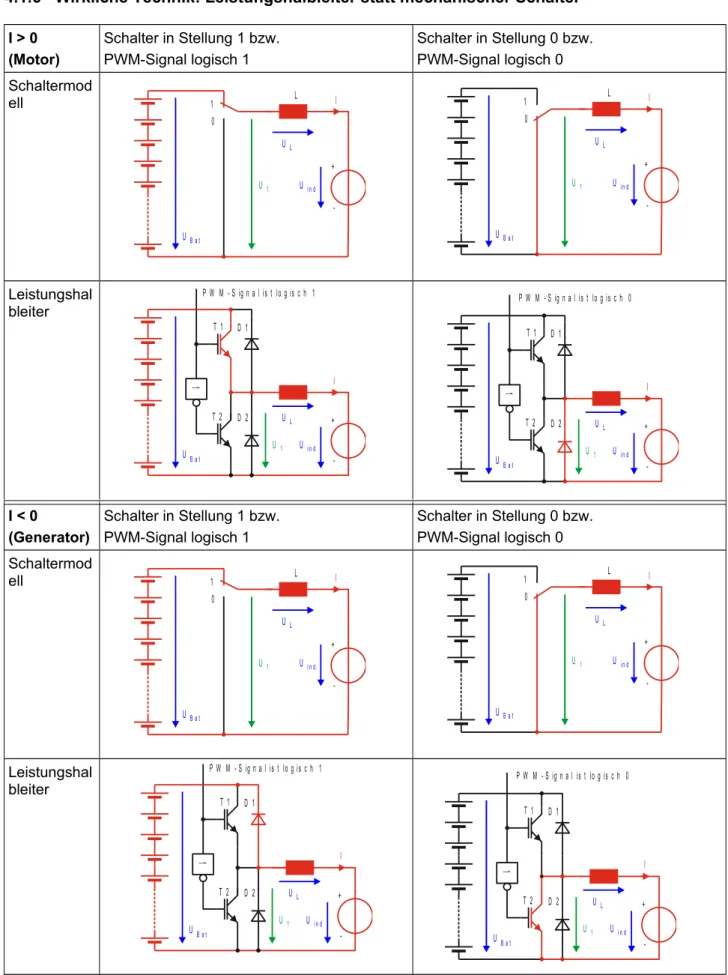
4.1.6 Wirkliche Technik: Leistungshalbleiter statt mechanischer Schalter
I > 0 (Motor)
Schalter in Stellung 1 bzw.
PWM-Signal logisch 1
Schalter in Stellung 0 bzw.
PWM-Signal logisch 0 Schaltermod
ell
Leistungshal bleiter
I < 0 (Generator)
Schalter in Stellung 1 bzw.
PWM-Signal logisch 1
Schalter in Stellung 0 bzw.
PWM-Signal logisch 0 Schaltermod
ell
Leistungshal bleiter
Tabelle 1: Mechanische Umschalter des Modells ersetzt durch reale Leistungshalbleiter.
UB a t
U1 Ui n d
UL +
-
L I
1 0
UB a t
U1 Ui n d
UL +
-
L I
1 0
UB a t U1 Ui n d
UL +
- P W M - S ig n a l is t lo g is c h 1
1 I
T 1
T 2 D 1
D 2
UB a t U1 Ui n d
UL +
- P W M - S ig n a l is t lo g is c h 0
1 I
T 1
T 2 D 1
D 2
UB a t
U1 Ui n d
UL +
-
L I
1 0
UB a t
U1 Ui n d
UL +
-
L I
1 0
UB a t U1 Ui n d
UL +
- P W M - S ig n a l is t lo g is c h 1
1 I
T 1
T 2 D 1
D 2
UB a t U1 Ui n d
UL +
- P W M - S ig n a l is t lo g is c h 0
1 I
T 1
T 2 D 1
D 2
4.1.7 Übergang Zwei-Quadranten-Betrieb → Vier-Quadranten-Betrieb
Um nicht nur beide Vorzeichen des Klemmenstroms zu ermöglichen sondern auch beide Vorzeichen der Klemmenspannung – also Vorwärts-/Rückwärtsbetrieb – wird ein zusätzlicher Umschalter eingeführt. Der zusätzliche Umschalter aus dem Schaltermodell entspricht einer zusätzlichen Halbbrücke bei der realen technischen Umsetzung mit Leistungshalbleitern (sogenannte H-Brücke, bekannte aus LPE 9).
