3 Bewegungen und Kinematik
3.1 Einleitung und Grundbegriffe
In der Mechanik interessieren wir uns f¨ur Bewegungsabl¨aufe und Kr¨afte. Die Kr¨afte werden wir im n¨achsten Kapitel behandeln, ebenso wie Kr¨afte zu Bewegungen f¨uhren. Das wird das Thema der Dynamik sein. Im Moment beschr¨anken wir uns auf die Beschreibung von Bewegun- gen, die Kinematik. Diese Bewegungen k¨onnen sehr unterschiedlicher Natur sein. Das geht von der Futtersuche der Cataglyphis, ¨uber das Springen einer Heuschrecke, bis zur Bewegung von Elektronen in einem Teilchenbeschleuniger oder der Sonne um das Zentrum der Galaxis. Das faszinierende ist, dass alle diese Bewegungen den gleichen Gesetzm¨assigkeiten unterliegen. Bei allen fragen wir uns, wann ist das Ding dessen Bewegung wir beschreiben wo? Um diese Fragen zu beantworten und welche Gr¨ossen wir zur Beschreibung brauchen, gehen wir schrittweise vor.
Wir untersuchen zun¨achst, welches die minimalen Anforderungen sind, damit wir eine Bewe- gung vollst¨andig beschreiben k¨onnen. Der einfachste Fall den wir betrachten k¨onnen ist eine Bewegung die nur in einer Richtung stattfinden kann. Damit wollen wir beginnen.
3.2 Geradlinige Bewegung
Wir schr¨anken vorerst die beobachteten Bewegungen ein auf F¨alle, wo die Bewegung geradlinig ist, also nur in eine Richtung geht. Dies kann entlang der Horizontalen passieren wie bei einem Auto auf ebener Strasse, in der Vertikalen wie beim Fall oder entlang einer geneigten Ebene.
Die Ursache der Bewegung interessiert uns im Moment nicht. Ferner soll das sich bewegende Objekt als ein fester K¨orper bewegen und nicht rotieren, also entweder betrachten wir ein extrem kleines, nahezu punktf¨ormiges Teilchen oder ein ausgedehntes Objekt, bei dem alle Teile starr miteinander verbunden sind.
Wenn wir wissen wollen, wo ein Objekt zu einem bestimmten Zeitpunkt ist, es also lokalisieren wollen, m¨ussen wir die Position relativ zu einem Referenzpunkt feststellen. Das ist wie bei der Streckenmessung im letzten Kapitel, wo wir die L¨ange eines Stabes ¨uber die Messung zweier Positionen bestimmt haben. Diesen Referenzpunkt nennt man h¨aufig den Ursprung (origo: O) einer Achse, hier sagen wir diex−Achse:
O
- x
Die Position entlang dieser Achse, der Ort x, wird in Vielfachen eines Achsenabschnitts (z.
B. 1 cm) gemessen. In welcher Richtung sich das Objekt bewegt wird durch das Vorzeichen angegeben:
−4 −3 −2 −1 O 1 2 3 4 5 6 7
- +x [cm]
positive Richtung negative Richtung
Bewegt sich ein Objekt von einem Ortx1 zu einem anderem Ort x2, so ist die Ortsver¨anderung (Verschiebung):
∆x=x2−x1 (3.41)
Mit dem Symbol ∆ bezeichnen wir immer die ¨Anderung der entsprechenden Gr¨osse. Die Orts- ver¨anderung sollte nicht mit dem zur¨uckgelegtemWegverwechselt werden :
1 3 5 ∆x=−4 cm, Weg = 4 cm
1 3 -5
∆x= 2 cm, Weg = 6 cm
1 3 -5 ∆x= 4 cm, Weg = 4 cm
Bei der hier betrachteten geradlinigen Bewegung braucht es nur eine einfache Zahl, um den Ort anzugeben, eine Koordinate. Ebenfalls braucht es nur eine Zahl um die Ortsver¨anderung anzugeben. Es handelt sich um eine eindimensionale Bewegung. Es gibt einen Freiheitsgrad.
Man sagt hier auch, dass Ort und Ortsver¨anderung durch einen Skalargegeben sind.
Im n¨achsten Unter-Kapitel werden wir dann allgemeinere Bewegungen im Raum betrachten.
Dort braucht es im Allgemeinen drei Zahlen, um einen Ort anzugeben, die drei Koordinaten.
Die Ortsver¨anderung wird ebenfalls durch drei Zahlen (drei Koordinaten oderBetrag undRich- tung) angegeben. Im dreidimensionalen Raum ist die Ortsver¨anderung eine (dreidimensionale) Vektorgr¨osse.
