Neural Image Compression:
Lossy and Lossless Algorithms
PhD Thesis by Fabian Mentzer
Diss. ETH No. 27379
D I S S . E T H N O . 27379
N E U R A L I M AG E C O M P R E S S I O N : L O S S Y A N D L O S S L E S S A L G O R I T H M S
A dissertation submitted to
E T H Z U R I C H
for the degree of
D O C T O R O F S C I E N C E S
presented by
FA B I A N J U L I U S M E N T Z E R
Master of Science in Information Technology and Electrical Engineering (ETH Zurich)
born 18th February 1994 citizen of Schluein, GR, Switzerland
accepted on the recommendation of Prof. Dr. Luc Van Gool, examiner, Prof. Dr. Tomer Michaeli, co-examiner,
Dr. Eirikur Agustsson, co-examiner.
2021
A B S T R AC T
In recent years, image compression with neural networks has received a lot of at- tention. In this thesis, we present four algorithms for neural image compression, two for lossless compression, and two for lossy compression.
We start by introducing the first practical learned lossless image compression system, which outperforms the popular lossless algorithms PNG, WebP, and JPEG2000. It relies on a fully parallelizable hierarchical probabilistic model for adaptive entropy coding based on convolutional neural networks (CNNs), which we optimize end-to-end for the compression task. We show how this approach links to autoregressive generative models such as PixelCNN, and how it is orders of magnitudes faster, because it i) models the image distribution jointly with learned auxiliary representations instead of exclusively modeling the image distribution in RGB space, and ii) only requires three forward-passes to predict the probabilities of all pixels, instead of one for each pixel. As a result, when sampling we obtain speedups of over two orders of magnitude compared to the fastest PixelCNN variant (Multiscale-PixelCNN).
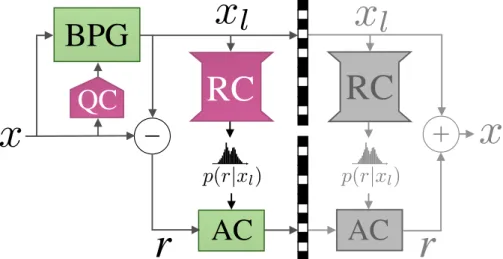
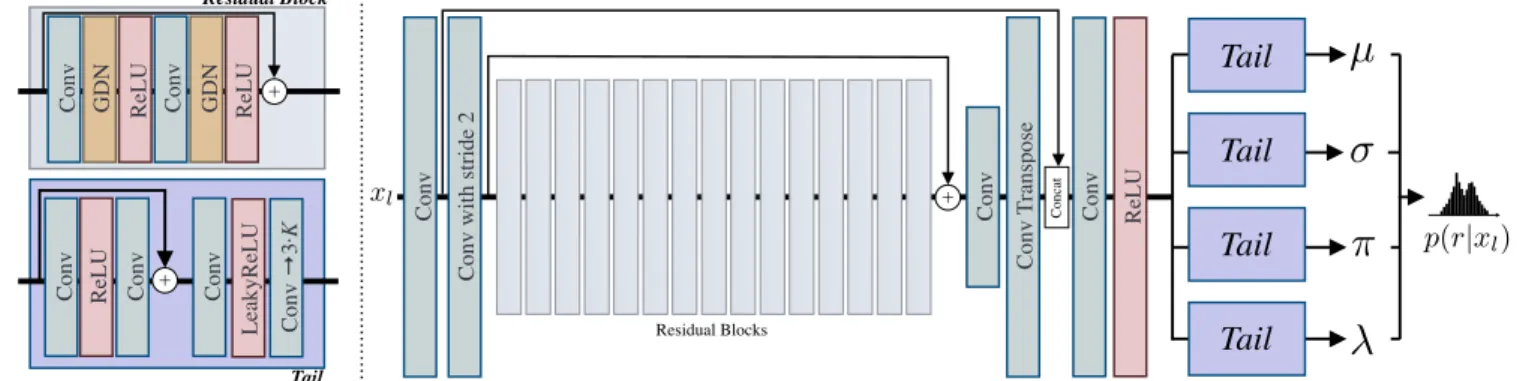
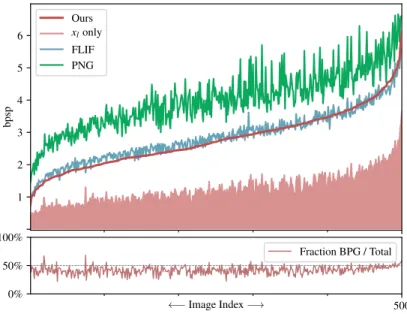
The second lossless algorithm we show is built on top of the powerful lossy image compression algorithm BPG, which outperforms the previously men- tioned approach. In the presented approach, the original image is first decom- posed into the lossy reconstruction obtained after compressing it with BPG and the corresponding residual. We then model the distribution of the residual with a CNN-based probabilistic model that is conditioned on the BPG reconstruction, and combine it with entropy coding to losslessly encode the residual. Finally, the image is stored using the concatenation of the bitstreams produced by BPG and the learned residual coder.
We start the second part of the thesis by addressing one of the challenges of lossy neural image compression: controlling the bitrate of the latent representing the image. We propose a new technique to navigate the rate-distortion trade-off for an compressive auto-encoder. The main idea is to directly model the bitrate of the latent representation by using a “context model”, a 3D-CNN which learns a conditional probability model of the latent distribution of the auto-encoder.
During training, the auto-encoder makes use of the context model to estimate
the bitrate of its representation, and the context model is concurrently updated
to learn the dependencies between the symbols in the latent representation, to
better estimate the probability of the latent representation, and thus the bitrate.
For the final approach, we extensively study how to combine Generative
Adversarial Networks and neural lossy compression to obtain a state-of-the-art
generative lossy compression system. In particular, we investigate normalization
layers, generator and discriminator architectures, training strategies, as well as
perceptual losses. In contrast to previous work, i) we obtain visually pleasing
reconstructions that are perceptually similar to the input, ii) we operate in a
broad range of bitrates, and iii) our approach can be applied to high-resolution
images. We bridge the gap between rate-distortion-perception theory and
practice by evaluating our approach both quantitatively with various perceptual
metrics, and with a user study. The study shows that our method is preferred to
previous approaches even if they use more than 2 × the bitrate.
Z U S A M M E N FA S S U N G
Bildkomprimierung mit neuronalen Netzen wird stetig populärer. In dieser Dissertation präsentieren wir vier Algorithmen für die neuronale Bildkompri- mierung, zwei für verlustfreie Komprimierung und zwei für verlustbehaftete Komprimierung.
Wir beginnen mit dem ersten praxistauglichen gelernten verlustfreien Kom- primierungsalgorithmus, der die populären Algorithmen PNG, WebP, und JPEG2000 übertrifft. Der Algorithmus setzt auf ein komplett parallelisierbares hierarchisches Wahrscheinlichkeitsmodell, das wir für adaptives Arithmetic Co- ding verwenden. Das Model ist ein “Convolutional Neural Network” (CNN, zu dt. etwa “neuronales Faltungsnetzwerk”) und wird end-to-end für die Kompri- mierung gelernt. Wir zeigen, wie dieser Ansatz mit autoregressiven generativen Modellen in Bezug steht, wie zum Beispiel PixelCNN, und wie unser Ansatz Grössenordnungen schneller ist, weil er i) die Wahrscheinlichkeitsverteilung von Bildern zusammen mit den gelernten Repräsentationen lernt, anstatt nur die Bildverteilung im RGB-Raum zu lernen, und ii) nur drei Forwardpasses durch das CNN benötigt, um die Verteilung von jedem Pixel anzugeben, anstatt einen Forwarpass pro Pixel. Dadurch erreichen wir ein bis zu zwei Grössenordnungen schnelleres Sampling als das schnellste PixelCNN (Multiscale-PixelCNN).