4.1.8 Aufgaben Hochsetz-Tiefsetzsteller
a) Markieren Sie die stromführenden Bauteile in Tabelle 1 in rot, so dass der geschlossene Motorstromkreis jeweils sichtbar wird. (Dazu wird eine Schwarz-Weiß-Kopie der Tabelle benötigt).
b) Welche der Leistungshalbleiter werden für den Ihnen bereits aus LPE 9 bekannten Tiefsetzsteller benötigt.
c) Hochsetzsteller heißt: Aus einer kleinen Spannung wird eine höhere Spannung gewonnen.
In welchen Feldern derTabelle 1 wird die Hochsetzsteller-Funktion beschrieben? Welche Leistungshalbleiter werden für die Hochsetzsteller-Funktion benötigt?
d) In welchen Quadranten des M(n)-Diagramm kann der in Tabelle 1 gezeigte Hochsetz- Tiefsetzsteller betrieben werden?
e) Erstellen Sie eine Tabelle mit allen möglichen Kombinationen der Schalterstellungen von S1 und S2 in Abbildung 4.8. Geben Sie zu jeder möglichen Kombination die Spannung U12
an.
4.1.9 Lösungen zu 4.1.8 a) Siehe Tabelle 1.
b) Es wird T1 und D2 benötigt. Da T2 und D1 beim reinen Tiefsetzsteller nie Strom führen, kann man sie weglassen.
Abbildung 4.8: Schaltermodell Hochsetz-Tiefsetzsteller für 4-Quadranten-Betrieb.
H o c h s e t z -
T ie f s e t z s t e lle r G le ic h s t r o m -
m a s c h in e
U B a t
U 1
U i n d U L
I B a t t e r ie
+
- L
U 2 U 1 2 S 1
S 2 0 0
1
1
c) In den beiden letzten Zeilen der Tabelle 1 wird die Hochsetzsteller-Funktion beschrieben, die für den Bremsbetrieb benötigt wird. Die entsprechend der Fahrgeschwindigkeit kleine Spannung Uind wird in die größere Batteriespannung hochgesetzt. Für die Hochsetzsteller- Funktion wird D1 und T2 benötigt.
d) Der in Tabelle 1 gezeigte Hochsetz-Tiefsetzsteller kann nur im I. und IV. Quadranten des M(n)-Diagramms arbeiten. Also bei positiven Drehzahlen und damit positiven Spannungen Uind.
e) S2 S1 U
12
0 0 0 V
0 1 + Ubat
1 0 - Ubat
1 1 0 V
5 Ersatz der GM durch eine DSM am Wechselrichter
In der Praxis ist die mechanische Kommutierung in der GM immer auch Verschleiß unterworfen.
Das sogenannte „Kommutatorfeuer“ führt zusätzlich zu elektromagnetischen Störungen. Die sogenannte Drehstrom-Synchronmaschine (DSM) vermeidet diese Nachteile und wird deshalb üblicherweise in Fahrzeugantrieben eingesetzt.
