Goethe-Universit¨at Frankfurt am Main Institut f¨ur Angewandte Physik
Masterarbeit
Untersuchung der FRANZ CH-Struktur
Nils Petry 28. Februar 2017
1. Gutachter: Prof. Dr. Holger Podlech
2. Gutachter: Dr. Marco Busch
Inhaltsverzeichnis
1. Einleitung 3
2. Theoretischer Hintergrund 6
2.1. Grundlagen Elektrodynamik . . . 6
2.2. Kavit¨aten . . . 8
2.2.1. IH-Struktur . . . 9
2.2.2. CH-Struktur . . . 9
2.2.3. RFQ-Struktur . . . 9
2.2.4. Frequenztuning . . . 10
2.2.5. Kenngr¨oßen f¨ur Kavit¨aten . . . 13
2.2.6. Thermische Effekte . . . 15
2.3. HF-Ein- und Auskopplung . . . 16
2.4. Strahldynamik . . . 19
3. Messungen 24 3.1. Thermisches Frequenztuning . . . 25
3.1.1. Aufbau . . . 25
3.1.2. Messdaten & Auswertung . . . 26
3.2. Aufbau & Kontrollsystem der Konditionierung . . . 30
3.3. Konditionierung . . . 33
4. Vergleich mit der Simulation 57
5. Fazit 59
Literaturverzeichnis 61
Abbildungsverzeichnis 63
A. Danksagung 65
B. Erg¨anzende Abbildungen 66
C. Erkl¨arung 73
1. Einleitung
Teilchenbeschleuniger sind seit 90 Jahren ein wichtiger Bestandteil wenn es um neue Erkenntnisse auf dem Gebiet der Physik geht. Man unterscheidet bei Teilchenbeschleu- nigern zwischen Ringbeschleunigern und Linearbeschleunigern. Auch FRANZ (
”FRAnk- furter Neutronenquelle am Stern-Gerlach-Zentrum“) benutzt einen Linearbeschleuniger um nach Inbetriebnahme Experimente mit Neutronen zu erm¨oglichen.[9] Das FRANZ- Projekt, konzipiert und errichtet vom IAP (
”Institut f¨ur AngewandtePhysik“), besteht im Allgemeinen aus f¨unf Abschnitten.[13]
Abbildung 1.1.: Schematischer ¨Uberblick ¨uber den Aufbau des FRANZ-Projektes.[23]
Beschriftung ist in Englisch.
Den ersten Abschnitt stellt die Ionenquelle dar. Die Bogenentladungs-Volumen-Ionenquel- le wird einen continuous-wave1 Ionenstrom von 50 mA mit einer Teilchenenergie von 120 keV bereitstellen.[24] Nach der Ionenquelle durchl¨auft der Strahl den LEBT-Abschnitt (”Low-Energy Beam Transport“). Dieser besteht aus vier Solenoid-Magneten2, einem Chopper-System und mehreren Strahldiagnostika. Die ersten beiden Magnete dienen da- bei zur Anpassung des Strahls in Form von transversaler Fokussierung an das Chopper- System, w¨ahrend die letzten beiden die Anpassung f¨ur den n¨achsten Abschnitt ¨uberneh- men. Das Chopper-System teilt den Strahl mit einer Frequenz von 250 kHz in Makro- Pulse im Bereich von 100 ns.[23]
Anschließend folgt der Linearbeschleuniger-Abschnitt, welcher einen 4-rod RFQ3 und
1Abgek¨urzt
”cw“, alternativ auch als
”Dauerstrich“ zu bezeichnen.
2In Abbildung 1.1 zu sehen als ein blaues, mit einem X markierten Rechteck.
3Eine Erkl¨arung des Begriffs ist auf Seite 9 zu finden.
eine IH-DTL-Kavit¨at4 enth¨alt. Diese beiden Strukturen sind ¨uber einen Steerer gekop- pelt und beschleunigen den Ionenstrahl von 120 keV auf 2 MeV.[3] Der RFQ sorgt des Weiteren f¨ur eine Zerlegung der Makro-Pulse in neun Mikro-Pulse von 1 ns L¨ange. Im Anschluss sorgt der MEBT-Abschnitt (
”Medium-Energy Beam Transport“) f¨ur eine transversale Fokussierung und erm¨oglicht durch die CH-DTL-Kavit¨at4 eine zus¨atzli- che ¨Anderung der Ionenstrahlenergie von ±0,2 MeV. Der letzte Abschnitt bezieht sich auf den Bunch Kompressor und die Target-Sektion.[12] Zusammengesetzt aus einem 2,5 MHz Kicker, zwei Rebuncher-Kavit¨aten und vier Dipol-Magneten komprimiert der Bunch Kompressor die neun Mikro-Pulse auf einen 1 ns Puls.[1]
Abbildung 1.2.: Konzept des FRANZ Bunch Kompressors.[5] Beschriftung ist in Englisch.
Der komprimierte Puls besitzt einen Peak-Strom von 9 A und kann somit, auf einem Lithium-Target deponiert, einen Neutronenfluss von ausreichender St¨arke produzieren, welcher daf¨ur genutzt werden kann, um z.B. die Nukleosynthese im s-Prozess5in Sternen weiter zu erforschen. Neben dem beschriebenen Kompressor-Modus ist f¨ur FRANZ ein Aktivierungs-Modus angedacht. In diesem werden weder der Chopper noch der Bunch Kompressor benutzt. Dies f¨uhrt zu einem cw-Ionenstrahl von einer Stromst¨arke von bis zu 3 mA.
Im Rahmen dieser Masterarbeit soll die CH-Kavit¨at von FRANZ konditioniert und in Betrieb genommen werden. Diese Kavit¨at dient als Rebuncher und erm¨oglicht es, die
4Eine Erkl¨arung des Begriffs ist auf Seite 9 zu finden.
5Einer von drei Prozessen, ¨uber welchen die Entstehung von schweren Elementen erkl¨art wird.
Teilchenenergie um ±0.2 MeV zu variieren. Alternativ kann die Kavit¨at dazu genutzt werden die Strahlemittanz in Strahlrichtung nahezu konstant zu halten.
Die CH-Struktur dient als Vorlage f¨ur den Injektor des MYRHHA-Projekts6, welcher nach dem aktuellen Design mit Hilfe von CH-Strukturen den Strahl nach dem RFQ auf die ben¨otigte Teilchenenergie beschleunigt.
6Weiterf¨uhrende Informationen sind auf http://myrrha.sckcen.be/en/MYRRHA zu finden.
2. Theoretischer Hintergrund
2.1. Grundlagen Elektrodynamik
Ausgehend von den Maxwell-Gleichungen, welche in ihrer hier aufgef¨uhrten Form nur im Vakuum gelten, k¨onnen einige Grundvoraussetzungen f¨ur Teilchenbeschleuniger her- geleitet werden.
∇ ·~ E~ = ρ
0 (2.1)
∇ ·~ B~ = 0 (2.2)
∇ ×~ E~ =−∂ ~B
∂t (2.3)
∇ ×~ B~ =µ0J~+ 1 c2
∂ ~E
∂t (2.4)
Die Wirkung der elektrischen und magnetischen Feldern auf geladene Teilchen l¨asst sich
¨uber die Lorentzkraft beschreiben.
F~L=q
E~ +~v×B~
(2.5) Dadurch lassen sich zwei Aussagen f¨ur geladene Teilchen treffen. Zum einen wirkt die Kraft eines Magnetfeldes senkrecht zur Geschwindigkeit eines Teilchens. Dies f¨uhrt zu einer kreisf¨ormigen Ablenkung des Teilchens bei gleichbleibendem Betrag der Geschwin- digkeit. Somit k¨onnen Magnetfelder nur zum Ablenken und transversalen Fokussieren eines geladenen Teilchenstrahls genutzt werden. Elektrische Felder zum anderen k¨onnen aus allen Richtungen wirken. Folglich k¨onnen elektrische Kr¨afte parallel zur Geschwin- digkeit wirken und das Teilchen beschleunigen oder einen Teilchenstrahl longitudinal fokussieren.
Um sich im Folgenden mit Koaxialleitern oder Hohlraumresonatoren auseinandersetzen zu k¨onnen ben¨otigt man eine Beschreibung f¨ur elektromagnetische Wellen. Aus den For- meln 2.1 bis 2.4 kann eine Wellengleichung f¨ur das elektrische Feld hergeleitet werden, welche analog auch f¨ur magnetische Felder gewonnen werden kann.
4E~ − 1 c2
∂2E~
∂t2 = 0 (2.6)
Es gibt eine Vielfalt an Arten von Wellen, welche alle eine L¨osung der Wellenglei- chung sind. F¨ur Teilchenbeschleuniger ist unter anderem die TE-Welle (
”Transversal- Elektrisch“) und die TM-Welle (
”Transversal-Magnetisch“), beides stehende Wellen, von
Bedeutung. Es ist m¨oglich bei beiden Wellenarten verschiedene Moden anzuregen. Im Folgenden wird die TM-Welle und ihre Moden in Zylinderkoordinaten n¨aher betrachtet, wobei analog ¨ahnliche Aussagen zu der TE-Welle gemacht werden k¨onnen. Benannt wer- den die Moden nach der Vorlage TMmnp1.m beschreibt die Anzahl der Nulldurchg¨ange der Mode in Azimutalrichtung,ndie Anzahl der Nulldurchg¨ange in Radialrichtung und p die Anzahl an Halbwellen in z-Richtung. F¨ur einen zylindrischen Hohlraumresona- tor, auch Kavit¨at genannt, lassen sich mit den entsprechenden Randbedingungen die Gleichungen f¨ur alle sechs Feldkomponenten aufstellen.
