Writing a GUI for the Fischer gripper robot
Stand Back! Due to unreliable hardware we recommend not to use the Fischer robot this year, unless you really really want it and cannot continue living without it. If so, contact Stefan first.
1 Task
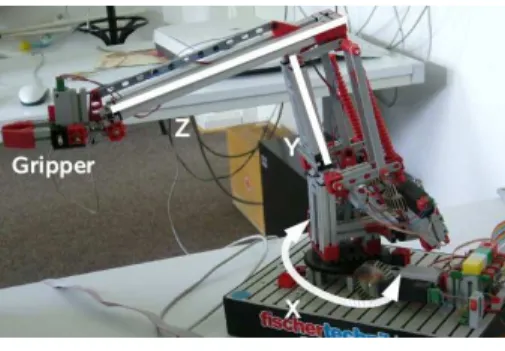
Write a GUI to control the axes and gripper of the robot (Fig. 1). Add functions to move the robot into pre-programmed positions. Furthermore, show the state of the robot to provide the user with feedback. Keep usability in mind!
Figure 1: The Fischer gripper robot.
DownloadFischer.zip from the GUI homepage1. Open a console, change to the download directory and extract the archive withunzip Fischer.zip.
You should find these files: FisherInterface.handFisherInterface.cpp, RS232Interface.h andRS232Interface.cpp,test.cpp.
Now read the instructions given inFisherInterface.h to get started. It’s the only file you have to deal with later on (though the others have to be present). To get a feeling for it, you might want to take a look attest.cpp.
2 Need help? Criticism? Want the robots?
Ask Stefan (Room 1212, phone 7282). Keep in mind: We need your feed- back to know what we can do better next year.
Have fun, Ralf & Stefan
1http://www-md.e-technik.uni-rostock.de/ma/rs/lv/lvgui.html
1