Fixpunkts¨atze und ihre Anwendung in der Spieltheorie
Nikola Broussev
29. April 2008
Inhaltsverzeichnis
1 Motivation 3
2 Einf¨uhrung 5
2.1 Fixpunkte . . . 5 2.2 Retrakte und Retraktionen . . . 6
3 Der Fixpunkts¨atz von Brouwer 8
3.1 Simplices und baryzentrische Koordinaten . . . 8 3.2 Die Simpliziale Zerlegung und das Lemma von Sperner . . . . 11 3.3 Der Fixpunktsatz von Brouwer . . . 13 4 Die Fixpunkts¨atze von Schauder and Kakutani 18 4.1 Der Fixpunktsatz von Schauder . . . 18 4.2 Der Fixpunktsatz von Kakutani . . . 20
5 Anwendungen 22
5.1 Arbeitslemma ¨uber den Brouwer-Fixpunktsatz . . . 22 5.2 Nash-Gleichgewicht ¨uber den Kakutani-Fixpunktsatz . . . 23
1 Motivation
Definition 1.1 (Entscheidungsregeln). Eine Entscheidungsregel f¨ur Erich ist eine mengenwertige Funktion, die f¨ur jede Entscheidung von Franz eine Menge von Entscheidungen f¨ur Erich definiert:
CE :F → P(E)
Analog ist eine Entscheidungsregel f¨ur Franz eine mengenwertige Funktion, die f¨ur jede Entscheidung von Erich eine Menge von Entscheidungen f¨ur Franz definiert:
CF :E → P(F)
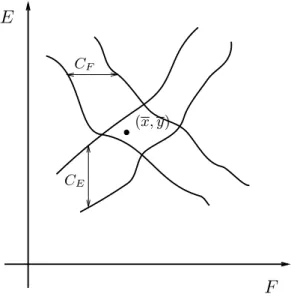
Definition 1.2 (Konsistente Paaren von Entscheidungen). Ein Paar von Entscheidungen (x, y)∈E×F wird konsistent genannt wenn
x∈CE(y) und y∈CF(x) gilt. (Siehe Abbildung 1.)
Bemerkung 1.3. Falls wir folgende Funktion auf E×F definieren C:=
E×F → P(E)× P(F) =P(E×F) C(x, y) =CE(y)×CF(x)
k¨onnen wir die Konsistenz folgendermaßen formulieren.
(x, y)∈C(x, y)
Bemerkung 1.4. Hier ist es ersichtlich die Wichtigkeit eines Satzes, der unter gewissen Bedingungen die Existenz eines Punktes z ∈A sichert, so dass f¨ur mengenwertigen Funktionen G:A→ P(A), folgende Bedingung erf¨ullt ist
z ∈G(z).
So ein Satz g¨abe uns die Bedingungen die ¨aquivalent zur Existenz eines kon- sistenten Paares von Entscheidungen sind. Im folgenden Kapiteln werden wir uns mit diesen, so genannten Fixpunkts¨atzen, besch¨aftigen.
Abbildung 1: Konsistente Paaren von Entscheidungen
F E
CE
CF
(x, y)
Bemerkung 1.5. Bei endliche Mengen von Entscheidungen E = {1, . . . , n}
k¨onnen wir das so genannteregul¨aren (n−1)-dimensionale Simplex von Rn betrachten
Mn:={x∈Rn+:
n
X
i=1
xi = 1}
und E in Mn folgendermaßen einbetten δ:=
E →Mn
δ(i) =ei := (0, . . . ,1, . . . ,0).
Indem man xi als die Wahrscheinlichkeit mit der Entscheidung i getroffen wird betrachtet, kann man x ∈ Mn\E als eine nicht deterministische Ent- scheidung deuten. Da viele Behauptungen ¨uber Fixpunkte Konvexit¨at ver- langen und durch Zulassen von nicht deterministische Entscheidungen wir die ganze Menge Mn, die eine konvexe kompakte Teilmenge von Rn ist, be- trachten k¨onnen, kann man st¨arkere Behauptungen ¨uber die Existenz von Fixpunkten zeigen.
2 Einf¨ uhrung
In diesem Kapitel werde ich zuerst formale Definitionen von Fixpunkt, Fixpunkt- Eigenschaft, Retrakt angeben. Danach werde ich die ¨Ubertragbarkeit von der Fixpunkt-Eigenschaft auf hom¨oomorphe topologische R¨aume zeigen. Zum Schluss zeige ich, dass abgeschlossene konvexe Teilmengen Retrakte sind und dass Retrakte auch die Fixpunkt-Eigenschaft von dem Raum, in dem sie ent- halten sind, vererben.
2.1 Fixpunkte
Definition 2.1 (Fixpunkt). Sei X eine Menge und f :X →X eine Abbil- dung. Ein Element x∈X heißt Fixpunkt von f, wenn f(x) =x.
Definition 2.2 (Fixpunkt-Eigenschaft). Sei (X,X) ein topologischer Raum.
Wir sagen (X,X) hat die Fixpunkt-Eigenschaft, wenn gilt:
∀f :X →X, f stetig⇒f hat einen Fixpunkt.
Beispiel 2.3. Das Intervall [0,1]⊂Rhat die Fixpunkt-Eigenschaft. Dies sieht man, indem man f¨ur eine gegebene stetige Funktionf : [0,1]→[0,1] die neue Funktion g(x) := f(x)−x betrachtet. Dann gilt n¨amlich g(0) = f(0) ≥ 0 und g(1) = f(1) −1 ≤ 0, und nach dem Mittelwertsatz folgt die Existenz eines Punktes ξ ∈[0,1] mit 0 = g(ξ) =f(ξ)−ξ, also f(ξ) = ξ.
Proposition 2.4. Seien(X,X)und(Y,Y)hom¨oomorphe topologische R¨aume.
Hat (X,X) die Fixpunkt-Eigenschaft, dann hat auch (Y,Y) die Fixpunkt- Eigenschaft.
Beweis. Sei hein Hom¨oomorphismus von X nachY. Betrachten wir f¨ur eine stetige Funktionf :Y →Y, die wohldefinierte stetige Funktionh−1◦f ◦h: X → X. Diese hat laut Voraussetzung einen Fixpunkt den wir mit x ∈ X bezeichnen. Dann ist h−1(f(h(x))) = x, also folgt f(h(x)) = h(x), und f¨ur die Funktion f ist der Punkt y:=h(x)∈Y ein Fixpunkt.
Beispiel 2.5. Das Intervall [a, b] ⊂ R hat die Fixpunkt-Eigenschaft. Denn h(x) := (b−a)x+a ist ein Hom¨oomorphismus von [0,1] nach [a, b], und das Interval [0,1] hat nach Beispiel 2.3 die Fixpunkt-Eigenschaft.