Ez =E0Jm
xmn
r R
cos (mθ) cos pπz
l
exp (iωt) (2.7)
Er =−pπ l
R xmn
E0Jm0 xmnr
R
cos (mθ) sinpπz l
exp (iωt) (2.8) Eθ =−pπ
l mR2 x2mnrE0Jm
xmn
r R
sin (mθ) sin pπz
l
exp (iωt) (2.9)
Bz = 0 (2.10)
Br =−iω mR2
x2mnrc2E0Jm xmnr
R
sin (mθ) cospπz l
exp (iωt) (2.11) Bθ =−iω R
xmnc2E0Jm0
xmn
r R
cos (mθ) cos pπz
l
exp (iωt) (2.12) Jm ist die Besselfunktion m-ter Ordnung und Jm0 deren Ableitung. xmn ist die n-te Nullstelle der Besselfunktion. Weiterhin steht R f¨ur den Radius der Kavit¨at und l f¨ur deren L¨ange.[21] Des Weiteren gilt:
k= 2πf
c (2.13)
k2= xmn
R 2
+ pπ
l 2
(2.14) Resultierend ergibt sich f¨ur die Resonanzfrequenz fR einer TM-Mode[6]:
fR =c· r
xmn
2πR 2
+1 4
p l
2
(2.15) Bei einer TE-Mode wird f¨ur die Resonanzfrequenz anstatt xmn die n-te Nullstelle der Ableitung der Besselfunktion x0mn benutzt. In einer zylindrischen Hohlraumkavit¨at ist die Grundmode2 die TM010-Mode, beispielhaft in Abbildung 2.1 dargestellt. In diesem Fall lassen sich Gleichung 2.7 bis 2.12 reduzieren zu3:
Ez=E0J0
2,405r R
cos (ωt) (2.16)
Bθ=−E0 c J1
2,405r R
sin (ωt) (2.17)
1m, n, p∈N.
2Von den Indizesm,nundpdie energetisch niedrigste stabile Mode, in der sich eine stehende Welle bilden kann.
3Die restlichen vier Gleichungen ergeben 0.
Abbildung 2.1.: TM010-Mode des elektrischen Feldes (links) und des magnetischen Feldes (rechts), jeweils ein Schnitt in longitudinale und transversale Richtung.
Simuliert wurde die Feldverteilung mit CST Microwave Studio 2015. Rot bedeutet maximale Felddichte w¨ahrend blau die minimale Felddichte beschreibt.
2.2. Kavit¨ aten
Obwohl mit einer leeren zylindrischen Kavit¨at nach Formel 2.15 in der TM010-Mode Re- sonanzfrequenzen von 30 MHz bis 450 MHz erreicht werden k¨onnen, werden sie in ihrer einfachen, normalleitenden Form heutzutage nur in Form eines Alvarez-Teilchenbeschleu- nigers benutzt. Dies liegt unter anderem an ihrer geringen Impedanz, welche im Verlauf dieses Abschnittes erkl¨art wird. Um diese Unzul¨anglichkeit zu umgehen, werden Struk- turen benutzt, welche nicht mit einer TM-Mode betrieben werden, sondern mit einer TE-Mode, auch H-Mode genannt. Im Unterschied zur Formel 2.7 und 2.10 gilt bei einer H-Mode:
Ez= 0 (2.18)
Bz=B0Jm xmnr
R
cos (mθ) sinpπz l
exp (iωt) (2.19)
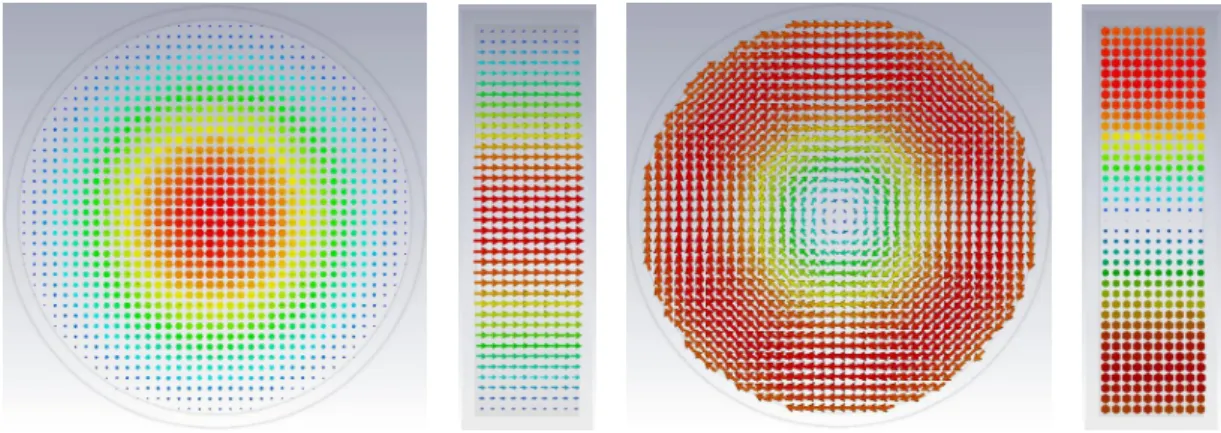
Betreibt man also einen Hohlzylinder in einer H-Mode so befindet sich auf der z-Achse, welche bei zylinderf¨ormigen Kavit¨aten als Strahlachse definiert wird, kein elektrisches Feld. Nichtsdestotrotz l¨asst sich durch das Einbringen von zus¨atzlichen Geometrien das elektrische Feld auf die Strahlachse fokussieren und somit auch ein Ionenstrahl beschleu- nigen4, beispielhaft dargestellt in Abbildung 2.2. Wie man einen Ionenstrahl in einem Resonator effektiv beschleunigen kann wird in Kapitel 2.4 n¨aher erl¨autert. Eine ¨Ubersicht von H-Moden-Strukturen liefert Abbildung 2.4.
4Solche Strukturen werden als DTL-Struktur (
”DriftTubeLinac“) bezeichnet.
2.2.1. IH-Struktur
Vorgeschlagen in den 50er Jahren ist die IH-Struktur (
”Interdigitale H-Mode“) mitt- lerweile eine Standardstruktur zur Beschleunigung von Ionenstrahlen. Angeregt in der H111-Mode kann sie geladene Teilchen auf Geschwindigkeiten vonβ≤0,3 beschleunigen.
Der Aufbau ist schematisch in Abbildung 2.2 dargestellt.[10]
Abbildung 2.2.: Skizze einer IH-Struktur. In dieser Momentaufnahme ist die elektrische Ladung und das resultierende elektrische Feld abgebildet.[6]
2.2.2. CH-Struktur Die CH-Struktur (
”CrossbarH-Mode“) setzt sich aus einem Zylindertank mit eingesetz- ten Driftrohren, St¨utzen und Rippen zusammen. Die St¨utzen sind dabei gekreuzt ausge- richtet, wie in Abbildung 2.3 zu erkennen, woher sich auch die Bezeichnung
”Crossbar“
ableitet. Im Gegensatz zur IH-Struktur ist die CH-Struktur wegen ihrer durchgehenden St¨utzen mechanisch stabiler und die St¨utzen k¨onnen besser gek¨uhlt werden. Dar¨uber hin- aus lassen sich h¨ohere Resonanzfrequenzen und Teilchengeschwindigkeiten vonβ ≤0,5 erzielen.[10]
Typischerweise in der H211-Mode angeregt kann man durch gezielte Anpassungen der Geometrie an den Tankenden eine flache Feldverteilung generieren, erm¨oglicht durch die kapazitive Belastung der Driftr¨ohrenstruktur. Diese Feldverteilung entspricht in guter N¨aherung einer Pseudo-H21(0)-Mode. [2]
2.2.3. RFQ-Struktur
Eingesetzt nach der Ionenquelle, dient die RFQ-Struktur (
”RadioFrequencyQuadrupo- le“) zum Beschleunigen und Fokussieren zugleich.
Geht man von einem elektrischen Quadrupol-Wechselfeld aus so wirkt dieses in einem Moment beispielsweise in der x-Achse fokussierend w¨ahrend es in der y-Achse defokus- sierend wirkt. Eine halbe HF-Periodenl¨ange sp¨ater wirkt das Wechselfeld in derx-Achse
Abbildung 2.3.: Skizze einer CH-Struktur. Links ist ein transversaler Schnitt mit einge- zeichnetem magnetischen Feld abgebildet und rechts ein longitudinaler Schnitt mit eingezeichnetem elektrischen Feld.[2]
defokussierend w¨ahrend es in der y-Achse fokussierend wirkt. Im Allgemeinen gilt f¨ur die Kraft auf ein geladenes Teilchen in einem elektrischen FeldF ∝v2 und somit auch proportional zu z.B. x2. Durch diese Proportionalit¨at werden Teilchen, welche weiter vom Ursprung entfernt sind, st¨arker fokussiert als sie zuvor defokussiert wurden. Ein Ionenstrahl wird also in einer alternierenden Gradientenstruktur, wie sie in einem RFQ- Struktur zu finden ist, transversal fokussiert.
