Research Collection
Doctoral Thesis
Cognitive Modeling of Information Sources for Human Wayfinding under Uncertainty
Author(s):
Dubey, Rohit K.
Publication Date:
2020-10
Permanent Link:
https://doi.org/10.3929/ethz-b-000459996
Rights / License:
In Copyright - Non-Commercial Use Permitted
This page was generated automatically upon download from the ETH Zurich Research Collection. For more information please consult the Terms of use.
ETH Library
d i s s . e t h n o . 2 7 0 4 5
C O G N I T I V E M O D E L I N G O F I N F O R M AT I O N S O U R C E S F O R H U M A N WAY F I N D I N G U N D E R
U N C E R TA I N T Y
A dissertation submitted to attain the degree of d o c t o r o f s c i e n c e s of e t h z ü r i c h
(Dr. sc. ETH Zürich)
presented by r o h i t k . d u b e y
Master of Science, NTU, Singapore in Digital Media Technology
born on 01 September 1981 citizen of India
accepted on the recommendation of Prof. Dr. Robert W. Sumner, examiner Prof. Dr. Christoph Hölscher, co-examiner
Prof. Dr. Dinesh Manocha, co-examiner
2020
ing Under Uncertainty ,©2020 d o i:27045/ethz
A B S T R A C T
The growth in the global population and rapid urbanization has put tremen- dous stress on existing infrastructures. The increasing influx of people in built environments such as transportation hubs, hospitals, office and educa- tional buildings, and shopping malls has become a cause of concern. The ability to maintain wellbeing and people’s comfort in a densely populated, large, and complex building during a general circulation or disaster is an essential design issue. This issue is equally relevant when considering yet-to-be-built environments of the future. Architects, designers, and plan- ners must rely on their expertise and intuition when accounting for how people navigate when designing spaces, which becomes prohibitive when accounting for the myriad of contexts that spaces must accommodate. A critical challenge towards managing and designing built environments is understanding (from a cognitive perspective, "User in Mind") how humans rely on various external indicators when navigating in these spaces.
Human wayfinding in a complex built environment is a dynamic process that is mentally demanding. It involves the acquisition, processing, and in- terpreting multiple wayfinding information sources in an environment and the head (i.e., spatial memory) to aid in route planning. These information sources include environmental landmarks, signage, spatial features, the presence and behavior of other people, and spatial memory of a familiar environment. These information sources are filled with uncertainty, often contradict one another, and are a dominating factor for individuals getting lost in complex environments. The ability for people to find their way is a critical function of built space and has far-reaching implications on the intended usage of a building, the quality of life of its inhabitants, and for security and disaster prevention.
This thesis attempts to model how humans acquire, perceive, and in- terpret information sources in their surroundings (e.g., signage, spatial features, crowd characteristics, and familiarity of the environment) when navigating in complex indoor environments. The main goal is to develop a cognitively grounded computational framework of human wayfinding, which models the uncertainty and fusion of multiple potentially conflicting information sources. The research can potentially have a transformative impact on our understanding of the cognitive underpinnings of human wayfinding, and enhance practices for architects, urban planners, and civil iii
applications as well as aid in the design of smart and connected environ- ments.
iv
Z U S A M M E N FA S S U N G
Das Wachstum der Weltbevölkerung und die rasante Urbanisierung haben zu einer enormen Belastung der bestehenden Infrastrukturen geführt. Der zunehmende Zustrom von Menschen in gebauten Umgebungen wie Ver- kehrsknotenpunkten, Krankenhäusern, Büro- und Bildungsgebäuden sowie Einkaufszentren ist zu einem Grund zur Sorge geworden. Die Fähigkeit, das Wohlbefinden und den Komfort der Menschen in einem dicht besiedel- ten, großen und komplexen Gebäude während eines allgemeinen Umlaufs oder einer Katastrophe aufrechtzuerhalten, ist eine wesentliche Designfrage.
Diese Frage ist ebenso relevant, wenn man die noch zu bauenden Umgebun- gen der Zukunft betrachtet. Architekten, Designer und Planer müssen sich auf ihr Fachwissen und ihre Intuition verlassen, wenn es darum geht, wie sich Menschen bei der Gestaltung von Räumen zurechtfinden, was bei der Berücksichtigung der unzähligen Kontexte, denen Räume gerecht werden müssen, unerschwinglich wird. Eine entscheidende Herausforderung für das Management und die Gestaltung gebauter Umgebungen ist das Ver- ständnis (aus einer kognitiven Perspektive, Üser in Mind"), wie Menschen sich auf verschiedene externe Indikatoren verlassen, wenn sie in diesen Räumen navigieren.
Die menschliche Wegfindung in einer komplexen gebauten Umgebung ist ein dynamischer Prozess, der geistig anspruchsvoll ist. Er beinhaltet die Aufnahme, Verarbeitung und Interpretation mehrerer Informationsquel- len zur Wegfindung in der Umgebung und im Kopf (d.h. das räumliche Gedächtnis), um die Routenplanung zu unterstützen. Zu diesen Informa- tionsquellen gehören Orientierungspunkte in der Umgebung, Beschilde- rungen, räumliche Merkmale, die Anwesenheit und das Verhalten anderer Personen sowie das räumliche Gedächtnis einer vertrauten Umgebung.
Diese Informationsquellen sind mit Unsicherheiten behaftet, widersprechen sich oft und sind ein dominierender Faktor dafür, dass sich Menschen in komplexen Umgebungen verirren. Die Fähigkeit des Menschen, sich zurechtzufinden, ist eine kritische Funktion des gebauten Raums und hat weitreichende Auswirkungen auf die beabsichtigte Nutzung eines Gebäu- des, die Lebensqualität seiner Bewohner sowie auf die Sicherheit und den Katastrophenschutz.
In dieser Arbeit wird versucht zu modellieren, wie Menschen bei der Navigation in komplexen Innenräumen Informationsquellen in ihrer Um- v
schenmenge und Vertrautheit der Umgebung) erfassen, wahrnehmen und interpretieren. Das Hauptziel ist die Entwicklung eines kognitiv begrün- deten computergestützten Rahmens für die menschliche Wegfindung, der die Unsicherheit und Fusion von mehreren potenziell widersprüchlichen Informationsquellen modelliert. Die Forschung kann unser Verständnis der kognitiven Grundlagen der menschlichen Orientierung verändern und die Praxis von Architekten, Stadtplanern und Bauingenieuren verbessern, indem sie Echtzeit-Anwendungen für das Management von Menschenmen- gen, Katastrophen und Sicherheit ermöglicht und bei der Gestaltung von intelligenten und vernetzten Umgebungen hilft.
vi
A C K N O W L E D G E M E N T S
My effort to pursue human wayfinding research would not have happened without thanking the following people. First and foremost, I would like to thank my three Ph.D. advisors who made it possible for me to write a dissertation in such an exciting inter-disciplinary field: Prof. Christoph Hoelscher for initially offering and accepting me as a Ph.D. student in his team and advising me throughout my Ph.D. Prof. Robert W. Sumner for accepting me as his Ph.D. student in the Computer Science Department.
Prof. Mubbasir Kapadia, for his invaluable suggestions, meetings, and guidance throughout my Ph.D. I am very proud of having been a part of DINFK and DGESS at ETH. I would also like to thank Ms. Anita Schärer for her kindness and support for all administration purposes at the Chair of Cognitive Science.
Second, I will like to acknowledge all the collaborators that I had the great pleasure of working with on multiple projects during my Ph.D. I am deeply grateful to Dr. Victor R. Schinazi, Dr. Tyler Thrash, and Sam S. Sohn for showing me what it means to work with the very best in their respective field. I will also like to thank Michal Gath Morad and Hantao Zhao for their multiple discussions and research insights.
Third, I will like to thank all the wonderful people in my team and in general at the Future Cities Laboratory, Singapore ETH Centre, for always being supportive and helpful. I would especially like to thank Michael R.
