Research Collection
Working Paper
Tragwiderstand von Hochhäusern
Author(s):
Zimmerli, Bruno Publication Date:
1980
Permanent Link:
https://doi.org/10.3929/ethz-a-000219378
Rights / License:
In Copyright - Non-Commercial Use Permitted
This page was generated automatically upon download from the ETH Zurich Research Collection. For more information please consult the Terms of use.
ETH Library
Tragwiderstand
vonHochhäusern
BrunoZimmerli
BirkhauserVerlagBasel¦Boston Stuttgart
August1980 BerichtNr.100
Institutfür Baustatik und Konstruktion ETH Zürich
Zimmerli,Bruno:
Tragwiderstandvon Hochhäusern/
vonBrunoZimmerli-
Basel,Boston,Stuttgart: Birkhauser,1980.
(Bericht/InstitutfürBaustatikund Konstruktion ETH-Zürich,Nr.100)
ISBN 3-7643-1230-0
Nachdruckverboten.
AlleRechte,insbesonderedas der
Übersetzung
infremdeSprachen und derReproduktionaufphotostatischem Wegeoderdurch Mikrofilm, vorbehalten.© BirkhauserVerlag Basel,1980 ISBN 3-7643-1230-0
von
Dr.sc.techn. Bruno Zimmerli
InstitutfürBaustatik und Konstruktion
Eidgenössische
Technische Hochschule ZürichZürich August1980
Bei schlanken Gebäuden werden nebst den Schwerelasten die horizontalen Lasten
infolge
Wind und Erdbeben von entscheidenderBedeutung.
Ent¬sprechend
bestimmen sie die Wahl eineszweckmässigen Tragsystems.
In dervorliegenden
Arbeit wird der Einfluss verschiedenerTragsysteme
auf den räumlichenTragwiderstand
untersucht. Das unterschiedliche Verhalten wird anhand vonInteraktions-Diagrammen
auch visuell klarherausgearbeitet.
Diese
Diagramme
erweisen sich als sehr nützlich für die Wahl eines zweck¬mässigen Tragsystems
im Entwurfsstadium wie auch für eine Vordimensionie- rung derwichtigsten Komponenten.
Herr Zimmerli hat diese Studie im Rahmen einer Doktorarbeit
durchgeführt.
Dabei konnte er sich auf seine
persönlichen Erfahrungen
bei der Ueber¬prüfung
von bedeutenden Hochhäusern und Türmen abstützen.Zürich,
August
1980 Prof. Dr. B. Thürlimann1. EINLEITUNG
1.1
Problemstellung
undZielsetzung
1.2 Annahmen 1.2.1 Lasten
1.2.2
Stoffgesetz
und Grenzwertsätze 2. MODELLBILDUNG FUER RAEUMLICHE HOCHHAUSSYSTEME3. DER TRAGWIDERSTAND VON EINFACHEN RAEUMLICHEN K-FACHWERKEN
3.1
Symmetrisches
Raumfachwerk3.2 Einfluss der
Horizontallastverteilung
3.3 Einfluss der
Symmetrie
3.4
Asymmetrisches
Raumfachwerk 4. MEHRFELDRIGE RAUMFACHWERKE4.1 Schubwand aus Stahlbeton
4.2
Dreifeldriges, symmetrisches
Raumfachwerk 5. RAEUMLICHE RAHMENSYSTEME5.1 Momenten-Normalkraft-Querschnittsinteraktion 5.2
Orthogonale Rahmensysteme
5.3
Rahmensystem
mit vier Eckstützen6. HOHLKASTEN AUS RAHMEN {FRAMED TUBES) 6.1
Gedrungene
Stützen undRiegel
6.2 Knotenbereiche
6.3 Der
Tragwiderstand
von Hohlkasten aus Rahmen7. SCHLUSSBEMERKUNGEN
7.1
Gleichgewichtsformulierung
am deformiertenSystem
7.2
Zusammenstellung
der Interaktionsformen 7.3 Offene ProblemeZUSAMMENFASSUNG'
RESUME SUMMARY
LITERATURVERZEICHNIS BEZEICHNUNGEN
Anhang
1Anhang
2Anhang
3Anhang
4Anhang
5Anhang
6Parameter-Bedingungen
des RaumfachwerksErgänzung
zu den StahlbetonscheibenMechanismen eines
dreifeldrigen
RaumfachwerksTraglastberechnung
eines RaumfachwerksInteraktionskurven für
Biegung
mit NormalkraftFliessgelenkstellen
inRahmensystemen
Seite 1
1 4 4 6
8 10
12 36 37 39
45
47 55
70
70 75 84
96
97 106 108 117
117 119 121
122
123 125 126 128
136 144 147 162 166 178
Anhang
7 :Fliessbedingungen
von Stahl- undStahlbetonquerschnitten
180Anhang
8 :Traglastberechnung
einesRahmensystems
181Anhang
9 : Einfluss von Gelenken in Stützenmitte 187Anhang
10: JM-V-Interaktionskurven eines Scheibenelementes 1881.1
Problemstellung
undZielsetzung
Die
Tragsysteme
von Hochhäusern sind räumlichenLasteinwirkungen
unterwor¬fen. Nebst Vertikallasten aus
Eigen-
und Nutzlast muss ein Gebäude auchHorizontallasten aus Wind- und
Erdbebenwirkung
widerstehen können. Im Ent¬wurf wird das räumliche
Tragsystem
vereinfachend in ebeneTeilsysteme,
dieeinzeln belastet werden,
aufgelöst.
DieAbmessungen
derTragelemente
werdenim
allgemeinen
mit elastischenBerechnungsmethoden
ermittelt. Ebene Rahmenwerden
näherungsweise
mit der Portalrahmen- undKragarm-Methode
berechnet[C3], [T1].