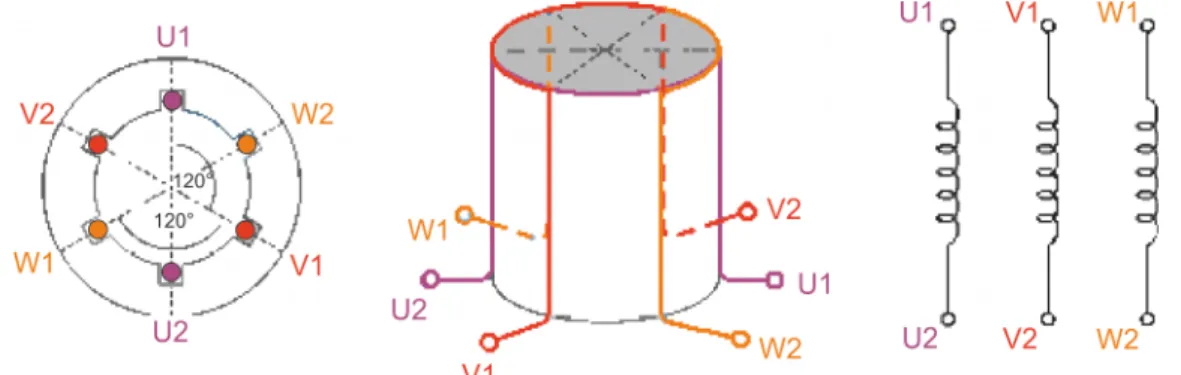
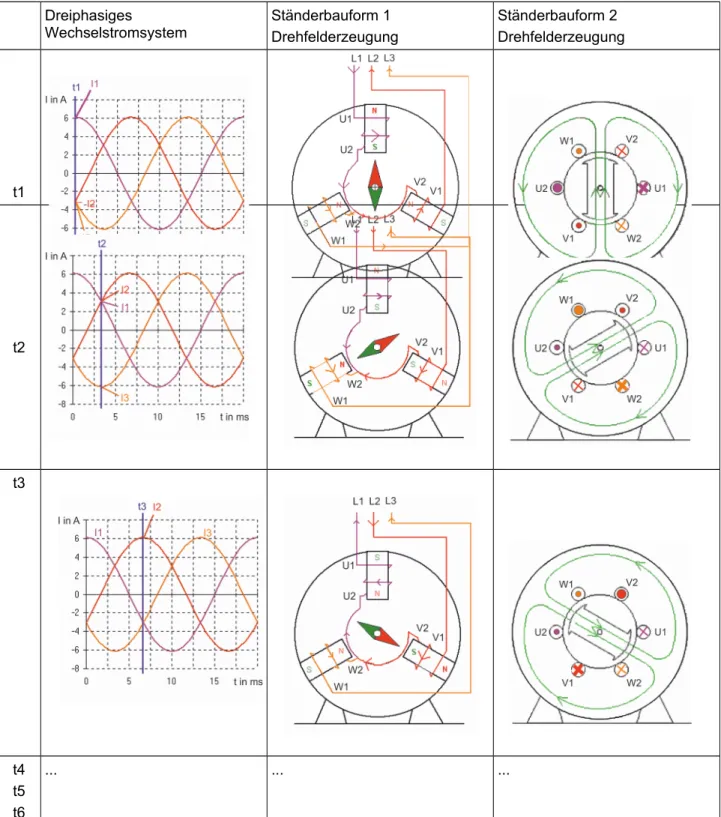
5.1 Wirkprinzip der permanenterregten DSM – Drehfelderzeugung mittels Drehstrom
Ein sich drehendes B-Feld im Stator nimmt den Läufer, der aus einem Permanentmagneten besteht, mit. Ein sich gleichmäßig drehendes B-Feld ergibt sich bei Versorgung dreier Ständerwicklungen, wie sie in Tabelle 2 zu sehen sind, mittels eines 3phasigen Wechselstromsystems, wie es aus LPE 10 bekannt ist. Die Darstellungen in aufeinander folgenden Tabellenzeilen sind jeweils um 60 ° verschoben.
Anmerkung 1: Permanenterregte DSMn setzen sich auch bei größeren Bauformen immer stärker durch, seit entsprechende Magnetmaterialien zu kommerziell interessanten Bedingungen verarbeitbar sind. Teilweise werden größere DSMn jedoch statt mit einem Permanentmagneten mit einer sogenannten Erregerwicklung auf dem Läufer ausgestattet. Zur Versorgung wird dabei ein Erregerstrom über mechanische Schleifkontakte zugeführt.