Uber eine longitudinale Modulation der Elektroden, welche das Quadrupolfeld erzeu-¨ gen, wird ebenso eine longitudinale Beschleunigung und Fokussierung erm¨oglicht. Die Modulation ist in den Zellen am Anfang des RFQs nur leicht ausgepr¨agt w¨ahrend sie am Ende deutlich erkennbar ist. Der cw-Ionenstrahl wird im ersten Abschnitt des RF- Qs nicht beschleunigt sondern in einzelne Bunche zerlegt. Im zweiten Abschnitt wird die Sollphase immer weiter angepasst, damit der Ionenstrahl mehr beschleunigt wird und weniger stark longitudinal fokussiert wird. Im letzten Teil wird der Ionenstrahl am st¨arksten beschleunigt. Der Energiegewinn pro Zelle im letzten Drittel l¨asst sich dabei
¨uber folgende Formel errechnen[21]:
∆W = qπAV0I0(kr) cos (φ)
4 (2.20)
Der Energiegewinn ist unabh¨angig von der Zellenl¨ange, welche sich gem¨aß Formel 2.59 f¨ur zunehmende Teilchenenergien vergr¨oßert. Daher sollte man eine RFQ-Struktur nur als Vorbeschleuniger einsetzen.
2.2.4. Frequenztuning
F¨ur den effektiven Betrieb einer H-Moden-Struktur ist es wichtig die exakte Resonanz- frequenz der anzuregenden Mode zu kennen. Mit Hilfe von Simulationen l¨asst sich die Resonanzfrequenz einer H-Moden-Struktur mit der Genauigkeit von typischerweise ¨uber
Abbildung 2.4.: ¨Ubersicht von H-Moden-Strukturen. In der oberen Reihe sind zwei RFQ- Strukturen (IH-RFQ und 4-vane-RFQ) und in der unteren Reihe zwei Driftr¨ohrenstrukturen (IH-DTL und CH-DTL) dargestellt.[11]
99 % bestimmen. Bei der Fertigung der Struktur kommen Ungenauigkeiten dazu, welche die tats¨achliche Resonanzfrequenz von der in der Simulation errechneten Resonanzfre- quenz weiter entfernen k¨onnen. Damit man weiterhin die ben¨otigte Resonanzfrequenz erreicht, um zum Beispiel eine effektive Ankopplung mit den Verst¨arkern zu erm¨ogli- chen, sind Frequenztuningsysteme essentiell f¨ur den Betrieb solcher Strukturen. Die zum Korrigieren eingesetzten Frequenztuner verdr¨angen das magnetische und elektrische Feld und ver¨andern somit die gespeicherte elektrische Energie We und magnetische Energie Wm. Dem Funktionsprinzip der Frequenztuner liegt das sogenannte Slater-Theorem zu- grunde:
∆f
f = gm∆Wm−ge∆We
2W (2.21)
Abgeleitet aus dieser Gleichung und gen¨ahert f¨ur kleine Volumen ∆V gibt es eine Formel f¨ur die Frequenz¨anderung in Abh¨angigkeit von der ¨Anderung des elektrischen Feldes beziehungsweise des magnetischen Feldes.[10]
∆fm = ∆Wm
W f
2 = µ0f 4W
Z
∆V
|H|2dV (2.22)
∆fe =−∆We
W f
2 =−µ0f 4W
Z
∆V
|E|2dV (2.23)
Wie zu erkennen ist, l¨asst sich die Resonanzfrequenz durch diese beiden Formeln sowohl anheben als auch absenken. Verdr¨angt man mit einem Volumenk¨orper5 elektrisches Feld, auch als kapazitives Tuning bezeichnet, wird die Resonanzfrequenz nach Formel 2.23 abgesenkt. Wird stattdessen das magnetische Feld verdr¨angt, auch induktives Tuning genannt, wird die Resonanzfrequenz nach Formel 2.22 erh¨oht.
5Als ein Beispiel f¨ur einen Volumenk¨orper, auch Tuner genannt, dient ein metallischer Tauchkolben, welchen man weiter in die Struktur reinf¨ahrt beziehungsweise rausf¨ahrt um die Resonanzfrequenz anzupassen.
2.2.5. Kenngr¨oßen f¨ur Kavit¨aten
In diesem Abschnitt erfolgt ein ¨Uberblick ¨uber die wesentlichen Hochfrequenzparameter eines Resonators. Diese Parameter dienen unter anderem dazu die elektromagnetischen Eigenschaften von Resonatoren verschiedener Bauart und unterschiedlichen Einsatzzwe- cken vergleichen zu k¨onnen.
Gespeicherte Energie
Sowohl ¨uber das elektrische Feld E als auch ¨uber das magnetische Feld H kann die in einem Resonator gespeicherte Energie bestimmt werden.
W = 1 2µ0
Z
V
|H|2dV = 1 20
Z
V
|E|2dV (2.24)
Diese beiden Formen der Energie sind nur im zeitlichen Mittel von gleichem Betrag und stehen im st¨andigen Wechsel zwischen einander.
Verlustleistung
Die Verlustleistung f¨ur die innere Resonatoroberfl¨ache A ist gegeben durch:
Pc= 1 2Rs
Z
A
|H|2dA (2.25)
Die durch das Magnetfeld induzierten Str¨ome auf der Oberfl¨ache des Resonators sind verantwortlich f¨ur die Verluste.
Beschleunigungsspannung
Koppelt man Leistung in einen Resonator so liegt im Beschleunigungsspalt zwischen den Driftr¨ohren eine maximal m¨ogliche Spannung U0 an. Angesichts der endlichen Teil- chengeschwindigkeit und der Zeitabh¨angigkeit der Felder wird ein Teilchen niemals nur diese maximale Spannung erfahren. Unter der Bedingung, dass das Teilchen bei Passage des Spalts nach der H¨alfte die maximale Spannung erf¨ahrt, kann man die tats¨achliche Spannung Ua errechnen:
Ua=
Z +L/2
−L/2
Ez(z) cos ωz
βc
dz (2.26)
Setzt man die tats¨achliche Spannung in Relation mit der maximal m¨oglichen Spannung erh¨alt man den Laufzeitfaktor6.
T(β) :=
R+L/2
−L/2 Ez(z) cos ωz
βc
dz R+L/2
−L/2 Ez(z) dz
= Ua
U0 (2.27)
Der Laufzeitfaktor wird entweder halbanalytisch oder numerisch f¨ur reale Feldvertei- lungen gewonnen. Typische Werte liegen zwischen 0,7 und 0,9 , wobei T < 1 f¨ur reale Anordnungen zu jeder Zeit gilt.
6Engl.: Transit Time Factor.
G¨ute
Die G¨ute setzt die im Resonator gespeicherte Energie in Relation zu der Verlustleistung.
Sie ist ein Maß daf¨ur, wie viele Schwingungen7 der Resonator vollziehen kann ehe die gespeicherte Energie vollst¨andig dissipiert wurde. Definiert ist die G¨ute folgendermaßen:
Q0 = ω0W Pc
= ω0µ0R
V |H|2dV Rs
R
A|H|2dA (2.28)
Regt man den Resonator mit einem Sender an, wobei die Senderfrequenz um den Bereich der Resonanzfrequenz variiert wird, erh¨alt man eine Resonanzkurve. Das Verhalten der Resonanzkurve wird dabei durch eine Lorentzkurve beschrieben.[2]
|A(ω)|= |A0| r
1 +Q20
2(ω−ω
0) ω0
2 (2.29)
Abbildung 2.5.: Bestimmung der G¨ute ¨uber die 3 dB-Methode
7Mit Schwingungen sind in diesem Fall elektromagnetische Schwingungen gemeint. Eine Schwingungs- periode beschreibt den vollst¨andigen Wechsel von der gespeicherten Energie im elektrischen Feld zu der gespeicherten Energie im magnetischen Feld und wieder zur¨uck.
|A0|entspricht der Amplitude bei der Resonanzfrequenzω0. Ausgehend von dem Verhal- ten einer Resonanzkurve kann man die G¨ute ¨uber die sogenannte 3 dB-Methode bestim- men. Hierbei wird, wie in Abbildung 2.5 gezeigt, die Frequenz ω1 beziehungsweise ω2 gesucht, bei welcher die Amplitude um 3 dB gesunken ist. F¨ur die anliegende Leistung bedeutet eine Reduzierung um 3 dB eine Halbierung. Die G¨ute l¨asst sich dann ¨uber
Q0 = ω0
ω2−ω1
(2.30) bestimmen.
Typische Werte f¨ur normalleitende Resonatoren liegen zwischen 103 und 105.[10]
Impedanz
Als ein Maß f¨ur die effektive Umsetzung von eingekoppelter Leistung in Beschleunigungs- spannung dient die Impedanz, welche wie folgt definiert wird:
Ra= Ua2
P (2.31)
Um Resonatoren unterschiedlicher L¨ange miteinander vergleichen zu k¨onnen, f¨uhrt man die l¨angennormierte Shuntimpedanz ein:
Za= Ua2
P L (2.32)
Uber die Shuntimpedanz kann die f¨¨ ur eine angedachte Beschleunigungsspannung Ua ben¨otigte Leistung P bestimmt werden.
R/Q- Wert
Bei diesem Wert handelt es sich um eine auf die G¨ute normierte Shuntimpedanz.
Ra
Q0 = Ua2
ω0W (2.33)
DerR/Q-Wert gibt an, wie gering die Abweichung des elektrischen Feldes im gesamten Volumen der Kavit¨at im Vergleich zu dem elektrischen Feld auf der Strahlachse ist.
2.2.6. Thermische Effekte
Thermische Effekte spielen bei dem Frequenztuning eines Resonators ebenfalls eine Rolle.