Dazugehören
auch die vielen von diesen beiden Methodenabge¬
leiteten
Spezialverfahren.
Scheiben werden oft als elastisches Kontinuum be¬handelt,
und diezugehörigen
Schnittkräfte sind für verschiedene Wandformen,Oeffnungsreihen
undLastverteilungen
tabelliert worden[B1], [C4], [R1],
[S2].
Sind dieAbmessungen
mit denNäherungsmethoden festgelegt,
werden inden
wichtigeren
Fällen dieSchnittgrössen
unter der Annahme eines elastischen Materialverhaltens am räumlichenSystem
mit einemStandard-Computerprogramm
bestimmt. Anschliessend werden die
Tragelemente
des Gebäudes mitSpannungs¬
nachweisen
überprüft.
Durch die beinahe unbeschränkten
Kombinationsmöglichkeiten
derLastparameter
muss diese räumliche
Schnittgrössenermittlung,
damit sie sinnvollist,
in mehrerenRichtungen
mit verschiedenenLastverteilungen
wiederholt werden.Diesem
Vorgehen
haften zwei wesentlicheMängel
an:1. Im Entwurf, der für die definitive
Systemwahl
entscheidendist,
wird dieBemessung
an ebenenTragsystemen durchgeführt.
Dadurch können im räum¬lichen Zusammenwirken dieser
Teilsysteme Richtungen
übersehen werden, diefür die
Dimensionierung
vonTragelementen massgebend
werden. Bei derräumlichen
Ueberprüfung
derSchnittgrössen
dürften solche Fehler sicheraufgedeckt
werden. Da aber dergrundsätzliche
Entscheid für ein bestimm¬tes
System
im Entwurfgefallen
ist, kann dieVerstärkung
der unterdimen¬sionierten
Tragelemente
zu einer wesentlichenVerteuerung
eines Gebäudesführen. Zudem lässt sich beim beschriebenen
Bemessungsvorgang
nicht er¬kennen wie das
gewählte Tragsystem
zu modifizieren wäre, um eine bessereTragwirkung
zu erreichen.2. Werden bei der elastischen
Berechnung
eines Hochhausesvorgegebene Span¬
nungsgrenzen
eingehalten,
resultiert innerhalb der Theorie 1.Ordnung
einunterer Grenzwert der
Traglast.
Die Kombination vonLastspannungen
mitunbekannten
Eigenspannungen
undSpannungskonzentrationen
bewirkt beijeder Bemessungsmethode
lokalePlastifizierungen
und damit eineUmverteilung
der
Schnittgrössen
in denTragelementen.
Daherliegt
eseigentlich nahe,
das elastischeStoffgesetz
fallen zu lassen und mit derBerücksichtigung
des
plastischen
Materialverhaltens dieTragreserven
eines Hochhauses zuermitteln.
Systemen
zubestimmen,
ohne dass sämtlicheFreiheitsgrade nachgebildet
unddie genauen
Stoffgesetze berücksichtigt
werden. Zudem soll der Widerstanddurch
globale Systemschnittgrössen ausgedrückt
werden.Die ganze Problematik soll am in Bild 1.1 skizzierten
Tragsystem
erläutertwerden. Die
Bestimmung
der räumlichenTraglast
für dassechzig
Stockwerke zählende Hochhaussprengt
nicht nur dieMöglichkeiten
vonComputerprogrammen,
wie sie für einen in der Praxis
tätigen Ingenieur verfügbar sind,
auch der Kostenaufwand wäre vor allem in derEntwurfsphase
unzumutbar.Grundriss
R2
, R4 _
o o
R3 R2
R3 R2
R4
Rahmen RI Rahmen R2
5
4
Rahmen
R3V \
/>
^N f/\l
Rahmen
R4Schubwand
S1BILD 1.1: HOCHHAUSSYSTEM MIT SECHZIG STOCKWERKEN
Tragsystem.
Die ebenen Schubwände und Rahmen sind durch die Decken zu einem räumlichenGesamtsystem
verbunden. Die Stützenwerden,
da siegleichzeitig
zwei Rahmenebenen
angehören,
auf schiefeBiegung beansprucht.
Aus demTrag¬
widerstand,
der einzeln für die ebenenTeilsysteme
ermitteltwird,
kann nicht ohne weiteres auf denSystemwiderstand geschlossen
werden. Esgeht
also da¬rum, aus
Widerständen,
die für die verschiedenenTragelemente
formuliertwerden
können,
denTragwiderstand
eineskomplex aufgebauten,
räumlichenSys¬
tems zu ermitteln.
Das Ziel dieser Arbeit ist es, mit einem einfachen Modell, das die
wichtig¬
sten Parameter des
Tragsystems wiedergibt,
den räumlichenTragwiderstand
vonHochhäusern zu bestimmen. Dazu werden zwei Annahmen
eingeführt,
die einer¬seits den Vorteil
bieten,
dass alleBerechnungen
auf einfache und einheit¬liche
Grundlagen abgestützt
werden können. Andererseits weisen sie den Nach¬teil
auf,
dass derGültigkeitsbereich
der Resultate in bestimmten Fällen wesentlicheingeschränkt
werden kann:1. Für die
dynamisch
wirkenden Horizontallasten werden statische Ersatzlasteneingeführt.
Dasdynamische
Verhalten im überelastischen Bereich wird so¬mit nicht erfasst. Eine umfassende
dynamische Berechnung
von Hochhäusern im nicht elastischen Bereich ist wegen derSystemgrösse vorläufig
ohne¬hin nicht realisierbar.