Der zweite verlustfreie Algorithmus, den wir zeigen, übertrifft den ersten Algorithmus, indem er auf dem leistungsfähigen verlustbehafteten Bildkom- primierungsalgorithmus BPG aufbaut. Der gezeigte Algorithmus teilt das Ur- sprungsbild in zwei Teile auf: erstens das Ergebnis von BPG, und zweitens das Residuum zwischen diesem Ergebnis und dem Ursprungsbild. Zusammen ergeben die zwei Teile das Ursprungsbild. Wir modellieren dann die Wahrschein- lichkeitsverteilung vom Residuum gegeben dem BPG-Ergebnis mit einem CNN, und kombinieren es wieder mit Arithmetic Coding, um das Residuum verlustfrei zu speichern. Indem wir auch das BPG-Ergebnis speichern, speichern wir das Ursprungsbild so verlustfrei.
Der zweite Teil dieser Dissertation beginnt mit einer Arbeit, die eine der
Herausforderungen im verlustfreien Komprimieren behandelt, nämlich das
Kontrollieren der Bitrate der Repräsentation des Bildes. Wir führen eine neue
Methode ein, die es erlaubt, den Trade-off zwischen Bitrate und Veränderung
des Ausgabebildes (engl. rate-distortion trade-off) mit einem Auto-encoder
zu navigieren. Die Hauptidee ist es, direkt die Bitrate der Repräsentation mit
einem “Context-Modell”, zu modellieren, wofür wir ein 3D-CNN verwenden.
die Abhängigkeiten zwischen den Symbolen der Repräsentation, um deren Wahrscheinlichkeitsverteilung, und somit die Bitrate, besser abzuschätzen. Mit unseren Experimenten zeigen wir, dass unser Ansatz den State of the Art gemessen in MS-SSIM erreicht.
Für den letzten Ansatz untersuchen wir im Detail, wie Generative Adversarial Networks (GANs) mit neuronaler verlustbehafteter Komprimierung kombiniert werden können, um ein State of the Art generatives Komprimierungssystem zu erhalten. Wir untersuchen Normalisierungsarten, Generator- und Discriminator- Architekturen, Trainingsstrategien, sowie Lossfunktionen, die die menschliche Wahrnehmung annähern. Im Gegensatz zu bisherigen Ansätzen i) erhalten wir visuell ansprechende Ausgangsbilder, die sehr nahe am Eingangsbild sind, ii) funktionieren wir in einem breiten Bereich von Bitrates, und iii) funktioniert unser Ansatz für hochaufgelöste Bilder. Wir schliessen die Lücke zwischen
“Rate-distortion-perception” Theorie und Anwendung, indem wir unseren An-
satz sowohl quantitativ mit verschiedenen Metriken als auch mit einer Anwen-
derstudie evaluieren. Die Anwenderstudie zeigt, dass unser Ansatz vorherigen
Ansätzen vorgezogen wird, selbst wenn diese mehr als zweimal so viel Bits
benötigen.
P U B L I C AT I O N S
The following publications are included as a whole or in parts in this thesis:
• Fabian Mentzer et al. “Conditional Probability Models for Deep Im- age Compression.” In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). 2018.
• Fabian Mentzer et al. “Practical Full Resolution Learned Lossless Im- age Compression.” In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). 2019.
• Fabian Mentzer et al. “Learning Better Lossless Compression Using Lossy Compression.” In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). 2020.
• Fabian Mentzer et al. “High-Fidelity Generative Image Compression.” In:
Advances in Neural Information Processing Systems (NeurIPS). 2020.
Furthermore, the following publications were part of my PhD research, but are not covered in this thesis:
• Robert Torfason et al. “Towards Image Understanding from Deep Com- pression Without Decoding.” In: International Conference on Learning Representations (ICLR). 2018.
• Eirikur Agustsson et al. “Soft-to-Hard Vector Quantization for End-to- End Learning Compressible Representations.” In: Advances in Neural Information Processing Systems (NIPS). 2017.
• Eirikur Agustsson et al. “Generative Adversarial Networks for Extreme Learned Image Compression.” In: The IEEE International Conference on Computer Vision (ICCV). 2019.
• Ren Yang et al. “Learning for Video Compression With Hierarchical Quality and Recurrent Enhancement.” In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). 2020.
• Ren Yang et al. “Learning for Video Compression with Recurrent Auto-
Encoder and Recurrent Probability Model.” Under Review. 2020.
AC K N OW L E D G M E N T S
I would like to thank Prof. Luc Van Gool for giving me the opportunity to pursue a PhD in his lab. Thanks to him, I was able to freely choose research directions that interested me, while being financially supported. I would like to thank Radu Timofte for believing in me and supporting my work. The environment of the lab helped me to stay focused and motivated, and I spent many great hours there.
This thesis would not have been possible without my two close collaborators, Eirikur Agustsson and Michael Tschannen. I met Michael when I was doing my master, where he supervised my second semester thesis. Supervised by him and Eirikur, I wrote my master thesis, and since then our collaboration has been steadily going throughout the PhD. Without their insightful comments and relentless persistence, this work would not have been possible.
I would like to thank Sergi Caelles, for making the days at the lab brighter with discussions, and for helping me with tough decisions. I would like to thank Kevis Maninis for helping me settle into PhD life with his advice early in the studies. The final work presented in this thesis was done during an internship at Google, and I would like to thank George Toderici for the many hours he spent supporting the paper. Without him, we would not have the thorough user study that we have now, and the paper would be overall less solid. I would like to thank Luisa Blom for supporting me mentally through many tough deadlines. I would like to thank my family for the thorough support throughout my studies.
Thanks to them, I was able to focus on my studies.
