Vorlesungsskript
Integrierter Kurs III - spezielle Relativit¨atstheorie
Marcel Indlekofer, Thomas Lauermann, Vincent Peikert und Raphael Straub 6. Dezember 2004
2
Inhaltsverzeichnis
2 spezielle Relativit¨atstheorie 5
2.1 Einschub: Konzepte & Definitionen . . . . 5
2.1.1 (karthesische) Koordinaten . . . . 5
2.2 Newton’sche Mechanik . . . . 5
2.2.1 Galilei-Invarianz . . . . 5
2.2.2 Widerspruch zur Wellengleichung und zu den Maxwell-Gleichungen mit Galilei-Invarianz . . . . 7
2.3 Relativit¨atsprinzip & Lorentztransformation . . . . 8
2.3.1 Einstein’sches Relativit¨atsprinzip . . . . 8
2.3.2 Konstanz von c . . . . 8
2.3.3 Die spezielle Lorentz-Transformation . . . . 8
2.3.4 Elementare Folgerungen . . . . 10
2.3.4.1 Addition von Geschwindigkeiten . . . . 10
3
4 INHALTSVERZEICHNIS
Kapitel 2
spezielle Relativit¨ atstheorie
2.1 Einschub: Konzepte & Definitionen
2.1.1 (karthesische) Koordinaten
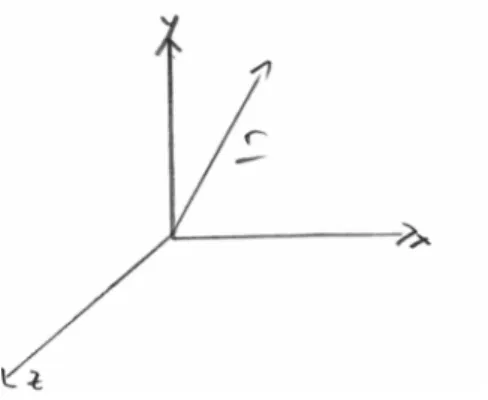
Abbildung 2.1: Raumkoordinaten
Jeder Punkt im Raum besitzt Raumkoordinaten (vgl. Abbildung 2.1):
r=
x y z
=
x1
x2 x3
Jeder Punkt in Raum und Zeit besitzt Raum-Zeit-Koordinaten:
x=
ct
x y z
:=
x0 x1 x2 x3
(2.1)
2.2 Newton’sche Mechanik
2.2.1 Galilei-Invarianz
Newton: ”Mechanische Vorg¨ange laufen in allen Inertialsystemen gleich ab.”
Galilei: ”Zwei Inertialsysteme sind durch eine Galilei-Transformation miteinander ver- kn¨upft.”
5
6 KAPITEL 2. SPEZIELLE RELATIVIT ¨ATSTHEORIE
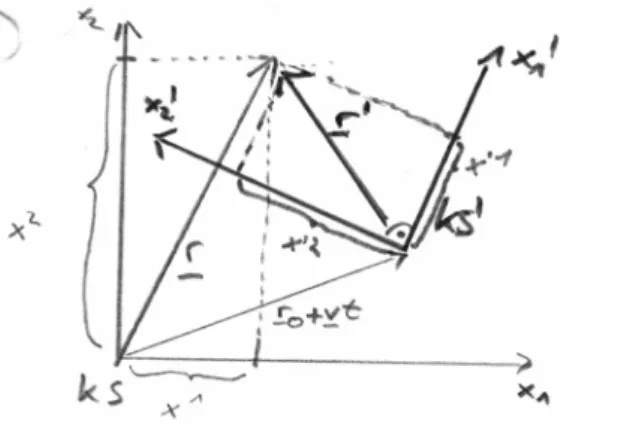
Abbildung 2.2: Galileitransformation
xi =
3
X
j=1
Rijx0i+ri0+vit (2.2)
Rij ist eine Drehmatrix.
Bemerkung:Die Indizes f¨ur Koordinatenxi stehen oben und werden mit den Indizes un- ten anRij summiert.Abk¨urzung:Im folgenden verwenden wir h¨aufig dieEinstein’sche Summenkonvention:
3,4
X
j=1
Rijx0j =Rijx0j (2.3)
doppelt auftauchende Indizes werden absummiert.