2. Das Materialverhalten wird mit einem
starr-plastischen Stoffgesetz
be¬schrieben. Die
Verformungsgeschichte
eines Gebäudes kann daher nicht an¬gegeben
werden. Damit lässt sich für dasTragwerk
auch kein Stabilitäts¬versagen
bestimmen,
das vor dem Erreichen derKollapslast
auftreten kann.Dennoch erleichtert ein einfaches Modell, das mit
wenigen
Parametern dasräumliche Zusammenwirken eines
Tragsystems
beschreibt, den Entwurf von Hoch¬häusern wesentlich. Sicher
gewinnen
die bis heuteangewandten Näherungs¬
methoden noch an
Bedeutung,
wenn sie mit räumlichenBetrachtungen ergänzt
werden.
Untersuchungen,
die das Stabilitätsverhalten und den Einfluss derdynamischen Belastung
unterBerücksichtigung
des wirklichenStoffgesetzes abklären,
kön¬nen immer noch
durchgeführt
werden, nachdem dieAbmessungen
aus dem Entwurf feststehen.Ueber den Stand dieser Probleme
gibt
es eine umfassendeZusammenstellung
im"Monograph
onPlanning
andDesign
of TallBuildings" [P2],
in dem auch zu¬künftige Forschungsarbeiten aufgeführt
sind.1.2.1 Lasten
Bevor auf die
Modellbildung
für räumlicheHochhaussysteme
und dieBerechnung
des
zugehörigen Tragwiderstandes eingegangen
werden kann, müssen Last und Widerstand über eingemeinsames Koordinatensystem
miteinanderverknüpft
wer¬den.
Eine horizontale
Belastung
kann auf zweiorthogonale Biegemomente
Mx ref undM j. und ein Torsionsmoment T r. in eine Bezugsebene, die vorteilhaft
y ref z ref ö
nahe an der Basis des Hochhauses
liegt,
reduziert werden. Die Lastvektoren (M , M , T ) ausbeliebigen Richtungen
undVerteilungen
können nach diesemMuster bestimmt werden und im M -M -T
-Koordinatensystem aufgetragen
werden.X y Z
Daraus resultiert eine Hüllfläche der Lastvektoren. Die SchubgrössenB Q -
x ref und Q n sind durch die
Lastverteilung
über die Höhe und diezugehörigen
y rst
Biegemomente6 M n und M r bestimmt. Wird der Tragwiderstand zu einer
x ref y ref &
bestimmten
Lastverteilung
mit denverallgemeinerten Spannungen
M , M und Tausgedrückt,
wobei dieBezugsebene
der Last beibehalten wird, so ist für die Last und denTragwiderstand
eingemeinsames Bezugssystem geschaffen.
Für denLastfall Wind ist im ASCE-Artikel
"Strength
Interaction Surfaces for TallBuildings" [Z2]
eine Methode zurErmittlung
derLastgrössen
zusammen mitentsprechenden
Literaturhinweisenangegeben.
Der
Vergleich
der Hüllflächen von Widerstand undLast,
wie er in Bild 1.2durchgeführt
ist, liefert die Lastfaktoren X. Siezeigen
an, um wieviel einebestimmte
Lastkonfiguration gesteigert
werdenkann,
bis der Widerstand desHüllfläche des
Tragwiderstandes
Hüllfläche
derLastvektoren
IM,
BILD 1.2: VERGLEICH VON WIDERSTAND UND LAST
von ähnlicher Form
sind,
ist für dasprojektierte
Hochhaus ein ausgewogenesTragsystem gefunden.
Wie die Horizontallasten aus Wind und Erdbeben zu bestimmen
"sind,
wird indieser Arbeit nicht behandelt.
Ausgangspunkt
ist eine statischeErsatzlast,
die für alleSysteme
über die Höherechteckförmig
(Bild 1.3) verteilt ist.Durch die
proportionale Verteilung
in den dreiBelastungsrichtungen (x,
y und t) wird dieBerechnung
desTragwiderstandes
stark vereinfacht.Am einfachen Raumfachwerk,
Kapitel
3, werden dieErgebnisse
vonrechteckiger
(Bild 1.3) unddreieckiger
(Bild1.4) Lastverteilung
miteinanderverglichen.
Die
Allgemeinheit
der Resultate wirdallerdings weniger
durch die unter¬schiedliche,
statischeLastverteilung
als vielmehr durch die Vernachlässi¬gung
dynamischer
Effekteeingeschränkt.
Die
Gleichungen
derSchnittgrössen
in dergewählten Bezugsebene
B.E. werdenfür k Stockwerke der
gleichen
Höhe 1angeschrieben.
w,ot
wc*'woy
'^x'Qy
k-l
I B.E.
MX, My
BILD 1.3: SCHNITTGROESSEN FUER RECHTECKIGE LASTVERTEILUNG
Q n = w *k* 1
x ref ox
0 r
= w »k* 1 y ref oy
M
k2-l:
x ref ox
M
y ref oy 2
Tz
ref"
"ot***1
(1'1)wox»woy ^x >Qy
wot Tz
MX ,My
£ B.E.
BILD 1.4: SCHNITTGROESSEN FUER DREIECKIGE LASTVERTEILUNG
Q = w k«l
ox 2
y ref oy 2
M w
k2-l:
x ref ox 3
M
k2-!2
-
= w •—=—
y ref oy 3
r k«l
z ref ot 2
(1.2)
Das Verhältnis
Q/T
bleibt für beideLastverteilungen
erhalten, währendM/(Q»k«l)
vom Wert 0.5 fürrechteckige
auf 0.6 fürdreieckige Lastverteilung ansteigt.
Die Vertikallasten werden bei der
Steigerung
der Horizontallasten konstantgehalten.