C O N T E N T S
1 I N T RO D U C T I O N 1
1.1 Lossless Image Compression . . . . 2
1.2 Lossy Image Compression . . . . 3
2 B AC K G RO U N D 5 2.1 Rate Loss and Information Theory . . . . 5
2.2 Adaptive Arithmetic Coding . . . . 7
Part I L O S S L E S S A L G O R I T H M S 9 3 R E L AT E D W O R K O N L O S S L E S S C O M P R E S S I O N 11 3.1 Learned Lossless Compression . . . . 11
3.2 Likelihood-Based Generative Models . . . . 11
3.3 Engineered Codecs . . . . 12
3.4 Context Models in Lossy Compression . . . . 12
3.5 Continuous Likelihood Models for Compression . . . . 12
4 P R AC T I C A L F U L L R E S O L U T I O N L E A R N E D L O S S L E S S I M - AG E C O M P R E S S I O N 15 4.1 Overview . . . . 15
4.2 Method . . . . 17
4.3 Experiments . . . . 23
4.4 Results . . . . 25
4.5 Conclusion . . . . 29
4.A Encoding and Decoding Details . . . . 30
4.B Comparison on ImageNet64 . . . . 33
4.C Note on Comparing Times for 32 × 32 Images . . . . 33
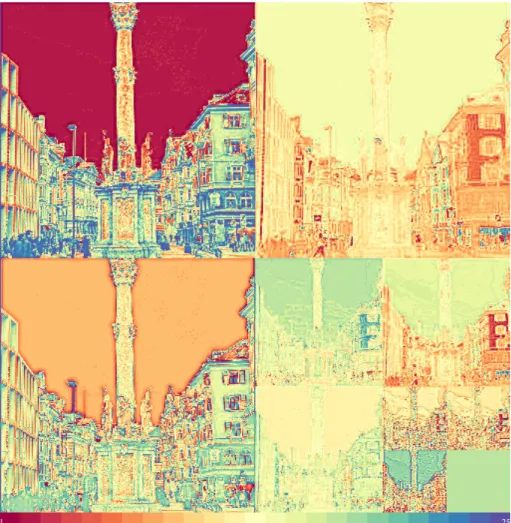
4.D Visualizing Representations . . . . 35
4.E Architectures of Baselines . . . . 36
5 L E A R N I N G B E T T E R L O S S L E S S C O M P R E S S I O N U S I N G L O S S Y C O M P R E S S I O N 39 5.1 Overview . . . . 39
5.2 Related Work . . . . 41
5.3 Proposed Method . . . . 42
5.4 Experiments . . . . 48
5.5 Results and Discussion . . . . 50
5.6 Conclusion . . . . 53
5.A Q-Classifier Architecture . . . . 54
5.B BPG Performance . . . . 54
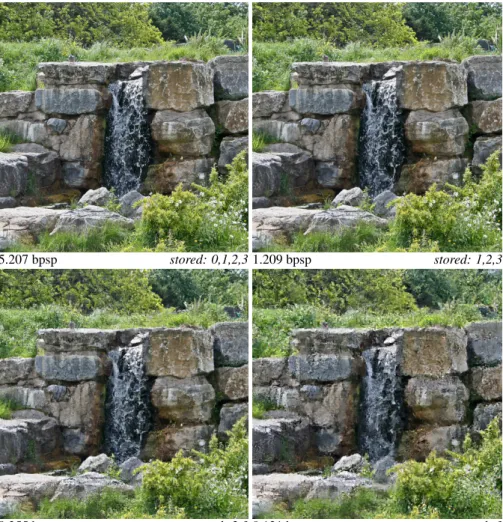
5.C Examples from the testing sets . . . . 55
Part II L O S S Y A L G O R I T H M S 57 6 C O N D I T I O N A L P RO B A B I L I T Y M O D E L S F O R D E E P I M AG E C O M - P R E S S I O N 59 6.1 Overview . . . . 59
6.2 Related work . . . . 61
6.3 Compressive Auto-encoder . . . . 62
6.4 Proposed method . . . . 62
6.5 Experiments . . . . 68
6.6 Discussion . . . . 73
6.7 Conclusions . . . . 75
6.A Visual examples . . . . 76
6.B 3D probability classifier . . . . 81
7 H I G H - FI D E L I T Y G E N E R AT I V E I M AG E C O M P R E S S I O N 83 7.1 Introduction . . . . 83
7.2 Related work . . . . 85
7.3 Method . . . . 87
7.4 Experiments . . . . 91
7.5 Results . . . . 94
7.6 Conclusion . . . . 99
7.A Comparing MSE models based on Minnen et al. [69] . . . . . 100
7.B Using LPIPS without a GAN loss . . . . 101
7.C Qualitative Comparison to Previous Generative Approaches . . 102
7.D ChannelNorm . . . . 104
7.E Further Results on User Study . . . . 105
7.F Further Quantitative Results . . . . 108
7.G Implementation Details . . . . 110
7.H Further Visual Results . . . . 112
8 D I S C U S S I O N 113 8.1 Summary of Contributions . . . . 113
8.2 Limitations and Future Work . . . . 114
B I B L I O G R A P H Y 117
1
I N T RO D U C T I O N
In the time since the wide-spread adoption of smartphones with high-quality cameras, the number of images taken every year is increasing, having reached an estimated 1 trillion images in 2015 [79]. Typical smartphone sensors today contain roughly 12 million pixels (e.g., the iPhone 12’s cameras [39]). In a standard setup, each pixel captures red, green, and blue intensities (RGB), and supports 256 possible values for each color, which can be represented with 8 bits per color, or 24 bits per pixel. Thus, an uncompressed 12 MP image would require roughly 36 megabytes to store. Since this is impractically large, image compression algorithms are employed. Instead of storing the raw value of each pixel of the camera sensor with 24 bits, the image is converted to a more
“compressible” representation first. We can broadly distinguish two categories:
In lossless image compression, the input image is reconstructed pixel-perfectly.
These algorithms exploit redundancy and other structures of images to reduce the number of bits needed to store the image (“bitrate” for short). In lossy image compression, the reconstructed image is allowed to be different from the input.
Here, in addition to exploiting redundancy, approaches focus on trading off bitrate with how “good” the reconstruction is. This effectively means that the compression algorithm is allowed to throw away hard-to-compress structure or texture. Intuitively, the more bits, the closer the reconstruction can be to the input. This latter class of algorithms is what is in widespread use, a prominent example being JPEG [106]. However, lossless compression algorithms are also frequently used, e.g., in professional photography or medical imaging.
Recently, deep neural networks have been employed for image compression.
The idea is to formulate the image compression problem via a suitable loss function, and to parametrize the “compression algorithm” with a neural network.
By training this neural network on a sufficiently large corpus of images we can obtain compression algorithms that outperform their non-learned predecessors.
The key questions that naturally arise are i) which loss function to use, and ii) which neural network to use. While the first question has an obvious answer for lossless algorithms (the bitrate is all we can minimize, as pixel-perfect reconstruction is a hard requirement), it is non-obvious for lossy algorithms.
Intuitively, we are looking for lossy image compression algorithms that only
throw away parts of the image that a human observer does not notice, and that do
not introduce any obvious compression artifacts, i.e., we are looking for a loss
function that captures how humans perceive reconstructions. As an example,
x
E y D
x
0Lossless Coding using p(y)
. . . 10111010 . . .
Figure 1.1: High-level schematic of the auto-encoder structure commonly used in neural lossy image compression. The image x is fed through an encoder network E to obtain the representation y, which is written to disk losslessly using the learned probability distribution p(y). From y, we can obtain the reconstruction x
0using the decoder D.
humans generally do not care if the leaves of a tree face slightly different directions in the reconstruction as long as the tree type, color, lighting, and so on are still the same. If we had such a human-perception-based loss function, we could backpropagate through it to learn perfect compression algorithms.
Alas, we do not have such a function, and recent efforts in neural lossy image compression have focused on approximating it.
Regarding the second question, which neural network to use, the general structure on a high level is similar for many lossy compression works, and shown in Fig. 1.1: A representation y of the image x is learned by training a convolutional neural network (CNN)-based auto-encoder (E, D), and the representation y is compressed by training a second neural network to approxi- mate its probability distribution p(y). For lossless compression works, fewer approaches exists, and they differ more significantly in structure, as we shall see later.
In this thesis, we present neural network-based image compression ap- proaches for both the lossless and the lossy regime.
1.1 L O S S L E S S I M AG E C O M P R E S S I O N
Lossless image compression focuses on leveraging redundancies in natural images to save bits. For example, PNG [81] is based on simple autoregressive filters that update pixels based on surrounding pixels, allowing for efficient compression of, e.g., uniform image regions. There has been comparatively little work on using neural networks for lossless image compression specifically.