Entscheidend ist daf¨ur die L¨angenausdehnung des Materials[6]:
∆l=α∆T l (2.34)
Dabei istα der L¨angenausdehnungskoeffizient und definiert als:
α=γκcv
V (2.35)
γ,κundcvsind materialspezifische Eigenschaften.[8] Aus Gleichung 2.34 folgt, dass umso w¨armer ein Material wird, desto mehr breitet es sich aus. Wirft man nun einen Blick auf Gleichung 2.15 so erkennt man, dass durch die ¨Anderungen in dem Radius und der L¨ange des Resonators die Resonanzfrequenz mit steigender Temperatur absinkt. Aus Gleichung 2.15 und Gleichung 2.34 wird Gleichung 2.36 hergeleitet. Diese erlaubt im weiteren Verlauf den Vergleich zwischen theoretischen und experimentellen Werten.[6]
∆f =fR,0
1
α∆T+ 1−1
(2.36)
2.3. HF-Ein- und Auskopplung
Kapazitive und induktive Kopplung
HF-Leistung8 kann entweder induktiv oder kapazitiv in einen Resonator eingekoppelt werden.
Bei einer kapazitiven Kopplung wird meist ein Koaxial-Koppler benutzt, um an das elek- trische Feld zu koppeln. Dabei ist sowohl die Gr¨oße des Kopplers als auch die Position f¨ur die Kopplungsst¨arke entscheidend, im Folgenden Kopplungsfaktor genannt. Je st¨arker das elektrische Feld an der Position des Kopplers ist, desto gr¨oßer ist der Kopplungsfak- tor.
Bei einer induktiven Kopplung wird an das magnetische Feld gekoppelt. Zu diesem Zweck wird eine Einkoppelschleife eingesetzt, welche im Fall des Einkoppelns von Strom durch- flossen wird und ein Magnetfeld erzeugt. Im Fall des Auskoppelns wird die Schleifenfl¨ache von dem magnetischen Fluss durchdrungen und induziert eine an der Schleife anliegende Spannung. Entscheidend f¨ur den Kopplungsfaktor der Schleife ist ihre Position und die Gr¨oße ihrer Fl¨ache, wobei durch eine Drehung der Schleife der senkrecht zum magneti- schen Fluss stehende Anteil der Fl¨ache variiert werden kann.[10]
Nicht eingekoppelte Leistung, welche bei einer nicht optimalen Einkopplung auftreten kann, wird als Reflexion in Richtung des Ursprungssignals zur¨uckgeschickt.
Belastete und externe G¨ute
Um einen Resonator betreiben zu k¨onnen, ben¨otigt man f¨ur die Versorgung mit HF- Leistung eine Einkopplung und zur Diagnose der sich ausbildenden Felder eine Aus- kopplung. Beide Bauteile rufen innerhalb des Resonators zus¨atzliches Verluste hervor, weswegen man die belastete G¨ute definiert:
QL= ω0W
Pges (2.37)
Dabei istPges definiert als:
Pges =Pc+Pe+Pt (2.38)
8HF-Leistung bedeutet ausgeschrieben: Leistung im Hoch-Frequenz-Betrieb.
Uber die Kombination aus Gleichung 2.28, Gleichung 2.37 und Gleichung 2.38 folgt:¨ 1
QL = 1 Q0 + 1
Qe + 1
Qt (2.39)
F¨ur eine Kopplung, sei sie induktiv oder kapazitiv, kann analog zu dem Resonator die externe G¨ute definiert werden. Hierbei istQedie G¨ute der Einkopplung undQtdie G¨ute der Auskopplung. Die St¨arke einer Kopplung kann ¨uber die Kopplungsfaktoren bestimmt werden:
βe= Q0
Qe = Pe
Pc (2.40)
βt= Q0
Qt
= Pt
Pc
(2.41) Der Kopplungsfaktor setzt die Verluste des Resonators und der Koppler in Verh¨altnis zueinander. Bei dem Kopplungsfaktor unterscheidet man drei F¨alle:
β
<1 schwache Kopplung
= 1 kritische Kopplung
>1 starke Kopplung
(2.42)
Setzt man Gleichung 2.40 und 2.41 in Gleichung 2.39 ein, so erh¨alt man:
Q0 =QL(1 +βe+βt) (2.43)
Im Fall einer Einkopplung sollte Qe = Q0 sein und somit eine kritische Kopplung mit β = 1 vorliegen um die reflektierte Leistung zu minimieren. Bei einer Auskopplung sollte Qt Q0 gelten und demzufolge schwach gekoppelt sein. Die externe G¨ute kann f¨ur beschr¨ankte Geometrien analytisch hergeleitet werden. So gilt zum Beispiel f¨ur die externe G¨ute einer induktiven Kopplung mit einer Schleife[10]:
Qe= 100ωW
Us,02 = 100W
ω(AsB0cos (α))2 (2.44) Allgemein kann die externe G¨ute numerisch oder f¨ur simple Spezialf¨alle bestimmt wer- den.
S-Parameter
Trifft eine elektromagnetische HF-Welle auf ein HF-Bauteil so wird diese Welle zum Teil reflektiert, charakterisiert durch S11, und zum Teil transmittiert, charakterisiert durch S21. Des Weiteren kann sich zwischen der transmittierten Welle und der urspr¨unglichen
Welle eine Phasenverschiebung bilden. Mathematisch wird diese Wechselwirkung wie folgt beschrieben:
b=S×a (2.45)
Dabei beschreibt der Vektor a die einlaufende Welle, b die auslaufende Welle und S die Streumatrix. Die Streumatrix charakterisiert die Transmissions- und Reflexionsei- genschaften des HF-Bauteils. In den meisten F¨allen handelt es sich beiSum eine 2×2- Matrix.
b1 b2
=
S11 S12 S21 S22
· a1
a2
(2.46) Unter der Annahme dassa2= 0 ist9, gilt f¨ur S11 undS21:
S11= b1
a1
a2=0
(2.47) S21= b2
a1
a2=0
(2.48) Die S-Parameter stellen also Verh¨altnisse der Amplituden von den HF-Wellen dar. Sie k¨onnen direkt von einem Netzwerkanalysator gemessen werden.[6]
Zirkulator
Ein Zirkulator ist f¨ur den stabilen Betrieb von modernen Transistor-Verst¨arkern ein es- sentielles HF-Bauteil. Es gibt aktive und passive Zirkulatoren, wobei zwischen 3-Port und 4-Port Zirkulatoren unterschieden wird. Im Folgenden wird die Funktionsweise ei- nes passiven 3-Port Zirkulators n¨aher erl¨autert.
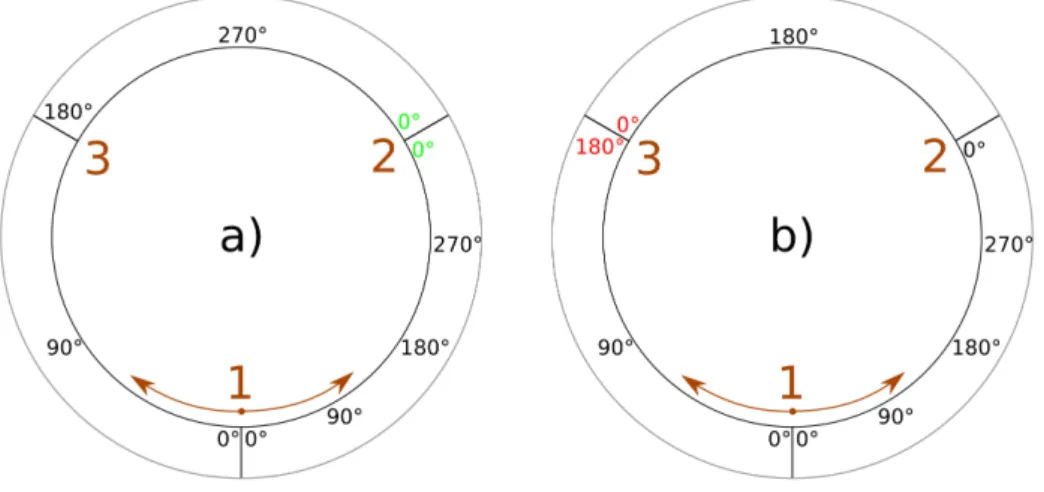
Passive 3-Port Zirkulatoren besitzen Anschl¨usse zum Ein- oder Auskoppeln eines Signa- les. Die Anschl¨usse sind in einem Winkel von 120◦ zueinander angeordnet. In der Mitte der drei Ports befindet sich ein magnetisches Material, meistens Ferrite. Durch den Ferrit wird die Laufzeit der elektromagnetischen Welle beeinflusst, wobei unterschiedliche Pro- pagationsrichtungen unterschiedliche Laufzeiten entsprechen. Wird an Port 1 eine Welle eingespeist, so teilt sich die Welle in zwei Anteile gleicher Energie auf. Die eine H¨alfte propagiert im Uhrzeigersinn und die andere H¨alfte gegen den Uhrzeigersinn durch das Zirkulatorsystem. Es ergeben sich zwei unterschiedliche Ausbreitungsgeschwindigkeiten.
Die Unterschiede in den Laufzeiten werden so gew¨ahlt, dass an Port 2 dieselbe Phase von beiden Wellenteilen anliegt, dargestellt in Fall a) in Abbildung 2.6. Damit addieren sich beide Signale zum urspr¨unglichen Signal, welches an Port 2 abgegriffen werden kann. An Port 3 hingegen treffen die Wellen mit einem Phasenunterschied von 180◦ aufeinander, dargestellt in Fall b) in Abbildung 2.6. Die Wellen l¨oschen sich gegenseitig aus und es kann kein Signal an Port 3 abgegriffen werden.
Wird andersherum an Port 2 eine Welle eingespeist, so sieht Port 1 kein Signal und
9Geht man von einem Netzwerkanalysator aus, darf kein Signal von Port 2 an Port 1 gesendet werden.