Anmerkung 2: In Tabelle 2 verlaufen die Windungen der Ständerwicklung senkrecht zur Zeichenebene. Wie dabei die beiden Teilabschnitte einer Wicklung miteinander verbunden sind zeigt die folgende Abbildung:
5.2 Drehfelderzeugung mittels Wechselrichter – Betrachtung ohne Läufer
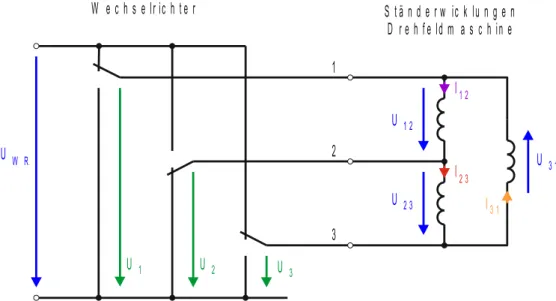
Ein dreiphasiges Wechselstromsystem lässt sich auch mittels eines Wechselrichters (siehe Abbildung 5.2) erzeugen. Der Einfachheit halber besteht unser Modellwechselrichter aus drei Umschaltern. Beim realen Wechselrichter wäre jeder Umschalter wieder durch eine Transistor- Halbbrücke zu ersetzen (sinngemäß wie in Tabelle 1).
Abbildung 5.3 zeigt das Ansteuerschema des Wechselrichters. Es handelt sich dabei um eine sogenannte Blockkommutierung, bei der jeweils 50 % der Periodendauer die Versorgungsspannung ein- bzw. ausgeschaltet wird. Auffällig ist, dass obwohl nur drei Umschalter eingesetzt werden, sich für den Spannungs- bzw. Stromverlauf an den Statorwicklungen schon eine näherungsweise gute Sinusform einstellt.
Abbildung 5.1: Verbindung zwischen den gegenüberliegenden Teilabschnitten einer Wicklung.
Dreiphasiges
Wechselstromsystem
Ständerbauform 1 Drehfelderzeugung
Ständerbauform 2 Drehfelderzeugung
t1
t2
t3
t4 t5 t6
... ... ...
Tabelle 2: Drehfelderzeugung in der DSM bei Versorgung mit dreiphasigem Drehstromsystem.
U12=U1−U2 U23=U2−U3 U31=U3−U1
Abbildung 5.2: Umschaltermodell Wechselrichter mit Ständerwicklungen in Dreieckschaltung.
W e c h s e lr ic h t e r S t ä n d e r w ic k lu n g e n
D r e h f e ld m a s c h in e
U W R
U 1 U 2 U 3
U 1 2
U 2 3
U 3 1 I1 2
I2 3 I3 1 1
2
3
Abbildung 5.3: Liniendiagramm der Größen aus Abbildung 5.2.
0
0
0
0
0 0
0 0
0 UW R
UW R
UW R
UW R
UW R
UW R
- UW R
- UW R
- UW R
U1
U2
U3
U1 2
I1 2
U2 3
I2 3
U3 1
I3 1
0 t1 t2 t3 t4 t5 t6 t7 t8 t9 t1 0 t1 1 t1 2 t
t
t
t
t t
t t
t
Die Läuferwicklungen wurden durch einen ohmschen Widerstand angenähert. Diese Näherung ist dann zulässig, wenn man den Läufer vorher entfernt, damit keine Spannung induziert wird. Dies ist im Moment zulässig, da wir ja nur die Drehfelderzeugung getrennt betrachten.
Anmerkung 3: Der sich im Stator drehende B-Feld-Zeiger („Raumzeiger“) ließe sich aufgrund der Wechselrichteransteuerung – im Gegensatz zur Sinusansteuerung - sehr leicht konstruieren. Die Konstruktion des sich drehenden B-Feld-Zeigers wird im Anhang 6.1 gezeigt.
Anmerkung 4: Würde der Motor nicht in Dreieck- sondern in Sternschaltung mit dem Wechselrichter verbunden, würde sich eine noch bessere Annäherung an die Sinusform ergeben. Allerdings wären aufgrund der sich ergebenden gemischten Schaltung der Wicklungswiderstände die Verhältnisse unübersichtlicher (siehe Anhang 6.2).