Joos, Tanvi Maheshwari, and Geraldine Ee for fantastic discussions during numerous lunches. Many thanks to Dr. Panos Mavros for leading our group at Future Cities Laboratory with a smile and friendly temperament.
In the end, I would like to thank all my friends for their support and encouragement. I will like to give my deepest gratitude to my parents for always loving me and being a grounding force in my life. I would especially like to thank my partner, who supported and inspired me throughout this journey. Priya, this Ph.D. would not have been possible without your unconditional love and presence in my life.
vii
Contents
1 i n t r o d u c t i o n 1 1.1 Motivation 1 1.2 Challenges 3
1.3 Research Objectives 4 1.4 Overview 5
1.5 Principal Contributions 6 1.6 Structure of Dissertation 10 1.7 Publications 12
2 p r i o r w o r k 15
2.1 Human Wayfinding 15
2.2 Information Sources for Human Wayfinding 16 2.2.1 Signage 17
2.2.2 Space 17 2.2.3 Crowd 18
2.2.4 Spatial Memory 19
2.3 Landmarks as Cues to Build Cognitive Map 20 2.3.1 Outdoor Landmark Extraction 20 2.3.2 Indoor Landmark Extraction 21 2.4 Computational Model of Wayfinding 21 2.5 Multivariate Decision Making Models 23
2.5.1 Dempster-Shafer Theory 24 2.5.2 Information Theory 25
2.6 Behavioural Study in Virtual Reality 26
3 e x p e r i m e n ta l ly-d r i v e n c o g n i t i v e m o d e l i n g o f i n f o r- m at i o n s o u r c e s 29
3.1 General formulation of information sources for wayfind- ing 29
3.1.1 Signage 30 3.1.2 Space 30 3.1.3 Crowd 31 3.1.4 Memory 32
ix
3.1.5 History of Past Information 32
3.2 General formulation of experimental design 33
3.3 Information-Theoretic Fusion of Multiple Information Sources Under Uncertainty 35
3.3.1 General Formulation 35
3.3.2 Information-Theoretic Approach for Multi-variate Information Fusion 36
3.4 Cognitive Agent Model of Human Wayfinding 38 3.4.1 Visual Perception and Spatial Memory 38
3.4.2 Muti-variate Information Procession and Fusion 39 3.4.3 Multi-scale Wayfinding 39
4 m o d e l i n g h u m a n-s i g na g e i n t e r a c t i o n f o r way f i n d- i n g 41
4.1 Overview 41 4.2 Introduction 42 4.3 Preliminaries 43
4.3.1 Signage and Environment Model 43 4.3.2 Agent Model 44
4.4 Quantifying Wayfinding Information in a Sign 46 4.4.1 Experiment1: Sign Visibility as a Function of Obser-
vation Angle and Distance 48
4.4.2 Experiment2- Relationship between decision-making confidence and the visibility of a sign 51
4.5 Information-Theoretic Model of Agent Wayfinding 54 4.5.1 Exploration Phase 55
4.5.2 Decision Node Phase 55 4.5.3 Signage Discovery Phase 55 4.5.4 Information Gain Phase 56 4.5.5 Execute Signage Phase 57 4.5.6 Disorientation Phase 57 4.5.7 Fail-Safe Phase 58
4.6 VR based Experimental Optimization and Evaluation of Agent Wayfinding Model 58
4.6.1 Design 58 4.6.2 Procedure 59 4.6.3 Participants 60 4.6.4 Results 60
4.6.5 Parameter Computation 62
4.6.6 Simulation Results and Validation 65
c o n t e n t s xi
4.7 Summary and Outlook 66
5 m o d e l i n g t h e i n f l u e n c e o f s pat i a l l ay o u t o n way f i n d- i n g 69
5.1 Overview 69 5.2 Introduction 70 5.3 Overview 72
5.3.1 Preliminaries 72
5.3.2 Data-Driven Extraction of Descriptive Spatial Fea- tures 73
5.3.3 Experimentally Derived Mapping of Space to Human Wayfinding 74
5.3.4 Spatial Cognition-Driven Layout Optimization 74 5.3.5 Results and Experimental Validation 74
5.4 Data-Driven Extraction of Descriptive Spatial Features 75 5.4.1 Real-World Floor plan Database 75
5.4.2 Isovist-based Categorization of Intersections 76 5.5 Experimentally Derived Mapping of Space to Human Wayfind-
ing 78
5.5.1 The Influence of Isovist Measures on Human Route Choice 78
5.5.2 Partial Isovist Measures-to-Route Choice Behaviour Mapping 81
5.6 Space Optimization Based on Human Wayfinding 82 5.6.1 Gradient Descent-Based Optimization Formulation 82 5.6.2 Geometry-to-Partial Isovist Measures Mapping 86 5.6.3 Design Constraints 88
5.6.4 Computation of Desired Route Choice 89 5.6.5 Cost Function 90
5.7 Results & Applications 91
5.7.1 Quantitative Evaluation 91
5.7.2 Comparison to Baseline and Expert-based Design 93 5.8 Validation : Comparison to Baseline and Expert-based De-
sign 94
5.8.1 Participants. 94 5.8.2 Materials. 95 5.8.3 Procedure. 96 5.8.4 Design. 96 5.8.5 Results. 97
5.9 Summary and Outlook 99
6 c o g n i t i v e pat h p l a n n i n g w i t h s pat i a l m e m o r y d i s t o r- t i o n 101
6.1 Overview 101 6.2 Introduction 102
6.3 Dynamic Hierarchical Cognitive Graph (DHCG) 105 6.3.1 Clustering Metric for Landmarks 105
6.3.2 Distortion in Spatial Memory 107 6.3.3 Memory Decay 108
6.3.4 Agglomerate Hierarchical Clustering 109 6.3.5 Evaluation 110
6.4 Cognitively-Based Path-Planning 111 6.4.1 Abstract Subgraph Construction 112 6.4.2 Abstract Subgraph Pathfinding 112
6.4.3 Introducing Distortions in Fine-To-Coarse Planning 113 6.4.4 Parameterizing Agglomerative Hierarchical Cluster-
ing 113
6.5 Behavioural Experiment 114 6.5.1 Purpose 114
6.5.2 Design 115 6.5.3 Procedure 115 6.5.4 Participants 116
6.5.5 Parameter Computation 117 6.5.6 Results 118
6.6 Validation : Cognitive Path-Planning 121 6.6.1 Preliminaries 121
6.6.2 Sequence Order Effect 122
6.6.3 Impact of Exploration Duration 123
6.6.4 Distortion Effect: Categorical Adjustment 124 6.7 Cognitive Agent Simulation on a Manhattan Grid 125
6.7.1 Distortion due to Category Adjustment 128 6.7.2 Distortion due to Sequence Order Effect 128 6.8 Summary and Outlook 128
7 f u s i o n-b a s e d way f i n d i n g p r e d i c t i o n m o d e l f o r i n f o r- m at i o n s o u r c e s 131
7.1 Overview 131 7.2 Introduction 131
7.3 Dempster-Shafer Theory 133
7.4 Agent Wayfinding Prediction Model 134 7.4.1 General Formalism 134
c o n t e n t s xiii
7.4.2 Quantifying Directional Information from Multiple Sources 135
7.4.3 Framework1: Dempster-Shafer-Theoretical Approach 137 7.4.4 Framework2: Information-Theoretical Approach 138 7.4.5 Agent Decision Model 140
7.5 Experiments 140
7.5.1 Effects of Reinforced and Contradictory Combinations of Multiple Information Sources 141
7.5.2 Influence of Memory 143
7.5.3 Generalization of The Proposed Model 144 7.6 Summary and Outlook 145
8 au t o s i g n: a m u lt i-c r i t e r i a o p t i m i z at i o n a p p r oa c h f o r s i g na g e d e s i g n 147
8.1 Overview 147 8.2 Introduction 148
8.3 AUTOSIGN - A Computer-Aided Signage Optimization Frame- work 150
8.3.1 Initial Building Design 150
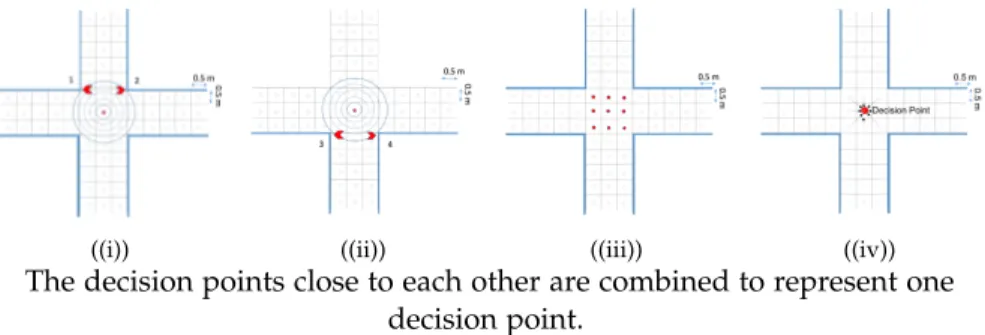
8.4 Computer Aided Signage Design Work-flow 151 8.4.1 Decision Point Extraction 151
8.4.2 Navigation Graph: Multiple Path Generation 153 8.4.3 Initial Signage Placement 153
8.5 Multi-Criteria Optimization Formulation 154 8.5.1 Route Choice Based Optimization 154
8.5.2 Signage Coverage Area Based Optimization 157 8.6 Optimization & Experimental Results 159