Sie liefern den Startwert der Normalkräfte in den Stützen und Wän¬den. In den
Riegeln
können dieplastischen
Gelenke von den Stabenden insBalkeninnere verschoben werden. Auf die
spezifischen Bemessungsprobleme
imZusammenhang
mit Vertikallasten wird in dieser Arbeit nichteingegangen.
Diese sind in verschiedenen Büchern und
Forschungsarbeiten
umfassend behan¬delt worden
[A1], [G1], [31].
Die Vertikallasten werden im Rahmen dieser Arbeit direkt in die Stützen ein¬
geleitet.
IhreVerteilung
im Grundriss und ihrUebertragungsweg
von den Deckenund Fassaden zu den Stützen werden nicht untersucht. Annahmen über die Ver¬
teilung
der Vertikallasten in den Stützen werden in den einzelnenKapiteln angegeben.
1.2.2
Stoffgesetz
und GrenzwertsätzeDa bei den weiteren
Untersuchungen
angenommen wird, das Material verhalte sichstarr-idealplastisch,
und dasGleichgewicht
sei am unverformtenSystem
formuliert, können die anschliessendaufgeführten
Grenzwertsätze verwendet werden[T2].
stand
gewählt,
ist diezugehörige Belastung
nichtgrösser
als dieTrag¬
last.
Der statisch
zulässige Spannungszustand
erfüllt dieGleichgewichtsbe¬
dingungen
und die statischenRandbedingungen
einesSystems.
Wenn dieFliessgrenze nirgends
überschrittenwird,
ist derSpannungszustand
stabil.2. Kinematischer Grenzwertsatz (Oberer
Grenzwert)
Wird in einem
System
ein instabiler und kinematischzulässiger Bewegungs¬
zustand
gewählt,
ist diezugehörige Belastung
nicht kleiner als dieTrag¬
last.
Der kinematisch
zulässige Bewegungszustand
erfüllt die kinematischenBindungen
und die kinematischenRandbedingungen
einesSystems.
Wenn dieLeistung
der äusserenBelastung
nicht kleiner ist als dieDissipations¬
leistung,
die aus dem mit demBewegungszustand verträglichen Spannungs¬
zustand ermittelt
wird,
ist derBewegungszustand
instabil.Decken werden im
allgemeinen
alsStahl-,
Stahlbeton- (schlaff armiert undvorgespannt)
oder Verbund-Konstruktionenausgeführt.
In dieser Arbeit werdensie in ihrer Ebene als starr angenommen und können nur aus der Ebene ver¬
formt werden. Wenn die Wände und Stützen konstruktiv
genügend
in den Deckenverankert sind, wird damit die Grundrissform des Gebäudes über die Höhe er¬
halten.
Da im Rahmen dieser Arbeit
speziell
auf die Horizontallasten von Hochhäuserneingegangen
wird, interessiert in den Decken nur derScheibenspannungszu-
stand. Damit können diese
analog
den Schubwänden behandelt werden. Dieeigent¬
liche
Bemessung,
die für dieungünstigste Ueberlagerung
derBeanspruchungen
aus Horizontal- und Vertikallasten zu
erfolgen
hat, ist nichtGegenstand
die¬ser Arbeit. Eine umfassende
Zusammenstellung
über die Plastizitätstheorievon
Stahlbetonplatten
hat Nielsen[N3]
im Bericht desIVBH-Kolloquiums
vonKopenhagen
veröffentlicht.Die Stahlbetonwände werden mit diskreten Fachwerken
nachgebildet,
währendvoll
ausgefachte
Stahlrahmenfelder als ideale Fachwerkegerechnet
werden. DieGrundidee mit den
Spannungsfeldern,
die einem Fachwerkentsprechen,
ist schonin einem
Diskussionsbeitrag
an der TallBuildings.Conference
derLehigh
Uni¬versity
1972[Z1]
behandelt worden. Da dieBedeutung
derUeberlagerung
vonSpannungszustanden
im Stahlbetonelement damals noch nicht erkannt wurde, sind die im erwähnten Artikelangebotenen Lösungsmöglichkeiten unvollständig.
Im
Kapitel
4 werden Stahlbetonwände auf Fachwerkezurückgeführt.
Dadurch sind sie den Stahlfachwerkengleichgestellt
und können mit dengleichen
Berech¬nungsmethoden
behandelt werden. Die einfachen undmehrfeldrigen
Raumfachwerke, die in denKapiteln
3 und 4 untersucht werden,entsprechen
damitgleichzeitig
diskreten
Stahlfachwerksystemen
und Rechenmodellenzusammenhängender
Schub¬wandsysteme
aus Stahlbeton.Die Stäbe von
Rahmensystemen
werden nach ihrerTragfunktion
in Stützen undRiegel
unterschieden. Wenn der Torsionswiderstand der Einzelstäbe und der Einfluss derQuerkraft
auf dieFliessbedingung vernachlässigt
werden, kannder TragwiderstandB für einen StabquerschnittH mit der B -B -N -Interaktion px py p
beschrieben werden. Für
gedrungene Riegel
und Stützen, wie sie bei Hohl¬kasten aus Rahmen (Framed Tubes) und als
Verbindungsbalken
von Schubwänden verwendet werden, muss der Einfluss der Querkraft auf dieFliessbedingung
be¬rücksichtigt
werden. Fürvollständige Lösungen
dürfen diese Elemente nichtmehr die kinematischen
Bindungen
des Stabes aufweisen, sondern müssen als Scheiben behandelt werden.Für die B -B -N -Fliessbedingungen von Stahlbetonquerschnitten wird von
px py p & * i
Vergleich zeigen wird,
reduziert die konservativeEinschränkung
e = Er dieB -N -Interaktion nur unwesentlich, erhöht
jedoch
den Rechenaufwand beträcht- P Plieh. Mit der einheitlichen
Grundlage
einesstarr-idealplastischen Stoffge¬
setzes für Stahl und Beton können mit den B -B ,-N
-Fliessflachen biege-
px py p
steifer Stäbe im
Kapitel
5 räumlicheRahmensysteme
aufmögliche
Interaktions¬formen ihres
Tragwiderstandes
untersucht werden.Weil die Decken in ihrer Ebene starr angenommen
werden,
ist eine axiale De¬formation der
Riegel
nichtmöglich.