5.3 DSM am Wechselrichter - Betrachtung mit Läufer
Bringt man nun den Läufer, der einfach aus einem Dauermagneten besteht, in das Drehfeld ein, so wird er natürlich mitgenommen. Allerdings induziert der rotierende Läufer in den Statorwicklungen auch eine Spannung, die genau wie bei der GM, proportional zur Drehzahl ist.
Es handelt sich dabei in jedem Fall um eine Wechselspannung. Der zeitlicher Verlauf der induzierten Spannung ist abhängig von der genauen Geometrie des magnetischen Kreises. Er soll jedoch hier nicht genauer betrachtet werden.
Wir nehmen nun – wie bei der bisher benutzten GM – an, dass der Wicklungswiderstand sehr klein ist bzw. gegen Null geht. Wenn also nicht ein betragsmäßig sehr großer bzw. gegen Unendlich strebender Strom zur Drehfelderzeugung in die DSM fließen soll, muss die Versorgungsspannung ungefähr gleich der induzierten Spannung sein. Da die induzierte Spannung proportional zur Drehzahl ist, muss also auch die Versorgungsspannung proportional zur Drehzahl verstellt werden.
Diese Spannungsverstelllung geschieht hier durch den bereits für die Ansteuerung der GM verwendeten Hochsetz-Tiefsetzsteller.
Folgerung: Die GM kann gleichwertig ersetzt werden durch eine DSM am blockkommutierten Wechselrichter. Dies gilt für die oben gemachte Näherung vernachlässigbarer Wicklungswiderstände.
I12=U12/RWicklung I23=U23/RWicklung I31=U31/RWicklung
B a t t e r ie
B a t t e r ie
H o c h s e t z - T ie f s e t z -
S t e lle r
H o c h s e t z - T ie f s e t z -
S t e lle r
W e c h s e l- r ic h t e r
G M
D S M
Anmerkung 5: Die Zerlegung der Leistungselektronik in Hochsetz-Tiefsetzsteller und blockkommutierten Wechselrichter dient der didaktischen Reduktion. Eine ähnliche Zerlegung erfolgte bei der Darstellung des Solarwechselrichters. Reale Wechselrichter arbeiten in der Regel nicht mit Block- sondern PWM-Kommutierung. Damit wird auch die Funktion der Spannungsverstellung vom Wechselrichter übernommen. Auf den vorgelagerten Hochsetz- Tiefsetzsteller wird dann verzichtet.
Anmerkung 5: Nicht eingegangen wird hier auf die Regelungstechnik, die in der Praxis eine wichtige Rolle spielt. Z. B. muss die Drehfelderzeugung immer mit der „richtigen“ Frequenz erfolgen. Die Frequenz stimmt dann, wenn der Läufer in der konkreten Antriebssituation dem Drehfeld synchron folgt mit weniger wie +/- 90 ° Phasenversatz. Ansonsten würde das Antriebsmoment „wegkippen“. Man kann dazu z. B. die Drehfeldfrequenz vorgeben und den Strom durch die PWM so einstellen, dass der Läufer im erlaubten Phasenbereich mitläuft. In der Praxis ist das jedoch nicht unter allen Umständen möglich. Deshalb ist im Läufer nicht nur ein Permanentmagnet, sondern im Allgemeinen auch noch ein Kurzschlussläufer, angeordnet der auch im asynchronen Betriebsfall ein Drehmoment liefert. D. h. die DSM ist häufig gleichzeitig eine Drehstrom-Asynchronmaschine (DAM).
Abbildung 5.5: Beispielhafter Vergleich der M(n)-Kennlinien von GM und DSM.
