Research Collection
Doctoral Thesis
Über den Verlauf des Drehmomentes bei asynchronen Drehfeldmotoren mit Käfiganker
Author(s):
Andronescu, Plautius Publication Date:
1921
Permanent Link:
https://doi.org/10.3929/ethz-a-000089690
Rights / License:
In Copyright - Non-Commercial Use Permitted
This page was generated automatically upon download from the ETH Zurich Research Collection. For more information please consult the Terms of use.
ETH Library
über den Verlauf des Drehmomentes
bei asynchronen Drehfeldmotoren
mit Käfiganker
Von der
Eidgenössischen Technischen Hochschule in Zürich
zur
Erlangung
derWürde eines Doktors der technischen Wissenschaften
genehmigtePromotionsarbeit
vorgelegt von
Dipl. Elektro-Ingenieur Plautius N. Andronescu
aus Bukarest
No.275 Referent: Herr Prof. Dr. K. Kuh 1man n
Korreferent: Herr Prof. Dr. P.
Debye
DruckvonRobertNoske,
Borna-Leipzig
Großbetrieb für Dissertationsdruck1921.
Leer
-Vide
-Empty
/
Meiner lieben Frau.
Leer
-Vide
-Empty
*
Meinem verehrten Lehrer,
Herrn Prof. Dr. Ing. K. Kuhlmann,
bin ich für das wohlwollende Interesse und für den
gütigen Rat bei dieser Arbeit
zuganz besonderem
Dank verpflichtet.
Leer
-Vide
-Empty
/
Einleitung.
In der
vorliegenden
Arbeit soll die Theorie des Drehmomentesvon
Asynchronmotoren
mitKäfiganker
behandelt werden.Die
nächstliegende Frage
bei derLösung
dieserAufgabe
istfolgende
:Welches ist der
Zusammenhang
zwischenelektromagnetischer Energie
und den Induktivitäten in demFalle,
wo man es im Rotornicht mit reinen Schleifen zu tun hat?
Ist einmal diese
Frage gelöst,
so kann man zu dem Problemdes Drehmomentes
übergehen
und ist dannimstande,
den Einfluß derverschiedenen
Harmonischen des Feldes zu überblicken.Auf Grund der entwickelten Theorie habe ich einen Ersatz¬
rotor
gebildet,
der Schleifen besitzt und in seinerWirkung
mit demKäfiganker gleichwertig
ist.Darausbildete ich die
Induktivitäten,
und mit deren Hilfe wurde der Ausdruck für dieelektromagnetische Energie festgelegt.
Die Formel des Drehmomentes wurde daraus
abgeleitet.
Im weiteren soll der Verlauf des Drehmomentes in
Abhängigkeit
vom
Schlupfe gezeigt
werden. Diese,Frage
ist für die Praxis vongroßer Bedeutung,
denn beim Anlauf einesAsynchronmotors
mitKäfig-
"anker kann es
vorkommen,
daß eineSattelung
des Drehmomentes besteht.Durch
Beispiele
wurdegezeigt,
wie man solcheErscheinungen
verhindern kann.
Überblickt
man dieLiteratur,
die eineBeantwortung
dieserThemata, bis
jetzt
zugeben
versuchthat,
so muß man sagen, daß genaueErklärungen
nichtvorliegen.
Wie aus der Literatur zu ersehen
ist,
wurde derJîafiganker
in Deutschland vonDobrowolski erfunden. Darüber findet man schon im Jahre 1898 inETZ.,
S. 750 u.766, Angaben:
Rößler:
Über Stromverteilung
imdEnergieaufnahme
von Kurz-schlußanker.
An dieser Stelle möchte ich noch
erwähnen,
daß dieBeziehungen
zwischen
elektromagnetischer Energie
und Drehmoment(wohl
eineder
wichtigsten Grundlagen
zurBeurteilung
derMaschinen)
in der Literatur sehr kurz behandelt sind.Dieses Problem bildet für mein Thema die
Hauptaufgabe,
unddank der
Vorlesungen
von Herrn Prof. Dr. K. Kuh 1m a nn konnte ich meineAbhandlung
vollkommen auf die von ihmgegebene
Grund¬lage
aufbauen.Die
Anregung
zu dieser Arbeit wurde mir ebenfalls von Herrn Prof. Kuhlmanngegeben.
Es war zuerst die
Frage
zuuntersuchen,
ob im Falle desKäfig¬
ankers die Anzahl Phasen im Rotor für die
Grundharmonische
des Feldesgleich
mit der Anzahl Stäbe proPolpaar
oder pro Pol sei.Aus der Literatur
ergab sich,
daß die Stäbezahl proPolpaar gleich
der Phasenzahl ist. In dieser Hinsicht war dieMeinung
von Herrn Prof. Kuhlmannanders,
denn er betrachtete diePhasenzahl' gleich
der Stäbezahl proPol, gestützt
auf dieAnsicht,
daß auch imRotor eines
Käflgankers
mit Schleifen zu rechnen sei.Da nun pro Schleife
je
2 Stäbenötig sind, ergibt
sich diePhasen¬zahl
gleich
derStäbezahl
pro Pol. DieAufgabe
warjetzt,
ein klares Bild über solche Schleifen sich zuverschaffen,
welche ich zu lösenversucht habe.