DerTragwiderstand
einesRiegels
ist da¬durch mit dem
plastischen
Moment B(q
=0) bestimmt. Da die Decken zudemp n
nach dem ersten Abschnitt
biegeweich sind, genügt
für schlanke Stützen, beidenen die
Riegel
nur in einer Ebenebiegesteif angeschlossen sind,
eineebene
Momenten-Normalkraft-Interaktionsbeziehung,
um denTragwiderstand
desStützenquerschnittes anzugeben.
Im
Kapitel
8 werden mit dem statischen und dem kinematischen GrenzwertsatzNäherungslösungen
für dieB-N-V-Fliessbedingung
von Scheibenelementenherge¬
leitet. Dadurch kann die
Traglast
von Hohlkasten aus Rahmen (FramedTubes),
die durch
gedrungene Riegel-
und Stützenelementeaufgebaut
sind, wie dieTraglast gewöhnlicher Rahmensysteme
bestimmtwerden.,
Unregelmässigkeiten
in denTragsystemen
sind zu vermeiden. Dort wo sie nichtzu
umgehen sind,
wie zumBeispiel
in denEingangshallen,
sind Lastübertra¬gungselemente vorzusehen,
die nicht nur dengleichen plastischen Widerstand,
sondern auch einevergleichbare Steifigkeit
besitzen(dynamische Beanspru¬
chung!
).3. DER TRAGWIDERSTAND VON EINFACHEN RAEUMLICHEN K-FACHWERKEN
In diesem
Kapitel
soll am einfachen Raumfachwerk derZusammenhang
zwischenden
wichtigsten Systemparametern
und der Form desTragwiderstandes möglichst
umfassend formuliert werden. Die
Beziehungen
zwischen den Interaktionsformen und denmassgebenden
Parametern werden diskutiert und auchdargestellt.
Die wesentlichenEinflussfaktoren,
die denTragwiderstand
eines Hochhauses be¬stimmen,
werden mit demgewählten
Raumfachwerk erfasst.Das einfachste
Tragsystem
für ein Hochhaus bildet derausgefachte
Quader von Bild 3.1 mit nur vier Eckstützen im Grundriss. Als Parameter derSystemhöhe
wird die bei der Horizontallast
eingeführte
Stockwerkzahl k übernommen. DieBezugsebene
B.E. wird in der Decke des ersten Stockwerksgewählt.
Damit er¬gibt
sich für die totale GebäudehöheH (k + 1)«1 (3.1)
0 A A
B.E.
A A
+—v
H
V
^b^
-4-4
k-l
JL
B.E.BILD 3.1: SYSTEM
Die Horizontallast im ersten Stockwerk (unterhalb der
Bezugsebene)
wird nichtberücksichtigt.
Diese Annahme wird nurgetroffen,
um in den Resultatenmög¬
lichst einfache Ausdrücke zu erhalten. Der damit
eingeführte
Fehler ist un¬bedeutend.
Den vier Eckstützen wird pro Stockwerk eine konstante Vertikallast AP zuge¬
führt. Die daraus entstehende
Normalkraftverteilung
einer Stütze ist in Bild 3.2aufgetragen.
Die maximale Normalkraftbeträgt
an der BasisP = (k + 1)«AP
o
(3.2)
w
1'
/.\
H=A
F^
(k+1)-l
BILD 3.2:
LASTEN
Der
Tragwiderstand
der Fachwerke wird so bestimmt, dass unterAnwendung
deszweiten Grenzwertsatzes die
wichtigsten,
kinematischzulässigen Bewegungs¬
zustände
(plausible
Mechanismen) untersucht werden.Für ein
System
mitvorgegebenen
Parametern sind imallgemeinen
zweigrund¬
sätzliche Mechanismusmethoden
denkbar,
um die Interaktionsfläche desTrag¬
widerstandes zu bestimmen.
Für eine nicht automatisierte Berechnung& kann die minimale M -M -T -Inter-
x y z
aktionsflache durch Linearkombination der Grundmechanismen - diese sind voneinander linear
unabhängig
- gewonnen werden[N1].
Dabei sind die Mecha¬nismen so zu
kombinieren,
dass die äussereLeistung
stärker wächst als dieDissipationsleistung.
Ein wesentlicher Vorteil muss daringesehen
werden,dass die Resultate in
analytischer
Form erhalten werden können. Dadurch wirdauch die
Abhängigkeit
desTragwiderstandes
von den Parameternformelmässig
sichtbar
gemacht.
Wird das Problem
computergerecht
mit Hilfe vonSpannungs-
undVerschiebungs¬
ansätzen an finiten Elementen - im
vorliegenden
Fall die Fachwerkstäbe - formuliert, kann die M -M -T -Interaktionsfläche punktweise nach dem kine-x y z ^
matischen Grenzwertsatz mit den Methoden der linearen
Programmierung
er¬mittelt werden
[A2].