2.2 Retrakte und Retraktionen
Definition 2.6 (Retrakt). Sei (X,X) ein topologischer Raum. Ein Unter- raum (U,XU) heißt Retrakt von (X,X), wenn es eine stetige Abbildung r :X→U gibt, sodass
∀x∈U :r(x) = x Hier heißt r Retraktion.
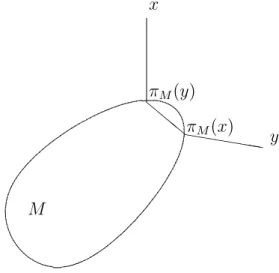
Proposition 2.7. Sei (H,k k) ein Hilbertraum, M ⊆ H eine nichtleere, abgeschlossene und konvexe Menge. Dann gilt f¨ur die Konvexe Projektion πM :H →M Folgendes (siehe Abbildung 2)
1. ∀x∈H,∀m∈M :hx−πM(x), m−πM(x)i ≤0 2. ∀x, y ∈H :kπM(x)−πM(y)k ≤ kx−yk
Beweis.
1. Angenommen hx−πM(x), m−πM(x)i > 0. Das bedeutet wir k¨onnen ein λ ∈(0,1) finden sodass
0< λ < 2hx−πM(x), m−πM(x)i kπM(x)−mk2 gilt. Sei jetzt m∈M. Wir haben
kx−(λm+ (1−λ)πM(x))k2 =
=kx−πM(x)k2−2λhx−πM(x), m−πM(x)i+λ2kπM(x)−mk2 =
=kx−πM(x)k2 −λ(2hx−πM(x), m−πM(x)i −λkπM(x)−mk2) <
<kx−πM(x)k2 Was aber ein Widerspruch zu der Minimalit¨at von kx−πM(x)k ist da M kovex ist und damit λm+ (1−λ)πM(x)∈M.
2. Wir verwenden Behauptung 1. zweimal und bekommen
kx−yk2 =k(x−πM(x))−(y−πM(y)) + (πM(x)−πM(y))k2 = k(x−πM(x))−(y−πM(y))k2+kπM(x)−πM(y)k2 + +2h(x−πM(x))−(y−πM(y)), πM(x)−πM(y)i =
=k(x−πM(x))−(y−πM(y))k2+kπM(x)−πM(y)k2 +
= 2hx−πM(x), πM(x)−πM(y)i+ 2hy−+πM(y), πM(y)−πM(x)i ≥
≥ kπM(x)−πM(y)k2
Abbildung 2: Die Projektion auf einer konvexen Menge
... ...
............
...
...
...
...
...
.. ... .. ...
. ...
.. .. ..
.. . ...
. .. . ...
. .. ...
.. . ... . .. ...
.. . ... . .. ... . .. .. ..
.. .. . ...
.. . ...
.. . .. ...
. .. ... . .. .. ..
.. .. ...
.. . .. ... .. .. ..
.. .. ...
.. .. ... .. .. ...
.. .. ... . .. ...
.. ...
.. .. ... . .. ...
.. . ...
.. . ...
.. ... . ... . .. ..
.. . ...
. . ...
. . ...
. . ..
.. ..
. . ..
. .. . . . ..
.. ..
. . ...
. ..
.. ..
.. ...
. ...
... .. ...
... .. ..
.. ... . ... . ... ...
.. ...
... .. ...
... .. ..
.. ... ....
....
.....
.......
..
...
........................................................................................
x
y
M
πM(y) πM(x)
l
llhh hhhh
Proposition 2.8. Sei (H,k k) ein Hilbertraum und C ⊆D⊆H, C 6=∅, C abgeschlossen und konvex. Dann ist C ein Retrakt von D.
Beweis. Betrachten wir die Konvexe Projektion πC : D→ C, die nach dem Projektionssatz wohldefiniert ist und f¨ur die giltπC|C = idC. Nach der zwei- ten Behauptung von Proposition 2.7 folgt, dass die Abbildung lipschitzstetig mit Konstante 1 ist und damit auch stetig, also eine Retraktion.
Proposition 2.9. Sei(U,XU)ein Retrakt von(X,X). Hat(X,X)die Fixpunkt- Eigenschaft, dann hat auch (U,XU) die Fixpunkt-Eigenschaft.
Beweis. Da U ein Retrakt ist existiert eine stetige Abbildung r : X → U f¨ur die gilt ∀u ∈ U : r(u) = u. Sei jetzt eine stetige Funktion g : U → U gegeben und nehmen wir an sie hat keinen Fixpunkt also∀x∈U :g(x)6=x.
Betrachten wir die stetige Abbildung g◦r : X → U ⊆ X. F¨ur x ∈ U gilt g(r(x)) = g(x) 6= x. F¨ur x 6∈ U gilt g(r(x)) ∈ U was bedeutet, dass auch
g(r(x)) 6= x. Das ist aber ein Widerspruch da g ◦r eine stetige Abbildung von X nachX ist und einen Fixpunkt haben sollte. Das heißt g besitzt einen Fixpunkt.
Proposition 2.10. Sei (M, ρ) ein metrischer Raum. Seien Mengen A, C ⊆ M gegeben, wobei A abgeschlossen und C kompakt ist. Sei die Abbildung f :A→C stetig. Weiters gelte
∀ >0 ∃x∈A :ρ(f(x), x)< . Dann hat f einen Fixpunkt.
Beweis. Sei zn:=x1
n f¨urn∈N. Dann ist (f(zn)) eine Folge inCund besitzt daher eine in C konvergente Teilfolge f(znk)→y f¨ur k→ ∞. Es folgt
ρ(znk, y)≤ρ(znk, f(znk)) +ρ(f(znk), y)<1/nk+ρ(f(znk), y)→0, also znk →y. DaA abgeschlossen ist, folgty∈A. Jetzt wegen der Stetigkeit von f ist auch f(znk)→f(y). Zusammen mitf(znk)→yfolgtf(y) = y.
3 Der Fixpunkts¨ atz von Brouwer
In diesem Kapitel fangen wir mit den Begriffen des Simplexes und die bary- zentrische Koordinaten an. Dabei zeigen wir die Stetigkeit dieser Koordinaten- Projektion und dass der Simplex hom¨oomorph zur Einheitskugel ist. Als N¨achstes kommt das Lemma von Sperner als eine hilfreiche kombinatorische Uberlegung. Danach kommt der eigentliche Beweis des Fixpunktsatzes von¨ Brouwer. Er geht ¨uber den Begriff der Index-Menge und ein Paar Eigenschaf- ten davon. Dann zeigt man die Existenz einer gen¨ugend feiner simplizialen Zerlegung und zum Schluss wird der Fixpunktsatz indirekt mittels des Lem- mas von Sperner bewiesen.