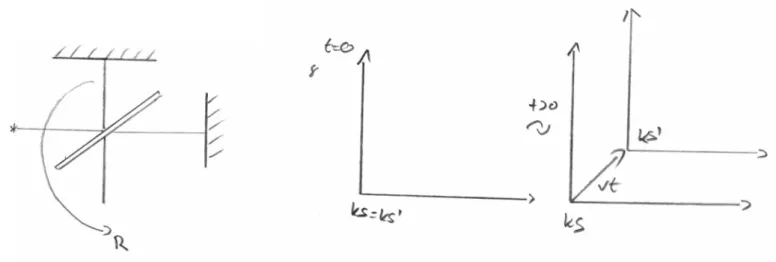
spezielle Galilei-Transformation:
xi =x0i+vit (2.4)
t =t0
Die spezielle Galilei-Transformation (Abbildung 2.3) ist eine Transformation auf ein
Abbildung 2.3: spezielle Galilei-Transformation
geradlinig bewegtes Bezugssystem.
2.2. NEWTON’SCHE MECHANIK 7
2.2.2 Widerspruch zur Wellengleichung und zu den Maxwell- Gleichungen mit Galilei-Invarianz
• A) Wellengleichung:
∇2− 1 c2∂t2
E(r,t) = 0
Die Wellengleichung ist eine Folge der Maxwell-Gleichungen im Vakuum mit der speziellen L¨osung:
E(r0,t) =E0cos(ωt−k·r)
f¨ur ω = ck. Die Galilei-Transformation auf ein mitbewegtes Inertialsystem (mit v =kkc) ergibt eine stehende Welle:
E(r0,t) =E0cos(ωt−k·r0− k2
k ct) =E0cos(k·r0) welche keine L¨osung der Wellengleichung ist.
Daraus folgern wir, dass sowhol die Wellengleichung als auch die Elektrodynamik nach Maxwell nicht Galilei-invariant sind. Dies ist der Ausgangspunkt der speziellen Relativit¨atstheorie.
• B) Versuch von Michelson-Morley
Man verwende ein Michelson-Intzerferometer und benutzt eine Rotation des Spek-
Abbildung 2.4: Michelson-Interferometer
trometers, um Unterschiede in der Lichtgeschwindigkeit entlang der Wege 1 und 2 zu messen, welche auf Grund der Bewegung der Erde zustande kommen.
Erwarten w¨urde man, dass die Interfernzmaxima N ≈ L1+Lλ 2 vc2
mit der Erdge- schwindigkeit v auf Grund des großen Vorfaktors L1+Lλ 2 messbar sind. Durch den Vorfaktor sind selbst feinste Unterschiede messbar. Im Versuch wird aber kein Unter- schied beobachtet, somit existiert keine Galilei-Transformation auf das Erdsystem.
Diese Beobachtung ist durch die Konstanz der Lichtgeschwindigkeit cim bewegten Koordinatensystem erkl¨arbar.
8 KAPITEL 2. SPEZIELLE RELATIVIT ¨ATSTHEORIE
2.3 Relativit¨ atsprinzip & Lorentztransformation
2.3.1 Einstein’sches Relativit¨atsprinzip
Die gesamten physikalischen Vorg¨ange laufen in allen Inertialsystemen gleich ab und zwei Inertialsysteme sind durch eine Lorentztransformation verkn¨upft.
2.3.2 Konstanz von c
Die Lichtgeschwindigkeit cim Vakuum ist unabh¨angig vom Inertialsystem und ¨andert sich also nicht bei Lorentz-Transformation.
