Universit¨ at Regensburg Mathematik
A multiphase Cahn-Hilliard-Darcy model for tumour growth with necrosis
Harald Garcke, Kei Fong Lam, Robert N¨ urnberg and Emanuel Sitka
Preprint Nr. 04/2017
A multiphase Cahn–Hilliard–Darcy model for tumour growth with necrosis
Harald Garcke ∗ Kei Fong Lam ∗ Robert N¨ urnberg † Emanuel Sitka ‡
Abstract
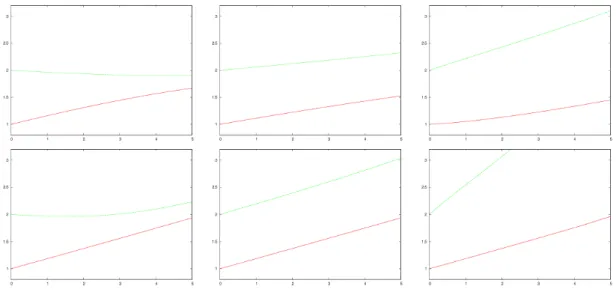
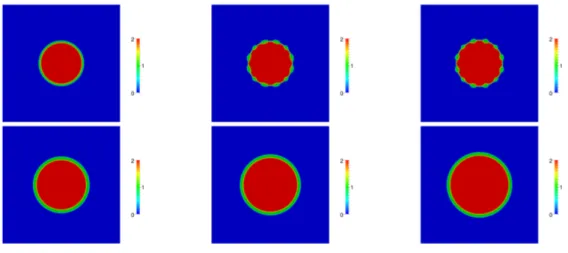
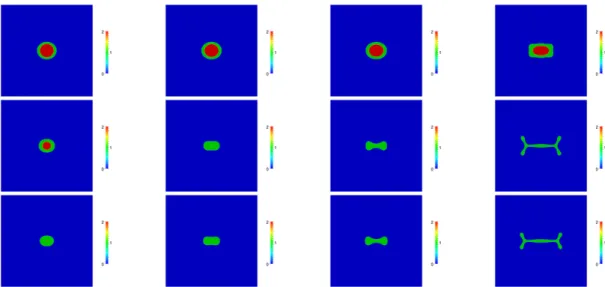
We derive a Cahn–Hilliard–Darcy model to describe multiphase tumour growth taking interactions with multiple chemical species into account as well as the simul- taneous occurrence of proliferating, quiescent and necrotic regions. Via a coupling of the Cahn–Hilliard–Darcy equations to a system of reaction-diffusion equations a multi- tude of phenomena such as nutrient diffusion and consumption, angiogenesis, hypoxia, blood vessel growth, and inhibition by toxic agents, which are released for example by the necrotic cells, can be included. A new feature of the modelling approach is that a volume-averaged velocity is used, which dramatically simplifies the resulting equations. With the help of formally matched asymptotic analysis we develop new sharp interface models. Finite element numerical computations are performed and in particular the effects of necrosis on tumour growth is investigated numerically.
Key words. multiphase tumour growth, phase field model, Darcy flow, necrosis, cellular adhesion, matched asymptotic expansions, finite element computations
AMS subject classification. 92B05, 35K57, 35R35, 65M60
1 Introduction
The morphological evolution of cancer cells, driven by chemical and biological mechanisms, is still poorly understood even in the simplest case of avascular tumour growth. It is well-known that in the avascular stage, initially homogeneous tumour cells will eventually develop heterogeneity in their growth behaviour. For example, quiescent cells appear when the tumour reaches a diffusion-limited size, where levels of nutrients, such as oxygen, are too low to support cell proliferation, and necrotic cells develop when the nutrient density drops further. It is expected that angiogenic factors are secreted by the quiescent tumour cells to induce the development of a capillary network towards the tumour and deliver much required nutrients for proliferation [51]. But it has also been observed (experimentally [46]
and in numerical simulations [10, 12]), that the tumour exhibits morphological instabilities, driven by a combination of chemotactic gradients and inhomogeneous proliferation, which allows the interior tumour cells to access nutrients by increasing the surface area of the tumour interface.
∗
Fakult¨ at f¨ ur Mathematik, Universit¨ at Regensburg, 93040 Regensburg, Germany ({Harald.Garcke, Kei-Fong.Lam}@mathematik.uni-regensburg.de).
†
Department of Mathematics, Imperial College London, London, SW7 2AZ, UK (robert.nurnberg@imperial.ac.uk).
‡