3.1 Simplices und baryzentrische Koordinaten
Definition 3.1 (Simplex). Seien p0, . . . , pn affin unabh¨angige Punkte im affinen Raum Rm,m ≥n. Dann heißt die konvexe H¨ulle
{λ0p0+· · ·+λnpn :λi ∈R,0≤λi ≤1, λ0+· · ·+λn= 1}
ein n-dimensionales Simplex Σ = ∆(p0, . . . , pn) und p0, . . . , pn heißen die Ecken des Simplex. W¨ahlt man d+ 1 Ecken pi0, . . . , pid mit
0≤i0 < i1 <· · ·< id≤n, d < n
aus, so heißt das davon erzeugte Simplex ∆(pi0, . . . , pid) eined-dimensionale Seite des Simplex Σ, die den nicht ausgew¨ahlten Ecken pj ,j 6=ik, 1≤k ≤d gegen¨uber liegt.
Definition 3.2(Baryzentrische Koordinaten). Die Zahlenx0, . . . , xnvon der eindeutigen Darstellung jedes x∈Σ = ∆(p0, . . . , pn)
x=x0p0+· · ·+xnpn
mit 0 ≤xi ≤1 undx0+· · ·+xn = 1 nennen wirbaryzentrische Koordinaten und schreiben Bi(x) := xi.
Proposition 3.3. Die Abbildung x→Bi(x) von Σ = ∆(p0, . . . , pn) nach R ist stetig.
Beweis. Seien x=x0p0+· · ·xnpn und y=y0p0+· · ·ynpn zwei Punkte in Σ.
Wegen x0+· · ·+xn = 1 undy0 +· · ·+yn = 1 k¨onnen wir umschreiben x=pn+x0(p0−pn) +· · ·+xn−1(pn−1−pn)
y=pn+y0(p0−pn) +· · ·+yn−1(pn−1−pn) und dann voneinander substrahieren
y−x= (y0 −x0)(p0−pn) +· · ·+ (xn−1−yn−1)(pn−1−pn).
Da die Norm k.k2 stetig bei 0 ist, folgt aus ky−xk2 → 0, dass y−x → 0.
Es gilt also
(y0−x0)(p0−pn) +· · ·+ (yn−1−xn−1)(pn−1−pn)→0.
Zusammen mit der linearen Unabh¨angigkeit von p0−pn, . . . , pn−1−pn folgt yi−xi →0 f¨ur allei < n. Das heisst aber auch
yn−xn= (x0−y0) +· · ·(xn−1−yn−1)→0.
Proposition 3.4. Sei Σ ⊆ Rm ein n-dimensionales Simplex. Dann ist Σ hom¨oomorph zu der abgeschlossenen Einheitskugel
Kn(0,1) :={x∈Rn:kxk2 ≤1} ⊆Rn.
Beweis. Sei Σ = ∆(p0, . . . , pn). Dann ist der Schwerpunkt von Σ durch
b= 1
n+ 1
n
X
i=0
pi
gegeben. F¨ur jedes x ∈ Σ\{b} betrachten wir den Schnittpunkt y(x) des Strahles (1−µ)b+µx (von b durch x) mit dem Rand ∂Σ. Jetzt definieren wir folgende Funktion:
ϕ(x) :=
( λ(x)
ky(x)−bk2(y(x)−b) = ky(x)−bkx−b
2 x6=b
0 x=b
wobeiλ(x)∈[0,1] die Zahl von der eindeutigen Darstellung vonxals konvexe Kombination von b und y ist
x= (1−λ(x))b+λ(x)y(x) (1)
Man sieht, dass λ(x) = ky(x)−bkkx−bk2
2 gilt. Die Funktion ϕ ist wohldefiniert und wirklich eine Abbildung in Kn(0,1) da kϕ(x)k2 =
w w w
λ(x)
ky(x)−bk2(y(x)−b) w w w2 =
|λ(x)| ≤1. Weiters k¨onnen wir f¨urϕ folgenden Eigenschaften zeigen:
1. F¨ur einen Punkt z0 ∈ Kn(0,1)\{0} betrachten wir den Schnittpunkt des Strahles b+κz0 mit dem Rand ∂Σ und bezeichnen wir ihn mit y0. Es gilt kyy0−b
0−bk2 = kzz0
0k2. Jetzt definieren wir x0 = (1− kzk2)b+kzk2y0. Wir haben
ϕ(x0) = λ(x0)
ky(x0)−bk2(y(x0)−b) = kz0k2
ky0−bk2(y0−b) = kz0k2
kz0k2z0 =z0 Also f¨ur jedenz0 k¨onnen wir einx0 finden, sodassϕ(x0) =z0. Das zeigt die Surjektivit¨at von ϕ.
2. Seiϕ(x1) =ϕ(x2), dann giltkϕ(x1)k2 =kϕ(x2)k2also w w w
λ(x1)
ky(x1)−bk2(y(x1)−b) w w w2
= w
w w
λ(x2)
ky(x2)−bk2(y(x2)−b) w w
w2womit folgt, dassλ(x1) =λ(x2) undky(xy(x1)−b
1)−bk2 =
y(x2)−b ky(x )−bk .
Angenommen ky(x1)−bk2 > ky(x2)−bk2. Da y(x2) ∈ ∂Σ folgt, dass es ein i: 0≤i≤n existiert, sodass Bi(x2) = 0. Wegen
y(x1) = ky(x1)−bk2
ky(x2)−bk2y(x2) +
1− ky(x1)−bk2 ky(x2)−bk2
b
w¨are Bi(x1) =
1− ky(xky(x1)−bk2
2)−bk2
1
n+1 < 0 also Widerspruch. Das heißt ky(x1)−bk2 =ky(x2)−bk2 also y(x1)−b=y(x2)−b und damit auch y(x1) = y(x2). Wegen (1) folgt jetzt schließlich x1 =x2. Damit ist die Injektivit¨at von ϕ gezeigt.
3. Nach Gleichung (1) folgt Bi(x) = (1 − λ(x))Bi(b) + λ(x)Bi(y(x)).
Da y(x) ∈ ∂Σ folgt, dass es ein i existiert, sodass Bi(x) = 0. Dies zusammen mit Bi(b) = n+11 ergibt Bi(x) = (1−λ(x))n+11 also λ(x) = 1−(n+ 1)Bi(x). Da nach Proposition 3.3 Bi(x) stetig ist, folgt, dass auchλ(x) stetig ist. Wieder von (1) bekommt man y(x) = λ(x)1 x+ (1−
1
λ(x))b und da wie gezeigt λ(x) stetig ist, folgt das auch y(x) (sobald λ(x)6= 0) stetig ist. Das zusammen bedeutet aber, dassϕ(x) stetig ist.