Erster Teil.
Aufstellung der Differentialgleichungen für den Käfiganker.
Bei der
Untersuchung
dieses Problems ist angenommen,daß
derKäfiganker
in seiner Bauartvollständig symmetrisch
ist. Der Statorbesitzt
eine 2p-polige Dreiphasenwicklung.
Dabei ist
vorausgesetzt,
daß die einerSinusfunktion
der Zeit verlaufen.Statorströme
ia, ib, ic
nach Es istJa
=Jb
—Je
=J- Abb. 1 stellt schematisch einenKäfiganker
mit m-Stäben dar.fj fr i* J* ,i'j fi l>
Im tm-i<*? % "S °* ai «* «,.. ^
U U U u is i2 i«
Ime, e. e> e-. es e2 e. Cm C"H
4. 4. +
.4. 4 A 4
$<ma„.,
Irn-i
i» U Cs l* l's 1»
Abb. 1.
U Lm
Durch
Anwendung
desInduktionsgesetzes
in demFalle,
wo dasMagnetfeld
rotiert(Drehfeld),
erhält man durchAuswertung
desLinienintegrals/@da =/([ü 33] da)
über die Schleifen(a^mb^), (ajbjbja.,)...
usw. die in den Stäben induzierten EMKte ei; e2, e3...em.Dabei bedeutet o die
relative Geschwindigkeit
des Stabes gegenŸber dem Feld und
93
die Induktion.Unter
Voraussetzung
derSymmetrie
sind die Widerstände rs aller Stäbea1b1, a.2b2,
...usw. sowie dieWiderstände
rr allerEingstücke
aj ajj,
\ \,
... usw. unter sichgleich groß.
In der
nachfolgenden Kechnung
ist der Streufluß mit berück¬sichtigt.
Es bedeutetls
die Streuindaktivität desStabes, Ar
desKing¬
stückes.
Unter
Benutzung
der Abb. 1 können wirjetzt folgende
Be¬ziehungen festlegen:
I.
Beziehungen
zwischenKing-
und Stabströmen.i/^im'+ii V=imr+i1 + l2
i3'
=im'-K+i2+i8 b) i8»=im»+i1+is+iil
im'=im'+i1+ii! + i3H h im im"=im"4-ii+i2+i3H hi«
Daraus
ergibt
sich:c) ia + i2 + ia
-J1- i,„
= 0.IL
Beziehungen
zwischen EMKten: ex. e2, e3 ... em Stab- undEingströmen.
Asdl('i_is) + rs,ii_i^+^^'W+ vAl'+^"]
=e*_e?^ (i,-is) + rs(i2-i8) + ^(V+V) + r.(V+V)
-e2-e,^^li8—U + rs(i8—i4) + AId t(i„4-V') + rr(i3'+i3")
=e8-e,b)
h j7 (im-
i—im) + i"s(im-i —im)+hd~t (i'm -i+i"m-1) -fc- rr(i'm_ !+i"m-_i)
=em_i—eÀs^Ûm— \) +rs(im—\) +/.rd--(im'-fim") +rr(im'-fim")
=era—e^2^(1/ + i2' + V H hi."') +rrli1' + V + VH him')
=0^r/t (i/'-f- i,"+ i8"+
•••+ im") +
rroy+ i2"+ i3'H {- im")
=0.Die Summe
V + V+V+•+!.»'
bezw.i/' + V' + V'H him"
läßt sich aus den
Gleichungen
I in Funktion der Stabströme schreiben:V + i,' + i,H h im'
=mim' +
m\+ (m—1) i, + (m—2) i3 +
•••-f (m
—(m— l))im
ii"+ V'+ h"-\ h im"
=mim"+
mi, + (m—1) i, + (m—2) i, +
••+ (m—(m—l))im.
Man erhält somit für die
Gleichungen
IIbfolgende
Ausdrücke:4^(mim') + rr(mim')
=—Ar^fmijH 1- (m— (m—l))im]
—rr
[m^-l
k(m— (m—l))im]
Ar^(niim")+rr(mim") =—A,.^ \m\-\ 1- (m—(m—1)) im]
—
r^mi^ (-(m—(m—l))im]
.Daraus läßt sich
erkennen,
daßim'
=im" ist,
und aus denGleichungen
Iergibt
sich weiteria'
==ij^'% i2'
=i.2",
. . . usw.Die
Differentialgleichungen
IIa lassen sich dann schreiben:. d .
/sdt( ii
—h) + rs(ii
—h) + 2;''(ftii' + 2r''V
= ei— e2isdt(i* ~~is) ~^~ Ts{i* ~~is> ^~ 2Ard t*2' ^~ 2rri*'
=e2—e«^dt(im—it) + rs(im
—\) -f- 2ir^im' + 2rrim'
=em—e^Diese
Gleichungen
enthalten neben den Stab-EMKten und Stab¬strömen auch die
Ringströme.
Um die
Beziehung
zwischen den Stab EMKten und Stabströmen allein zuermitteln,
muß man dießingströme
ausobigen Gleichungen
eliminieren.