8.6.1 Performance Analysis 159 8.6.2 Signage Coverage Area 161
8.6.3 Agent-Based Simulation to Assess Wayfinding Perfor- mance Across Signage Layouts 162
8.7 User Evaluation 166
8.7.1 System Usability Test 167
8.7.2 Expert-Based VR Walk-through To Assess Wayfinding Across Signage Layouts: 168
8.8 Summary and Outlook 170
9 i d e n t i f y i n g i n d o o r nav i g at i o na l l a n d m a r k s 173 9.1 Overview 173
9.2 Introduction 174 9.3 Object Salience 176
9.3.1 Visual Salience 177 9.3.2 Spatial Salience 179 9.3.3 Subjective Salience 181
9.4 Hierarchical Representation of Object Salience 182 9.4.1 Hierarchical Composite Weighted TOPSIS 183 9.5 Indoor Navigation Landmark Identification 187
9.5.1 Visual Attention-Based Salient Object 188
9.5.2 Optimized Weights: Using Particle Swarm Optimiza- tion 188
9.6 VR Experiment with Eye-Tracking 189 9.6.1 Design 189
9.6.2 Procedure 189 9.6.3 Participants 190 9.6.4 Results 190
9.7 Results and Validation 191 9.8 Summary and Outlook 193 10 c o n c l u s i o n 195
10.1 Discussion 195
10.2 Understanding from Computational Cognition 197 10.3 Implications 198
10.4 Limitations and Future Work 199
10.4.1 Spatial-Cognition Driven Layout Optimization to Nudge Occupants’ Route Choice Behavior in Buildings 202 10.4.2 AUTOSIGN: A multi-criteria optimization approach to computer aided design of signage layouts in com- plex buildings 202
10.4.3 Indoor landmark Identification 203 a a p p e n d i x 205
a.1 Supplementary Materials for Chapter4 205 a.2 Supplementary Materials for Chapter5 207 a.3 Intersection Clustering Results 207
a.4 Behavioural Experiment: The Influence of Isovist Measures on Human Route Choice 208
a.4.1 Isovist Measures 208
a.4.2 Computation of Partial Isovist during Wayfinding 208 a.4.3 Visualisation of significant isovist measures 213 a.5 Space Optimization Based on Human Wayfinding 214 a.6 Validation Experiment: Comparison to Baseline and Expert-
based Design 214
c o n t e n t s xv
a.7 Supplementary Materials for Chapter8 217 a.8 Decision Point Extraction TestCases 218 b i b l i o g r a p h y 223
1
I N T R O D U C T I O N
The first principle is that you must not fool yourself and you are the easiest person to fool.
— Richard Feynman This chapter begins with the research objective, followed by a pragmatic description of the motivation and challenges that need addressing. We then present an overview of the research design to mitigate these challenges, followed by highlighting the principal contributions of this research. The structure of the thesis is described at the end, along with the list of peer- reviewed publications that resulted from this thesis.
1.1 m o t i vat i o n
Wayfinding and orientation in built environments are essential aspects of people’s daily lives. Basic activities such as shopping, commuting, and socializing require people to navigate from one place to another. Human wayfinding involves selecting and moving along a route to a destination in an environment [1], and requires the acquisition, processing, and interpre- tation of multiple sources of information, to aid in route planning. These information sources include environmental landmarks, signage, structural, spatial features (e.g., the width and orientation of a corridor), the presence and behavior of crowd (e.g., an oncoming crowd may detract you from taking that direction), and past recollection of the environment from mem- ory. These information sources are often permeated with uncertainty (i.e., inaccuracy of target information and location), often contradict one another, and thus, instead of facilitating wayfinding becomes dominating factors for occupants’ getting lost and stressed in complex environments. The ability for people to find their way is a critical function of built space and has far-reaching implications on the intended usage of a building, the quality of life of its inhabitants, and for security and disaster prevention.
For successful wayfinding, occupants need wayfinding information cues within their environment (i.e., knowledge in the world) or representations of spatial knowledge about their environment (i.e., knowledge in the head).
Norman introduced the term knowledge in the world as an external in- 1
formation [2]. There are various types of "knowledge in the world" (i.e., external knowledge) [3] that can help occupants find their way, such as signs, maps, landmarks, and fixed geometric aspects of the environment [1, 4–6]. Norman argued that to reduce mental load and for stress-free wayfind- ing, it is vital to have much of the knowledge in the world than storing it as internal knowledge in the head. Moreover, for unfamiliar environments, knowledge in the world is essential, because occupants do not have a previ- ously acquired spatial knowledge of the environment in the head and are there for the first time. Human wayfinding is also influenced by a variety of factors that originate from the physiological (e.g., eyesight, height) and psychological (e.g., perception and interpretation) aspects of an individual.
Other factors, such as occupants background, age, gender, level of stress, and grouping behavior, can also potentially influence wayfinding perfor- mance. Although it is possible to investigate the factors as mentioned above individually, it is considered unnecessary due to enormous effort. More- over, these investigations do not reveal about human interaction with the environment. They reveal more about the individual wayfinding differences between individuals [7]. Research has also demonstrated that factors such as age, gender, and background have a minor impact on the wayfinding outcome [8,9].
The focus of this dissertation is to develop a computational model of human wayfinding based on knowledge in the world and knowledge in the head. Other factors, as mentioned above, are excluded and left for future research. In this thesis, we elect three crucial information sources to model knowledge in the world.
1. Signage plays an essential role in occupants’ wayfinding performance and is a crucial wayfinding cue in the environment.
2. Three spatial factors proposed by Weisman [6] ((a) visual access, (b) the degree of architectural differentiation, (c) floor plan configuration are grouped together into one factor (i,e,m spatial layout).
3. The influence of crowd as critical wayfinding cues in the world.
To model knowledge in the head, we investigate the mental representation of space in people’s memory for a familiar environment [10,11]. Given the limited work done in these areas and the absence of a multi-modal decision- making framework for human wayfinding, we are motivated to address the gap by focusing on four critical directional sources that influence human wayfinding in isolation, and also in various combinations of reinforced and contradicted information sources.