However, the generative modelling literature is inherently related to the problem.
There, the goal is to learn representations of images and to sample new images,
1.2
L O S S Y I M AG E C O M P R E S S I O Nboth of which is achieved by learning probability models of real images. An example in this category is PixelCNN [76]. Such a model can in theory be used for lossless compression, by pairing it with a entropy coding algorithm. After all (as we will also see in this thesis), all we need for lossless compression is a probability distribution of the data you are trying to compress, and an entropy coding algorithm that transforms data to a bitstream, using the distribution.
While such approaches can be used for lossless compression, state-of-the- art generative models rely on autoregressive factorizations and are too slow for the task. We discuss this in Part I of this thesis, where we present two approaches to neural network-based lossless image compression. The first approach (Ch. 4) learns a hierarchical auto-encoder that decomposes the input image into a sequence of ever smaller representations. We then use smaller representations to predict the probability distribution of bigger representations recursively. By training the network to minimize bitrate, we learn good models of the probability distributions, and are able to efficiently store images. In the second approach (Ch. 5), we leverage the lossy image compression algorithm BPG for lossless compression, by learning the distribution of residuals with a neural network.
1.2 L O S S Y I M AG E C O M P R E S S I O N
A well-known and widely-used lossy image compression algorithm is JPEG [106], introduced in 1980. Since then, numerous alternatives have been proposed, including JPEG2000 [95], WebP [111], and, recently, BPG [9], which is based on the state-of-the-art video codec HEVC [93]. Around 2015, deep neural net- works (DNNs) trained for image compression led to promising results [99, 101, 97, 7, 1, 58], achieving better performance than many traditional techniques for image compression. These approaches are directly minimizing the desired trade-off. Initial works focused on minimizing the “rate-distortion” trade-off r + λd, where d is a pairwise (between pairs of images) distortion metric (e.g., mean-squared error (MSE), or the Multi-Scale Structural Similarity Metric (MS-SSIM)) which measures how close is the reconstruction to the input. Later work also takes perceptual quality d
Vinto account [3, 11], which measures how “realistic” the output looks, regardless of how close it is to the input, by measuring a divergence d
Vbetween the distribution p
Xof real images and the distribution of reconstructions p
Xˆ, giving rise to the triple “rate-distortion- perception” trade-off r + λd + βd
V[11]. Such a loss nicely approximates human preferences without requiring an exact mathematical expression for it.
In Part II we present two approaches for neural network-based lossy image
compression. The first approach (Ch. 6) studies the rate-distortion setting, and
focuses on minimizing the rate R with a sophisticated entropy model. The goal
is to model the distribution of the image representation, to be able to efficiently
store that representation with entropy coding. The second approach (Ch. 7)
studies the rate-distortion-perception setting, and uses a GAN loss to improve
the perceptual quality of reconstructions.
2
BAC K G RO U N D
2.1 R AT E L O S S A N D I N F O R M AT I O N T H E O RY
One common theme of the four works we present in the following is that all algorithms eventually compress a stream of symbols s = (s
1, . . . , s
N) losslessly. In Ch. 4, we compress the RGB image and a set of auxiliary variables, in Ch. 5 we compress the RGB residual, and in Ch. 6, 7, we compress the latent variables. To do this, we always approximate the real (unkown) distribution q(s) of the symbols with a model p(s), and we use an entropy coding algorithm (adaptive arithmetic coding to be precise, see below) to encode the symbols to the bitstream.
1The underlying intuition from Information Theory is that the more we know about the distribution of the symbols, the more efficient we can compress them, by assigning shorter bit-sequences to more likely symbols.
Doing this will yield short average bitstreams.
To minimize the number of bits we use, we always add a rate loss L
Rto whatever objective we have. By minimizing L
R, we minimize the bits needed to store s , where
L
R= E
s∼q[ − log p(s)] (2.1) is a cross-entropy between the real distribution q(s) and the model p(s).
In this section, we want to briefly show how this loss can be derived using simple information theory tools. We want to highlight that we consider com- pressing the entire s at once, instead of compressing its parts s
i. In contrast to what we usually see in Information Theory theorems, we do not model the s
ias identically distributed. Instead, in our setup, the representations s
(a), s
(b)of different images a, b are independent and identically distributed.
We can model the symbol stream as a random variable S = (S
1, . . . , S
N) , where each S
iis also a random variable, that takes value in the finite set S.
We denote the (unknown) joint distribution with q(S), and the (unknown)
1 We note that in the literature, e.g., in Cover & Thomas [21], the real distribution is more
commonly denoted with p, reserving q for the model. We flip this notation as we are mainly
interested in the model throughout the following chapters.
distribution of individual symbols S
iwith q
i(S
i) . The symbols S have the following joint entropy:
H(q(S)) =H(q
1(S
1)) + H(q
2(S
2) | q
1(S
1)) + · · · +
H(q
N(S
N) | q
1(S
1), . . . , q
N−1(S
N−1)) (2.2) Note that we cannot simplify this further without making assumptions about q(S ) , and that q(S) specifies the probability of many possible symbol streams, as it specifies the probability for each possible realization s, and there are |S|
Nsuch realizations.
2We are interested in encoding realizations of S losslessly into a bitstream, such that they can be recovered exactly.
Let L
?be the expected minimum code length, as in [21, Theorem 5.4.1, p113]. From that Theorem, we know that
H(q(S )) ≤ L
?< H(q(S)) + 1. (2.3) Note that here, we consider the whole stream S, and L
?is the expected mini- mum code length to encode one realization s . While this code length might be shorter than H(S ) for one particular realization, the lemma says that we cannot go below the entropy in expectation.
However, as mentioned, in general we do not know the real underlying distribution q(S) . Instead, we introduce a model p of q . Following [21, Theorem 5.4.3, p115], we know that using p(S) to encode a sequence S that is actually distributed according to q(S) incurs an overhead of
L ¯ = D
KL(q(S), p(S )) bits, (2.4) and the overall expected code length r becomes
r = L
?+ ¯ L < 1 + H(q(S )) + D
KL(q(S), p(S))
= 1 + E
S∼q[ − log p(S)]
| {z }
cross-entropy
, (2.5)
which shows that we can in fact minimize L
Rin Eq. 2.1 to minimize the expected rate.
2 For a typical compressive auto-encoder (e.g., Ballé et al., 2018, [8]), and a moderately large
image of 768×512 pixels, s will have N = 768/8 · 512/8 · 192 = 1 179 648 entries already.
2.2
A DA P T I V E A R I T H M E T I C C O D I N GIn Ch. 4, 5, and 7, we introduce a conditional independence assumption into the model p. In particular, we decompose S into two parts, a side-information Z, and the latents S
0, where
p(S) = p(S
0, Z) = p(Z)p(S
0| Z) = p(Z) · Y
i
p
i(S
i0| Z).
We first encode Z using p(Z), and then encode the elements S
i0of S
0condition- ally independent with their models p
i(S
i0| Z). We note that Eq. 2.5 still holds, but can be extended to
r < 1 + E
(S0,Z)∼q[ − log p(Z)] + E
(S0,Z)∼q[ − log p(S
0| Z)], (2.6) where q now represents the unknown joint distribution q(S
0, Z).