Bei diesem
Vorgehen geht
es darum, für bestimmteLastkonfigurationen
den minimalen Lastfaktor zu bestimmen. Leider führt dieses Verfahren direkt zunumerischen Werten und nur mit einer
entsprechenden
Parametervariation kön¬nen die
Gesetzmässigkeiten
erkannt werden.In diesem
Kapitel
wird derTragwiderstand
des einfachen Raumfachwerks mit der ersten(analytischen)
Methode bestimmt.Allerdings
wird nicht von denGrundmechanismen sukzessive auf die
Linearkombinationen,
die zur exaktenLösung
führen,geschlossen,
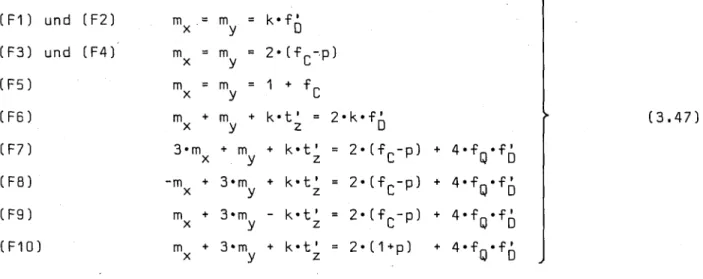
sondern es wird von allen existierenden Mecha¬nismen - also auch den Linearkombinationen - ausgegangen.& & & Die Mx-My-Tz- Interaktionsflächen werden durch bestimmte Kombinationen der
Gleichungen
dieser Mechanismen
festgelegt.
Darauf wird fürjede
diesergewählten
Formen untersucht, welcheBedingungen
dieSystemparameter
für einevorgegebene
Last¬verteilung
zu erfüllenhaben,
damit die angenommene Interaktionsflächegül¬
tig
sein kann. Für dasvorliegende
einfache Raumfachwerk wird vorerst davon ausgegangen, dass mit einer Auswahlplausibler
Mechanismengerade
alle mass¬gebenden gefunden
sind. In einem zweiten Schritt wirdabgeklärt,
in welchem Parameterbereich dieübrigen, möglichen
Mechanismen die Interaktionsfläche beeinflussen. DiesesVorgehen
führt nur bei einfachenSystemen,
für die all¬gemeine Lösungen
überblickbar sind, zu exakten Interaktionsformen desTrag¬
widerstandes. Bei
komplizierteren Systemen
kann eine beschränkte Anzahlplausibler
Mechanismenanalog
diskutiert werden, wobei in diesem Fall nichtim ganzen Koordinatenbereich die minimale Interaktionsfläche
gefunden
wird.3.1
Symmetrisches
RaumfachwerkDas
System
und dieAbmessungen
können dem Bild 3.1 entnommen werden. DieStabfliesskräfte der
Diagonalen
und Stützen sind innerhalb eines Stockwerkskonstant. Die
Normalkraft-Dehnungs-Beziehungen
der Stäbe an der Basis sindin Bild 3.3
dargestellt.
Die Verhältnisse der Fliesskräfte zueinander werden durch die Parameter f„ undfn ausgedrückt.
i S
'
Sf D= fC
"Sf
D
Df=fDSf-
-Df
=fDSf
BILD 3.3: STABFLIESSKRAEFTE
Die
Diagonalenfliesskräfte
sind über die Höheabgestuft
und verlaufen minde¬stens
proportional
zurQuerkraftverteilung
aus denLastkomponenten
w und¦w . Mit dieser Definition kann die minimale Summe der
Diagonalenwiderstände
oy
vom zweiten bis zum r-ten Stockwerk aus Bild 3.4 ermittelt werden.
k_r+1
r 2-k-r+1
\ Dfi^rL±TLl'^
-fQR*Df
i=k
(3.3)
Mit
f„R
ist damit ein Parameter für dieDiagonalenfliesskraftsumme
einer Fachwerkscheibe zwischen den betrachteten Stockwerken definiert worden.Wird für
k-r+1
Z DP. = fn(r)«D,
i=k fi Q (3.4)
geschrieben, folgt
dieUngleichung
des neuen Parameters zuf (r) > f -
£.2Jil£il
V j - QR k 2
(3.5)
Wenn die
Diagonalen
über k Stockwerke einer Fachwerkscheibe fliessen(r=k),
vereinfacht sich der Ausdruck(3.5)
zu, ,n v k+1
Vk) -~r
(3.6)j
1Querkrafl
r
i
2VerteiluneJ
k-r
3 k-r+1
k-1
rB.E. j
ka>
JC i_
a>
5
je u o (fi
Df/k Df-2/k
Df-(k-r+1)/k
Df-(k-1)/k Df
BILD 3.4: DIAGONALENFLIESSKRAEFTE D fi
Mit einer Auswahl
plausibler
Mechanismen können diemassgebenden Gleichungen
der M -M -T -Interaktionsfläche für die Traglast des Systems ermittelt wer-
x y z t= j
den. Für das
symmetrische
K-Fachwerkgenügt
es, dieGleichungen
für denposi¬
tiven Koordinatenraum herzuleiten. Unterschieden wird zwischen Stockwerk¬
mechanismen, bei denen nur Stäbe zwischen zwei Deckenebenen
fliessen,
undSystemmechanismen,
bei denen die Stäbe mehrerer Geschosse oder über die ganzeSystemhöhe
ins Fliessen kommen. DieAusdehnung
der Fliessbereiche einer Fach¬werkscheibe ist von der
Abstufung
der Stabfliesskraft über die Stockwerkeabhängig.
Vorerst werden die
Traglasten
der sechsgewählten
Mechanismen von Bild 3.5 ermittelt.Systemmechanismen,
bei denen dieDiagonalen
nicht über die ganze Höhe der Fachwerkscheibe fliessen, und Stockwerkmechanismen oberhalb der Basis werdenausgeschlossen.
Dieentsprechenden Bedingungen
derSystempara¬
meter werden
später
formuliert undüberprüft.