1.2 c h a l l e n g e s 3
1.2 c h a l l e n g e s
Wayfinding is a goal-directed coordinated movement that involves the plan- ning of a route and moving along it in an environment [1]. With the rapid increase in population and urbanization, the existing infrastructure (e.g., transit hubs, shopping malls, hospitals, office buildings) often witnesses large numbers of occupants. Facilities such as sporting and entertainment venues can attract70,000avid fans. Large transportation hubs such as the New York Grand Central accommodate200,000passengers daily. The of- fice builds such as the former New York World Trade Center office, and retail complex was reported to have up to50,000employees and 80,000 daily visitors. O’Hare international airport in Chicago had over6,800,000 passengers in September2016and over7,300,000in August of2016 [12].
In order to accommodate this increase in the number of occupants, exist- ing and future buildings are becoming larger and complex in structure.
The ambitious and intricate architectural design to accommodate more crowd in an indoor complex built environment may pose multiple prob- lems for building occupants. Specifically, it introduces spatial uncertainty that causes wayfinding challenges when occupants need to find a path to reach their destinations [13]. Such challenges get more evident in an emergency, such as fire evacuation. During such emergencies, some of the routes may get blocked and are no longer available for safe evacuation [14].
In such dynamic scenarios, occupants have to respond quickly and use the available wayfinding information instead of relying on the original routes from memory.
Spatial wayfinding researchers have identified, directional changes, choice points, misalignment of reference points, floor plan complexity, and dis- tances as some of the factors in the environment that poses a challenge during wayfinding. Signage and maps are often employed to overcome such challenges in an indoor environment. In some cases, such wayfinding aids improve the wayfinding performance of occupants, but some research has highlighted that a substantial proportion of signage is inefficient and does not provide the wayfinding information it is intended to [5]. It can be due to multiple reasons such as improper placement of signage [15], occlusion, font size, and font colors [16]. This issue is equally relevant when considering yet-to-be-built environments. Architects, designers, and planners must rely on their intuition and expertise when accounting for how people navigate when designing spaces, which becomes prohibitive when accounting for the myriad of contexts that spaces must accommodate.
A poorly designed indoor environment with insufficient wayfinding cues and deficient crowd management [17, 18] may lead to a stressful navigational experience and may cause injuries or even death on a massive scale, respectively. A critical challenge towards managing and designing built environments is to understand (from a cognitive perspective) how humans rely on various information cues when navigating in these spaces.
In conclusion, the increasingly complex structure of current and future building designs incurs multiple wayfinding challenges under both general circulation and emergency. Research investment in solving these wayfinding challenges is crucial to create a stress-free and safe wayfinding experience in an environment [8,19–21].
1.3 r e s e a r c h o b j e c t i v e s
This thesis aims to investigate, learn, and model human wayfinding in a complex indoor environment by mathematical formulation, computer simu- lations, and behavioral experiments. It seeks to understand the psychology behind the interaction and exchange of information between humans and the environment during wayfinding. Specifically, this dissertation seeks to model how occupants rely on wayfinding information sources in their surrounding (e.g., signage, spatial features, the presence and behavior of other people) and information in the head (e.g., the past familiarity of the environment and immediate short-term spatial memory) when navigating in complex indoor environments. The main objective of this thesis is to develop a biologically inspired, cognitively grounded, the computational framework of human wayfinding, which models the uncertainty and fusion of multiple potentially conflicting wayfinding information sources.
In order to understand the underlying cognitive nature of human wayfind- ing, several questions need to be answered:
1. How do people interact with the sign? How does the understanding of this interaction impact the route-choice behavior at an intersection?
2. How do people interact with the spatial layout of a building during navigation? How does the understanding of this interrelation allow us to predict their route-choice behavior at an intersection?
3. How do people build a mental representation of the environment (i.e., cognitive map)? Is the cognitive map hierarchical in nature? Does the cognitive map depend on the sequence in which landmarks are visited? How does memory decay influence the structure of the mental
1.4 ov e r v i e w 5
representation of space? How does the understanding of this impact the modeling of a path-planning algorithm?
4. How can we incorporate the factors mentioned above in a model of path-planning? How do we combine multiple, potentially conflicting, noisy information sources?
5. How do we leverage the understanding of human-environmental factors based interaction to model a computer-aided design tool to aid the architectural design process?
This dissertation aims to expand the scientific understanding of how hu- mans navigate in complex indoor environments from a multi-disciplinary perspective. The proposed research may have a substantial impact on the broader area of cognitive computation, with the potential of disrupting many disciplines and application areas. The proposed research can poten- tially have a transformative impact on our understanding of the cognitive underpinnings of human wayfinding, and enhance practices for architects, urban planners, and civil engineers, enable real-time crowd management, disaster and security applications, as well as aid in the design of smart and connected environments.
1.4 ov e r v i e w
Figure 1.1: Overview of proposed research activities in this dissertation.
In this section, we will give an overview of the proposed research activi- ties in this dissertation. This thesis has four major components, as depicted in Figure9.1. Below we describe each component briefly.
e x p e r i m e n ta l ly-d r i v e n c o g n i t i v e m o d e l i n g o f i n f o r m at i o n s o u r c e s f o r h u m a n way f i n d i n g We will develop cognitively grounded computational models of the influence of individual information sources on human wayfinding. Specifically, we will study (1) signage, (2) spatial features, (3) crowd characteristics, (4) spatial memory, and (5) history of past navigation decisions. We will conduct a variety of experiments using Virtual Reality (VR), and crowd-sourcing to calibrate the models to reflect human wayfinding behavior.
i n f o r m at i o n-t h e o r e t i c f u s i o n o f m u lt i p l e i n f o r m at i o n s o u r c e s u n d e r u n c e r ta i n t y We will develop an information-theoretic ap- proach to fuse information from the aforementioned sources, in order to provide a unified representation of all signals which influence human wayfinding, while capturing the uncertainty, contradictory information, and nonlinear dependencies of each wayfinding information source.
c o g n i t i v e a g e n t m o d e l o f h u m a n way f i n d i n g The information procession and fusion frameworks will be used as the basis of a cognitive agent model for human wayfinding, for simulating human decision-making in complex environments, subject to different signage configurations, spatial features, crowd characteristics, and varying environment familiarity.
e x p e r i m e n ta l e va l uat i o n a n d va l i d at i o n We will perform vir- tual reality and real-world experiments to validate the fidelity of the pro- posed cognitive agent model. Finally, we will highlight the benefits of our framework on case studies of real environments (a transportation hub, a shopping mall, and a museum).
1.5 p r i n c i pa l c o n t r i b u t i o n s
The principal contributions of the work presented in this thesis to the field of computational cognitive wayfinding, multivariate information fusion under uncertainty, computer-aided design tool, and cognitive path-planning are as follows:
1.5 p r i n c i pa l c o n t r i b u t i o n s 7
1. An information-theoretic approach to quantify the wayfinding in- formation from a sign to simulate human wayfinding in an indoor environment using a signage system. Two crowd-sourcing experi- ments were conducted to inform the computation of a sign’s visibility and a human’s decision-making confidence relative to the observer’s location from a sign. The human-signage interaction model was moti- vated by the concept of Visual Catchment Area as proposed in [7–9, 21]. We improved upon their original model by elaborating on the relationship between a sign’s visibility and the relative angle and distance of the observer from the sign. Specifically, we empirically computed two distributions that highlight the continuous relationship between distance/angle and the sign’s visibility.
2. We investigated the impact of spatial geometry on human route choices at an intersection by conducting a behavioral experiment.
Specifically, four statistically significant isovist measures (i.e., area, occlusivity, jaggedness, and skewness) were identified to have a strong interrelation with human route-choice behavior at an intersection. A conditional logit regressor was proposed to predict human route- choice probability at an intersection. Using K-means based clustering, we identified five unique clusters from the wide varieties of real- world intersections. When clustering isovists by their measures, it is necessary to determine which set of measures simultaneously yields the highest within-cluster visual similarity and lowest between-cluster similarity. Three sets of measures were evaluated: a comprehensive set of17isovist measures, a set of five measures that have been evidenced to correlate to human wayfinding behavior based on past research, and a set of six measures that were initially formulated by Benedikt [22].