F¨ur den Fall y(x)→0 ist offensichtlich, dass auch ϕ(x)→0.
Die gezeigten Eigenschaften bedeuten, dass ϕ ein Hom¨oomorphismus von Σ nach Kn(0,1) ist und dadurch Σ undKn(0,1) hom¨oomorph sind.
3.2 Die Simpliziale Zerlegung und das Lemma von Sper- ner
Definition 3.5 (Simpliziale Zerlegung). Eine Simpliziale Zerlegung eines n- dimensionalen Simplex Σ = ∆(p0, . . . , pn) ist eine endliche Menge von paar- weise verschiedenen n-dimensionalen Simplices Σ1, . . . ,Σr sodass
1. Σ = Σ1∪ · · · ∪Σr.
2. F¨urj 6=k ist Σj∩Σk =∅ oder eine Seite von Σj und Σk.
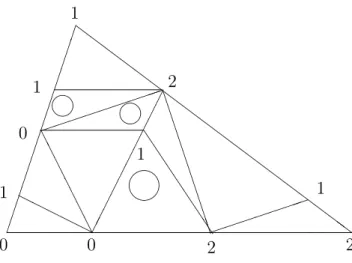
Satz 3.6 (Lemma von Sperner). Sei {Σ1, . . . ,Σr} eine simpliziale Zerlegung eines n-dimensionales Simplex Σ, und jedem Punkt, der als Ecke eines Sim- plex Σj auftritt, sei eine der Zahlen 0, . . . , n als Marke so zugeordnet, dass gilt:
1. An den n+ 1 Ecken von Σ stehen 0, . . . , n in irgendeiner bijektiven Zuordnung.
2. Ist eine Seite eines Σj in einer Seite F von Σ enthalten, so kommen an den Ecken von S nur Marken vor, die auch an den Ecken von F vorkommen.
Dann gibt es ein j, sodass die Ecken von Σj in einer bijektiven Zuordnung mit 0, . . . , n stehen. (Siehe dazu Abbildung 3)
Beweis. Zuerst werden wir die Behauptung f¨ur Dimension n= 2 zeigen und das Ergebnis dann induktiv verwenden.
Also wir habenn = 2 und an den Ecken stehen 0, 1 oder 2. Jetzt definieren wir einen Graph G folgendermaßen:
• Die Knoten von G sind genau alle r Simplexes {Σ1, . . . ,Σr} der sim- plizialen Zerlegung plus den Außenbereich O. Also eingestimmt r+ 1 Knoten.
• Zwei Knoten dieses Graphes sind genau dann durch eine Kante ver- bunden, wenn beide zugeh¨orige Gebiete eine gemeinsame Seite mit den Marken 0 und 1 besitzen.
Da durch Teilen der 0−1 Seite des Simplexes man immer auf eine unge- rade Anzahl von kleinere 0−1 Seiten kommt ist es klar, dass der Knoten O nur einen ungeraden Grad haben kann.
Da die Summe aller Graden der Knoten eines ungerichteten Graphes ge- rade ist, muss die Anzahl der Knoten mit ungeraden Graden eine gerade Zahl sein. WeilO einen ungeraden Grad hat, muss die Anzahl der Knoten aus der Menge {Σ1, . . . ,Σr} mit ungeraden Graden ungerade sein.
Die m¨ogliche Grade f¨ur einen Knoten bei Dimension 2 sind 0, 1 oder 2, wobei die einzige ungerade Zahl darunter 1 ist, was sich nur dann ergibt wenn wir ein 0−1−2 Simplex haben. Da aber die Anzahl solcher Knoten ungerade (also zumindest 1) ist, haben wir den Fall n = 2 bewiesen.
F¨ur die Dimensionn+ 1 geht man analog vor. Man definiert wieder einen Graphen mit den Knoten{Σ1, . . . ,Σr, O}und eine Kante zwischen zwei Kno- ten genau dann, wenn beide Gebiete eine gemeinsame Seite mit den Marken 0,1, . . . , n besitzen. Durch die induktive Behauptung f¨ur die um 1 kleinere Dimension n, sieht man wie oben, dass der Grad von O ungerade ist. Ganz
analog folgt weiter, dass die Anzahl der Knoten aus {Σ1, . . . ,Σr} mit unge- raden Graden ungerade ist. Da aber die m¨oglichen Graden der Innengebiete nur 0, 1 und 2 sind, wobei 1 die einzige ungerade Zahl darunter ist, die nur im Fall eines 0−1− · · · −(n+ 1) Simplex m¨oglich ist folgt die Behauptung auch f¨ur diese Dimension.
Abbildung 3: Sperner-Lemma in Dimension 2 mit drei 0−1−2 Simplexes
m m
ZZ
Z Z
Z Z
Z Z
Z Z
Z Z
Z Z
Z Z
Z ZZ
A A A A A A A
B B
B B
B B
B B
B B
.
H
HH HH
.
J J
J J
J J
J
1
2 0
1 1 2
0 1
0 2 1
Bemerkung 3.7. Das letzte Lemma besagt sogar mehr als die Existenz ein j, sodass die Ecken von Σj in einer bijektiven Zuordnung mit 0, . . . , n stehen.
N¨amlich es besagt das es eine ungerade Anzahl von Simplexes gibt mit Ecken die in einer bijektiven Zuordnung mit 0, . . . , n stehen.
3.3 Der Fixpunktsatz von Brouwer
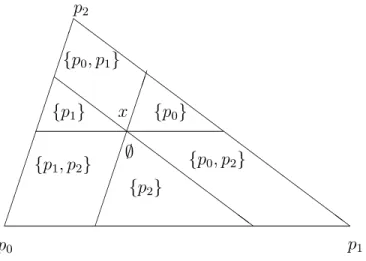
Definition 3.8 (Index-Menge). F¨ur eine Funktion f : Σ → Σ nennen wir die folgende Menge die Index-Menge des Punktesx
Mf(x) :={pi :Bi(f(x))<Bi(x)} ⊆ {p0, . . . , pn}.
Analog definiert man f¨ur eine MengeA⊆Σ, folgende Index-MengeMf(A) :=
S
x∈AMf(x).