Wir benützen dazu die
Gleichungen
Ia und IIc. Unter Zuhilfe¬nahme
dieser Gleichungen
kann man dieEingströme
aus IIa elimi¬nieren,
und somitergeben
sich für dieBeziehung
zwischen Stäb- EMKten und Stabströmenfolgende
Ausdrücke:III.
^itÜi- i,) + r,(i,
—y+ 2^-^ + 2^
—/r-r-lm^H
Min—(m—l))im] — im d tl y 'ii m
^d^(i2-i8) + r3(i2-iï) + 2Ard^(i1+i!!) + 2rr(i1 + i2)
~m"rdtlmi]~i l-(m-(m-l))im]-inrr[.--]=e.2-e$
^^(i3 —i4) + rs(i3—i4)'+2Ar^t(i1 + i., + i3) + 2rr(i1+i.2 + i3)
~mArdtlmilH h (m-(m-l))ira]-mrr [••]
=4;n:(im
—i:i) + rs(im —ij+
O+
Osdtv
_
m
Àl'dt'm^ "I ^ (m—(m—1))im]
—mrr[
• •j
==em—e,.Diese
Gleichungen
lassen sich noch etwasumformen,
wenn manvon
je
zweiGleichungen
die Differenz bildet.Man erhält somit als
Endresultat
für die obengenannten
Be¬ziehungen:
IV.
^ä+Gi- 2i-2 + i3) + rs(ii
—2h+h)
—2^t i2
—2rri2
= e1—2e2 +
e3^^2
—2i3+iJ + rs(i2
—2i8 + iJ
—2^^
—2rri3
=e2—2e3-fe4 4^(i3 —2i4+i5) + rs(i3 —2i4+is) —2xr--i4 —2rri4
=e3—2e4 +
ef)isdl (i4-2i5+y + rs(i,-2i.->+i(i)
-2;vrAi5 _2rri5
=e4-2e5 +
esAs^(im_i
—2im + ij) -)-rs(im_i
—2im+y
—2Xr-^im
—2rrim
= em„i—
2era-f
et.Die
Gleichungen
Ic und IVgeben
einSystem
von m-Differental-gleichungen
mit m-Unbekanntenix, i2, i3
. . .im.
Um diese
Differentialgleichungen
lösen zukönnen,
wollen wiruns zuerst an
einige
mathematische Sätze erinnern:"Wennmanzwei
Differentialgleichungen
von kterOrdnung
in i hat:dki dk~xi di
ak^ + ak_1^_T +
....+ a1(ft + a0i
=Awobei ak, ak_i,
bk, bk_i,
. . .Konstante, A,
Bhingegen
Funk¬tionen der Zeit
sind,
erhält man durch Elimination von:dki dk-xi
. . l
dtk' dtk"!
eine
Differentialgleichung
von kteiOrdnung
in A und B:dkA .
dk-xA
. . dA . . ,akdtk ^ K_1
dt*-1
^ ' 1 dt.dkB,Ä dk-!ß XJB
*de + /,k dtFï +
" -+ ßi1I + ßo*
=0-wobei ak, ak_i, . . . .,
ßk. ßt-i
.... Konstante sind.In unserem Falle haben wir
m-Differentialgleichungen
:., „
/di1 di„ dim
. . .\
...11
'(dt' dt"---"ÎT'
'"•••••-)
=«•.('»
.
/d^ di2 dim
. . . \Durch
Elimination
vonij
und-rf
aus 1 und2,
1 und3,
1 und 4. . .. 1 und m erhält man
(m—1)-Gleichungen
2.Ordnung
ini2, i3,
h ....
im.
Durch Elimination von
i2
und -~ aus den neugebildeten
Glei¬chungen
erhält man(m—2)-Gleichungen
3.Ordnung
ini3, i4, i5
...im
und endlich durchElimination von
im_i
und —-ira-i
erhält man einedt
Differentialgleichung
von mterOrdnung
vonim
_
dmim dm-xim dm-2im dim
+am-i ..„^ +am-2 ,tm_2
H hai-^r-
+
a0im=<p(t),
m dtm ' ""-'dt"-1
'
m-*dtm-2
' ' xdt
wobei am, am-i, • • • • a0 konstante Größen sind.
Analog ergibt
sich fürjeden
der Ströme:ii; 1,
....je
eineDifferentialgleichung
von mterOrdnung.
Wenn e1, e2, e3 . . ..em Sinusfunktionen der Zeit
sind,
dann istq>
(t)
eineSinusfunktion, und somit sind \,i2, i3
... .im
imBeharrungs¬
zusstande auch Sinusfunktionen.
Es sei angenommen:
et =
E,/,
sin cote2 =
E<p
sin(cot
—ß)
e3 =E<psin(t»t— 2ß)
em=
E</>
sin(cot— (m—l)ß),
wobei
ß
— p•--m
i,, i.2, i:,
.. . .im
werden von der Form sein:ix
= Jsin(co
t—(p) i3
= Jsin(co
t—c/'—ß) i8
—Jsin(cot
—cp—2ß) im
= Jsin(cot
—cp—(m—\)ß)
Gesucht werden J und q.