2.3.3 Die spezielle Lorentz-Transformation
Abbildung 2.5: spezielle Lorentz-Transformation
Die Wellenfront einer Kugel-Lichtwelle, die vom Ursprung in zwei Inertialsysteme ausgeht, muss gleich sein.(vgl. Abb 2.5):
r2−c2t2 =r2 − x02
=r02−c2t02 =r02− x002
(2.5) Zur Vereinfachung w¨ahlt man:
x01 =x1 und x02 =x2
Licht, die Wellenfront einer elektromagnetischen Kugelwelle, breitet sich aus von einer Welle, die zum Zeitpunktt=t0 = 0 am Ortr=r0 = 0 war. Das zweite Koordinatensystem KS’ bewege sich mit v =vzˆDie Position der Wellenfront, der sogenannte Lichtkegel l¨asst sich mit folgender Formel beschreiben:
r2−c2t2 = (r0)2−(ct0)2 (2.6) Zur Vereinfachung nehmen wir Bewegung in z-Richtung an: x0 =x und y0 =y
z2−c2t2 = (z0)2−(ct0)2 ∗ (2.7) Wenn wir nun die Lichtgeschwindigkeit in allen Bezugssystemen als konstant postulieren, wie lautet dann die zugeh¨orige Koordiantentransformation(KT)? Wir postulieren weiter- hin:
• KT sei linear: λ1 ct1
z1
+λ2 ct2
z2
=λ1 ct01
z10
+λ2 ct02
z20
• KT sei homogen: t=z = 0 wird auf t0 =z0 = 0 abgebildet.
2.3. RELATIVIT ¨ATSPRINZIP & LORENTZTRANSFORMATION 9 Damit k¨onnen wir KT als Matrix Λ schreiben, die Matrix der Lorenzransformation ge- nannt wird und gegeben ist durch:
x0µ= Λµν ·xν (2.8)
als die Transformation von KS nach KS’ mit der Relativgeschwindigkeit v.
ct0 z0
=
a b f d
· ct
z
(2.9) also ist zum Beispiel Λ00 = a oder Λ03 = b. Dann lautet die R¨ucktransformation von KS’
nach KS:
ct z
= 1
ad−bf
d −b
−f a
· ct0
z0
(2.10) und beschreibt die Transformation mit der umgekehrten Relativgeschwindigkeit v0 =−v:
xµ = Λµν(−v)·x0ν (2.11)
Vergleich von Λ(v) und Λ(−v) und die Isotropieforderung ergibt:
det Λ =ad−bf = 1 sowie a=d (2.12)
Daraus folgt:
det Λ =a2−bf = 1 (2.13)
Sei nun b =vb und f =vf, ergibt sich in Gleichung ∗ eingesetzt:
z2−c2t2 = (vf ct+az)2−(act+vbz)2 = (a2−v2b2)z2 −(a2−v2f2) + 2avc(f −b)zt (2.14) Daraus folgt b =f und somit f¨allt der gemischte Term weg.
⇒ a2−v2b2 = 1 (2.15)
Damit k¨onnen wir nun einen Winkel ϕ einf¨uhren, so dass a = d = coshϕ und b = f = sinhϕ mit cosh2ϕ−sinh2ϕ = 1 gilt.
⇒Λµν(v) =
coshϕ sinhϕ sinhϕ coshϕ
= coshϕ
1 tanhϕ tanhϕ 1
(2.16) Ein winkel ϕparametrisiert die Lorentztransformation. Mitβ = tanhϕund γ = coshϕ =
√1
1−β2 erhalten wir:
Λµν(v) = γ·
1 β β 1
(2.17)
10 KAPITEL 2. SPEZIELLE RELATIVIT ¨ATSTHEORIE Abbildung 2.6: Plot der hyperbolischen Winkelfunktionen
wobei |β|<1 gelten muss.
Aus dem Vergleich mit den Galilei-Transformationen f¨ur v → 0 folgt: b → vb(0) und damit ist β(0) = 1c. Aus der Hintereinanderschaltung mehrerer Lorentztransformationen kann man zeigen, dass gilt:
β = v
c (2.18)
Damit ist ϕ = artanhvc und wir haben die speziellen Lorentztransformationen:
t0 = t+vzc2
q 1−vc22
(2.19) (2.20) sowie
z0 = z+vt q
1− vc22
(2.21)
welche bei v in die Galilei-Transformationen t0 =t und z0 =z+vt ¨ubergehen.
2.3.4 Elementare Folgerungen
2.3.4.1 Addition von Geschwindigkeiten
Begr¨undung: β ist linear in v, weil damit Hintereinanderschaltung zweier LT zu den Geschwindigkeiten u und v wieder eine spezielle LT mit der Geschwindigkeit w ergibt.
Hierbei bedienen wir uns einer Gruppeneigenschaft der Lorentztransformationen:
Abbildung 2.7: Wie groß ist w?
Λµν(u)·Λνκ(v) = Λµκ(w) (2.22)