(1)
Symbol
Druckfliessen
derDiagonalen
(2)
Symbol
©—©
Druckfliessen
der Stützen| Drehachse
Zugfliessen Druckfliessen (3)
d*
Drehachse
^ I
V\
r---4
i D*
|
c>A *-y
&
--,l
"5Drehachse
d-
(5) (6)
o Fliessen
einer Stütze
auf Druck•
Fliessen
einerStütze auf Zug
=Fliessen einer
Diagonale
aufDruck
—Fliessen der Diagonalen
einerFachwerkscheibe
aufDruck
BILD 3.5: MECHANISMEN
Die kinematischen
Bindungen
für den ersten Mechanismus, bei dem dieDiagona¬
len der beiden Fachwerkscheiben in der x-z-Ebene an der Basis auf Druck fliessen, können Bild 3.6 entnommen werden
* d
6H
=Vb
(3.7)Bei
Anwendung
desPrinzips
der virtuellenLeistung
lassen sich die äussereLeistung
L und dieDissipationsleistung
L . anschreibena u
wox*k,1,öH
(3.8)2'VÖD
(3.9)Mit der
Bedingung
L -L. > 0, derVerwendung
der kinematischenBeziehung (3.7),
a u —
der
Erweiterung
derLeistungsausdrücke
L und L . durch k*l/S. und der Be¬achtung
derSchnittgrössen (1.1)
resultiert für den ersten Mechanismus dieUngleichung
nx
ref ,°f
k-1 , . 1b«S_ x — S. d D d
(3.10)
Für den zweiten Mechanismus lassen sich die kinematischen
Bindungen
aus Bild3.7 herauslesen:
UH
b(3.11)
Wird die
Beziehung
(3.11) in denGleichungen
für dieLeistung verwendet,
lauten die auf das
plastische Verformungsinkrement 6g bezogenen
Ausdrückefür L und L.:
a ü
S k« 1 •
L = w •k'l-r?«^ + 2»P «6C
a ox b 2 o S (3.12)
Ld
" 2*WÖS
(3.13)^b^r- U4-
BILD 3.6 BILD 3.7
Mit der
Bedingung
L -L .>_
0 und nachErweiterung
der Ausdrücke mit1/Sf
er¬gibt
sich unterBeachtung
derSchnittgrössen (1.1)
^ff
=mx
>2.fc
-2-^= 2.(fc-p) (3.14)
Für den dritten Mechanismus können wieder die kinematischen
Beziehungen
vonBild 3.7 verwendet werden. Die
Gleichungen
für dieLeistungen
lauten dem¬nach:
6 6
La
="ox'^-lPi1
+woy*k>1-F-¥
+Po'h
"Po'h
(3"15>Ld
"WSS
+V5S
(3-1B)Mit der
Bedingung
L -L . > 0folgt
schliesslichüg-gSl
+ÜHÜ
" m ? m > 1 ? f„ (3.17)b«S_p
b'S- x y— CFür den vierten Mechanismus wird die kinematische
Beziehung
(3.7) von Bild3.6 übernommen und zusätzlich wird das
Verdrehungsinkrement
ö auf der Dreh¬achse (Mechanismus 6, Bild 3.5) mit 6,,
verknüpft
6R
=b'b (3.18)
In den
Gleichungen
für dieLeistungen
werden dieplastischen Verformungsin-
kremente auf
6R bezogen
Vd Vd Vd
L = W 'k'1'zrr-r— + w •k-l'—r— + w ,
•k•1—=-z— (3.19)
a ox 2«b oy 2*b ot b2
Ld
=2«Df«öD
(3.20)Mit der
Bedingung
La-Lq. —> 0 und unterBerücksichtigung
derSchnittgrössen
(1.1)ergibt
sich nachErweiterung
derGleichungen
für dieLeistung
mitk-l/(Sf-d)
Mx
refny
ref _Tz
ref k«l x , k«l ^ _Df
k«l -c~s— + u c— + u o—•-n- = m + m + t •—r— > 2«-s—•—-j— =b«S- b*S_p b'S- b x y z b — S„ d
=
2-k-fD-i (3.21)
Die kinematischen
Beziehungen
für den fünften Mechanismus können aus Bild 3.8herausgelesen
werden, wobei alleDiagonalen
dengleichen plastischen
Verkürzungszuwachs 8n
erfahren.-r-»k«l = ö-b
b und Ön'TT'k = Ö«2«b
D b
(3.22)
i>-2-b
i-b4 Ir-b-ir
BILD 3.8
Werden die
plastischen Verformungsinkremente
aufh bezogen,
lauten die Glei¬chungen
für dieLeistungen
• • • • .
L„ = w„»k«1-x'—=— + w »k^l••£••=¦ + w , «k'l»^ + P •—i—=-
a ox 2 2 oy 2 2 ot 2 o k«l (3.23)
• • •
2«b2
•b2
d ._. fi D C f S Q f k*d C f k*l (3.24)
Mit der
Bedingung
L -L . > 0ergibt
sich nachErweiterung
mit2«k»l/(b2«S£)
au— T
Q x ref ^ y ref _,_ z ref k«l
3*—: = + —!*—= + —: = •—:
b'Sn b»S,
b«Sf
b 3-m+ m + t '—r" >
4»fn»W^-i
x y zb— Q S. d
+
2*V 2T
A.f0.fD.i.d + ?• ffC-niPJ(3.25)
Die kinematischen
Bindungen
für den sechsten Mechanismusergeben
sich ausBild 3.9 zu
-r—«k«l =
ö*b
undb
r. _
b'bz
. x l?