Aus den
Gleichungen
IV kann man die Unbekannten J und cp bestimmen. Wir hatten:Asdl(il
—2i2 + y + rsk—2i.2+i8)
—2Ardti*
~~2Tt^
=ei ~ 2 e2+
esFür e1—2e„
-f- e;J
hat man:e±—
2e2-)-e8
=E</>(sincot—
2 sin(cot
—ß) -\-
sin(cot
—2ß))
=
E*(2cos/?sin(cot
—ß)
—2sin(cot
—ß))
—
E</,
sin(co
t—ß) (cos ß
—1)
=—
4EfJ5sinä^ sin(cot
—ß).
Li
Analog
erhält mau für \—21,-j-i3:
\ —
2i2 --(- ig
= —4Jsin'2(j sinfcot
—co—ß).
Setzen wir diese Werte der
Spannungen
und Ströme inobige
Diffe¬rentialgleichung ein,
so erhalten wir:—
4coj;tgsin2£
cosfcot—cp—ß)
—4Jrssin'2 £
sin(cot—
cp—ß)
—2co
J?.r
cos(cot
—cp—ß)
—2Jrrsin(cot
—cp—ß)
=— 4
E<£
sin2'1-
sin(cot
—ß)
Jco(2Assin2^--j-^r (cos (cot—q>—/?)-{- J|2rssin'2 ~-|-rr 1
sin(cot—cp— ß)
„=2 E$sin'2~sin
(<»
t—/J)
.Aus dieser
Gleichung ergibt
sich J undtgc«,
wenn man z. B.cot—
ß
=q und cot—ß
= 0 macht.Für mt—
ß
=<p hat man:E^.2sin2^sinç5
T Li
24sin-g -f-
/, |cofür cot —
£
=0co
(2/ssin2 -)- Ar jcosc/
=(2rçsin'2^ -f~
rrJ sin90.
Daraus
ergibt
sich:col2;.ssin^ +
/tg^
=- —2rssin2' -f-
rrco2(2/,sin^ + Â
• 1
tg <P \ 2
sm2(p= ö ^ — x
1
+ tgV /2rssin2 ^ +
rrY + w^^sin» | + Ar
Durch Elimination von sincp aus der Formel von J
ergibt
sich:J=
E*.2sins§
|/(2r,sin8^
-t-r,)2 + ws(2Â3sins| + A,
Was hier an dem einen
Beispiel
ausführlich entwickeltwurde,
ist nun in demFall,
wo elf e.2 .... em ganzallgemeine periodische
Funktionen der Zeit
sind,
ähnlichdurchzuführen,
indemmane,, e2 em in eine Fourriersche Reihezerlegt.
Für die weitere
Behandlung
derAufgabe
scheint zunächst eineSchwierigkeit
darin zuliegen,
daß wir es im Rotor mit keinemSchleifensystem
zu tunhaben.
Um die
Umsetzung
von elektrischerEnergie
in mechanische be¬urteilen zu
können,
müssenwirdenAusdruckfür dieelektromagnetische Energie aufstellen.
Dafür hat man
folgenden allgemeinen Ansatz,
der sich aus den Stator- und Kotorströmen sowie den Selbst- undGegenseitigen-In-
duktivitäten aufbaut:
1 k=m 5.=n
ü= 9ü
2 2 iki;.L/.k-
k=l /.=1
t
Zweiter Teil.
Bestimmung der Induktivitäten.
Es ist zuerst nicht
leicht,
sich von dem Vorhandensein derRotorinduktivitäten
eine klareVorstellung
zu verschaffen.Am einfachsten läßt sich die
Aufgabe lösen,
wenn man denKäfiganker
durch einSchleifensystem ersetzt,
welchesinseinerWirkung
dem
Käfiganker
vollkommen identisch ist.Abb.2.
Die
Wirkungsweise
diesesErsatzspulensystems geht
aus der schematischen Abb.2 klar hervor.Es sei die Anzahl der Stäbe m= 6.
Alsdann hat man 6
Spulengruppen
zu bilden:Andronescu. 2
Spulengruppç
1 besitzt 2
Schleifen,
in welchen die Strömeit
u.im' fließen,
Li „ O ,. ,. „ „ „ lj, lg U. lm „
3 4 i i
6
DasGesetz vom
magnetischen
Kreis§!q
do fürirgendeinen Weg
z. B.
(a)
Abb. 2 ist identisch mit dermagnetischen Wirkung
des Stromesi5
allein.Ebenso das Gesetz der
elektromagnetischen
Induktion/@do=/([o©]da)
behält seine
Gültigkeit.
Auf diese Weise können wir die Selbst- und
gegenseitigen
In¬duktivitäten des Rotors bestimmen.
Wir
zerlegen
die Induktivitäten in 4 Teile:1. Die Selbst- und
gegenseitigen
Induktivitäten des Stators alleinL^k,
wobei A=a,
b,
c k=a,b,
c.2. Die
gegenseitigen Induktivitäten,
die sich aufgegenseitige Wirkung
von Stator und Rotor beziehenM;k,
wobei l=a,
b,
c k=1 : m.3. Die Selbst- und
gegenseitigen
Induktivitäten des Rotors allein(Die Streuungsinduktivitäten
ersterOrdnung
nichtinbegriffen.)
wobei A= 1 : m k=l-^m.
