Vorlesung zu Analytische Mechanik
Fachbereich Physik an der Universität Konstanz gelesen von Prof. Dr. Matthias Fuchs
bearbeitet von Maximilian Thaller
Stand: 1. November 2010
Dieses Skript ist eine Mitschrift der Vorlesung Analytische Mechanik an der Universität Konstanz (Wintersemester 2010/2011).
1 Vorbemerkungen
• Grundlegend ist die Newton’sche Bewegungsgleichung (cf. IK I) fürNMassepunkte („Teilchen“) mit Massenmi, miti= 1, ..., N. Die Beschleunigungen der Teilchen folgen aus den Kräften i
mi~r¨i=F~iext+ X
j=1,j6=i
F~i,jint. (1)
Hierbei ist~r¨i die Beschleunigung des i-ten Teilchens,mi~r¨i ist die Änderungsrate des Impulses, F~iext ist die äußere Kraft (z.B. Schwerefeld), die auf das Teilcheni wirkt und F~i,jint ist die vom Teilchenj auf das Teilcheni ausgeübte interne Kraft, z.B. hervorgerufen durch Ladungen.
Es ist schon bekannt, dass diesef = 3Ninhomogenen, gekoppelten, nicht linearen, gewöhnlichen Differentialgleichungen zweiter Ordnung zusammen mit 2f Anfangsbedingungen die Bahnen (Bewegungen) der Teilchen festlegen. Hierbei bezeichnet f die Zahl der Freiheitsgrade, welche der Anzahl der Gleichungen entspricht.
• Die Formulierung der Mechanik nach Lagrange, Hmilton, etc. (genannt „analytische Mechanik“) leisten das selbe und sind häufig leichter lösbar (y„technische Mechanik“).
• Prinzipien der Variationsrechnung liegen der analytischen Mechanik zu Grunde (cf. „Fermat’sches Prinzip der geometrischen Optik“), wurden in der analytischen Mechanik entwickelt und wurden in alle Bereiche der Physik übertragen.
• Die Quantenmechanik und die allgemeiner Relativitätstheorie sind Verallgemeinerungen von Konzepten aus der analytischen Mechanik. Die Verknüpfung von Symmetrie und Erhaltungs- größen ist ein wichtiges Konzept.
2 Grundzüge der Variationsrechnung
2.1 Motivation und klassische Beispiele
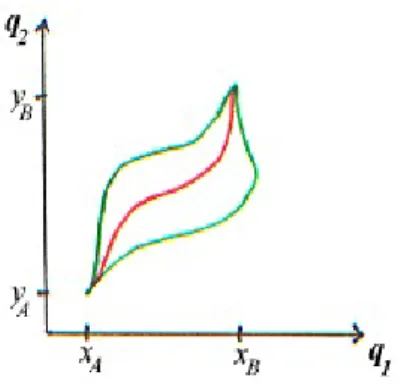
Es seien zwei PunkteAundB mit Ortsvektoren(xA, yA)und(xB, yB)in derx-y-Ebene gegeben. Es ist nun interessant, was die kürzeste Bahn oder Kurve ist, welche die beiden Punkte verbindet. Hierfür muss erst der Begriff „Kurve“ geklärt werden.
Definition: Bahn
Eine Bahn ist eine AbbildungC :I→Rf mitI= [tA, tB], die durchf stetige und stetig differenzier- bare Funktionen qi(t)mit i= 1, ..., f gegeben ist (Abkürzung:~q(t)∈Rf). Später wird t oft die Zeit sein.
Beispiel:
Es seien also alle Funktionenx(t)undy(t), sowiex(t)˙ undy(t)˙ stetig fürtA≤t≤tB mitx(tA) =xA, x(tB) =xB,y(tA) =yA,y(tB) =yB durch die Randpunkte. Die Länge der Bahn C ist
l(C) = Z B
A
ds (2)
Abbildung 1:Zwei Punkte samt verschiedener verbindender Bahnen.
mit ds als Inkrement der Bogenlänge s. Nun muss noch die Bogenlänge s in Abhängigkeit von t bestimmt werden. Hierfür betrachten wir den Tangentenvektorq(t) = ( ˙˙ x(t),y(t))˙ T an die BahnC im Punkt ~q(t)(cf. Abb. 2). Damit folgt für die Länge∆sder Bogenlänge
Abbildung 2:Tangentenvektor~q˙an die BahnC.