Abbildung 2.6.: Funktionsprinzip eines Zirkulators schematisch dargestellt Port 3 das volle Signal. Port 3 leitet das Signal demzufolge komplett an Port 1. Um aus dem Zirkulator zus¨atzlich einen Isolator zu machen wird an Port 3 eine Wasserlast mit 50 Ω angeschlossen. Somit wird ein Signal nur von Port 1 nach Port 2 transportiert.
Jegliches Signal von Port 2 wird in Port 3 in W¨arme dissipiert und sch¨utzt damit das an Port 1 angeschlossene Bauteil.
Die ideale Streumatrix eines Zirkulator ist definiert als:
S=
0 0 1 1 0 0 0 1 0
(2.49)
Ein Zirkulator ist ein stark temperaturabh¨angiges Bauteil mit einer schmalen Bandbrei- te. Es reichen dabei kleinste ¨Anderungen im Magnetfeld aus, zum Beispiel verursacht durch Temperatur¨anderungen, um die Frequenzeigenschaften des magnetischen Materi- als zu manipulieren und somit die Bandbreite des Zirkulators zu ver¨andern.
2.4. Strahldynamik
Phasenraum und Emittanz
Ein Ionenstrahl besteht aus vielen Teilchenpaketen, auch Bunche genannt. Diese Bunche bestehen ihrerseits aus einer Vielzahl an geladenen Teilchen. Der ideale r¨aumliche Ver- lauf des zentralen Teilchens, welches Soll-Teilchen genannt wird, wird Soll-Bahn genannt.
In den meisten F¨allen handelt es sich hierbei um die Strahlachse. Durch die gegebene r¨aumliche Ausdehnung eines Bunches, unter anderem verursacht durch Raumladungs- Effekte, befinden sich fast alle Teilchen nicht auf der Soll-Bahn. Zur abweichenden Positi- on kommt ebenfalls eine Differenz in der kinetischen Energie und ein Phasenunterschied
im Vergleich zum Soll-Teilchen dazu. Um Teilchen und deren Bahnen, welche sich nicht mit der Soll-Bahn decken, beschreiben zu k¨onnen benutzt man ein Koordinatensystem relativ zur Soll-Bahn des Soll-Teilchens.
X=
x x0 y y0 W φ
=
x dx/dz
y dy/dz
W φ
=b
Lage bezogen auf die Soll-Bahn in x-Richtung Neigung zur Soll-Bahn inx-Richtung Lage bezogen auf die Soll-Bahn in y-Richtung
Neigung zur Soll-Bahn iny-Richtung Energiedifferenz zum Soll-Teilchen Phasendifferenz zum Soll-Teilchen
(2.50)
Hierbei bilden x und x0 eine Ebene, welche den Phasenraum f¨ur die x-Komponenten aufspannt. Analog gilt dies f¨ur die y-Komponenten. In der Fortbewegungsrichtung der Teilchen wird aus zweckdienlichen Gr¨unden die Energie und Phase benutzt. Um ver- schiedene Ionenstrahle miteinander vergleichen zu k¨onnen, braucht man ein Maß daf¨ur, wie dicht und gleichm¨aßig ein Bunch im Phasenraum verteilt ist. Dieses Maß ist die Emittanz und ist definiert als[15]:
= A
π (2.51)
Die Fl¨ache im Phasenraum ist, zum Beispiel f¨ur diexx0-Ebene, definiert als[23]:
A= Z Z
dx dx0=xπ (2.52)
Erfahren Teilchen in einem Beschleuniger nur lineare Fokussier- und Beschleunigungs- kr¨afte nimmt die Verteilung im Phasenraum die Form einer Ellipse an. In Folge dessen wird bei der Bestimmung der Fl¨ache im Phasenraum versucht eine Ellipse um diese zu legen. Nichtsdestoweniger gibt es durch nicht-lineare Kr¨afte auch nicht wohl definierte Umrandungen der Fl¨ache im Phasenraum. F¨ur solche F¨alle wurde die rms-Emittanz10 eingef¨uhrt:
rms= q
x2x02−xx02 (2.53)
Die Emittanz ist durch das oben gew¨ahlte Koordinatensystem eine geschwindigkeitsab- h¨angige Gr¨oße. Die normierte Emittanz norm ist geschwindigskeitsunabh¨angig.
norm=βγ (2.54)
Die Emittanz kann im Verlauf des Beschleunigers aufgrund des Satzes von Liouville nur konstant bleiben oder wachsen. Der Satz von Liouville besagt, dass die Phasenraumdichte bei linearen Kr¨aften konstant bleiben muss.
10Die rms-Emittanz beschreibt weiterhin eine Ellipse.
Longitudinale Strahldynamik
F¨ur das elektrische Potential in einem Resonator muss die Laplace-Gleichung erf¨ullt sein:
4Φ =∇ ·~ E~ = ∂Ex
∂x +∂Ey
∂y +∂Ez
∂z = 0 (2.55)
Durchl¨auft ein Bunch einen Resonator sollte dieser longitudinal fokussiert bleiben, wes- halb ∂E∂zz < 0 immer erf¨ullt sein sollte. Die genauen Gr¨unde daf¨ur werden sp¨ater in diesem Abschnitt erkl¨art. Aus dieser Bedingung folgt, dass ∂E∂xx+∂E∂yy >0 gilt und somit der Bunch transversal defokussiert wird. Die Defokussierung muss durch Quadrupolma- gnete oder Solenoiden ausgeglichen werden um transversale Teilchenverluste am Rand der Apertur zu vermeiden.[10]
Durchl¨auft das Soll-Teilchen einen Beschleunigungsspalt ver¨andert sich seine kinetische Energie. Die Energie¨anderung wird in Bezug auf Gleichung 2.26 definiert als:
∆WHF=qUacos (ϕs) (2.56)
Dabei ist die Phase des elektrischen Felds entscheidend f¨ur die Gr¨oße der Energie¨ande- rung beziehungsweise des Energiegewinns. Die Phase setzt sich wie folgt zusammen:
ϕs =ωt−φ (2.57)
ϕs ist so definiert, dass bei ϕs = 0◦ die Phase des Soll-Teilchen optimal an die Phase des elektrischen Felds angepasst ist und der maximale Energiegewinn erm¨oglicht wird.
Durch die zeitliche Ableitung vonϕs kann ein Ausdruck f¨ur ω gewonnen werden[22]:
ωn= 2π
Lnβc (2.58)
ωist die Frequenz des elektrischen Felds,βdie Geschwindigkeit des Soll-Teilchens undL die Flugstrecke des Teilchens zwischen zwei Beschleunigungsspaltmitten, gegeben durch das Design des Resonators. Durch Erf¨ullen dieser Bedingung kann das Soll-Teilchen effektiv beschleunigt werden. Ausgehend von der Grundmodeω0kann ¨uber jede beliebige h¨ohere Mode ωn =nω0 diese Bedingung11 erf¨ullt werden. Zwei bekannte Bedingungen, welche sich daraus ableiten lassen, sind[4]:
LW= 1
2βλ (π−Mode) LA=βλ (2π−Mode) (2.59)
LWist als Wider¨oe’sche Bedingung bekannt und dient als Grundlage f¨ur zum Beispiel IH- und CH-Strukturen. In der π-Mode betrieben sind die Spalte alternierend geladen. Die Phase des elektrischen Felds unterscheidet sich von Spalt zu Spalt umπ. Teilchenpakete befinden sich deshalb nur in jedem zweiten Spalt. Im Gegensatz dazu wird eine Alvarez- Struktur in der 2π-Mode mit der BedingungLAbetrieben. Die Spalte besitzen die selbe Polarit¨at und jeder Spalt kann einen Bunch beschleunigen.
11n∈Q>0.
Betrachten wir nun Teilchen, bei denen es sich nicht um das Soll-Teilchen handelt, welche trotzdem Teil des Bunches sind. F¨ur sie k¨onnen ¨uber die Betrachtung der Energiedifferenz und Phasendifferenz zum Soll-Teilchen und unter der Annahme, dass zwischen zwei Spaltenβ = konst.ist, zwei gekoppelte Differentialgleichungen aufgestellt werden.[21]
d (ϕ−ϕs)
ds =−2π W −Ws
mc2λγs3βs3 (2.60)
d (W −Ws)
ds =qE0T(cos(ϕ)−cosϕs)) (2.61) Durch die Entkoppelung der Gleichungen (2.60) und (2.61) erh¨alt man eine Differenti- algleichung 2. Ordnung.
d2ϕ
ds2 =ϕ00=− 2πqE0T
mc2λγs3βs3(cos(ϕ)−cos(ϕs)) (2.62) Benutzt man ds = dϕ/ϕ0 und multipliziert Gleichung (2.62) mit ϕ0 erh¨alt man durch Integration eine Hamilton-Funktion ¨ahnliche Beziehung.[21]
Aw2
2 +B(sin(ϕ)−ϕcos(ϕs)) =Hϕ (2.63) mit
A≡ 2π
λγs3βs3 B ≡ qE0T
mc2 w≡ W −Ws
mc2
Der erste Term ist ein ¨Aquivalent zur kinetischen Energie und der zweite Term ein ¨Aqui- valent zur potentiellen Energie. Ausgehend von einer typischen Soll-Phase vonϕs =−30◦ findet sich der Verlauf des im zweiten Terms dargestellten Potential in Abbildung 2.7 wieder.
Es ist zu erkennen, dass es f¨ur den Bereich −π < ϕs < 0 einen Potentialtopf gibt.