Auf S. 15
ergab
sich aus derBeziehung
zwischen Strom J undSpannung E,p
als effektiver Widerstand und effektiveStreuungs¬
induktivität:
und
2sm2|
2sin3|
Wir können somit für die Rotorstreuinduktivität den Ausdruck
2
sin21
einsetzen.Für die
Bestimmung
derInduktivitäten ist angenommen, daß im ganzen Raum desSpulensystems,
diePermeabilität u dieselbe ist undsomit das Feld mit der
MMK (magnetische
UmlaufSpannung)
pro¬portional
wird.Das Feld nimmt
infolgedessen rechteckige
Form an.Unter dieserAnnahme sollzunächst untersucht
werden,
wiesich die Induktivitäten von zweiSpulen
vonbeliebigen
Breitenverhalten,
erstens in
bezug
auf dierechteckigen Felder,
zweitens inbezug
aufdie Harmonischen des Feldes.
Man denke sich im Stator und im Kotor
je
eineSpule
mit g±bezw.
e'x Windungen. (Abb. 3.)
Es sei i=i'= 1
Amp.
b;
SUIorumtôn
M-
b:
b RotorumMrig
Abb. 3.
Wir haben dann eine
magnetische Umlaufspannung (in Gauss-cm)
im Stator MMK=4.T
-^
gtim Rotor MMK =v?r Q\- in
10
In
bezug
auf denAnkerumfang
teilt sich die MMK für denStator in
4:71 b
für den Rotor in
471 a ,
ïëfc2nnd
47t ,a'
10 -1à '
wobei AB = a
ÄJB'
= a'BC ==b
WU=b'
AC
=A'C
=AUmfang des Ankers
bezw.Stators. Für
einFlußrohr
2*
von
Querschnitt
1 und magn.Permeabilität
n= 1 undLänge
=d er¬gibt
sich ein magn. Widerstand (5cm/cm'2.
Die Induktion B wird
am
Statorumfang
ttcQ'~ä t—&i
am
Rotorumfang tö-Si'
-j t=Bi'
ioei2"a~~
B»"Wir können somit schreiben
für
das
Statorfeld B=ît (a0)
für das Rotorfeld B'=
tj (a0)
a0=
Bogen,
welcher für a0=A=2n wird«oi=^-a
und «oi=^"a (2n
—«oi)=-Xb-
Die
Zerlegung
derrechteckigen
Kurven in ihre Harmonischen läßt sich mittels der Fourierschen Reihen durchführen.Nach Fourier hat man
B =
B0 -f ^ (Bsh„
sinh0
a0-f Bch„
cosh0 a0),
h„=l
wobei
BSb0
undBei><)
dieAmplituden
der Sinus- bezw. Kosinuslinien derho*611
Harmonischen des Feldes bedeuten.Dabei ist
h0
einegerade
oderungerade
•Zahl.Bn
=^ J B2da0— J Bid«,,
B,
sh„B,
ch«1_
71
1
71
2n
sin
h0
a0 d a0j B2
sinh0a0äa0—j Bt
0 «Ol
«oi 2:rr
,
I
B2 cosh0a0da0—
lBx
cosho^da,,
In unseremFall
ergeben
sich fürB0, BSh„
undBcho folgende
Werte:B»
=^[B4Si + BiKi-2«)]=-^[B,(o„l-a«i)]-0
ßsh„
Beb,,
1
Jl
1
71
1
7rh0
1
TT
j-1 (1
—cosh0 «01)
—r~(cos h0
a01 — cosh0
2«)
"0 "0
(B, + BJ ^
-(B2 + BJ A- h0
coshu
«01ÏOQïô {1
cosh0 a01) (B2 + Bx)
r- sinh0
uä"o
1 4tt 1 . ,
Wir können somit für B
folgenden
Ausdruck schreiben:B=
Bsi
sin a0-(- Bei
cos a0-\- BS2
sin2a„4- B02
cos 2 «0-(-
4 . . . .-)-... + Bsh„
sinh0
a0-f Bcho
cosh0
a0 -4- . . .wobei das
allgemeine
Glied diesertrigonometrischen
EeiheBSb0
sinh0a0 + BCb„
cosh,,
a0 inunseremFalle sich infolgender
Weise schreiben läßt:1 \ji 1
Bsb(1
sinh0a0 -f Bcb„
cosh0
a0=-^ -^Ql
-[sin hc
u0-4- sinh„ (a0l
—«„)]
Aus dieser
Gleichung
ersieht mansofort,
daß für a01 =0 oder k•2Ji(k
eine ganzeZahl)
keine Harmonischeexistiert,
und für ani = n1 4tt 1
ergibt
sich — -p- qx~[sin h0a0
—sinh0a0
cosh0;i],
wobei fürh0
=gerade Zahl,
der Ausdruck nullwird,
und fürh0
=li=ungerade
Zahlhat man —=- ^ro,~ sin
h„
an ein bekannterAusdruck,
der sich er-7ia 10 'o u
gibt,
wenn man dieSpulenbreite gleich
n annimmt.Analog erhält
man für diehftte
Harmonische des Rotorfeldes 1 4n 1B's
hosinh0
a0-f B'c
,,0cosh0
aa= —-^ o,'- ^sin h0
a0-J-sinh0 (a'01
—«„)].