ö»b2
°D
" k«d°S*d
" ^*k«d (3.26)U4
?z 8s^
U-X
BILD 3.9
Werden die
plastischen Verformungsinkremente
wieder aufb bezogen,
so lauten dieGleichungen
für dieLeistungen
L= = w w•k• 1*—••=¦ + w •k'l'-s-*— + w .•k-l-TT + P •¦:—=—
a ox 2 2 oy 2 2 ot 2 o k*l (3.27:
• • •
2«b2
•b2
Ld i^1 Ufi ÖD +C bf °S +Q Uf
° k'd Cbf
Ü k-1 (3.28)Mit der
Bedingung
L -L._>
0ergibt
sich nachErweiterung
mit 2«k*1/(b2
«Sn)x ref ^ y ref ^ zrefk'l ^ ^ , k«l . . n fl
———— + J — + —•—7— = m + m + t •—r— > 4*fn«-p—«-T +
b*S_p
b'S_b«S_p
b x y zb—QSfd
P ,
+ ^2*f - 2«— = 4»f »f •— + 2«(f -ü)
TC ^ Sr Q D d Z lTC PJ (3.29)
Nach dem kinematischen Grenzwertsatz muss die
Traglast
(in den Formeln mitdem Index p versehen) jeweils kleiner oder höchstens
gleich
der Lastkombina¬tion
sein,
die aus denaufgeführten
Mechanismen gewonnen wurde. Werden dieAbkürzungen
M
x ref b-S„
M ref
,, _ z
ref.l
_z
b-Sf
bvS-
f' = f •—
rD D d '
b-S,
(3.30)
eingeführt,
so lassen sich dieUngleichungen
für dieTraglast
der sechs ge¬wählten Mechanismen wie
folgt
anschreiben:V-k*fD (3'31)
m <
2«(fc-p) (3.32)
m + m < 1 + fn
(3.33)
px py - C
m + m + f »k < 2'k'f' (3.34)
px py pz — D
3«m „
+ m + t* 'k < 2-(f_-p) + 4-fn»f' (3.35)
px py pz — C ^ Q D
m + m + t' -k < 2«(f„-p) + 4«fn«f' (3.36)
px py pz — C H Q D
Bevor nach weiteren
möglichen
Mechanismengefragt wird,
sind dieBeziehungen (3.34)
und (3.36) miteinander zuvergleichen.
Dabei wirdgefordert,
dass imVergleich
der rechten Seiten dieUngleichung
2«k'f£
<2»(fc-p)
+4*fQ,fö
(3.37)resultiere,
oder nach dem ParameterfQ aufgelöst
k
fC~p
fQ
> 2 "2^f\T (3.38)
Die Werte
(fp-p)
und f' können nurpositiv
sein. DieMinimalbedingung
fürden Wert von
fn
ist in derBeziehung (3.6) festgelegt.
Damit ist die Un¬gleichung
(3.37) für dasgewählte
K-Fachwerk immergültig
und derSystem¬
mechanismus, der zur
Ungleichung (3.36) geführt
hat, wird deshalbverunmog¬
licht.
Für den
positiven
m -m -t' -Koordinatenraum müssen die Ungleichungen (3.31)p* py pz B
und
(3.32)
noch für diey-Richtung angeschrieben werden,
während die Beziehun¬gen
(3.33)
und(3.34)
durch ihrensymmetrischen
Aufbau für beideHauptrich¬
tungen gültig
sind. Der fünfte Mechanismus mit derzugehörigen Ungleichung
(3.35) kann zu acht Fällenergänzt
werden, wenn nur diemassgebenden
Mecha¬nismen, die zu
Ungleichungen
mit mindestens zweipositiven
Vorzeichen in denKoordinaten m , m und t' führen, berücksichtigt werden. Die möglichen
px py pz • = =
Kombinationen sind im Bild 3.10 in der
Symboldarstellung
mit den Lastvor¬zeichen
(Pfeilrichtungen) aufgezeichnet.
Diezugehörigen Ungleichungen
könnendamit in der
Reihenfolge
der für m > mmassgebenden
erstenGruppe
von Mechanismen formuliert werden:3*mpx
+mpy
+k,tPz 1 2^Vp)
+4'Vfd (3'39)
3*mpx
"mpy
+k,tpZ i 2*(1+p)
+4*VfD (3-40)
-3*mPx+ mPy
+k,tPz
-2*(1+p)
+4*Vfö
(3-4n3«m + m - k't" < 2*(1+p) + 4«fn«f'
px py pz — K QD (3.42:
Für f < 1 werden die
Beziehungen (3.40),
(3.41) und (3.42) durch (3.39) eliminiert.mpx
-mpy
-
W Eb: S0 ig
mpx ^ nripy
>1
®-
N I \
^
?
~®
°
Fliessen
der Stütze auf Druck• Fliessen der Stütze auf
Zug
positive
Lastvorzeichen :|
xFliessen der
Diagonalen
einer
Fachwerkscheibe
BILD 3.10: SYMBOLDARSTELLUNG DER SYSTEMMECHANISMEN
Die Ungleichungen& to der für m < m massgebenden zweiten Gruppe von Mechanis-
px — py ö rr
men lauten:
m + 3«m + k«f < 2«(1+p) + 4«fn«f'
px py pz — r Q D
m - 3«m + k't' < 2«(fP-p)+ 4'fn-f'
px py pz — C ^ Q D
-m + 3«m + k't' < 2«(fr-p)+ 4'fn-f'
px py pz — C K Q D
m + 3«m - k't' < 2«(fr-p)+ 4«fn«f'
ny nu n7 — R ^ LI n
px py pz Q D
(3.43)
(3.44)
(3.45)
(3.46)
Die
Beziehungen (3.43),
(3.45) und (3.46) könnengleichzeitig
auftreten. Da¬gegen
nisrt.
gegen wird die Ungleichung (3.44) im Bereich m < m durch (3.45) elimi-
6 & & &
px — py
Werden, wie in diesem Abschnitt
vorausgesetzt, Systemmechanismen,
bei denendie