We demonstrate that using Benedikt’s six isovist measures results in the highest performance, according to the desiderata above. The clustering of real-world intersections and the behavioral experiments show that there is a composite relation between isovist measures, layout geometry, and human route choice behaviors, which is in line with earlier findings in the literature.
3. We developed a spatial-cognition driven layout optimization frame- work to aid architectural design and empower architects with the abil- ity to optimize floor plan layouts by nudging occupants’ route choices.
An efficient parameter space exploration strategy is crucial for any optimization problem, especially for optimizing the geometrical prop- erties of an architectural floor plan. To solve the two main challenges
of fast convergence and reduced parameter search space, we proposed a low-dimensional gradient descent-based optimization framework.
We formulated a geometric-to-human route choice mapping function that is composed of two intermediate mapping functions. First, the mapping function between partial isovist measures and individual route choices is computed with empirical estimates of the effects of partial isovist measures on human route-choice behaviors at an inter- section. Second, the mapping between geometry and isovist measures is employed to compute expected changes in floor plan geometries using a gradient descent approach. Using these two proposed map- ping functions, we formulated the link between geometric parameters and human route choices in order to optimize floor plan designs with respect to designer specified circulation patterns and generate modified layouts.
4. Landmarks play a vital role in human wayfinding by providing the structure for mental spatial representations and indicating locations with which to orient. To this end, we proposed a computational frame- work to identify indoor landmarks that are based on a hierarchical multi-criteria decision model and grounded in theories of spatial cognition and human information processing. Our model of land- mark salience is represented as a hierarchical integration process of low-level features derived from a three-part, higher-level, salience vector (i.e., cognitive, spatial, and subjective salience). We used a fuzzy hierarchical composite-weighted (objective and subjective) Tech- nique for Order Preference by Similarity to Ideal Solution (TOPSIS) to derive the rankings for identified objects at decision points (i.e., intersections). One of the practical implications of this approach is the customization of the landmark identified based on the occupant’s movement pattern. The proposed method can be used to identify the most salient landmarks by averaging the salient landmark observed over multiple circulation patterns of occupants’ inside a complex indoor environment.
5. We proposed a computational model of cognitive path-planning to simulate human wayfinding behavior conditioned on spatial memory.
To model the uncertainty in human memory due to spatial memory decay, we modify the Fine-To-Course (FTC) wayfinding heuristic [23] by distorting the center of the clusters using the category adjust- ment and sequence order effects. We conduct a VR experiment with 40participants to parameterize and validate the proposed cognitive
1.5 p r i n c i pa l c o n t r i b u t i o n s 9
path-planning model. Participants cued recall data were used to iden- tifying the number of nodes at each hierarchical level to parameterize dynamic hierarchical cognitive graph. We observed the impact of the sequence order in which landmarks were visited in both the de- velopment of clusters and participants’ wayfinding trajectories. The proposed path-planning algorithm was successful in generating varied and human-like paths.
6. In this paper, we have proposed an agent wayfinding prediction framework that predicts an agent’s decision at an intersection with M route choices under the influence ofNinformation sources. We propose a weighted temporal combination of information to model an agent’s memory during decision-making implicitly. The simulation results highlight the non-deterministic nature of our framework and produce realistic results according to previous works. We demonstrate that our information-theoretical method can fuse the uncertain and dynamically changing information over time. The proposed work can be used to model the individual-level interactions and decision- making of an agent and can be used to study the evacuation behavior or general circulation of a crowd in an indoor environment.
7. To improve the efficiency and effectiveness of designing signage sys- tems in buildings, we developedAUTOSIGN- a design tool that supports user-in-the-loop and multi-criteria optimization of signage layouts in complex buildings. We formulate signage placement as a multi- objective optimization problem with competing objectives (i.e., total distance traveled, the total number of turns, the centrality of deci- sion points, path overlap, and the number of the decision taken) and constraints (i.e., user-specified sign location and orientation thresh- old), which we solve using a two-step approach. First, an evolutionary method is used to optimize all combinations of navigation paths based on cognitively inspired objective functions weighted by the designers.
Second, a particle swarm optimization is used to optimize individual sign placement to maximize the exposure of wayfinding information (i.e., signage coverage area).AUTOSIGNcan be applied during various design stages of building design (from preliminary design stages to retrofit) to reevaluate the efficiency of an existing signage system which may get occluded due to refurbishment (e.g., an advertisement for retails in an airport terminal or due to special offers boards in a supermarket). In addition to its current application of signage posi- tioning, the tool functionalities can be further used to optimize the
positioning of additional building elements to support wayfinding (e.g., beacons and maps) based on various criteria. Compared to tradi- tional, often manual, and intuition-based approaches, the proposed AUTOSIGNframework provides a complementary computational ap- proach that supports quick and customized signage layout generation informed by a built-in usability evaluation of each generated layout.
8. Finally, an experimental paradigm that combines desktop VR, im- mersive VR, and crowd-sourcing, for conducting human wayfinding studies is proposed and employed for parameterization and investiga- tion of various human-environment interactions.
1.6 s t r u c t u r e o f d i s s e r tat i o n
This dissertation comprises of ten chapters. In Chapter1, we introduce the research problem along with our motivation, research challenges, and desired objectives from this thesis. Chapter2presents the prior works in the field of spatial cognition, path-planning, multivariate information fusion, and computational models of human wayfinding to ground our interdis- ciplinary research problem. In Chapter 3, we present the mathematical foundation of formulating individual wayfinding information sources and the design of behavioral experiments for empirical investigation. Chapters4 to9corresponds to a paper each. Chapter4proposed a human-signage in- teraction model to aid wayfinding using signage in an indoor environment.
In Chapter 5, we investigated the interrelation between the descriptive spatial atom and human route-choice behavior. We employed it to develop a spatial-cognition driven layout optimization framework to aid the architec- tural design process to achieve the desired circulation pattern in a building.
Chapter6, we developed a hierarchical cognitive map to motivate a spatial memory-based path planning to simulate human wayfinding using past familiarity. In Chapter7, we propose our novel information-theoretic fusion approach to combine multiple uncertain information sources to model a unified path-planning algorithm for an agent. In Chapters 8 and 9, we demonstrate the applicability of the proposed research by developing two computer-aided design tools to aid architectural and indoor navigation design processes. Finally, Chapter10summarizes the proposed research and our contributions and discusses potential directions for future works.
Figure1.2shows the relationship between the chapters mentioned above in an overview of this thesis. A description of the mathematical notation used throughout this work is provided in the Appendix.
1.6 s t r u c t u r e o f d i s s e r tat i o n 11
Figure 1.2: An overview of the structure of the dissertation.
1.7 p u b l i c at i o n s
In the context of this thesis, the following peer-reviewed publications have been accepted:
1. Dubey, R. K., Kapadia, M., Thrash, T., Schinazi, V. R. & Hoelscher, C.
Towards an information-theoretic framework for quantifying wayfind- ing information in virtual environments.Cognition and Artificial Intel- ligence for Human-Centered Design Workshop (IJCAI)(2017).
2. Dubey, R. K., Sohn, S. S., Hoelscher, C. & Kapadia, M. Fusion-Based Wayfinding Prediction Model for Multiple Information Sources.22th International Conference on Information Fusion (FUSION),1(2019).
3. Dubey, R. K., Thrash, T., Kapadia, M., Hoelscher, C. & Schinazi, V. R.
Information Theoretic Model to Simulate Agent-Signage Interaction for Wayfinding.Cognitive Computation,1(2019).
4. Dubey, R. K., Sohn, S. S., Thrash, T., Hoelscher, C. & Kapadia, M.
Identifying Indoor Navigation Landmarks Using a Hierarchical Multi- Criteria Decision Framework.Motion, Interaction and Games,15(2019).