Ebenso ist bekannt, dass ein Teilchen nur in dem Bereich −π/2< ϕs < π/2 kinetische Energie dazu gewinnen kann. Die Schnittmenge beider Bereiche entspricht dem Bereich
−π/2 < ϕs < 0. In diesem k¨onnen Teilchen in einer stabilen Bewegung beschleunigt werden. Teilchen, welche sp¨ater den Spalt erreichen, somit eine geringere Phasenbezie- hung zum elektrischen Feld besitzen als das Soll-Teilchen, werden st¨arker beschleunigt als das Soll-Teilchen. Teilchen, welche fr¨uher den Spalt erreichen, somit eine gr¨oßere Phasenbeziehung zum elektrischen Feld besitzen als das Soll-Teilchen, werden schw¨acher beschleunigt als das Soll-Teilchen. Die Abgrenzung von einer stabilen Bewegung im Pha- senraum erfolgt durch die sogenannte Separatrix.
Geht man von ϕs = −90◦ aus, so wird das Soll-Teilchen nicht beschleunigt. Andere Teilchen mit einer Phasenbeziehung ungleich der des Soll-Teilchens werden diesem in Bezug auf die Geschwindigkeit angepasst. Schnellere Teilchen werden abgebremst und vice versa. Der Bunch wird longitudinal fokussiert. Wird ein Resonator mit dieser Pha- senbeziehung betrieben spricht man von einem Rebuncher.
Abbildung 2.7.: Im ersten Teil der Abbildung ist der Verlauf des beschleunigenden Feldes dargestellt. Im zweiten Teil folgt das dazugeh¨orige Potential. Im letzten Teil ist die Oszillation der Teilchen um das Soll-Teilchen zu sehen. Die Abgrenzung von einer stabilen Bewegung im Phasenraum zu einer in- stabilen Bewegung erfolgt durch die Separatrix, dargestellt in gr¨un. Die gelbe Kurve im Potential und im beschleunigenden Feld beschreibt ein Teilchen auf einer Bahn innerhalb der Separatrix, w¨ahrend die gr¨une Kurve f¨ur Teilchen gilt, welche sich auf der Separatrix befinden.[7]
3. Messungen
Das folgende Kapitel beschreibt die vorgenommenen Untersuchungen an der FRANZ- CH-Struktur. Bei dem CH-DTL-Beschleuniger, genauer gesagt CH-Rebuncher, handelt es sich um einen 5-Spalt Beschleuniger.
Das Design des Rebunchers ist in der Arbeit
”Entwicklung und Test des 175 MHz CH- Rebunchers f¨ur das FRANZ-Projekt“ von A. Seibel beschrieben.[14] Eine Ansicht des Aufbaus der CH-Struktur findet sich im Anhang in Abbildung B.4. In der Arbeit ist das K¨uhl-Konzept der Struktur zu finden. Die mit CST Microwave Studio simulierten HF-Parameter sind in Tabelle 3.1 aufgelistet.
HF-Parameter Wert
ResonanzfrequenzfR 175 MHz Unbelastete G¨uteQ0 14000 Effektive SpannungUeff 325 kV Effektive ShuntimpedanzZeff 80 MΩ/m
Verlustleistung Pc 5 kW Ra/Q0 Wert 1600 Ω Tabelle 3.1.: Simulierte HF-Parameter
Vor dem Einbau der Einkoppelschleife wurde mit Hilfe von zwei kleinen Pick-Ups eine un- belastete G¨ute vonQ0≈12600 gemessen. Nach dem Zusammenbau des CH-Rebunchers wurde die belastete G¨ute ¨uber einen Netzwerkanalysator mitQL≈5600 gemessen. Vor der Verkupferung der Struktur wurde ebenfalls die belastete G¨ute mitQL,Edelstahl≈800 bestimmt.[14] F¨ur die G¨ute folgt nach Gleichung 2.28 folgende Proportionalit¨at:
Q∝ 1 Rs ∝
rσ
µr (3.1)
Dabei liegt der Fokus auf der Materialabh¨angigkeit der G¨ute, da nach der Verkupferung in erster N¨aherung von einer gleichbleibenden Geometrie ausgegangen wird.
Eigenschaften Kupfer Edelstahl 1.4301
Elektr. Leitf¨ahigkeitσ 58·106S/m[17] 1,4·106S/m[16]
Magnet. Permeabilit¨atµr 0,9999936 Vs/Am[19] 1,021 Vs/Am[18]
Tabelle 3.2.: Materialeigenschaften
Unter Einbezug der in Tabelle 3.2 aufgelisteten Materialeigenschaften kann nun durch
Formel 3.1 eine Absch¨atzung getroffen werden, wie sich die G¨ute durch die Verkupferung ver¨andert:
QL,Kupfer=QL,Edelstahl
rσKupferµr,Edelstahl
σEdelstahlµr,Kupfer
= 5096 (3.2)
Unter der Annahme, dass bei beiden Messungen gleich kritisch eingekoppelt wurde, stimmt innerhalb einer Toleranz von 10 % die Messung vor der Verkupferung mit der darauf folgenden Messung ¨uberein.
3.1. Thermisches Frequenztuning
3.1.1. Aufbau
Die K¨uhlanschl¨usse des CH-Rebunchers wurden in 12 Abschnitte aufgeteilt: vier Tank- Sektionen, vier St¨utzen, die Tankdeckel, die Einkoppelschleife, der dynamische Tuner und der statische Tuner. Hierbei bilden die beiden Tankdeckel einen Abschnitt. Die K¨uhlung wurde an das Einh¨angethermostat
”LAUDE E200“ im Verbund mit dem Edelstahlbad- gef¨aß
”LAUDA ecoline 003“ angeschlossen.
Wegen der begrenzten Pumpleistung des Einh¨angethermostats wurden die zw¨olf Ab- schnitte auf neun reduziert. Die Einkoppelschleife, der dynamische Tuner und der stati- sche Tuner wurden nicht durchflossen, da ihre thermische Ausdehnung keinen Einfluss auf die Resonanzfrequenz der CH-Struktur hat. Um den Druck in den K¨uhlleitungen aufrecht zu erhalten wurden die neun Abschnitte in zwei H¨alften geteilt, welche parallel geschaltet sind. Eine H¨alfte besteht aus zwei Tank-Sektionen, zwei St¨utzen und einem Tankdeckel. F¨ur die Temperaturmessung wurde ein Temperaturf¨uhler, ausgelesen mit einem Multimeter, an der Struktur fixiert. Der F¨uhler wurde in der N¨ahe von zwei im Tank verlaufenden K¨uhlleitungen an der Tankoberfl¨ache angebracht. Des Weiteren wur- de an drei Stellen mittels eines Infrarot-Thermometers die Temperatur bestimmt. Die Stellen waren mit schwarzem Klebeband pr¨apariert um Reflexionen zu vermeiden. Eine Position befand sich auf dem Tankdeckel, eine im unteren Bereich des Tanks und eine im mittleren Bereich nahe des dynamischen Tuners, wobei die letzten Beiden in Abbildung 3.1 zu erkennen sind. Als letztes wurde die Temperatur des Wassers im Edelstahlbadge- f¨aß, im Folgenden auch als Wasserbecken bezeichnet, gemessen.
Nach der ersten Messung wurde der Versuchsaufbau optimiert. Die zweite Messung war urspr¨unglich mit drei Pt100 Kabelf¨uhler der Klasse B, angebracht mit W¨armeleitpaste von Fischerelektronik und ausgelesen mit einem Voltmeter von Voltcraft, angesetzt. An- gedacht war es, die Anschlussklemmen des Voltmeters zwischen den drei Pt100-F¨uhlern rotieren zu lassen. Sobald das Voltmeter an den n¨achsten F¨uhler angeschlossen wur- de hat sich das Ger¨at eigenst¨andig neukalibriert. Die Neukalibrierung verhindert eine konsistente Messung von mehreren F¨uhlern mit einem Voltmeter wodurch nur eine Stel- le dauerhaft gemessen werden konnte. Als Position wurde der Tankdeckel ausgew¨ahlt, wie in Abbildung 3.1 zu sehen. Diese Auswahl wurde aus Gr¨unden des thermischen Gleichgewichts getroffen. Aufgund der geringen Energiedissipation am Deckel wurde der Wasserdurchfluß dort gering designt. Durch den geringeren Durchfluss entspricht die
Abbildung 3.1.: Versuchsaufbau des thermischen Frequenztunings. In blau und rot sind die K¨uhlschl¨auche zu sehen. Punkt 1 zeigt den Thermostat inkl. Was- sergef¨aß und Punkt 2 zeigt die Thermof¨uhler. Punkt 3 und Punkt 4 veranschaulichen den Pick-Up und den Anschluss der Einkoppelschleife.
Oberfl¨achentemperatur des Deckels in erster N¨aherung der Gleichgewichtstemperatur im Inneren der CH-Struktur.