2.2 A DA P T I V E A R I T H M E T I C C O D I N G
To actually encode a realization s into a bitstream, a so called “entropy coding algorithm” can be used. The idea of these algorithms is to use a probability distribution model p to efficiently encode symbols, since p allows the coder to assign shorter bit-sequences to more likely symbols. Depending on the implementation, these algorithms may incur a non-negligible bit-overhead. For example, Huffman coding [37] only achieves optimal rates for probabilities p
i(S
i) that are powers of two. To allow more flexible models, we use adaptive arithmetic coding in all presented works.
Adaptive Arithmetic Coding [113] is a strategy that almost achieves the theoretical rate bound from above (for long enough symbol streams). It encodes the entire stream into a single number a
0∈ [0, 1) , by subdividing [0, 1) in each step (a step means encoding one symbol) as follows: Let a, b be the bounds of the current step (initialized to a = 0 and b = 1 for the initial interval [0, 1)). We divide the interval [a, b) into |S| sections where the length of the j -th section is p
j(S
j)/(b − a) (the algorithms is called adaptive because it allows different p
jfor different symbols). Then we pick the interval corresponding to the current
symbol, i.e., we update a, b to be the boundaries of this interval. We proceed
recursively until no symbols are left. Finally, we transmit a
0, which is a rounded
to the smallest number of bits s.t. a
0≥ a. Receiving a
0together with the
knowledge of the number of encoded symbols and p uniquely specifies the
stream and allows the receiver to recover the symbols perfectly.
PART I
L O S S L E S S A L G O R I T H M S
3
R E L AT E D W O R K O N L O S S L E S S C O M P R E S S I O N
3.1 L E A R N E D L O S S L E S S C O M P R E S S I O N
The work we present in Chapter 4 was the first work to present a neural network based algorithm for lossless image compression that worked at high resolu- tions in practical runtimes. Other work focused on smaller data sets such as MNIST [54], CIFAR-10 [51], and ImageNet32/64 [18], where they achieve state-of-the-art results. In particular, Townsend et al. [103] and Kingma et al. [48] leverage the “bits-back scheme” [34] for lossless compression of an image stream, where the overall bitrate of the stream is reduced by leveraging previously transmitted information. Motivated by progress in generative model- ing using (continuous) flow-based models (e.g., [83, 47]), Hoogeboom et al. [35]
propose Integer Discrete Flows (IDFs), defining an invertible transformation for discrete data.
3.2 L I K E L I H O O D - B A S E D G E N E R AT I V E M O D E L S
Essentially all likelihood-based discrete generative models can be used with an arithmetic coder for lossless compression. A prominent group of models that obtain state-of-the-art performance are variants of the auto-regressive PixelRN- N/PixelCNN [76, 75]. PixelRNN and PixelCNN organize the pixels of the image distribution as a sequence and predict the distribution of each pixel conditionally on (all) previous pixels using an RNN and a CNN with masked convolutions, respectively. These models hence require a number of network evaluations equal to the number of predicted sub-pixels
3(3 · W · H). PixelCNN++ [88]
improves on this in various ways, including modeling the joint distribution of each pixel, thereby eliminating conditioning on previous channels and reduc- ing to W · H forward passes. MS-PixelCNN [82] parallelizes PixelCNN by reducing dependencies between blocks of pixels and processing them in parallel with shallow PixelCNNs, requiring O(log W H ) forward passes. Kolesnikov et al. [50] equip PixelCNN with auxiliary variables (grayscale version of the image or RGB pyramid) to encourage modeling of high-level features, thereby improving the overall modeling performance. Chen et al. [17], and Parmar et
3 A RGB “pixel” has 3 “sub-pixels”, one in each channel.
al. [78] propose autoregressive models similar to PixelCNN/PixelRNN, but they additionally rely on attention mechanisms to increase the receptive field.
3.3 E N G I N E E R E D C O D E C S
The well-known PNG [81] operates in two stages: first the image is reversibly transformed to a more compressible representation with a simple autoregressive filter that updates pixels based on surrounding pixels, then it is compressed with the deflate algorithm [23]. WebP [111] uses more involved transformations, including the use of entire image fragments to encode new pixels and a custom entropy coding scheme. JPEG2000 [95] includes a lossless mode where tiles are reversibly transformed before the coding step, instead of irreversibly removing frequencies. The current state-of-the-art (non-learned) algorithm is FLIF [92].
It relies on powerful preprocessing and a sophisticated entropy coding method based on CABAC [84] called MANIAC, which grows a dynamic decision tree per channel as an adaptive context model during encoding.
3.4 C O N T E X T M O D E L S I N L O S S Y C O M P R E S S I O N
In lossy compression, context models have been studied as a way to efficiently losslessly encode the obtained image representations. Classical approaches are discussed in [62, 67, 68, 114, 112]. Recent learned approaches include [58, 63, 69], where shallow autoregressive models over latents are learned. Ballé et al. [8] present a model somewhat similar to the work presented next: Their auto-encoder is similar to our fist scale, and the hyper encoder/decoder is similar to our second scale. However, since they train for lossy image compression, their auto-encoder predicts RGB pixels directly. Also, they predict uncertainties σ for the latent instead of a mixture of logistics. Finally, instead of learning a probability distribution for their “hyper-latent” ( z
(2)in our formulation), they assume the entries to be i.i.d. and fit a univariate non-parametric density model, whereas in our model, many more stages can be trained and applied recursively.
3.5 C O N T I N U O U S L I K E L I H O O D M O D E L S F O R C O M P R E S S I O N
The objective of continuous likelihood models, such as VAEs [45] and RealNVP
[24], where p(x
0) is a continuous distribution, is closely related to its discrete
counterpart. In particular, by setting x
0= x + u where x is the discrete image
and u is uniform quantization noise, the continuous likelihood of p(x
0) is a
lower bound on the likelihood of the discrete p(x) = ˆ E
u[p(x
0)] [96]. However,
there are two challenges for deploying such models for compression. First,
3.5
C O N T I N U O U S L I K E L I H O O D M O D E L S F O R C O M P R E S S I O Nthe discrete likelihood p(x) ˆ needs to be available (which involves a non-trivial
integration step). Additionally, the memory complexity of (adaptive) arithmetic
coding depends on the size of the domain of the variables of the factorization
of p ˆ (see Sec. 2.2 on (adaptive) arithmetic coding). Since the domain grows
exponentially in the number of pixels in x, unless p ˆ is factorizable, it is not
feasible to use it with adaptive arithmetic coding.
4
P R AC T I C A L F U L L R E S O L U T I O N L E A R N E D L O S S L E S S I M AG E C O M P R E S S I O N
We propose the first practical learned lossless image compression system, named L3C, and show that it outperforms the popular engineered codecs, PNG, WebP and JPEG2000. At the core of our method is a fully parallelizable hierarchical probabilistic model for adaptive entropy coding which is optimized end-to-end for the compression task. In contrast to recent autoregressive discrete proba- bilistic models such as PixelCNN, our method i) models the image distribution jointly with learned auxiliary representations instead of exclusively modeling the image distribution in RGB space, and ii) only requires three forward-passes to predict all pixel probabilities instead of one for each pixel. As a result, L3C obtains over two orders of magnitude speedups when sampling compared to the fastest PixelCNN variant (Multiscale-PixelCNN). Furthermore, we find that learning the auxiliary representation is crucial and outperforms predefined auxiliary representations such as an RGB pyramid significantly.