Abbildung 4: Die Bereiche f¨ur den Bild f(x) mit verschiedene Index-Mengen
ZZ
Z Z
Z Z
Z Z
Z Z
Z Z
Z Z
Z Z
Z ZZ Z
Z Z
Z Z
Z Z
Z Z
Z Z
Z ZZ
p2
p1 p0
{p0} {p1}
{p2}
{p0, p2} {p1, p2}
{p0, p1}
∅ x
Proposition 3.9. F¨ur eine Funktion f : Σ→Σ und einen Punkt x∈Σ ist Mf(x) = ∅ ¨aquivalent zu f(x) =x.
Beweis. Von P
iBi(f(x)) = 1 =P
iBi(x) folgt P
i(Bi(f(x))−Bi(x)) = 0.
Von Mf(x) = ∅ folgt aber Bi(f(x))−Bi(x) ≥ 0 f¨ur alle i. Eine Summe nicht negativen Zahlen ist nur dann 0 wenn alle Summanden 0 sind, also Bi(f(x))−Bi(x) = 0 f¨ur alle i. Das heißtf(x) =x.
Umgekehrt ausf(x) =x folgtBi(f(x)) = Bi(x) also Mf(x) = ∅.
Proposition 3.10. Aus x ∈ ∆(pi0, . . . , pid) ⊆ Σ, d < n folgt Mf(x) ⊆ {pi0, . . . , pid}.
Beweis. Ausx∈∆(pi0, . . . , pid) folgtBj(x) = 0 f¨ur allej 6∈ {i0, . . . , id}. Das heißt Bj(f(x)) ≥ Bj(x) = 0 f¨ur alle solche j. Das bedeutet pj 6∈ Mf(x), woraus man schließt, dass Mf(x)⊆ {pi0, . . . , pid}.
Proposition 3.11. Sei x∈Σ und f(x)6=x. Dann Mf(x)({p0, . . . , pn}.
Beweis. Sei f(x) 6= x und sei Bi(f(x)) ≤ Bi(x) f¨ur alle i. Zusammen mit P
i(Bi(x)−Bi(f(x))) = 0 w¨urde daraus folgen Bi(x)−Bi(f(x)) = 0 also
Bi(x) =Bi(f(x)) was aber zuf(x)6=xein Widerspruch ist. Das heißt, dass es ein k existiert, sodass Bk(f(x))>Bk(x) also Mf(x)6={p0, . . . , pn}.
Proposition 3.12. Sei x∈Σundf(x)6=x. Dann gibt es ein=x >0und eine MengeN(x)({p0, . . . , pn}, sodass f¨ur alley∈Σmitky−xk2 < x gilt, dass Mf(y)⊆N(x). Also f¨ur jeden Punkt der bei der Anwendung vonf nicht fix bleibt, gibt es eine -Umgebung dieses Punktes in der alle Punkte Index- Mengen besitzen, die Teilmengen einer echten Teilmenge von {p0, . . . , pn} sind.
Beweis. Daf(x)6=x, gibt es nach Proposition 3.11 eink, sodassBk(f(x))>
Bk(x). Sei jetzt N(x) := {p0, . . . , pn}\{pk}. Die Funktion x → Bk(f(x))− Bk(x) ist wegen Proposition 3.3 unter Ber¨ucksichtigung der Stetigkeit von f auch stetig. Also von Bk(f(x))−Bk(x)>0 folgt, dass es ein x existiert, sodass f¨ur alle y mit ky−xk2 < x gilt Bk(f(y))−Bk(y) > 0). Das heißt schließlich pk 6∈Mf(y) also Mf(y)⊆N(x).
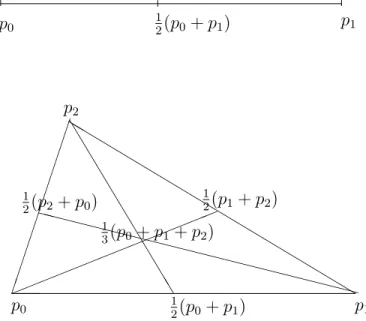
Definition 3.13 (Einfache Simpliziale Zerlegung). F¨ur einn-dimensionales Simplex Σ = ∆(p0, . . . , pn) definieren wir rekursiv folgende simpliziale Zerle- gung (siehe Abbildung 5).
Dimension 1 Das Simplex Σ = ∆(p0, p1) wird in ∆(p0,12(p0 + p1)) und
∆(12(p0+p1), p1) zerlegt.
Dimension n+1 Das Simplex Σ = ∆(p0, . . . , pn+1) wird in den Simplexes unterteilt die entstehen, wenn man den Schwerpunkt n+11 (p0+· · ·+pn+1) mit den Ecken der Simplexes von den simplizialen Zerlegungen aller n- dimensionalen Seiten verbindet.
Proposition 3.14. F¨ur alle >0 gibt es eine simpliziale Zerlegung von Σ in Simplices Σ1, . . . ,Σr, sodass ky−xk2 < f¨ur x, y ∈Σj.
Beweis. Man kann leicht sehen, dass f¨ur die einfache simpliziale Zerlegung von 3.13 folgendes
max{ky−xk2 :x, y ∈Σj} ≤ n
n+ 1 max{ky−xk2 :x, y ∈Σ}
gilt. Wenn wir also die Zerlegung k mal wiederholen, bekommen wir max{ky−xk2 :x, y ∈Σjk} ≤
n n+ 1
k
max{ky−xk2 :x, y ∈Σ}.
Das heißt max{ky−xk2 :x, y ∈Σjk} →0, wenn k → ∞.
Abbildung 5: Einfache simpliziale Zerlegung Dimension 1 und 2
b b b b b b b b b b b b b b b b b b bb
T T
T T
T T
T T
T T
T T
!!!!!!!!!!!!!!
XX XX XX XX XX XX XX XX XX XX XX
p0 1 p1
2(p0+p1)
p0 p1
p2
1
3(p0+p1 +p2)
1
2(p1+p2)
1
2(p2+p0)
1
2(p0+p1)
Proposition 3.15. Hat f : Σ→ Σ keinen Fixpunkt, so gibt es eine simpli- ziale Zerlegung Σ1, . . . ,Σr, sodass
Mf(Σj)6={p0, . . . , pn} ∀1≤j ≤r.