3.1.2. Messdaten & Auswertung
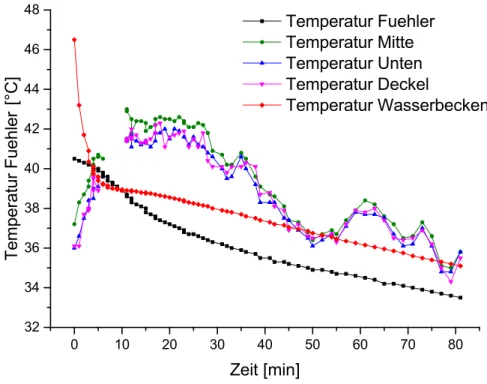
Bei der ersten Messung wurde die Soll-Temperatur im Wasserbecken auf 46,5◦C am Einh¨angethermostat eingestellt. Der CH-Rebuncher wurde dann ¨uber mehrere Stun- den von dem aufgeheizten Wasser durchflossen. W¨ahrend dem Aufheizen war die Luft- umw¨alzanlage des FRANZ-Bunkers in Betrieb. F¨ur die Messungen wurde die Anlange heruntergefahren. Zu Beginn der Messungen war die Heizung des Einh¨angethermostats ausgeschaltet. Abbildung 3.2 zeigt den gemessenen Temperaturverlauf der verschiedenen Sensoren. Es ist zu erkennen, dass nach einem sprunghaften Absinken die Temperatur des Wasserbeckens die Temperatur der CH-Struktur angenommen hat. Weiterhin ist zu sehen, dass die Messdaten des Infrarot-Thermometers nicht aussagekr¨aftig sind. Der anf¨angliche Anstieg kann durch die ausgeschaltete Luftumw¨alzanlage erkl¨art werden.
0 10 20 30 40 50 60 70 80 32
34 36 38 40 42 44 46 48
TemperaturFuehler[°C]
Zeit [min]
Temperatur Fuehler
Temperatur Mitte
Temperatur Unten
Temperatur Deckel
Temperatur Wasserbecken
Abbildung 3.2.: 1. Messung; zeitlicher Temperaturverlauf des Abk¨uhlvorgangs
0 10 20 30 40 50 60 70 80 90 100
33 34 35 36 37 38 39 40 41
Temperatur[°C]
Zeit [min]
Temperatur Wasserbecken
Temperatur Deckel
Temperatur Mitte
Temperatur Oben
Abbildung 3.3.: 2. Messung; zeitlicher Temperaturverlauf des Abk¨uhlvorgangs
Danach schwanken die gemessenen Werte zu sehr um den tats¨achlichen Oberfl¨achentem- peraturen des Resonators zu entsprechen. Es wird vermutet, dass das schwarze Klebe- band zum Beispiel durch Lufteinschl¨usse nicht die gleiche Temperatur wie die Oberfl¨ache hatte und somit keine zuverl¨assigen Daten gemessen wurden. Zwischen Minute 5 und Minute 10 waren die ¨Anderungen in der Resonanzfrequenz zeitlich zu schnell aufeinander folgend um mit dem Infarot-Thermometer alle drei Positionen messen zu k¨onnen.
F¨ur die zweite Messung, dargestellt in Abbildung 3.3, wurde beim Heizen die Luftum- w¨alzanlage heruntergefahren. Die Wasserbeckentemperatur des Einh¨angethermostats wur- de auf 41◦C eingestellt. Innerhalb der ersten 20 Minuten ist die Temperatur des Deckels kaum gefallen. Dies ist sowohl ¨uber die begrenzte W¨armeleitf¨ahigkeit des Edelstahls zu erkl¨aren als auch mit dem geringen Pumpendruck, welcher zu einem niedrigen Wasser- fluss f¨uhrt. Nach 55 Minuten wurden noch zwei weitere Voltmeter akquiriert und an die beiden anderen F¨uhler angeschlossen. Die Voltmeter besaßen eine Genauigkeit von einer Nachkommastelle, w¨ahrend das weiterhin angeschlossene Voltmeter zwei Nachkommas- tellen anzeigen konnte. Diese Ungenauigkeit ist deutlich in Abbildung 3.3 zu erkennen.
Um die Messdaten mit den theoretischen Vorhersagen verkn¨upfen zu k¨onnen ben¨otigt man Gleichung 2.36. Setzt man dort die ben¨otigten Materialkonstanten ein und geht von einer Temperaturdifferenz von 1◦C aus, erh¨alt man:
L¨angenausdehnungskoeffizient ∆f
Kupfer 16,5·1061/K -2,89 kHz/K
Edelstahl 1.4301 16·1061/K -2,8 kHz/K
Tabelle 3.3.: Vergleich der Frequenzdifferenz von Kupfer und Edelstahl 1.4301 f¨ur 1◦C Tr¨agt man nun von den Messdaten die Resonanzfrequenz gegen die Temperatur auf, kann man durch einen linearen Fit die gesuchte Steigung ermitteln. Abbildung 3.4 und Abbildung 3.5 veranschaulichen dieses Vorgehen f¨ur den F¨uhler in der ersten Messung und den Deckelsensor in der zweiten Messung.
1.Messung: F¨uhler 2.Messung: Deckel gemittelt ¨uber alle Fits
Steigung [kHz/◦C] -2,72 -3,1 -2,81
Tabelle 3.4.: Linearer Fit der Messdaten
Vergleicht man die theoretischen Vorhersagen mit dem Mittelwert aus allen Fits von bei- den Messdurchl¨aufen, ergibt sich eine maximale Abweichung von ∆fMessung/∆fTheorie<
3 % f¨ur Kupfer. Zu Edelstahl wurde eine geringere Abweichung von unter 1 % gemessen.
33 34 35 36 37 38 39 40 41 174,860
174,865 174,870 174,875 174,880 174,885
Resonanzfrequenz [MHz]
Temperatur Fuehler [°C]
Resonanzfrequenz
Linearer Fit
Abbildung 3.4.: 1. Messung; Resonanzfrequenz in Abh¨angigkeit der gemessenen Tempe- ratur des Temperaturf¨uhlers
35,0 35,5 36,0 36,5 37,0 37,5 38,0 38,5 39,0 39,5 174,855
174,860 174,865 174,870 174,875
Resonanzfrequenz
Linearer Fit
Resonanzfrequenz[MHz]
Temperatur Deckel [°C]
Abbildung 3.5.: 2. Messung; Resonanzfrequenz in Abh¨angigkeit der gemessenen Tempe- ratur des Deckels
3.2. Aufbau & Kontrollsystem der Konditionierung
Die 12 Abschnitte des K¨uhlsystems werden nun ¨uber einen Y-f¨ormigen Verteiler an die K¨uhlwasserversorgung angeschlossen. Desweiteren wird die Wassertemperatur am jewei- ligen Ausgang eines Abschnitts mit einem Pt100-F¨uhler gemessen. Wegen ¨Anderungen in der Positionierung der Bauteile des FRANZ-Beschleunigers im FRANZ-Bunker musste die Einkoppelschleife mit einem der beiden Tuner getauscht werden. Der statische Tu- ner wurde nun oben montiert w¨ahrend die Einkoppelschleife und der dynamische Tuner jeweils an einer Seite montiert wurden.
Bei h¨oheren Leistungspegeln wurde in Betracht gezogen, Temperaturmessungen ebenso mit einer W¨armebildkamera zu t¨atigen. Jedoch strahlt die CH-Struktur zu stark Gamma- Strahlung ab um den Bunker w¨ahrend einer laufenden Messung zu betreten.
Die CH-Struktur wurde an einen 12 kW Verst¨arker von Bruker angeschlossen. Zwischen dem Verst¨arker und CH-Struktur sollte urspr¨unglich ein Zirkulator verbaut werden. Mit angeschlossenem Zirkulator war jedoch die den Verst¨arker erreichende Reflexion zu hoch.
Der Halbleiter-Verst¨arker ist f¨ur eine maximal reflektierte Leistung von 840 W ausgelegt, welche bei der geplanten Leistung von 5 kW ¨ubertroffen wird. Der Zirkulator wurde des- halb ausgebaut. Mit weiteren Untersuchen des Zirkulators besch¨aftigt sich ein eigener Abschnitt ab Seite 53. Weiterhin wurde zwischen dem Verst¨arker und der CH-Struktur ein bidirektionaler Richtkoppler eingebaut. An die beiden Auskopplungen wurden ¨uber Verbindungskabel jeweils ein Power-Meter angeschlossen. Gemessen wird damit die Vor- w¨artsleistung1 und die Reflexion2. Desweiteren wurde an einen der beiden Pick-Ups der CH-Struktur ebenso ein Power-Meter angeschlossen, an welchem die Transmission3 ge- messen wird, sp¨ater auch als eingekoppelte Leistung bezeichnet.
Der komplette elektronische Aufbau wird in Abbildung 3.6 als Flussdiagramm darge- stellt und in Abbildung B.3 abgelichtet. Urspr¨unglich wurde das Signal aus dem Fre- quenzgenerator direkt zum Verst¨arker geleitet. Jedoch fing der Verst¨arker ab ungef¨ahr 2 kW Vorw¨artsleistung immer wieder an in St¨orung zu gehen. Dabei ist davon auszuge- hen, dass es sich um schnelle Reflexionsanstiege als Ursache handelte. Um die Anstiege in der Reflexion abzufangen wurde das Signal des Frequenzgenerators durch die Regel- elektronik, zu sehen in Abbildung B.1, geleitet bevor es den Verst¨arker erreicht. Bei der angeschlossenen Regelelektronik handelt es sich um einen Amplitudenbegrenzer. Der Amplitudenbegrenzer vergleicht die Amplituden der Vorw¨artsleistung mit der Amplitude der Reflexion. Sollte Letztere in Relation zu der Amplitude der Vorw¨artsleistung zu groß werden, wird der Signalpegel auf ein Minimum reduziert. Er ist auf eine Reaktionszeit von mehreren 10µs ausgelegt. Der Ausgangs-Pegel des Signals wird ¨uber ein Potentio- meter mit Skalenknopf eingestellt. Trotz funktionierendem Amplitudenbegrenzer ist der Verst¨arker weiterhin nach einer beliebigen Zeit in St¨orung gegangen. Die Reflexionsan- stiege m¨ussen also innerhalb von einigenµs vom Verst¨arker erkannt worden sein, somit schneller als der Amplitudenbegrenzer reagieren kann.