4.1 OV E RV I E W
Our system (see Fig. 4.1 for an overview) is based on a hierarchy of fully parallel learned feature extractors and predictors which are trained jointly for the compression task. Our code is available online.
4The role of the feature extractors is to build an auxiliary hierarchical feature representation which helps the predictors to model both the image and the auxiliary features themselves. Our experiments show that learning the feature representations is crucial, and heuristic (predefined) choices such as a multiscale RGB pyramid lead to suboptimal performance.
In more detail, to encode an image x, we feed it through the S feature extractors E
(s)and predictors D
(s). Then, we obtain the predictions of the probability distributions p, for both x and the auxiliary features z
(s), in parallel in a single forward pass. These predictions are then used with an adaptive arithmetic encoder to obtain a compressed bitstream of both x and the auxiliary features (Sec. 2.2 provides an introduction to arithmetic coding). However, the arithmetic decoder now needs p to be able to decode the bitstream. Starting from the lowest scale of auxiliary features z
(S), for which we assume a uniform prior, D
(S)obtains a prediction of the distribution of the auxiliary features of
4 github.com/fab-jul/L3C-PyTorch
<latexit sha1_base64="06rEWvWPE+mR3cLra/xJ60akb/c=">AAAKdHicvVZbb9MwGM3GZV0YsAFv8GCoJnWsq5JymzQqTdoDPA6JXaQkmhzHac0cJ3IcttbKz+GVR/4Lj/wJnrGTDbreNECNq0qfv/PZx+fE0mc/oSQVlvV9YfHGzVu3l2rL5p2Vu/fur649OEzjjCN8gGIa82MfppgShg8EERQfJxzDyKf4yD/d0/jRZ8xTErOPop9gL4JdRkKCoFCpk7WlL6br4y5hUpDTQUKQyDjOHb0d+BQT1uFxxgLPdJNuGEHRS7GIIOKxdFHm4/Nc2vkUrD8DG+TSalmvJsFxGKqJxtvTYV/jL6fjSOOvp+OBxrcVHnB45mRUcAhEj7BmSCjt7KkTFs55oGE11W8DbG2Bzc3GVil6OGU1y2T/T2qkCPURxTt/S6Un5c6DGVS6aqjo36gmqhpj/x9VF65XZ+MI4fzNvI7CeVjqV+6pX7mpszXOw1VUuauocldna5yHq0HlrgaVuzpb43VdxSy40o5N82S1rhpmMcB4YF8E9d1669Hgx7uv+ydrC9/cIEZZhJlAFKapY1uJ8CTkgigS1fqyFCcQncIudlTIYIRTTxYPihysq0wAwpirPxOgyA6vkDBK037kq8qivY5iOjkRO78kGIf8aFLayUS47UnCkkxghsqjhRkFIgb6PQMCwjEStK8C1eGJUgdQD3KIhHr1XCHQjirdDJ+hOIogC567iHBlRuDYnnQ17Fw+pToNvUlLTzc8aYKh4bI4wE7agwnulOvLG3HWIwI39WVpEsYwB4q501aeg2KvDSDrdr6TqxMUHlAs5O9LlEufqlM+ta1cfWl79LuOB4ftlv2i1f5g13fbRjlqxmPjmdEwbOONsWu8N/aNAwPVVmrt2k7t7fJP84lZN9fL0sWFizUPjSvDbP0C1iAzRg==</latexit>
<latexit sha1_base64="u3Q1uGUfKwtLn7PsOvnF1uOcuVk=">AAAHVnictVXdbtMwFM7Guo7CYAVuJm4MFVLHuirpkEAalSZxw+WQ2I+URJPjnLRmjh05Dl0X5TkQPADPBC+DsJtN69auYmM7UaTj8x2fz+eLdRIkjKbKtn/Pzd9bqCxWl+7XHjxcfvR4pf5kLxWZJLBLBBPyIMApMMphV1HF4CCRgOOAwX5w9MHg+19BplTwz2qYgB/jHqcRJVjp0GF94WfNC6BHea7o0UlCicokFK4ph74IyrtSZDz0a17Si2Ks+imoGBMpco9kARwXuVNcgQ1nYCdFbrenoiKK9MLAnavhwOBvNB5KPHAzpiRGqk95K6KMdQOWwQvH9lHTbulnDW1soPX15kZ54vGQ3SqDw/PQpSQyJAy2rkdkFmXdkxlEJmss6SZEUzua4L5ORz0JwM+ZTuW+OwVn892+kDfo77/0lBBOsAV3J+dMuttX8/rd/auYwMML86hWO1xp2G17ZGjScU6dxvbq6ndtP3YO63PfvFCQLAauCMNp6jp2ovwcS0U1iR4eWQoJJke4B652OY4h9fPRRC3QKx0JUSSkfrlCo+j4jhzHaTqMA505GlCXMROcih2fEUxCQTwt7GYqeufnlCeZAk7Ko0UZQ0ogM9BRSCUQxYba0TOS6u4Q6WOJidJj/wKBUVT3zWFARBxjHr72CJVajNB1/NwzsHv2L+k2TZG2Wa75eQ2NmcdFCG7axwl0y/3ldRj0qYKWuSktyjlIpJm7Ha05GtVaQ3nDKbaKQn9K5/KHm3T2Om1ns9355DS2n1mlLVnPrZdW03Kst9a29dHasXYtUlmubFbeV7qLvxb/VCvVapk6P3e656l1waorfwE0mTsw</latexit> <latexit sha1_base64="06rEWvWPE+mR3cLra/xJ60akb/c=">AAAKdHicvVZbb9MwGM3GZV0YsAFv8GCoJnWsq5JymzQqTdoDPA6JXaQkmhzHac0cJ3IcttbKz+GVR/4Lj/wJnrGTDbreNECNq0qfv/PZx+fE0mc/oSQVlvV9YfHGzVu3l2rL5p2Vu/fur649OEzjjCN8gGIa82MfppgShg8EERQfJxzDyKf4yD/d0/jRZ8xTErOPop9gL4JdRkKCoFCpk7WlL6br4y5hUpDTQUKQyDjOHb0d+BQT1uFxxgLPdJNuGEHRS7GIIOKxdFHm4/Nc2vkUrD8DG+TSalmvJsFxGKqJxtvTYV/jL6fjSOOvp+OBxrcVHnB45mRUcAhEj7BmSCjt7KkTFs55oGE11W8DbG2Bzc3GVil6OGU1y2T/T2qkCPURxTt/S6Un5c6DGVS6aqjo36gmqhpj/x9VF65XZ+MI4fzNvI7CeVjqV+6pX7mpszXOw1VUuauocldna5yHq0HlrgaVuzpb43VdxSy40o5N82S1rhpmMcB4YF8E9d1669Hgx7uv+ydrC9/cIEZZhJlAFKapY1uJ8CTkgigS1fqyFCcQncIudlTIYIRTTxYPihysq0wAwpirPxOgyA6vkDBK037kq8qivY5iOjkRO78kGIf8aFLayUS47UnCkkxghsqjhRkFIgb6PQMCwjEStK8C1eGJUgdQD3KIhHr1XCHQjirdDJ+hOIogC567iHBlRuDYnnQ17Fw+pToNvUlLTzc8aYKh4bI4wE7agwnulOvLG3HWIwI39WVpEsYwB4q501aeg2KvDSDrdr6TqxMUHlAs5O9LlEufqlM+ta1cfWl79LuOB4ftlv2i1f5g13fbRjlqxmPjmdEwbOONsWu8N/aNAwPVVmrt2k7t7fJP84lZN9fL0sWFizUPjSvDbP0C1iAzRg==</latexit>
D (1) E (1)
D (1)
E (1) D (2)
D (3) E (3)
x z
(1)z
(2)z
(3)Q
Q
Q
E (2)
f(3) f(2) f(1)
p(z(2)|f(3))
p(z(1)|f(2))
p(x | f
(1))
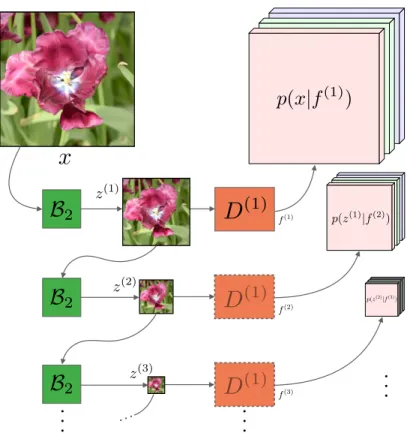
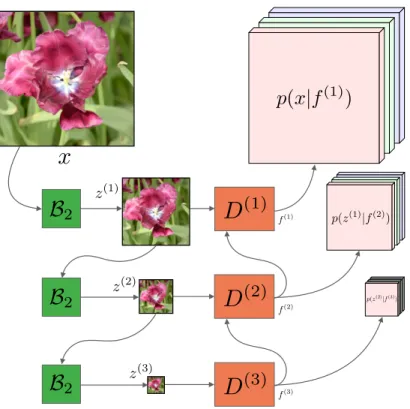
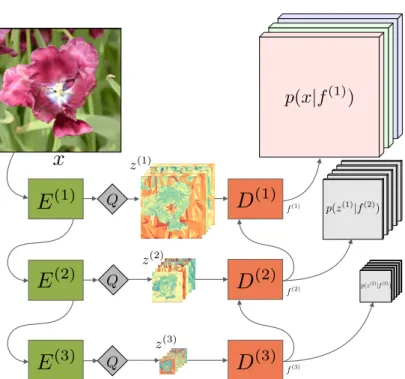
Figure 4.1: Overview of the architecture of L3C. The feature extractors
E
(s)compute quantized (by Q) auxiliary hierarchical feature representation
z
(1), . . . , z
(S)whose joint distribution with the image x, p(x, z