Jetzt soll bewiesen
werden,
daß dieGleichung M1X'
=M^
fürdie
rechteckigen
Feldersowie auch fürdieentsprechenden
Harmonischen des Feldesgilt.
Für die
rechteckigen
Felderergibt sich,
wenn manMu'
=M1'l bildet,
BBa'e1'
=(Bt'a'-B1'(a-a'))e1.
Setzt man die Werte von
B2, B2', B/
in dieGleichung ein,
dann erhält man4» b 1* , ,
4ji,b'l,
4sr,a'
1 ,ïo^i^^-ïo01 Jda
ffl~ÏO~01 Jä(a
~a)Ö14tt b 1 , , 4ji
,1
, 4ot,a'
1iö-ei7äaffi
-ïô*i ä
a ft -ïoe* 2
* ai?1 4tt b 1 , , 4ti,1
, / a\ 4ti,1
, bwas zu beweisen war.
Wenn man
Mj°,
=MJ1,01
setzt(wobei MjJ,
diegegenseitige
In¬duktivität der
h0ten
Harmonischen des Feldesbedeutet),
so erhältman
analog
, «Ol' A p '
— I
(Bsho sinh0a0-f Bcho cosh0a„) dag/
«oi
*
—
/ (B'sho
sinh0
a0+ B'cbo
cosh0
a0) da0
6l.0
Das linksstehende Glied dieser
Gleichung
kann man infolgender
Art schreiben:
2?l(
«Ol
/
—~^Ql -(sin h0a0 +
sinh() (a01
—a0)) d«0 q,'
0 "o
==
2^ ^i" Jo"
ftQi'jI1
—cOsho «oi' +
cos üo(«oi
—«oi)
—cosK«oi]
=
Mh°
Das Glied rechts wird A f«i 1 in , 1
2 Ö
^1 ~T^?i'l(sin h«ao +
sinfloKi'
—«o) ) d«o
ft ~-
^~ä jq^ ft' ftj[
!—COSh0 a01.-f
COSh„ (a01'
—a01,)
—C0sh0
a„=Mb°
mi'i
Daraus ersieht man, daß die
obige
Annahmeberechtigt
ist.Nachdem wir
gesehen haben,
wie sich dieInduktivitäten
vonzwei
Spulen
vonbeliebigen Breiten verhalten,
wollen wirjetzt
die Stator-Induktivitäten bestimmen:L;k
für l=a,b,
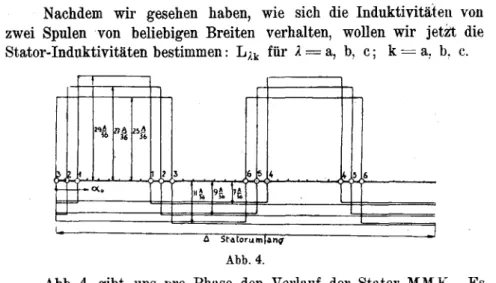
c; k=a. b. c.w
H
0-9-9- 0-0-0" *-"9"Y"S>
û Sratorumfan?
Abb.4.
Abb. 4
gibt
uns pro Phase den Verlauf der Stator-MMK. Es seiangenommen
2 p =4,
q = 3(Anzahl
Nuten proPol
undPhase).
Wir haben somit im Stator 36 Nuten. Die
Leiterzahl
pro Nut in Serie sei qvDie
MMK, erzeugt
vom Stromia
in derSpule
1—1,
ist A =in .
iö
la Ql"Mit Rücksicht auf den Verlauf dieser MMK am
Umfange
wirdA in zwei Teile
geteilt
SV UDdâ29-
Analog
werden wir die MMK der zweitenSpule (2
—2)
und der drittenSpule (3
—3)
ebenfalls teilen inà9
undà27
All
undA25.
Die
Superposition
von allen drei MMKtengibt
eine resultierende'MMK,
deren Verlauf inbezug
auf denUmfang symmetrisch
ist.Abb. 5
zeigt
den Verlauf dieser res. MMK.Bezüglich
dessymmetrischen
Verlaufes dieser res. MMK. kannman sie entstanden denken durch
folgende Verbindungen
derSpulen¬
seiten
(3
—1), (2
—2)
und(1
—3), wobei
die MMK einersolchenSpule
in Funktion des
Ankerumfanges gleich
•=- sein muß.Man denke sich ein
bewegliches Spulensystem (1, 2, 3)
genau wie daserzeugende (im
Felde des ersterenbeweglich), wobei,
wie wirVerlauf des
ae<re.mei(iqen
IndaKtivilchKoeU als \w*XU*w 'map*
Abb. 5.