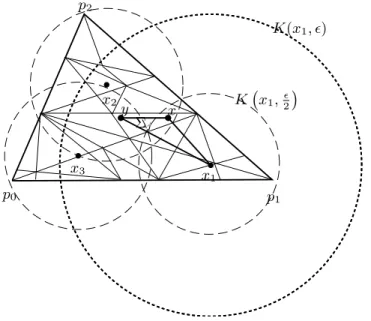
Beweis. Mit x aus Proposition 3.12 ist {K(x,2x) : x ∈ Σ} eine offene Uberdeckung von Σ. Da Σ kompakt ist k¨¨ onnen wir eine endliche ¨Uberdeckung daraus w¨ahlen:
Σ⊆K x1,x1
2
∪. . . K xs,xs
2
Sei <min(x1, . . . , xs) und Σ = Σ1∪ · · · ∪Σreine simpliziale Zerlegung mit ky−xk< 2 f¨urx, y ∈Σj (Proposition 3.14). Von∅ 6= Σj ⊆Σ folgt, dass f¨ur alle Σj ein xi existiert, sodass K(xi,xi2 )∩Σj 6= ∅. F¨ur x ∈ Σj ∩K(xi,xi2 ) und y ∈Σj folgt
kxi−yk ≤ kxi−xk+kx−yk< xi 2 +
2 < xi
, also f¨ur alle y ∈ Σj gilt kxi−yk < xi. Das heißt Σj ⊆ K(xi, xi)(siehe Abb. 7). Jetzt nach Proposition 3.12 folgtMf(Σj) =S
y∈ΣjMf(y)⊆N(xi)6=
{p0, . . . , pn}.
Abbildung 6: Die ¨Uberdeckung und die simpliziale Zerlegung
p0 p1
p2
x1
x2
x3
Σj
y x K x1,2 K(x1, )
Satz 3.16 (Fixpunktsatz von Brouwer). Die abgeschlossene Einheitskugel Kn+1(0,1) :={x∈Rn+1 :kxk2 ≤1} ⊆Rn+1 , n≥0
hat die Fixpunkt-Eigenschaft.
Beweis. Wegen Lemmata 2.4 und 3.4 m¨ussen wir den Satz nur f¨ur eine Funk- tion f : Σ → Σ := ∆(p0, . . . , pn) zeigen. Jetzt sei Σ1, . . . ,Σr eine beliebige simpliziale Zerlegung und habe f keinen Fixpunkt. Ordnen wir jeder Ecke x der Zerlegung einen Index i zu, sodass pi ∈ Mf(x). Nach Proposition 3.10 gilt es Mf(pj) ⊆ {pj}, womit Mf(pj) = {pj} also j ist die Marke von pj. Sei x ∈ ∆(pi0, . . . , pid) ⊆ Σ so folgt wieder nach Proposition 3.10, dass Mf(x)⊆ {pi0, . . . , pid}, womit die Marke vonx in {i0, . . . , id} liegt.
Jetzt sind die Bedingungen des Sperner Lemmas 3.6 erf¨ullt und es sollte einj existieren, sodass die Ecken von Σj := ∆(y0, . . . , yn) die Marken 0, . . . , n haben. Das bedeutet:
{p0, . . . , pn}=
n
[
i=0
Mf(yi)⊆ [
y∈Σj
Mf(y) =:Mf(Σj) Da die umgekehrte Inklusion offensichtlich ist folgt die Gleichheit.
{p0, . . . , pn}=Mf(Σj)
Da dies f¨ur jede simpliziale Zerlegung gelten soll folgt, dassf einen Fixpunkt haben soll, da sonst sich ein Widerspruch zu Proposition 3.15 ergibt.
4 Die Fixpunkts¨ atze von Schauder and Ka- kutani
In diesem Kapitel werden die Fixpunkts¨atze von Schauder and Kakutani mithilfe vom Brouwersche-Fixpunktsatz bewiesen.
4.1 Der Fixpunktsatz von Schauder
Lemma 4.1. Sei (E,k k) ein n-dimensionaler normierter Raum ¨uber R,
∅ 6=C ⊆E, C kompakt und konvex. Dann hat C die Fixpunkt-Eigenschaft.
Beweis. Es existiert eine bijektive lineare Abbildungϕ :E →Rn. Also ist ϕ ein Hom¨oomorphismus von (E,k k) nach (Rn,k k2). Daraus folgt, dassϕ(C) kompakt und konvex ist, da ϕ entsprechend stetig und linear ist. Da C zu ϕ(C) hom¨oomorph ist, brauchen wir wegen Proposition 2.4 die Fixpunkt- Eigenschaft nur f¨ur ϕ(C) zeigen.
Von ϕ(C) kompakt folgt, dass es ein genug grosses a > 0 existiert, so- dass ϕ(C) ⊆ Kn(0, a). Da aber Kn(0, a) hom¨oomorph zu Kn(0,1) ist und Kn(0,1) die Fixpunkt-Eigenschaft hat folgt, dass auchKn(0, a) die Fixpunkt- Eigenschaft hat. Von der Tatsache, dass (Rn,k k2) ein Hilbertraum ist und ϕ(C) kompakt und konvex ist folgt nach Proposition 2.8, dass ϕ(C) ein Retrakt von Kn(0, a) ist. Schließlich nach Proposition 2.9 besitzt ϕ(C) die Fixpunkt-Eigenschaft.
Proposition 4.2 (Schauder-Projektion). Sei (E,k k)ein normierter Raum,
∅ 6= C ⊆ E, C kompakt, > 0, dann existieren x1, . . . , xn ∈ C und eine stetige Abbildung g :C →∆(x1, . . . , xn), sodass
kg(x)−xk< ∀x∈C.
Abbildung 7: Schauder-Projektion
x1 x2 x3 x4
x5 x6
x7 x8 x9
K(x3, ) g3(x) = 0
x g3(x)
C E
Beweis. DaCkompakt ist folgt, dassC total beschr¨ankt ist. Also es existiert ein -Netz {x1, . . . , xn} ⊆ C. Das heißt f¨ur alle x ∈ C existiert ein xi mit kx−xik< . Seien jetzt die Funktionen g1, . . . , gn:C →R definiert durch:
gi(x) := max{0, − kx−xik}
Alle gi sind offensichtlich stetig und es gilt
gi(x)6= 0 ⇔xi ∈K(x, )
Das bedeutet, dass die Abbildung g :C→∆(x1, . . . , xn) definiert durch g(x) :=
Pn
i=1gi(x)xi Pn
i=1gi(x) (wegengi(x)≥0 undPn
i=1gi(x)>0) stetig ist. Sie wirdSchauder-Projektion genannt. Da g(x) eine konvexe Kombination ¨uber alle xi mit gi(x) 6= 0 ist und alle solche xi im K(x, ) liegen, liegt auch deren konvexe Kombination g(x) auch in K(x, ). Das heißt aber kg(x)−xk< .
Satz 4.3 (Fixpunktsatz von Schauder). Sei (E,k k) ein normierter Raum, K ⊆ E, K konvex und abgeschlossen, ∅ 6=C ⊆ K, C kompakt, f :K → C
⇒ f hat einen Fixpunkt.