5. Dubey, R. K., Sohn, S. S., Hoelscher, C. & Kapadia, M. Cognitive Agent Based Simulation Model For Improving Disaster Response Procedures.Neural Information Processing Systems: Workshop on AI for Humanitarian Assistance and Disaster Response(2019).
6. Dubey, R. K., Khoo, W. P., Morad, M. G., Hölscher, C. & Kapadia, M. AUTOSIGN: A multi-criteria optimization approach to computer aided design of signage layouts in complex buildings.Computers &
Graphics(2020).
The following publications are under revision and in progress: Unpub- lished:
7. Dubey, R. K., Morad, M. G., Sohn, S. S., Xue, D., Thrash, T., Sumner, R. W., Hoelscher, C. & Kapadia, M.Spatial-Cognition Driven Layout Optimization to Nudge Occupants’ Route Choice Behavior in Buildings 2020- (Under revision).
8. Dubey, R. K., Sohn, S. S., Thrash, T., Sumner, R. W., Hoelscher, C. &
Kapadia, M.Cognitive Path Planning with Spatial Memory Distortion 2020- (In progress).
1.7 p u b l i c at i o n s 13
9. Zhao, H., Schwabe, A., Schläfli, F., Thrash, T., Aguilar, L., Dubey, R. K., Karjalainen, J., Hölscher, C., Helbing, D. & Schinazi, V. R.A Decentralized Adaptive Sign System for Fire Evacuation with Human and Agent Validation2020- (Under revision).
The contents of all the above papers are included in this thesis, but the individual notations were harmonized to build upon the core framework described in Chapter3. Furthermore, additional technical details for each of the applications and supporting documents are provided in this the- sis, which should make it possible to implement the methods without consulting external sources.
2
P R I O R W O R K
This chapter lists and describes relevant prior works in the field of human wayfinding, information sources that influence human wayfinding, com- putational models for wayfinding, multivariate decision-making processes, and general formulation of conducting a behavioral study in VR in the context of the research we are going to present in this thesis. Specifically, we discuss the influence of signage, spatial layout, crowd flow, and spa- tial memory (i.e., cognitive map) on human wayfinding behavior in an indoor environment. We then provide a comprehensive account of the existing agent-based wayfinding model to identify the research gaps in incorporating human cognitive behaviors into simulations. We then review the multivariate information fusion model that focuses on modeling the decision-making process under the influence of multiple factors, and lastly, we discuss the advantages and disadvantages of conducting behavioral experiments using virtual reality (VR).
2.1 h u m a n way f i n d i n g
Human wayfinding is the process that occurs when people orient and navigate through an environment. Wayfinding behaviour is a meaningful, directed, and motivated movement from an origin to a destination [24–26].
Such purposeful navigation behavior induces interactions between an occu- pant and the environment. Wayfinding is a natural skill that evolves from a young age and occurs in many different situations, such as driving, walking, or movement through a building [27]. Kevin Lynch [28] was the first to define wayfinding as "a constant use and organization of definite sensory cues from the external environment." According to [27], research in human wayfinding is divided into two categories: performance and competence.
Research on wayfinding performance investigates the empirical behavioral data of context-specific wayfinding tasks (e.g., pairwise distance judgment between two points). The literature on wayfinding competence investigates the cognitive wayfinding models. It involves the use of a computational model to simulate various spatial cognitive processes. Hirtle et al., [29], highlighted the distinction between the computational models of human 15
cognitive processes and computational systems that perform the same task but without employing human cognition. This thesis was motivated to develop a computational model of human wayfinding by grounding it on human cognition, perceptions, and behavior.
2.2 i n f o r m at i o n s o u r c e s f o r h u m a n way f i n d i n g
For successful wayfinding, occupants need wayfinding information cues within their environment (i.e., knowledge in the world) or representations of spatial knowledge about their environment (i.e., knowledge in the head).
Norman introduced the term knowledge in the world as an external in- formation [2]. There are various types of "knowledge in the world" (i.e., external knowledge) [3] that can help occupants find their way, such as signs, maps, landmarks, and fixed geometric aspects of the environment [1, 4–6]. Norman argued that to reduce mental load and for stress-free wayfind- ing, it is vital to have much of the knowledge in the world than storing it as internal knowledge in the head. Moreover, for unfamiliar environments, knowledge in the world is essential, because occupants do not have a previ- ously acquired spatial knowledge of the environment in the head. Human wayfinding is also influenced by a variety of factors that originate from the physiological (e.g., eyesight, height) and psychological (e.g., perception and interpretation) aspects of an individual. Other factors, such as occupants, background, age, gender, level of stress, and grouping behavior, can also potentially influence wayfinding performance. Although it is possible to investigate the factors as mentioned above individually, it is considered unnecessary due to enormous effort. Moreover, these investigations do not reveal about human interaction with the environment. They reveal more about the individual wayfinding differences between individuals [7].
Research has also demonstrated that factors such as age, gender, and back- ground have a minor impact on the wayfinding outcome [8,9].
The focus of this dissertation is to develop a computational model of human wayfinding based on knowledge in the world and knowledge in the head, and the factors, as mentioned above, are excluded and left for future research. Signage plays an essential role in occupants’ wayfinding performance and is a crucial wayfinding cue in the environment. We elect signage, three spatial factors proposed by Weisman [6] ((1) visual access, (2) the degree of architectural differentiation, (3) floor plan configuration), and the influence of crowd as critical wayfinding cues in the world. To model knowledge in the head, we investigate the mental representation of space
2.2 i n f o r m at i o n s o u r c e s f o r h u m a n way f i n d i n g 17
in people’s memory for a familiar environment [10,11]. Below, we discuss the selected four critical factors and relevant work done in their domain.
2.2.1 Signage
An appropriate signage system can facilitate the communication of wayfind- ing information from the world to the individual observer or map [19, 24, 30–32]. Agent circulation and evacuation models have traditionally neglected the agents’ interaction with the signage system [21]. Research done in [33,34] also found that textual signage led to a reduction in wrong turns and an overall increase in wayfinding efficiency compared to graphic signage (i.e., an arrow; see also [35]). Both simulations and user experiments have suggested that the focus of visual attention can be improved with signage redesigns ( [31,36,37]). Filippidis and colleagues [21] presented the first evacuation model (BuildingEXODUS) to include agent-signage interaction using the concept of Visual Catchment Area (VCA). Some re- searchers have proposed different methods for designing signage systems and modeling agent-signage interactions for evacuations and wayfinding scenarios [38,39]. Different models of wayfinding behaviour have assessed agent-signage interaction with various signage parameters [40–42]. Simula- tions of human-signage interaction can facilitate the optimization of sign placement in order to improve wayfinding [9,35,43–45].
2.2.2 Space
Garling [46] identified three factors of the environment, which are crucial for wayfinding: (1) degree of architectural differentiation, (2) the degree of visual access, and (3) the complexity of the spatial layout, which were later corroborated by Weisman [6]. Researchers have performed multiple studies [34,47,48] in which they demonstrated the impact of floor plan complexity on wayfinding performance. [49] demonstrated that people tend to diminish the degree of angle turned and thus navigate in a straight line (follow their nose). [50] suggested that people are attracted towards space with high visual uncertainty in museums. Peponiset al.[51] oberved that people continue navigating in the same direction if there are no significant changes in the environment and when in doubt, go to an integrated space.
The effects of geometric properties of the built environment on occupants’
circulation can be mediated by human wayfinding behavior [52–55]. In an unfamiliar environment, people tend to rely on visual information that is
directly available in their field of view to guide their movement [56]. Several typical properties of the built environment have been proposed to explain human wayfinding, including visual access [56], floor plan complexity and configuration [6], and Space Syntax [57,58]. However, this specific area of spatial cognition research often relies on informal self-report ratings or correlations between building properties and occupants’ movement pat- terns [59]. These methods often fail to extend our understanding of human cognitive processes because they cannot account for external non-spatial factors experimentally. Benedikt proposed a more precise mathematical framework based on isovist measures for capturing local properties of visible spaces from a specific vantage point [22]. This framework may also predict wayfinding behavior based on environmental perception [60]. In- deed, people can encode spatial information of an environment far better using a partial isovist (i.e., part of a full360-degree viewshed) compared to their own movement [53,59,61,62]. In this dissetation, to quantify space and to model the interaction of human with space, we use partial isovist measures to discretize floor plan layouts to precisely quantify space from a human perspective.