(1), . . . , z
(S)),
is modeled using the non-autoregressive predictors D
(s). The features f
(s)summarize the information up to scale s and are used to predict p for the next
scale.
4.2
M E T H O Dthe next scale, z
(S−1), and can thus decode them from the bitstream. Prediction and decoding is alternated until the arithmetic decoder obtains the image x.
In practice, we only need to use S = 3 feature extractors and predictors for our model, so when decoding we only need to perform three parallel (over pixels) forward passes in combination with the adaptive arithmetic coding.
The parallel nature of our model enables it to be orders of magnitude faster for decoding than autoregressive models, while learning enables us to obtain compression rates competitive with state-of-the-art engineered lossless codecs.
4.2 M E T H O D
The general lossless compression setting is described in Ch. 2. We describe the method specific details here.
4.2.1 Architecture
A high-level overview of the architecture is given in Fig. 4.1, while Fig. 4.2 shows a detailed description for one scale s. Unlike autoregressive models such as PixelCNN and PixelRNN, which factorize the image distribution autoregres- sively over sub-pixels x
tas p(x) = Q
Tt=1
p(x
t| x
t−1, . . . , x
1) , we jointy model all the sub-pixels and introduce a learned hierarchy of auxiliary feature repre- sentations z
(1), . . . , z
(S)to simplify the modeling task. We fix the dimensions of z
(s)to be C × H
0× W
0, where the number of channels C is a hyperparameter (C = 5 in our reported models), and H
0= H/2
s, W
0= W/2
sgiven a H × W - dimensional image.
5Specifically, we model the joint distribution of the image x and the feature representations z
(s)as
p(x, z
(1), . . . , z
(S)) = p(x | z
(1), . . . , z
(S))
S
Y
s=1
p(z
(s)| z
(s+1), . . . , z
(S))
where p(z
(S)) is a uniform distribution. The feature representations can be hand designed or learned. Specifically, on one side, we consider an RGB pyramid with z
(s)= B
2s(x), where B
2sis the bicubic (spatial) subsampling operator with subsampling factor 2
s. On the other side, we consider a learned represen- tation z
(s)= F
(s)(x) using a feature extractor F
(s). We use the hierarchical model shown in Fig. 4.1 using the composition F
(s)= Q ◦ E
(s)◦ · · · ◦ E
(1), where the E
(s)are feature extractor blocks and Q is a scalar differentiable
5 Considering that z
(s)is quantized, this choice conveniently upper bounds the information that
can be contained within each z
(s), however, other choices could be explored.
CTICALFULLRESOLUTIONLEARNEDLOSSLESSIMAGECOMPRESSION
Q
C E(s)in
Ein(s+1)
4Cf
s2f5
s1f1
s1f1 s1f1
E
(s)D
(s)f(s)
p(z(s 1)|f(s))
z(s)
U A⇤ ReLU
C(sp 1)
⇡,µ,
f(s+1)
f(s)
+ +
+ +
Figure 4.2: Architecture details for a single scale s. For s = 1, E
in(1)is the RGB image x normalized to [ − 1, 1]. All vertical black
lines are convolutions, which have C
f= 64 filters, except when denoted otherwise beneath. The convolutions are stride 1 with
3 × 3 filters, except when denoted otherwise above (using sSfF = stride s, filter f ). We add the features f
(s+1)from the predictor
D
(s+1)to those of the first layer of D
(s)(a skip connection between scales). The gray blocks are residual blocks, shown once
on the right side. C is the number of channels of z
(s), C
p(s−1)is the final number of channels, see Sec. 4.2.3. Special blocks
are denoted in red: U is pixelshuffling upsampling [90]. A ∗ is the “atrous convolution” layer described in Sec. 4.2.1. We use a
heatmap to visualize z
(s), see Sec. 4.D.
4.2
M E T H O Dquantization function (see Sec. 4.2.2). The D
(s)in Fig. 4.1 are predictor blocks, and we parametrize E
(s)and D
(s)as convolutional neural networks.
Letting z
(0)= x, we parametrize the conditional distributions for all s ∈ { 0, . . . , S } as
p(z
(s)| z
(s+1), . . . , z
(S)) = p(z
(s)| f
(s+1)),
using the predictor features f
(s)= D
(s)(f
(s+1), z
(s)).
6Note that f
(s+1)sum- marizes the information of z
(S), . . . , z
(s+1).
The predictor is based on the super-resolution architecture from EDSR [60], motivated by the fact that our prediction task is somewhat related to super- resolution in that both are dense prediction tasks involving spatial upsampling.
We mirror the predictor to obtain the feature extractor, and follow [60] in not using BatchNorm [38]. Inspired by the “atrous spatial pyramid pooling” from Chen et al. [16], we insert a similar layer at the end of D
(s), which we call
“ A ∗”. We use three atrous convolutions in parallel, with rates 1, 2, and 4, then concatenate the resulting feature maps to a 3C
f-dimensional feature map.