∆s=|~q(t+ ∆t)−~q(t)|. (3)
Dies wird nun Taylor-entwickelt in∆t. Man erhält
∆s=|~q(t)˙ ·∆t+O(∆t2)|=|~q(t)| ·˙ ∆t. (4) Wenn ∆tinfinitesimal klein wird, folgt ds=|~q(t)|dt. Damit haben wir˙
l(C) = Z tB
tA
dt q
( ˙~q(t))2. (5)
In der x-y-Ebene gilt daher
l(C) = Z tB
tA
dtp
˙
x2(t) + ˙y2(t). (6)
Dir Bahn kann nun folgendermaßen umparametrisiert werden. Es wird an dieser Stelle darauf ver- zichtet zu diskutieren, wann dies genau möglich ist. Sei x(t) umkehrbar zut(x)mit t(xA) =tA und t(xB) =tB, sowie dt= dt
dxdx=dx
˙
x undy˙= d
dty(x(t)) = dy(x)
dx x˙ =y0(x) ˙x. Damit haben wir l(C) =
Z xB xA
d
˙ x
px˙2+y02x˙2= Z xB
xA
dxp
1 + (y0(x))2 (7)
fürx >˙ 0. Schließlich interessiert die Frage, welche Funktiony(x)die Längelminimiert. Man beachte hierbei, dass l[y] eine Abbildung ist, die den Funktionen y(x)eine reelle Zahl (die Länge) zuordnet.
Man nennt lein Funktional vony(x).
In einer allgemeineren Herangehensweise betrachten wir das Bahnfunktional S. Es handelt sich hierbei um eine Abbildung aller BahnkurvenC in die reellen Zahlen, gegeben durch das Integral über die DichtefunktionL:Rf×Rf ×R→Rentlang der jeweiligen Bahnkurve C, also
S[~q(t)] = Z tB
tA
dtL(~q(t),~q(t), t).˙ (8)
Wenn die Bahnkurve C : t 7→~q(t)gegeben ist, dann ist L= L(t) bekannt undS ergibt sich durch Integration. In der Variationsrechnung wird die Bahn C, also ~q(t) so bestimmt, dassS minimal ist.
(Eigentlich wird nur durch Nullsetzen der Ableitung eine Extremstelle von S bestimmt. Ob es sich um ein Minimum handelt, kann man aber in aller Regel durch einfache Überlegungen herausfinden.) Die Abhängigkeit vontB−tAinteressiert hierbei nicht.
2.2 Die Euler’sche Gleichung
Es sein ein BahnintegralS[q(t)]durch S[q(t)] =
Z tB
tA
dtL(q(t),q(t), t)˙ (9)
für die eindimensionale Bahn q/t), die durch qA bei t =tA und qB beit =tB geht, gegeben. Das heißt C = {(q, t) : q = q(t), q& ˙qstetig für tA ≤ t ≤ tB, q(TA) = qA, q(TB) = qB} und sei L stetig differenzierbar. Nun geht es darum, welche Bahn q(t) = q0(t)S minimiert. (Hierbei bezeichnet q0(t) die extremale Bahn.) Wir vergleichen die Bahnenq(t) =q0(t) +εh(t), wobeih(tA) =h(tB) = 0gelten muss,damit alle Bahnen q(t) durch die Endpunkte gehen. Ansonsten ist h(t) eine (in einer kleinen ε-Umgebung beliebige) Funktion. Die Frage ist nun, welchesq0(t)bei der Taylor-Entwicklung vonS in ε,
S[q0(t) +εh(t)] =S0+εS0+O(ε2), (10) (wobeiS0=S[q0]) für beliebigesh(t)aufS0= 0 führt.
Bemerkung:
• Dieses Problem lässt sich lösen, indem man das Extremum der FunktionS(ε)ermittelt.
• Ob es sich bei dem Extremum dann um ein Minimum oder ein Maximum handelt ist für die Betrachtungen in der Analytischen Mechanik im allgemeinen unwichtig.
Wir setzen (9) in (10) ein und haben S[q0(t) +εh(t)] =
Z tB
tA
dtL(q0(t) +εh(t),q˙0(t) +sh(r), t).˙ Nun führen wir die Taylorentwicklung inεdurch und erhalten
S(q0(t) +εh(t)] = Z tB
tA
dtL(q0(t),q˙0(t), t) + Z tB
tA
dt ∂L
∂q q=q0
˙ q= ˙q0
h(t) +∂L
∂q˙ q=q0
˙ q= ˙q0
H˙(t)
!
ε+O(ε2).
Nun wird partiell integriert, um nur Terme, die proportional zuhsind zu erhalten und zusammenzu- fassen:
... = S[q0] +ε
Z tB
tA
∂L
∂q − d dt
∂L
∂q˙
| {z }
=∗
q=q0
˙ q= ˙q0
h(t)dt+ ∂L
∂q˙h q=q0
˙ q= ˙q0
tB
tA
| {z }
wegenh(tA,B) = 0fallen diese Randterme weg
+O(ε2)
Damit der in εlineare Term für alle beliebigenh(t)verschwindet, muss also∗= 0entlang der Bahn (also für alletA≤t≤tB) gelten, also
∂L
∂q q=q0
˙ q= ˙q0
− d dt
∂L
∂q˙ q=q0
˙ q= ˙q0
= 0. (11)
Damit haben wir die Euler’sche Gleichung hergeleitet.
Beispiel: Kürzeste BahnC in der Ebene Die Länge list gegeben durch
l(C) = Z xB
xA
dxL(y(x),dy
dx =y0, x).