0 2000 4000 6000 8000 10000 12000 14000
0 50 100 150 200 250 300
M(n)-Kennlinien
n in min-1
M in Nm
Scharparameter GM: UKL Scharparameter DSM: f, UKL
GM: UKL steigt DSM: f, UKLsteigt
6 Anhang - Vertiefung Drehfelderzeugung
Hier im Anhang werden exemplarisch Möglichkeiten gezeigt, die Drehfelderzeugung in der Drehfeldmaschine wirklich lückenlos und detailliert darzustellen, sowie auf mögliche Fallstricke aufmerksam zu machen. In den Darstellungen des Kapitels 5.2 Drehfelderzeugung mittels Wechselrichter – Betrachtung ohne Läufer (insbesondereTabelle 2, Abbildung 5.2, 5.3) wurde das Prinzip der Drehfelderzeugung bereits erklärt.
Dreieckschaltung
Abbildung 6.1 zeigt das B-Feld, wie es aus der getrennten Bestromung einer jeden Ständerwicklung resultiert. Werden die Ständerwicklungen in Dreieckschaltung an den Wechselrichter angeschlossen und der Wechselrichter blockkommutiert gemäß den Liniendiagrammen Abbildung 5.3, dann ergeben sich zu sechs verschiedenen äquidistanten Zeitpunkten die Stromstärken und B-Feld-Zeiger der Tabelle 3. In Tabelle 3 ist zu sehen, wie der resultierende B-Feld-Zeiger Bres aus den B-Feld-Zeigern der einzelnen Wicklungen (B1, B2, B3) zusammengesetzt wird und in gleichmäßigen 60 °-Sprüngen gegen den Uhrzeigersinn rotiert.
Sternschaltung
Abbildung 6.2 zeigt die Ständerwicklungen in Sternschaltung mit dem Wechselrichter verbunden.
Mittels der gemischten Schaltungen in Tabelle 3 werden die sich ergebenden Strangspannungen bei Blockkommutierung ermittelt. Abbildung 6.3 zeigt nun das Liniendiagramm aller Spannungen und Ströme in Sternschaltung.
Didaktische Anmerkungen
Es fällt auf, dass sich bei der Sternschaltung eine gegenüber der Dreieckschaltung deutlich verbesserte Sinusform einstellt. Allerdings lässt sich das glaubhaft nur darstellen mittels der sich je nach Schalterstellung ergebenden gemischten Schaltungen aus drei Strangwiderständen (Tabelle 4). Dies ist aus Sicht der Schülerinnen und Schüler sicher eine sehr abstrakte und schwer nachvollziehbare Darstellung. Die Aufnahme in die Handreichung erfolgte in der Absicht diesen Problemgehalt bewusst zu machen.
Die Strangwicklungen sind bei allen Darstellungen hier durch ihre ohmschen Kupferwiderstände angenähert. Es sei darauf hingewiesen, dass bei anderen Annäherungen (z. B. rein induktiv) sich je nach Schaltung (Stern oder Dreieck) nicht immer ein gleichmäßig rotierender B-Feld-Zeiger ergibt!
Natürlich soll der B-Feld-Zeiger möglichst keine Sprünge machen, sondern kontinuierlich rotieren.
Deshalb ersetzt in der Praxis die PWM-Kommutierung, wie in LPE 14 (Photovoltaik) bereits erarbeitet, die hier aus didaktischen Gründen benutzte einfachere Blockkommutierung. Eine weitere Sichtweise auf die PWM-Kommutierung bei dreiphasigen Wechselrichtern wäre hier das sogenannte Raumzeigerverfahren. Beim Raumzeigerverfahren wird immer zwischen zwei benachbarten Ansteuerzuständen der drei Schalter hin- und hergeschaltet, so dass sich der resultierende B-Feld-Zeiger (= Raumzeiger) nicht nur in 60 °-Schritten, sondern beliebig verstellen lässt.