Beweis. DaCkompakt ist folgt, dass es Punktex1, . . . , xn ∈Cund eine steti- ge Funktiong :C →∆(x1, . . . , xn) existieren, sodasskg(x)−xk< . Seih= g◦f :K →K0 = ∆(x1, . . . , xn)⊆K. Da h stetig ist folgt nach Lemma 4.1, dass die Beschr¨ankung vonhaufK0,h|K0 (K0 beschr¨ankt imn-dimensionalen Raum erzeugt von x1, . . . , xn), einen Fixpunkt z ∈ K0 hat. Wir haben also g(f(z)) =z. Damit bekommen wir kf(z)−zk =kf(z)−g(f(z))k < . Das heisst, dass es f¨ur alle >0 ein z existiert, sodasskf(z)−zk< und nach Proposition 2.10 folgt, dass f einen Fixpunkt hat.
4.2 Der Fixpunktsatz von Kakutani
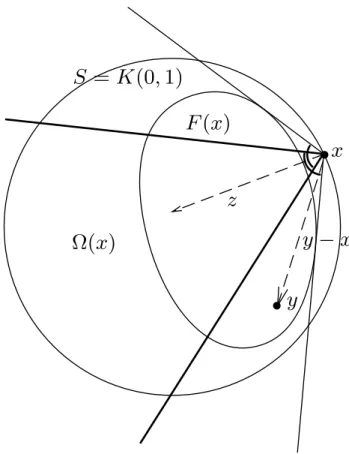
Satz 4.4 (Fixpunktsatz von Kakutani). Sei S eine nichtleere, konvexe, kom- pakte Teilmenge von Rn, F : S → P(S) eine mengenwertige Funktion mit einem abgeschlossenen Graph gph(F) = {(x, y)|x ∈ S, y ∈ F(x)} und f¨ur jedes x∈ S sei die Bildmenge F(x)⊆ S nichtleer und konvex. Dann besitzt F einen Fixpunkt, also es gibt ein x∈S, so dass x∈F(x).
Beweis. Sei Sdie EinheitskreisK(0,1), und es geltex6∈F(x) f¨ur allex∈S.
Nach dem Trennungssatz gibt es zu jedem x∈S ein z ∈Rn als Trennungs- vektor f¨urx undF(x), also ein z mit t(z, x) := inf{hz, y−xi|y∈F(x)}>0.
Also ist Ω(x) := {z|t(z, x)>0}nie leer, wonach f¨ur Ω−1(z) :={x|t(z, x)>0}
Folgendes gilt
S ⊆ [
z∈Rn
Ω−1(z)
G¨abe es n¨amlich ein x ∈ S und x 6∈ ∪z∈RnΩ−1(z) w¨urde f¨ur alle z ∈ Rn folgen t(z, x)≤0 was ein Widerspruch w¨are da Ω(x) f¨ur allex∈S nicht leer ist. Es gilt weiters
Ω−1(z) relativ offen in S
Andernfalls g¨abe es einz ∈Ω(x) sowie eine Folgexk∈S\Ω−1(z) mitxk→x, was ¨aquivalent zu
inf{hz, y−xki|y∈F(xk)} ≤0
w¨are. Da F(xk) kompakt ist, gibt es ein yk ∈F(xk), sodass hz, yk−xki ≤0.
Die Folge yk besitzt eine konvergente Teilfolge, also es gilt o.B.d.A yk → y.
Abbildung 8: Zum Beweis des Fixpunktsatzes von Kakutani
x F (x)
S = K (0, 1)
Ω(x)
y
y − x z
Da aber gph(F) abgeschlossen ist und (xk, yk)∈ gph(F) folgt auch (x, y)∈ gph(F), was aber zum Widerspruch hz, y−xi ≤0 f¨uhrt, weil z ∈Ω(x).
Nach dem ¨Uberdeckungssatz folgt jetzt, dass es eine endliche ¨Uberdeckung von S gibt
S ⊆ [
p∈{1,...,n}
Ω−1(zp)
Dies zusammen mit der Abgeschlossenheit aller Ap = S\Ω−1(zp) ergibt f¨ur dp(x) := dist(x, Ap), dass d(x) := Σpdp(x)>0 f¨ur alle x. Definieren wir
λp(x) := dp(x)/d(x) und z(x) := Σpλp(x)zp
Man sieht, dass z(x) ∈ Ω(x) und z(x) 6= 0. Die Funktion f(x) = kz(x)kz(x) ist
daher stetig, erf¨ulltf(x)∈Ω(x) und bildet die KugelSstetig auf ihren Rand ab. Nach dem Fixpunktsatz von Brouwer hatf einen Fixpunkt:x∗ =f(x∗)∈ Ω(x∗). Es gilt kx∗k =hx∗, x∗i = 1 und 0 < inf{hx∗, y −x∗i|y ∈ F(x∗)} (da x∗ ∈ Ω(x∗)). Weiters hx∗, yi > hx∗, x∗i = 1 f¨ur alle y ∈ F(x∗). Daraus folgt F(x∗)∩K(0,1) = ∅, was ein Widerspruch zu ∅ 6= F(x∗) ⊆ S ist. Damit ist die Annahme x 6∈ F(x) f¨ur alle x ∈ S falsch und die Behauptung f¨ur S =K(0,1) gezeigt.
Analog zeigt man die Behauptung f¨ur den Kreis K(0, r). Schließlich f¨ur beliebige konvexe, kompakte Mengen indem man rgenug gross w¨ahlt so dass S ⊆K(0, r) und die FunktionF◦π :K(0, r)→S → P(S) betrachtet, wobei π(x) die Projektion von x∈K(0, r) aufS ist.
5 Anwendungen
Hier werden zwei spieltheoretische Behauptungen als Anwendung von ent- sprechend Brouwer- und Kakutani-Fixpunktsatz bewiesen.
5.1 Arbeitslemma ¨ uber den Brouwer-Fixpunktsatz
Lemma 5.1 (Arbeitslemma). Sei S :={x∈Rn|P
xi = 1, xi >0} das Ein- heitssimplex, Fi := {x ∈ S|xi = 0} seine i-te Seite, Xi ⊆ S abgeschlossene Mengen mit Fi ⊆Xi. Dann folgt von S
iXi =S, dass T
iXi 6=∅.
Bemerkung 5.2. Seixi die Arbeitsmenge die Personizu erledigen hat,x∈S eine solche Aufteilung und S die Menge aller Aufteilungen der Arbeit. Seien weiters Fi die Mengen der Aufteilungen mit den Person i einverstanden ist.
Die BedingungS
iXi =Sbesagt dass stets eine Person gibt die einverstanden ist. Die Behauptung des Lemmata besagt nun das es es eine Aufteilung gibt mit der alle einverstanden sind.