Dies entspricht dem allgemeinen Terml(C) =RtB
tA dtL(q(t),q(t), t)˙ mitL(y, y0, x) =L(y0) =p
1 + (y0)2. Übertragen auf die Euler’sche Gleichung (11) erhält man
∂L
∂y = 0 = d dx
∂L
∂y0 = d dx
y0 p1 + (y0)2
⇒ y0
p1 + (y0)2 = konst.=:c1
⇔ (y0)2 = c21(1 + (y0)2)
⇔ (y0)2 = c21
1−c21 =:c2=konst.
⇒ y(x) = ax+b,
also eine Gerade. Setzt man die Randpunkte ein, so ergibt sich y(x) =yA+ (yB−yA) x−xA
xB−xA
.
Die kürzeste Verbindung zwischen zwei Punkten in einer Ebene ist also die Gerade.
Wir wollen diese Betrachtung nun auf Bahnen imRf verallgemeinern.
Satz:
Die BahnkurveC imRf gegeben durch{(~q, t) :~q=~q(t), d.h.1i=qi(t)füri= 1, ..., f mitf stetigen und stetig differenzierbaren Funktionenqi(t)fürtA≤t≤tB}ist Extremalkurve des Bahnfunktionals
S= Z tB
tA
dtL(~q(t),~q(t), t)˙ (12)
mit Lagrange-Dichte L:Rf ×Rf×Runter Vorgabe bestimmter Randpunkte~q(tA,B) =~qA,B (man sagt dann auch S[q]ist stationär) genau dann, wenn die Euler’sche Gleichungen (11) erfüllt sind
∂L
∂qi − d dt
∂L
∂q˙i = 0 füri= 1, ..., f (13)
Beweis:
Dief Vergleichsfntkionen ~q(t, ε)erfüllen
~
q(t, ε= 0) = ~q(t) (extremale Bahn)
~
q(t, ε) = ~q(t) +∂~q
∂ε ε=0
ε+O(ε2) (kleine Variation)
~
q(t=tA,b, ε) = ~q(tA,B) =~qA,B (alle Bahnen gehen durch die Randpunkte)
Man führt nun für die einzelnen Komponentenidie selbe Rechnung wie vorher durch, nur mit Indizes.
Zunächst setzten wir
∆S :=S[~q(t, ε)]−S[~q(t)].
Nun führen wir von∆S die Taylor-Entwicklung in εdurch und erhalten
∆S=ε Z tB
tA
f
X
i=1
∂L
∂qi ε=0
∂qi(t,0)
∂ε + ∂L
∂q˙i
∂q˙i(t, ε= 0)
∂ε
!
dt+O(ε2).
Wegen ∂q˙i∂ε(t,ε) = ∂ε∂ ∂t∂qi(t, ε) =∂t∂ ∂qi∂ε(t,ε)(man darf ja die Ableitungen vertauschen), kann man partiell integrieren und hat also
∆S ε
−→ε→0
Z tB
tA
f
X
i=1
∂L
∂qi
− d dt
∂L
∂q˙i
| {z }
∗∗
∂qi(t, ε)
∂ε ε=0
dt+
f
X
i=1
∂
∂ε
qA,B
z }| { qi(t, ε)∂L
∂qi
| {z }
=0, weil alle Bahnen durch die Randpunkte gehen
tB
tA
.
Da ∂q∂εi
ε=0beliebigef Funktionen fürtA≤t≤tB sind, muss∗∗= 0für jedesi= 1, ..., f alleine und jede ZeittA≤t≤tB gefordert werden.
Bemerkung
• In der Mechanik ist zumeistL die Differenz zwischen kinetischer und potentieller Energie.
• Die Euler’schen Gleichungen sindf gekoppelte, implizite, gewöhnliche Differentialgleichungen zweiter Ordnung:
d dt
∂L
∂q˙i
=
f
X
i=1
∂2L
∂qj∂q˙i
˙
qj+ ∂2l
∂q˙j∂q˙i
¨ qj
+ ∂2L
∂t∂q˙i
= ∂L
∂qi
Hierbei variiertLmit der Zeit, daLvon den mit der Zeit variierenden Orten abhängt.
Beispiel: Kürzeste Bahn in der Ebene (von Oben) Es giltf = 2,~q=
x(t) y(t)
,l(C) =RtB
tA =p
·x2+·y2dt, also lautetL
x(t) y(t)
=~q(t), x(t)˙
˙ y(t)
= ˙~q, t
hierL
x(t) y(t)
=p
˙
x2+ ˙y2=L( ˙x,y). Dies setzen wir in die Euler’sche Gleichung (11) ein:˙
d dt
∂L
∂x˙ = d dt
˙ x
px˙2+ ˙y2 =∂L
∂x = 0
⇒ x˙
px˙2+ ˙y2 = konst.=:c1; d
dt
∂L
∂y˙ = d dt
˙ y
px˙2+ ˙y2 =∂L
∂y = 0
⇒ ∂y˙p
˙
x2+ ˙y2 = konst.=:c2; dy
dx = y˙
˙ x =c2
c1
=konst.
⇒ y = a+bx (Gerade)
Abbildungsverzeichnis
1 Zwei Punkte samt verschiedener verbindender Bahnen. . . 2 2 Tangentenvektor~q˙an die BahnC. . . 2