6.1 Drehfelderzeugung bei DSM in Dreieckschaltung und Blockkommutierung
0 < t ≤ t1
I12 = + Imax
I23 = - Imax
I31 = 0
⃗Bres=1⋅ ⃗B1−1⋅ ⃗B2+0⋅ ⃗B3
t3 < t ≤ t4
I12 = - Imax
I23 = + Imax
I31 = 0
⃗Bres=−1⋅⃗B1+1⋅ ⃗B2+0⋅ ⃗B3
t1 < t ≤ t2
I12 = + Imax
I23 = 0 I31 = - Imax
⃗Bres=1⋅ ⃗B1+0⋅ ⃗B2−1⋅ ⃗B3
t4 < t ≤ t5
I12 = - Imax
I23 = 0 I31 = + Imax
⃗Bres=−1⋅⃗B1+0⋅ ⃗B2+1⋅ ⃗B3
t2 < t ≤ t3
I12 = 0 I23 = + Imax
I31 = - Imax
⃗Bres=0⋅ ⃗B1+1⋅ ⃗B2−1⋅ ⃗B3
t5 < t ≤ t6
I12 = 0 I23 = - Imax
I31 = + Imax
⃗Bres=0⋅ ⃗B1−1⋅ ⃗B2+1⋅ ⃗B3
Tabelle 3: Der rotierende B-Feld-Zeiger konstruiert aus den Stromverläufen der Abbildung 5.3.
Abbildung 6.1: Jede der 3 Wicklungen getrennt bestromt.. Der rotierende B-Feld-Zeiger ergibt sich aus der Überlagerung der Beträge dieser drei Wicklungen.
B1
2B 3B
I = + I1 2 m a x I = + I2 3 m a x I = + I3 1 m a x
Br e s
Br e s
Br e s
Br e s
Br e s Br e s
Br e s
Br e s
Br e s
Br e s
Br e s Br e s
6.2 Drehfelderzeugung bei DSM in Sternschaltung und Blockkommutierung
0 < t ≤ t1
U1S=+ 1 3⋅UWR U2S=−2
3⋅UWR U3S=+ 1
3⋅UWR
t3 < t ≤ t4
U1S=−1 3⋅UWR U2S=+ 2
3⋅UWR U3S=−1
3⋅UWR
t1 < t ≤ t2
U1S=+ 2 3⋅UWR U2S=−1
3⋅UWR U3S=−1
3⋅UWR
t4 < t ≤ t5
U1S=−2 3⋅UWR U2S=+ 1
3⋅UWR U3S=+ 1
3⋅UWR
t2 < t ≤ t3
U1S=+ 1 3⋅UWR U2S=+ 1
3⋅UWR U1S=−2
3⋅UWR
t5 < t ≤ t6
U1S=−1 3⋅UWR U2S=−1
3⋅UWR U3S=+ 2
3⋅UWR
Tabelle 4: Ermittlung der Strangspannungen in Sternschaltung.
Abbildung 6.2: Umschaltermodell Wechselrichter mit Ständerwicklungen in Sternschaltung.
W e c h s e lr ic h t e r S t ä n d e r w ic k lu n g e n
D r e h f e ld m a s c h in e
U W R
U 1 U 2 U 3
U 1 S
U 2 S
U 3 S I1
I2
I3 1
2 S
3
R R
R U B a t
U 1 S
U 2 S
U 3 S R
R R
U B a t
U2 S
U 1 S U 3 S
S
R
R R
UB a t
U 1 S
U2 S U3 S
S
R R
R UB a t
U 2 S
U1 S U 3 S
S
R R
R U B a t
U 1 S
U 3 S U 2 S
S
R
R R
U B a t
U3 S
U 1 S U 2 S
S
Aus den drei Stromverläufen der Abbildung 6.3 lässt sinngemäß, wie unter Kapitel 6.1 für die Dreieckschaltung gezeigt, der rotierende B-Feld-Zeiger konstruieren.
I1=U1S/RWicklung I2=U2S/RWicklung I3=U3S/RWicklung
Abbildung 6.3: Liniendiagramm der Größen aus Abbildung 6.2.
0
0
0
0
0 0
0 0
0 UW R
UW R
UW R
UW R
UW R
UW R
- UW R
- UW R
- UW R
U1
U2
U3
U1 S
I1
U2 S
I2
U3 S
I3
0 t1 t2 t3 t4 t5 t6 t7 t8 t9 t1 0 t1 1 t1 2 t
t
t
t
t t
t t
t
Ermittlung der Strangspannung en gemäß Tabelle 4.