2.2.3 Crowd
Sociology and psychology research suggests that people influence each other’s behaviours through the spreading of information and emotions [63, 64]. Evidently, in the process of evacuation, occupants are confronted with conflicting information from different sources which includes crowd mo- tion [65]. Researchers have also demonstrated that occupants under stress during evacuation tend to follow others (i.e., herding effect) [66,67]. Bode et al., [65] found that multiple directional sources influenced occupants’ route choice, and people tend to follow crowd only when they were under con- flicting directional information from sign and the crowd. Hasim et al., [68] examined visitor movement behaviour in a theme park. According to the authors, first-time visitors showed the tendency of following the crowd which was not noticed in the people familiar with the theme park. Hook et al., [69] mentioned that people find their ways through the environment from talking to or following other people’s trails. [70] suggested that in non-emergency situations and during general circulation, the occupant’s who do not have a clear decision on where to go will follow a crowd under the assumption that it is moving in the correct direction. Authors in [71, 72] suggested that a wayfinder may use the presence of crowd as an envi-
2.2 i n f o r m at i o n s o u r c e s f o r h u m a n way f i n d i n g 19
ronmental cue that provides hints about the suitability of available route choices toward the desired destination.
According to Montello [1], occupants’ navigation behaviour in a crowded environment must account for both locomotion and wayfinding. Recently, Li et al., [73] investigated the effect of crowdedness on human wyfind- ing strategies. showed that although crowdness did not affect wayfinding strategies, it did have an influence on occupants’ location (i.e., crowd avoid- ance behaviour was observed by moving close to the boundaries of the environment).
2.2.4 Spatial Memory
The objective of spatial memory is to encode, store, recognize and recall spatial information about the environment [74]. According to [75] human brain subconsciously constructs a mental representation of a route from start to finish. This spatial mental representation is also known as cognitive map [10]. Cognitive map [10] can be defined as a mental representation of the spatial relationships between the crucial points, areas, landmarks, and other salient objects of the environment and how they are connected [76].
Many models of spatial memory have been proposed in the literature. A map-like Euclidean model was proposed in [77], an abstract conceptual model in [78], and models which combines both analogical and symbolic components in [79,80]. Strong evidence for spatial representations contain- ing nested levels of detail and hierarchical organization is provided in [78, 81,82]. During wayfinding, the previously built mental representation al- lows occupants to infer the relative location of a particular destination w.r.t.
its current location to plan the route [76]. Sorrows and Hirtle [83] proposed a theoretical framework of landmark salience that categorized semantic, structural, and visual attributes. Many other outdoor and indoor landmark extractions methods were proposed in [84–86].
Evidence for graph-like representations of space comes from navigation experiments in animals and humans. In [87], authors found that people not only acquire route knowledge but also learned a graph-like representation of the environment in order to perform logical detours to take shortcuts.
For complete understanding of the work done in the field of cognitive map we guide readers towards [53,80,88,89].
2.3 l a n d m a r k s a s c u e s t o b u i l d c o g n i t i v e m a p
Path planning remains a central problem in the field of autonomous agents and multi-agent systems (e.g., robots and crowds) [90]. Previous solu- tions for navigating agents model hierarchical pathfinding [90], agent- environment interaction [91], interactive multi-agent simulations [92], and synthetic vision model-based autonomous agent navigation [93]. Simula- tions that reflect the natural behavior of human navigation are a major challenge, especially with respect to the use of landmarks as cues for struc- turing mental representations of the environment and as reference points for orientation [28, 53, 94,95]. In the following subsections, we review theoretical and computational work conducted in the areas of outdoor and indoor landmark extraction and then compare these prior approaches to the proposed framework.
2.3.1 Outdoor Landmark Extraction
Sorrows and Hirtle [83] proposed a theoretical framework of landmark salience that categorized semantic, structural, and visual attributes. Al- though these attributes can be derived from various data sources, few simulations have combined them effectively. For example, semantic salience (e.g., familiarity) may be represented by linguistic measures and statistics derived from online data [96] or by information theoretic measures based on geographic data [97]. Similarly, structural salience may be computed based on geographic data such as the position of a landmark relative to the path being traveled [98]. While these approaches are suitable for determining the most useful or most popular landmarks, vision-based approaches may hold the most promise for the simulation of unaided, individual navigators.
Vision-based landmark extraction can be used to derive visual and struc- tural attributes (among others) from outdoor environments. For example, Nothegger and colleagues [84] computed an overall salience measure for buildings at intersections as a combination of visual and structural features (e.g., facade color, facade shape) using expert ratings. Similar to Raubal and Winter [85], this overall salience measure represented a weighted-sum of the various attributes. Caduff and Timpf [86] proposed a conceptual frame- work that extended this previous work by reclassifying visual features as representing perceptual, cognitive, or contextual salience and by combining these features hierarchically.
2.4 c o m p u tat i o na l m o d e l o f way f i n d i n g 21
2.3.2 Indoor Landmark Extraction
People tend to be disoriented more often in large indoor environments (e.g., university buildings, shopping malls, and hospitals) than in large outdoor environments [99]. Most previous work in the area of indoor landmark identification focuses on the generation of landmark-based route instruc- tions for indoor guidance systems [100,101]. Because navigation systems often have access to other sources of landmark information (e.g., online documents [96]), the landmarks can be predefined rather than extracted computationally [102]. For example, both [100] and [101] extract and com- bine landmark information in order to generate indoor route instructions but employ very different methods. [100] evaluated vague object features based on the principle of discriminatory power, compared and selected object descriptions using a probabilistic framework, and generated indoor route instructions with the selected object descriptions. In contrast, [101] relied on commonly available data regarding object categories (e.g., recog- nizability and availability in the area of interest) rather than instance-level information such as the semantic, structural, and visual salience of indi- vidual objects. The Indoor Landmark Navigation Model (ILNM) was then based on this category-level information [101].
Motivated by similar theories in spatial cognition and architecture (e.g., space syntax [103]), Lyu and colleagues [102] built a computational model that combines several salience indicators derived from a geographic database using predefined weights. In the thesis, we extend this work by using a vision-based approach to extract salience measures, combining salience mea- sures hierarchically, and optimizing the weights for both low-and high-level salience measures using eye-tracking from a VR experiment.
2.4 c o m p u tat i o na l m o d e l o f way f i n d i n g
The motivation to investigate and better understand occupants wayfinding behavior during general circulation and evacuation has lead researchers to seek a better computational modeling method to study the environmental and behavioral aspects of crowd movement [104,105]. These researchers were motivated to facilitate the safety design in buildings, emergency plan- ning, and response, and predict the outcome of reconstructed disasters to understand the underlying causes in the environment and human wayfind- ing behavior. Many computational models of spatial cognition have been developed to simulate the wayfinding behavior. According to [7] the num-
ber of such models is estimated to be60and many more model has been proposed after2011. Below, we highlight essential models that are relevant to this dissertations.
According to Kuipers et al., [106], the TOUR model is the first proposed computational theory of wayfinding. TOUR model is based on the spatial concepts which were observed by Lynch [28], Piaget and Inhelder [107].