Abb.6.
wissen,
es'gleichgültig ist,
wie dieVerbindungen
derSpulenseiten
ausgeführt werden;
dannerhält
man für einebeliebige Lage
deszweiten Spulensystems
den Verlauf dergegenseitigen Induktivität
zwischen dem ersten und zweitenSpulensystem gemäß
Abb. 5.Der Verlauf der
gegenseitigen
Induktivität wurde in der Artfestgelegt,
daß man fürjede Spule (1
—1), (2
—2), (3
—3)
die Summe derQuadrate
des karriertenPapiers gebildet hat,
welche Summe als Maß für denFluß,
der durch dieSpule hindurchgeht,
zu betrachten ist.Für die weitere
Behandlung
des Problems ist eszweckmäßiger,
das Feld in seine Harmonischen zu
zerlegen
und die Induktivitäten inbezug
auf die betreffende Harmonische des Feldes zu bestimmen.Es sei für
ia
= 1Ampère
IÏ^
= B-(Abb-6)
Wir
zerlegen
B in seine Harmonischen6=
6!
sin a!-f B8
sin 3 a'-+- B5
sin 5 a!-\-
. . .-f Bh
sin ha'+
. . .B=
Bx
sin(a'
—y) -f B3
sin 3(a'
—y) +
...+ Bh
sin h(a'
—y) -f
. . .8=
6!
sin(a'
—2y)-f B3sin3(a'
—2y)-L...+Bhsinh(a'
—2y)+
...B^Bi
sin(a' —(q —1) y) + B8
sin 3(«'
—(q
—1) /)+...
-f Bhsinh(a' —(q —l)y) +
...Dabei bedeutet h eine
ungerade
Zahl.Die hteHarmonische des resultierenden
Wechselfeldes
füria
=1
Amp.
sei93ah
SBah=Bh[sinha'-i-sinh(a'—y) + siQh(a'—2y)+...4-sinh(a'—(q—l\y)l
sin h
Bh-
-. ~sinyh(a'-(q —1)£)
sm h ~
tiYl '
2 f 4
wobei
Bh
= - I B sin h a' d a' = B jiff0
Es sei a=a'—
(q
—1)
7 . Dann erhält mansin h
S3
ah=Bh
—sin h « . sin h „In der
gleichen
Weiseergeben
sich füria
=ib
=ic
= 1A die hten Harmonischen der res. Felder der Hten und IIIten Phase zu. sin h ö / a ,
S3bh=—r-B
sin h a—Q sin h '
. sin h -s
4 . 2
Soh
=-t:B —sin hTth . , y
sm h '
(-«•£)
a' bezw. a sind elektrische
Winkel,
denn sie beziehen sich auf den^ten Teil des
Umfanges.
Der räumliche
Winkel
ist an=—.P
Mit Hilfe dieser Harmonischen der Felder kann man
jetzt
die InduktivitätenLh
,iA
,
Lh
bestimmen. Die Ankerlänge sei = 1•aa' ab" ac °
u^
. sm hV
Th r 4 2
-L'a. = Qi ^ü B
sm h ^
JT-(l-l)|-+2
.t-(h-I)-!
*-<q-i)-|
+ r/
sin hada-\- i
sin hada-ta-«',
(q-i)-|
+7-T+(q-l)-5-
-j-
i sin hada-| |-
I sin hada-(1-1)
1+23'
(q-1)l
Man hat
—
(q —1)
=d-q)
2.(q —l)£+y
=(3-q)£
_-(q_l)| + 2y
=(5-q)|
(q—1)
Y((2q-l)-q)|
Wir können somit schreiben:
sin h ^r-
•
t 4 „ 2
,-B-
sin h
^
yq
:i4-(l_q) -T t-((2q-l)-q)-l
l sin ha
da-| j-
I sin had«<i-<i>i ((2q—l)-q)
1'V. sin h _
,
t 4
._, 2 . lui
^ 7i\v jih . , y 2
sin h jj-
Li
sinh(^+(l-q)|)
T 4
Tl
sm h Se
+ sinh(2+(3-q)|) + sinh(j + (5-q)|) + ...+ sinh(|+((2q-l)-q)^
in h
(J + #)+••
.+ smh(j + #+(q-l)y)
2 „ . hjr
, -
—2 sin-^r-
jrn Jill . , y Z
sm h =
Li
yq
. sin h
t 4 2 . hTi
=q± --,—rB 2 sin
sin h 2 .
7i\i jrh
sin h s 2 •
i y
sin h
^
sin h Wir erhalten somit:
Laa
=Öl ZS« T Bsin h j'q
sin h
^
2 » . , 71 . - 71 sin h sin h
Li Li
In
gleicher
Art werdenLab
undLae
ermittelt:yq^
b ; sin h
o .