4.2.2 Quantization
We use a scalar quantization approach based on the vector quantization approach proposed by Agustsson et al. [1], to quantize the output of E
(s): Given levels L = { `
1, . . . , `
L} ⊂ R, we use nearest neighbor assignments to quantize each entry z
0∈ z
(s)as
z = Q(z
0) := arg min
jk z
0− `
jk , (4.1) but use differentiable “soft quantization”
Q(z ˜
0) =
L
X
j=1
`
jexp( − σ
qk z
0− `
jk ) P
Ll=1
exp( − σ
qk z
0− `
lk ) (4.2) to compute gradients for the backward pass, where σ
qis a hyperparameter relating to the “softness” of the quantization. For simplicity, we fix L to be L = 25 evenly spaced values in [ − 1, 1].
4.2.3 Mixture Model
For ease of notation, let z
(0)= x again. We model the conditional distribu- tions p(z
(s)| z
(s+1), . . . , z
(S)) using a generalization of the discretized logistic
6 The final predictor only sees z
(S), i.e., we let f
(S+1)= 0.
mixture model with K components proposed in [88], as it allows for efficient training: The alternative of predicting logits per (sub-)pixel has the downsides of requiring more memory, causing sparse gradients (we only get gradients for the logit corresponding to the ground-truth value), and does not model that neighbouring values in the domain of p should have similar probability.
Let c denote the channel and u, v the spatial location. For all scales, we assume the entries of z
cuv(s)to be independent across u, v , given f
(s+1). For RGB (s = 0), we define
p(x | f
(1)) = Y
u,v
p(x
1uv, x
2uv, x
3uv| f
(1)), (4.3) where we use a weak autoregression over RGB channels to define the joint probability distribution via a mixture p
m(dropping the indices uv for shorter notation):
p(x
1, x
2, x
3| f
(1)) = p
m(x
1| f
(1)) · p
m(x
2| f
(1), x
1) ·
p
m(x
3| f
(1), x
2, x
1). (4.4) We define p
mas a mixture of logistic distributions p
l(defined in Eq. (4.9) below). To this end, we obtain mixture weights
7π
kcuv, means µ
kcuv, variances σ
cuvk, as well as coefficients λ
kcuvfrom f
(1)(see further below), and get
p
m(x
1uv| f
(1)) = X
k
π
1uvkp
l(x
1uv| µ ˜
k1uv, σ
1uvk) p
m(x
2uv| f
(1), x
1uv) = X
k
π
2uvkp
l(x
2uv| µ ˜
k2uv, σ
2uvk) p
m(x
3uv| f
(1), x
1uv, x
2uv) = X
k
π
3uvkp
l(x
3uv| µ ˜
k3uv, σ
3uvk), (4.5) where we use the conditional dependency on previous x
cuvto obtain the updated means µ, as in [88, Sec. 2.2], ˜
˜
µ
k1uv= µ
k1uvµ ˜
k2uv= µ
k2uv+ λ
kαuvx
1uv˜
µ
k3uv= µ
k3uv+ λ
kβuvx
1uv+ λ
kγuvx
2uv. (4.6) Note that the autoregression over channels in Eq. (4.4) is only used to update the means µ to µ. ˜
7 Note that in contrast to [88] we do not share mixture weights π
kacross channels. This allows for
easier marginalization of Eq. (4.4).
4.2
M E T H O DFor the other scales ( s > 0 ), the formulation only changes in that we use no autoregression at all, i.e., µ ˜
cuv= µ
cuvfor all c, u, v. No conditioning on previous channels is needed, and Eqs. (4.3)-(4.5) simplify to
p(z
(s)| f
(s+1)) = Y
c,u,v
p
m(z
(s)cuv| f
(s+1)) (4.7) p
m(z
cuv(s)| f
(s+1)) = X
k
π
cuvkp
l(z
cuv| µ
kcuv, σ
cuvk). (4.8)
For all scales, the individual logistics p
lare given as p
l(z | µ, σ) = sigmoid((z + b/2 − µ)/σ) −
sigmoid((z − b/2 − µ)/σ)
. (4.9)
Here, b is the bin width of the quantization grid (b = 1 for s = 0 and b = 1/12 otherwise). The edge-cases z = 0 and z = 255 occurring for s = 0 are handled as described in [88, Sec. 2.1].
For all scales, we obtain the parameters of p(z
(s−1)| f
(s)) from f
(s)with a 1 × 1 convolution that has C
p(s−1)output channels (see Fig. 4.2). For RGB, this final feature map must contain the three parameters π, µ, σ for each of the 3 RGB channels and K mixtures, as well as λ
α, λ
β, λ
γfor every mixture, thus requiring C
p(0)= 3 · 3 · K + 3 · K channels. For s > 0 , C
p(s)= 3 · C · K , since no λ are needed. With the parameters, we can obtain p(z
(s)| f
(s+1)), which has dimensions 3 × H × W × 256 for RGB and C × H
0× W
0× L otherwise (visualized with cubes in Fig. 4.1).
We emphasize that in contrast to [88], our model is not autoregressive over pixels, i.e., z
cuv(s)are modelled as independent across u, v given f
(s+1)(also for z
(0)= x).
4.2.4 Loss
We are now ready to define the loss, which is a generalization of the discrete logistic mixture loss introduced in [88]. It is based on the cross-entropy intro- duced in Ch. 2 in Eq. 2.1. Instead of only having a single symbol stream s , we encode the image x and all representations z
(s)sequentially.
We minimize the expected bitcost of both x and z
(s)over samples,
[bpsp] Method Open Images DIV2K RAISE-1k
Ours L3C 2.991 3.094 2.387
Learned
Baselines RGB Shared 4.314 +44% 4.429 +43% 3.779 +58%
RGB 3.298 +10% 3.418 +10% 2.572 +7.8%
Non-Learned Approaches
PNG 4.005 +34% 4.235 +37% 3.556 +49%
JPEG2000 3.055 +2.1% 3.127 +1.1% 2.465 +3.3%
WebP 3.047 +1.9% 3.176 +2.7% 2.461 +3.1%
FLIF 2.867 −4.1% 2.911 −5.9% 2.084 −13%
Table 4.1: Compression performance of our method (L3C) and learned baselines (RGB Shared and RGB) to previous (non-learned) approaches, in bits per sub- pixel (bpsp). We emphasize the difference in percentage to our method for each other method in green if L3C outperforms the other method and in red otherwise.
w.r.t. the parameters of the feature extractor blocks E
(s)and predictor blocks D
(s). Specifically, given N training samples x
1, . . . , x
N, let F
i(s)= F
(s)(x
i) be the feature representation of the i -th sample. We minimize
L (E
(1), . . . , E
(S), D
(1), . . . , D
(S))
= −
N
X
i=1
log
p x
i, F
i(1), . . . , F
i(S)= −
N
X
i=1
log
p x
i| F
i(1), . . . , F
i(S)·
S
Y
s=1
p F
i(s)| F
i(s+1), . . . , F
i(S)= −
N
X
i=1
log p(x
i| F
i(1), . . . , F
i(S)) +
S
X
s=1
![Figure 4.2: Architecture details for a single scale s. For s = 1, E in (1) is the RGB image x normalized to [ − 1, 1]](https://thumb-eu.123doks.com/thumbv2/1library_info/3908759.1525975/32.1045.109.936.241.456/figure-architecture-details-single-scale-rgb-image-normalized.webp)