1Entspricht der vom Verst¨arker ausgehenden in Richtung der CH-Struktur propagierenden Leistung.
2Entspricht der an der CH-Struktur reflektierten in Richtung des Verst¨arkers propagierenden Leistung.
3Entspricht der in den Feldern der CH-Struktur gespeicherten Leistung.
Vorwärtsleistung Reflexion Eingekoppelte Leistung
Signal des Frequenzgenerator
Power-Meter
Oszilloskop
Verstärker Amplituden-
begrenzer Tuner-Regelung
Abbildung 3.6.: Flussdiagramm des Messaufbau. Abgerundete Boxen stellen Signale dar w¨ahrend die Rechtecke ein HF-Bauteil darstellen.
Der Amplitudenbegrenzer blieb weiterhin angeschlossen, da sich dar¨uber der Pegel fei- ner einstellen ließ. Es wird vermutet, dass der Grund f¨ur die schnellen Reflexionsanstiege in der verlegten 3 1/8”Koaxial-Leitung zwischen der CH-Struktur und dem Verst¨arker liegt. In dieser k¨onnte es durch feine Schmutzpartikel bei hohen Leistungen zu Span- nungs¨uberschl¨agen gekommen sein, welche einen Reflexionsanstieg verursachen w¨urden.
Diese Vermutung wird dadurch bekr¨aftigt, dass sobald der Verst¨arker in St¨orung geschal- tet hat weder ein Anstieg im Druck zu sehen war noch das Oszilloskop einen Anstieg in der Reflexion angezeigt hatte bevor die St¨orung auftrat. Damit die Resonanzfrequenz des Resonators ¨uber die Dauer des Versuches konstant bei 175 MHz bleibt, muss der dynamische Tuner dementsprechend verfahren werden. Angetrieben von einem feinen Schrittmotor wird der Tuner von der Tuner-Regelung gesteuert, zu sehen in Abbildung B.2. Diese regelt die Tunerposition auf einen vorgegeben konstanten Phasenunterschied zwischen der Vorw¨artsleistung und der Transmission.
Der Phasenversatz wird grob ¨uber einen Laufzeitunterschied eingestellt. Die Feineinstel- lung erfolgt ¨uber eine Stellschraube, welche in Abbildung B.2 rechts von der mittleren
Anzeigeeinheit mit der BeschriftungPhase zu erkennen ist. Bei Bedarf kann die Position des Tuners auch per Hand angepasst werden. Dar¨uber hinaus wurde noch ein Oszillo- skop angeschlossen um ein Feedback der Signale in Echtzeit zu bekommen und m¨ogliche h¨ohere Moden bestimmen zu k¨onnen.
Zum Protokollieren der Daten kam das Kontrollsystem MNDACS zum Einsatz. In der Programmiersprache Java geschrieben ist die Lauff¨ahigkeit des Programms auf den meis- ten Systemen gew¨ahrleistet. MNDACS erm¨oglicht die Kommunikation mit sowohl lokal, als auch ¨uber ein Netzwerk angeschlossenen Ger¨aten. In einem Netzwerk k¨onnen meh- rere Instanzen von MNDACS auf verschiedenen Rechnern gleichzeitig ohne Probleme gestartet werden. Ein dezentrales Verteilungs- und Registrierungsprotokoll, ¨uber wel- ches die Instanzen kommunizieren k¨onnen, erm¨oglicht dies. MNDACS kann ¨uber das Protokollieren der Daten hinaus auch als Steuerungseinheit f¨ur die angeschlossenen Ge- r¨ate dienen.[20]
Die Treiber, um mit dem Frequenzgenerator, den Power-Metern und den Temperatursen- soren zu kommunizieren, waren bereits vorhanden. Lediglich der Treiber f¨ur die Druck- messr¨ohre musste noch im Rahmen dieser Arbeit erstellt werden. Vom Programm wur- den folgende Daten w¨ahrend den Messungen aufgezeichnet: 15 Temperatursensoren, der Druck, drei Leistungen, die Sendefrequenz, der Signalpegel und die Phase. Die Druck- messr¨ohre wurde ¨uber die RS232-Schnittstelle ins Netzwerk eingegliedert w¨ahrend die Temperatursensoren ¨uber einen eigenen Controller mit dem Netzwerk verbunden wur- den.
3.3. Konditionierung
Zu Beginn der Konditionierung betrug der Druck in der Kavit¨at 7,4·10−8mbar. Im ersten oberen Drittel ist der relative Temperaturverlauf dargestellt. Dabei wird von den Außenf¨uhlern, den St¨utzen und den Tank-Sektionen jeweils nur der Verlauf des w¨armsten F¨uhlers abgebildet. Weiterhin wird nicht die absolute Temperatur, sondern eine Tempe- raturerh¨ohung gezeigt.
-0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 0.25 0.3
11:00 11:15 11:30 11:45 12:00 12:15 12:30 12:45 13:00
Temperaturerhoehung [°C]
Aussenfuehler
Stuetzen Tank
Deckel Einkoppelschleife
Stat. Tuner Dyn. Tuner
0 2 4 6 8 10 12 14
11:00 11:15 11:30 11:45 12:00 12:15 12:30 12:45 13:00
0 0.1 0.2 0.3 0.4 0.5
Leistung [W] Leistung [W]
Reflexion (Rechte Achse) Vorwaertsleistung (Linke Achse)
Eingek. Leistung (Linke Achse)
10-7 10-6
11:00 11:15 11:30 11:45 12:00 12:15 12:30 12:45 13:00
Druck [mbar]
Uhrzeit
Abbildung 3.7.: Konditionierung bis 10 W
F¨ur den jeweiligen Referenzpunkt der Temperaturf¨uhler wurde ein Mittelwert genom- men, welcher aus einer 44-Stunden Messung ohne anliegende Leistung gebildet wurde.
Dar¨uber hinaus wurde auf die Temperaturrohdaten ein moving-average-Filter angewen-
det um das erkennbare Rauschen der Werte zu verringern. Im zweiten Drittel ist der Verlauf der drei gemessenen Leistungen dargestellt. Hierbei gibt die rechte Achse Infor- mationen ¨uber die Reflexion. Im letzten Drittel werden die Druckdaten abgebildet.
-0.1 -0.05 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
07:30 08:00 08:30 09:00 09:30 10:00 10:30 11:00 11:30 12:00
Temperaturerhoehung [°C]
Aussenfuehler Stuetzen
Tank Deckel
Einkoppelschleife Stat. Tuner
Dyn. Tuner
0 10 20 30 40 50 60 70 80
07:30 08:00 08:30 09:00 09:30 10:00 10:30 11:00 11:30 12:00
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Leistung [W] Leistung [W]
Reflexion (Rechte Achse) Vorwaertsleistung (Linke Achse)
Eingek. Leistung (Linke Achse)
10-7 10-6
07:30 08:00 08:30 09:00 09:30 10:00 10:30 11:00 11:30 12:00
Druck [mbar]
Uhrzeit
Abbildung 3.8.: Konditionierung bis 60 W
Der erste Plot, zu sehen in Abbildung 3.7, zeigt die Konditionierung bis 10 W. Die eingekoppelte Leistung n¨ahert sich stetig an die Vorw¨artsleistung an, es kann also lang- sam immer mehr Leistung in den CH-Rebuncher eingekoppelt werden. Weiterhin ist zu erkennen, dass die ersten 6 Minuten das Power-Meter f¨ur die Messung der Vorw¨artsleis- tung keine Messdaten geliefert hat, was durch einen erneuten Verbindungsaufbau ¨uber MNDACS behoben werden konnte. Ebenso ist der Einfluss des Tuners auf die Reflexion, die Vorw¨artsleistung und den Vakuumdruck erkennbar. Der Tuner wurde bei den gr¨o-
![Abbildung 1.2.: Konzept des FRANZ Bunch Kompressors.[5] Beschriftung ist in Englisch.](https://thumb-eu.123doks.com/thumbv2/1library_info/5282262.1676234/4.892.214.672.328.681/abbildung-konzept-franz-bunch-kompressors-beschriftung-englisch.webp)
![Abbildung 2.2.: Skizze einer IH-Struktur. In dieser Momentaufnahme ist die elektrische Ladung und das resultierende elektrische Feld abgebildet.[6]](https://thumb-eu.123doks.com/thumbv2/1library_info/5282262.1676234/9.892.199.694.259.509/abbildung-skizze-struktur-momentaufnahme-elektrische-resultierende-elektrische-abgebildet.webp)
![Abbildung 2.3.: Skizze einer CH-Struktur. Links ist ein transversaler Schnitt mit einge- einge-zeichnetem magnetischen Feld abgebildet und rechts ein longitudinaler Schnitt mit eingezeichnetem elektrischen Feld.[2]](https://thumb-eu.123doks.com/thumbv2/1library_info/5282262.1676234/10.892.187.712.128.361/abbildung-transversaler-zeichnetem-magnetischen-abgebildet-longitudinaler-eingezeichnetem-elektrischen.webp)
![Abbildung 2.4.: ¨ Ubersicht von H-Moden-Strukturen. In der oberen Reihe sind zwei RFQ- RFQ-Strukturen (IH-RFQ und 4-vane-RFQ) und in der unteren Reihe zwei Driftr¨ ohrenstrukturen (IH-DTL und CH-DTL) dargestellt.[11]](https://thumb-eu.123doks.com/thumbv2/1library_info/5282262.1676234/11.892.213.679.127.435/abbildung-ubersicht-strukturen-strukturen-unteren-driftr-ohrenstrukturen-dargestellt.webp)