Beweis. Nehmen wir anT
iXi =∅und seidi := dist(x, Xi). Dann istdistetig und P
idi(x)>0. Definieren wir die Funktionf :S →S mit Komponenten fi(x) := di(x)
P
idi(x). Da S
iXi =S gilt, liegt x in wenigsten einemXi, also is stets ein fi(x) = 0.
Daher bildet f sogar auf den Rand δS =S
iFi von S ab. Wir haben auch, dass f(x)∈Fi, fallsx∈Fi ⊆Xi.
Sei g(x) der zu f(x) am Zentrum z := (n1, . . . ,1n) gespiegelten Punkt.
Dieser Punkt ist durch
z =λ(x)g(x) + (1−λ(x))f(x), 0< λ(x)<1, g(x)∈δS
beschrieben. Da auchf(x)∈δS folgt, dassg(x) undλ(x) stetige Funktionen sind. Also g(x) :S →δS und wegen der Spiegelung, von x∈Fi folgtg(x)6∈
Fi. Das heißt, dass f¨ur allex∈δS giltg(x)6=x. Die Punkte vom Inneren von S k¨onnen auch keine Fixpunkte sein da sie auf dem Rand abgebildet werden.
Das heißt, dass die stetige Funktiong(x) keine Fixpunkte hat und das ist ein Widerspruch zum Brouwer-Fixpunktsatz. Damit haben wir gezeigt, dass die Annahme T
iXi =∅ falsch ist und dadurch den Gegenteil bewiesen.
5.2 Nash-Gleichgewicht ¨ uber den Kakutani-Fixpunktsatz
Definition 5.3 (Nash-Gleichgewicht). Es sei ein n-Personenspiel gegeben, wobei jeder Spieler eine nicht leere, kompakte Strategiemenge Xi ⊆ Rm besitzt. Bei der Wahl x = (x1, . . . , xn) ∈ X1 × · · · ×Xn ist die Auszahlung des i-ten Spielers fi(x1, . . . , xn). Es ist keine Kooperation erlaubt. Der i-te Spieler ist mit der Situation x = (x1, . . . , xn) ∈ X1× · · · ×Xn genau dann zufrieden, wenn
fi(x1, . . . , xi−1, x0i, xi+1, . . . , xn)≤fi(x1, . . . , xn) ∀x0i ∈Xi (2) Man redet bei x = (x1, . . . , xn) von einem Nash-Gleichgewicht (Gleichge- wichtsituation) wenn (2) f¨ur allei gilt.
Satz 5.4. Seien alle fi(x1, . . . , xi, . . . , xn) stetig und in xi konkav. Dann besitzt das Spiel mindestens ein Nash-Gleichgewicht.
Beweis. Ordnen wir jedem x= (x1, . . . , xn)∈X1 × · · · ×Xn die Menge der Maximal-Punkte aus Xi
Fi(x1, . . . , xn) := argmax{fi(x1, . . . , xi−1, x0i, xi+1, . . . , xn)|x0i ∈Xi} ⊆Xi
Zeigen wir, dass f¨ur alle x und alle i, Fi(x) eine konvexe Menge ist. Daf¨ur betrachten wir die konvexe Kombination αx0i +βx00i (α, β ≥ 0 ,α+β = 1).
Wenn x0i, x00i ∈Fi(x) folgt
fi(x1, . . . , xi−1, x0i, xi+1, . . . , xn)≥fi(x1, . . . , xi−1, xi, xi+1, . . . , xn) fi(x1, . . . , xi−1, x00i, xi+1, . . . , xn)≥fi(x1, . . . , xi−1, xi, xi+1, . . . , xn)
f¨ur allexi. Das zusammen mit der Konkavit¨at von fi haben wir
fi(x1, . . . , xi−1, αx0i+βx00i, xi+1, . . . , xn)≥ αfi(x1, . . . , xi−1, x0i, xi+1, . . . , xn) +βfi(x1, . . . , xi−1, x00i, xi+1, . . . , xn)≥ αfi(x1, . . . , xi−1, xi, xi+1, . . . , xn) +βfi(x1, . . . , xi−1, xi, xi+1, . . . , xn) = (α+β)fi(x1, . . . , xi−1, xi, xi+1, . . . , xn) =fi(x1, . . . , xi−1, xi, xi+1, . . . , xn) Das bedeutet αx0i+βx00i ∈Fi(x) also die Menge Fi(x) ist konvex.
Da alle fi(x) stetig sind und Xi kompakt sind folgt, dass die Fi(x) nicht leer sind. Jetzt, betrachten wir die Funktion
F(x) := (F1(x), . . . , Fn(x)).
Sie hat klarerweise auch konvexe nicht leere Bilder F(x). Zeigen wir, dass sie einen abgeschlossenen Graph besitzt. Betrachten wir daf¨ur die Folgen xk := (xk1, . . . , xkn) aus X1× · · · ×Xn und uk := (uk1, . . . , ukn) ausF(xk) und nehmen wir an
(xk1, . . . , xkn)→(x1, . . . , xn) (uk1, . . . , ukn)→(u1, . . . , un).
Von (uk1, . . . , ukn)∈F(xk) := (F1(xk), . . . , Fn(xk)) folgt
fi(xk1, . . . , uki, . . . , xkn)≥fi(xk1, . . . , ξi, . . . , xkn) ∀i,∀ξi (3) W¨are ui 6∈F(xi), also g¨abe es einu0i, sodass Folgendes gilt
fi(x1, . . . , ui. . . , xn)< fi(x1, . . . , u0i, . . . , xn).
Aus Stetigkeit-Gr¨unden w¨urde dann aber Folgendes fi(xk1, . . . , uki . . . , xkn)< fi(xk1, . . . , u0i, . . . , xkn)
auch gelten. Das ist aber ein Widerspruch zu (3), womit die Annahme ui 6∈
F(xi) falsch ist. Also ist der Graph der Funktion F(x) abgeschlossen.
Das heißt wir k¨onnen den Kakutani-Fixpunktsatz anwenden, der die Exi- stenz eines x sichert, f¨ur das gilt x ∈ F(x). Das heißt wir haben bewiesen, dass das Spiel mindestens ein Nash-Gleichgewicht besitzt.
Literatur
[1] Jean-Pierre Aubin. Optima and Equilibria: An introduction to Nonlinear Analysis. Springer, 1984.
[2] Georg Ch.Pflug. Optimization of stochastic models. Kluwer academic publishers, 1996.
[3] G¨unther Eigenthaler. Funktional Analysis I, 2000.
[4] Bernd Kummer. Fixpunkte und anwendungen in optimierung und spiel- theorie, 2006.