L"vab=0-,tl —rr„ t B
st* h
^-^
tBsin h
sin h ^ sin h
Li
sin h
sin h
7Q_
smh2Smhl2+2
3/
sin h wobei et -jT-j t B
sin h
2 i . .T sin h _
}' / 2
L"
ist.m
Wir können somit für eine
Spule k,
die genau wie die Stator¬spule gebaut ist,
diegegenseitige
Induktivität für die hte Harmonische desFeldes
infolgender
Art schreiben:L:k
=^^(h(« + ^ + ,k-a,h^j
=
Lhmsin(h(« + ^-^) + «k_a)h^)
(h(a+2-2¥)+^h¥)- 'ck=^m Sln| n(«
+^
Dabei
hat man a—a=0,
b—a—1,
c•—a=2.Bekanntlich ergibt
sich durchZusammenwirken
von allen drei Phasenströmen des StatorseinDrehfeld und auf Grund dieses Drehfeldes kann man eine Drehinduktivitätbestimmen,
welche dieBeziehung
zwischen
Drehfluß
und Phasenstrom darstellt.Die Wechselfelder von allen drei Phasen des Stators a,
b,
classen sich in
folgender
Art durch zweigegenläufige
Drehfelder vonhalber
Amplitude
ausdrücken:Das
Wechselfeld
von Phase a sin hS3(ah) Ja
sin »i t= t BJ sin hJLI
72
cos(ajjt—ha)
cos(w1t -f- ha)
das
Wechselfeld
von Phase b •/
2n\
i23(bh) Jb
sin^o),
tçrj
—^
B Jsin h 2 1
sin h 7 2 COS CO
2n
J 2n\\
,ït___h(a___)j
COS
j
ö>± t;+ >(-£))
das
Wechselfeld
von Phase c33(oh) Jb
sin(a^t
—2--jH= -^
B Jsin h
^
2 1 sin h 7 2
cos
|ö>it_2.^-h(a-2-^)j_cos(«>1t-2.^+h(«-2.^))
Das Drehfeld entsteht durch
Superposition
von allen drei Wechsel¬feldern.
Die Summe aller Cosinus-Ausdrucke wird
cos
(û^t—ha) + cosl (Ott—ha -(--^ (h—1) ]+ cos( a^t—ha -j-
2~(h
—1) j
—
cos^t-f- ha)— cos( ft^t-j-
ha—^(h+l)l—cosla^t-j-
ha—2--«-(M" 1))
r=
(— lp
+1 3 cos(cott + (— l)n
ha),
wobei n eine
gerade
oderungerade
Zahl sein kann.Es istzu
beachten,
daßfür h= 3(2
n—1),
wobein=1, 2,
3•• ao, das resultierende Drehfeld93jh
nullwird,
wobei h stetsungerade vorausgesetzt ist;
nur für h= 1
-\-
3(n
—1),
wobei n=1, 3,
5-•• oo(ungerade Zahl)
oder h—5
-f-
3(n
—2),
wobei n=2, 4,
6-•• oo(gerade Zahl) gibt
es ein Drehfeld.Weil h solchen
Bedingungen
unterworfenist,
ersetzen wir hdurch v,
wobei v=1
+
3(n
—1)
für n=1, 3, 5,
7••• oov=5
+
3(n —2)
für n=2, 4, 6,
8-•• ooh stellt somit nur eine
beliebige ungerade
Zahldar,
vdagegen
mußdie
obigen Gleichungen
erfüllen. -Das resultierende Drehfeld kann somit in
folgender
Art ge¬schrieben werden:
4
smVlT3
/ \»4y==(_l)n-i_ BJ ^cos ß, t
+ (— l)n
v« .7iV y £ \ I
smv g
Dieses Drehfeld der v-fachen
Polpaarzahl
rotiert mit einerWinkelgeschwindigkeit
—- und an der Stelle apulsiert
es mit derKreisfrequenz wl-\-(
—l)n
—(v
a).Zur
Bestimmung
der DrehinduktivitätIA
bilden wir zuerst die resultierendeFlußverkettung !Pjk
für eineSpulengruppe
der Phasek,
welche der vten Harmonischen des Statordrehfeldesentspricht
^=iaL;k + ibL;k + ici4.
Hierin kann k= a, b oder c
sein, wobei ia
=Ja
sinœ,1, ib
=Jb
sin (o\ t s-ic
=Jc
sinIw11
— 2•-~-l
Ja
=Jb==Je ==«•Bei
der'gewählten Lage
desKoordinatenanfanges
ista=konst=0.Setzen wir daher die Werte von S. 28 von
L*k, L^k
undL^t
in die
obige Gleichung ein,
so erhält man:!Pjk
=(-l)»
+iJL; \
cos(œtt + (-1)" (v| + (k-a) Y~fj.
Der Ausdruck
/
sin v -s-\
«TV3
„8/ 21. v* 3 TVLm 2 --= *B
^vm —r 'sm^"?1
" = '\sin
vT
stellt die Drehinduktivität dar.
Da
jetzt
die Induktivitäten des Stators bekarintsind,
können wir zurErmittlung
der EMkten im Stator schreiten.Die induzierte EMK in einer
Spule
k des Statorskann entweder aus der Formel;.=a
oder aus der Formel @=
[v 33]
bestimmt werden.Aus der ersten Formel
ergibt
sich:pv sk
-
*— dt
~
-1)»+»
JVA
co,sin^
t+ (-l)n (v| + (k-a)
v^)|
Wir kommen zum
gleichen Resultat,
wenn wir die induzierteEMK aus der Formel
@
=[o 33]
ableiten.Indiesem Falle wird für
g1-Stäbe
an der Stelle a die induzierte EMKe^a
infolgender
Artausgedrückt:
e„a=
vB/ivQ1,
wobei v dierelative
Geschwindigkeit
bedeutet. DieAnkerlänge
ist = 1.Für v hat man den Ausdruck:
, , -, d
\
1 Ttrco.114- —l)a-T7va —r, —=t.
'dt