Kuipers’s main focus in the TOUR model is the cognitive map in which spa- tial knowledge is divided into routes, street network, the relative positioning of two locations, dividing boundaries and containing regions. In [108], a subsequent application was proposed, which is based on the TOUR model, and a robot learns, based on a hierarchy of different knowledge types of the robot’s senses, actions, and spatial environment. Many other compu- tational model were proposed such as TRAVELLER [109], SPAM [110], ELMER [111], ARIADNE [112] and NAVIGATOR [113] which combines concepts from both artificial intelligence and cognitive psychology. A bio- logically inspired model of spatial cognition and wayfinding was proposed by O’Neill [114]. Later on, Raubal et al., [115] suggested that it is essential to focus on wayfinding information needed for people trying to navigate an unfamiliar building. Various kinds of models, such as rule-based models, fluid dynamics, discrete choice models, cellular automata, and multi-agent models have been proposed to simulate pedestrian behavior [116]. Most of the recent agent-based simulations for simulating human wayfinding behavior are based on the assumption that the pedestrian knows the built environment perfectly and has the knowledge of the shortest path to reach the destination. It may work for people who are familiar with the building, but for the occupants who are not familiar with the building, a more re- alistic human wayfinding behavior simulation is needed. Koh et al., [117] proposed that sensory attention, memory, and navigation behaviors are the most important factors in a human’s decision making process during wayfinding. Chu et al., [118,119] proposed SAFEgress which incorporates occupants’ perception, spatial cues (exit signs and doors), previous knowl- edge of the environment, the presence of authority, and social cues (crowd flow and group behaviour) to simulate an egress behaviour. Though their work focuses on the simulation of egress behaviour under the influence of multiple environmental cues, it is not clear how directional information from various sources were aggregated. Recently, Keiler et al., proposed a microscopic Unified Pedestrian Routing Model (UPRM) to simulation pedestrians wayfinding behavior in streets and building networks by inte- grating the spatial (e.g., cognitive map) and social (e.g., herding) cognitive
2.5 m u lt i va r i at e d e c i s i o n m a k i n g m o d e l s 23
aspects by building a routing graph based on graph generation method of Kneidl, Borrmann, and Hartmann [120].
To realistically model human’s wayfinding behavior, we must first un- derstand the underlying principle of the human visual attention process.
Recently, multiple research has focused on visual attention and performed empirical studies with gaze direction, body movement, and head mo- tion [121,122]. The MAGELLAN model comprises three modules: a vision module that processes visual information acquired during navigation, a cog- nitive map module that stores spatial information about the environment, and a route generation module that uses the information stored in the cogni- tive map to navigate towards the current target. Authors in [123], proposed a novel approach to model human wayfinding behavior by incorporating visual cognition into an intelligent agent to evaluate a virtual wayfinding system. Our research leverages these strong foundations which study in- formation sources in isolation to develop a cognitively based wayfinding model that accounts for all information in an environment and the crowd.
In summary, multiple computational models to simulate human wayfind- ing behavior have been proposed in the literature for almost four decades.
Some limitations of the work mentioned above are that they model the agent’s decision-making by considering signage, spatial layout, and crowd flow in isolation. These models fail to account for the absence of this isolation in varying degrees and generalize to new information. Bode et al., [65] demonstrated that even when one-directional information cues (e.g., crowd flow and memory) may not affect occupants’ decisions during an evacuation in isolation, they can have an influence when combined with other information sources. In this dissertation, we were motivated to solve this research gap of the absence of a unified cognitive wayfinding model grounded in spatial and human cognition. In this thesis, we investigated critical factors that influences wayfinding in isolation and presented a theo- retical multivariate information fusion model that predicts microscopic and macroscopic route-choice during human wayfinding.
2.5 m u lt i va r i at e d e c i s i o n m a k i n g m o d e l s
Multivariate data fusion based frameworks play a critical role in the model- ing of real-world applications. Real-world applications due to the dynamic nature and environmental impact are laden with imprecision and uncer- tainty. It is still an open challenge as to how to model such uncertainties and imprecision in the data. In the context of human wayfinding, it is possible
to have conflicting information from two sources (e.g., during egress, a sign is pointing to go left), but most of the crowd is going towards the right). To overcome such issue, many approaches have been suggested.
Such approaches can be divided into two groups. The first group proposes to modify the Dempster combination rule, which invalidates widely es- tablished axioms (e.g., rule of association). The second group proposes to modify the body of evidence, which is the preferred approach in this dissertation. Specifically, an information-theoretic approach is proposed in the second group. Below, we describe both the approaches and highlight some of the work done in those approaches.
2.5.1 Dempster-Shafer Theory
d e s c r i p t i o n Dempster-Shafer Theory (DST) is an uncertainty reasoning method, proposed by Dempster [124] and later developed by Shafer [125].
Because of its flexibility and effectiveness in modelling both uncertainty and imprecision with no need for prior information, DST is applied in various fields (e.g., decision making, pattern recognition, risk analysis, and human reliability analysis) for information fusion.
Conjunctive Rule of Combination. The conjunctive rule of combination can be used to combine the belief masses ofNinformation sources [126].
Equation7.1defines the rule for information sourcesaandb. Equation7.2 defines the rule for allNinformation sources.
m(x) = ma ∩ mb(x) =∑y∩z=xma(y)·mb(z) (2.1) m(x) = m1 ∩ m2 ∩ ... ∩ mN(x) (2.2) Dempster’s Rule of Combination.In the conjunctive rule, m(∅)collects belief mass that conflicts between sources and does not relinquish it, mono- tonically increasing as more information sources are combined. Dempster’s rule normalizes belief mass among non-empty sets, which completely coun- teracts this issue but introduces a new issue. Namely, Dempster’s rule has been criticized for resulting in unintuitive beliefs by being unable to convey conflicts between highly contradictory information sources [126].
d e m p s t e r-s h a f e r t h e o r y b a s e d a p p r oa c h Dempster–Shafer ev- idence theory is a one of the popular and most widely used approach to tackle information fusion from multiple sensors. DST has been widely used in the fields such as decision making [127], pattern recognition [128], risk analysis [129], and fault diagnosis [130].
2.5 m u lt i va r i at e d e c i s i o n m a k i n g m o d e l s 25
Shafer et al., [125] was the first one to propose combining the mass functions by using Dempster’s rule of combination wherein they assume that the mass functions were obtained from reliable and non-interacting sources. Almost in all real-world applications, sensors are unreliable and produce noisy mass functions. Ma et al., improved upon their previous work [125] and discounted the unreliable information before converting the mass function as fully reliable [131]. Zadeh et al., [132] highlighted the impact of a high degree of conflict when applying the DS theory. For example, suppose I visit a mechanic to fix my car engine. Car mechanic A diagnoses the engine and predicts with0.99probability that the problem is "blocked engine radiator" or "failure in oil pump" with0.01probability.
Let say, I decide to get another opinion and went to car mechanic B. Car mechanic B diagnosed the engine and precited with0.01probability that the problem is "failure in oil pump" or "lack of coolant" with0.99proba- bility. Solving the same problem with DS rule will produce that the car engine has a "failure in oil pump" with a probability1. Clearly, this is a counter-intuitive result since both the car mechanics considered it highly improbable. Although Dempster-Shafer theory has its advantages, it may produce counter-intuitive results in fusing conflicting pieces of evidence.
Below we discuss how information-theoretic methods are being employed to overcome above mentioned problems.
2.5.2 Information Theory
d e s c r i p t i o n Information theory is a branch of mathematics used to describe how uncertainty can be quantified, manipulated, and repre- sented [133,134]. This uncertainty can be used to characterize the trans- mission of information in various communication systems [135], including those from computer science [136], philosophy [137], physics [138], and cognitive science [139]. Information may be transferred within and between internal and external representations of space [140, 141] and requires a source, channel, and receiver. For example, we define the source as the wayfinding information afforded by a signage system, the channel as the agent’s sensory and perceptual apparatuses used to interpret the informa- tion, and the receiver as the knowledge of a sign’s directional information acquired by an agent. During the process of information flow from the source to the receiver, there is a loss of information that can occur for various reasons. Here, we do not investigate these reasons but instead focus on the quantity of information that is lost. Information theory quantifies