Zur¨uck zu den geradlinigen Bewegungen: Eine kompakte Form geradlinige Bewegungen darzu- stellen, ist ein Diagramm, dasxals Funktion der Zeittdarstellt. Als Beispiel zeigt uns Abbildung 3.28 die H¨ohe ¨uber dem Boden, die das in Abbildung 3.29 gezeigte G¨urteltier w¨ahrend seines Sprungs erreicht.
Abbildung 3.28: Sprungh¨ohe ¨uber dem Bo- den x[m] in Funktion der Zeit t[s] f¨ur das springende G¨urteltier
Abbildung 3.29: Aufgeschrecktes G¨urteltier Das Diagramm in Abbildung 3.28 beschreibt nicht nur die Bewegung, sondern offenbart auch wie schnell sich das G¨urteltier bewegt. Mehrere physikalische Gr¨ossen sind mit der Aussage “wie schnell” assoziiert. Eine ist die mittlere Geschwindigkeit
v= ∆x
∆t = x2−x1 t2−t1
= Ortsver¨anderung
Zeitintervall (3.42)
Die mittlere Geschwindigkeit (velocity) entspricht der Steigung tanα der Geraden, die den An- fangspunkt x1(t1) mit dem Endpunkt x2(t2) des Intervalls verbindet. Auch v wird erst durch Betrag und Richtung bestimmt. Das Vorzeichen von v wird durch ∆x bestimmt, da bei einer Messung zu aufeinanderfolgenden Zeiten ∆timmer positiv ist.
Die mittlere Schnelligkeit
s= zur¨uckgelegter Weg
Zeitintervall (3.43)
ist eine weitere Art, wie die Phrase “wie schnell” ausgelegt werden kann. Im in Abbildung 3.28 eingezeichneten Weg des G¨urteltiers bis zum Maximum sind die Definitionen vonvundsgleich.
Wenn wir den R¨uckweg auch betrachten, ist dem nicht mehr so: dann ist v = 0 wegen ∆x = 0. Schliesslich landet das Tier am Startpunkt. Andererseits ist s f¨ur den Aufstieg und Fall gleich, einfach umgekehrt. “Wie schnell” kann aber auch bedeuten, wie schnell bewegt sich ein Objekt in einem bestimmten Zeitpunkt, was ist seine momentane Geschwindigkeit. Diese momentane Geschwindigkeit definieren wir als den Grenzwert der mittleren Geschwindigkeit, wenn das Zeitintervall immer kleiner wird.
v = (momentane) Geschwindigkeit = lim
∆t→0
∆x
∆t ≡ dx
dt (3.44)
Der Zusatz “momentan” wird in der Physik in der Regel weggelassen. Nennen wirx2 =x(t), t2 = tund x1 =x(t0), t1 =t0, dann ist die Geschwindigkeit zur Zeitt0 gegeben durch
v(t0) = lim
t→t0
x(t)−x(t0) t−t0 ≡ dx
dt|t=t0 (3.45)
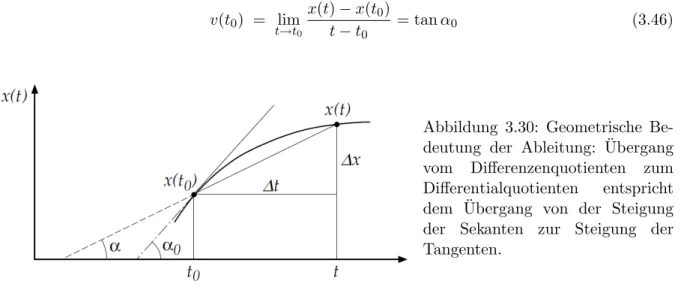
Mathematisch gesehen heisst dieser Grenzwert die Ableitung oder Differentiation der Funktion x(t) an der Stellet0. Das ist die Geschwindigkeitv(t0). Geometrisch entspricht die Ableitung der Steigung der Tangente an die Kurvex(t) im Punktt0(siehe Abbildung 3.30), statt der Steigung der Gerade zwischen t1 und t2:
v(t0) = lim
t→t0
x(t)−x(t0) t−t0
= tanα0 (3.46)
Abbildung 3.30: Geometrische Be- deutung der Ableitung: ¨Ubergang vom Differenzenquotienten zum Differentialquotienten entspricht dem ¨Ubergang von der Steigung der Sekanten zur Steigung der Tangenten.
F¨ur die Zeit-Ableitung werden auch alternativ die Bezeichnungen dx
dt, oder ˙x (3.47)
verwendet. Der Betrag der Geschwindigkeit ist die Schnelligkeit. F¨ur unser G¨urteltier (Abbildung 3.28) k¨onnen wir durch Messung der Steigung der Tangente die Geschwindigkeit ermitteln. Es ergibt sich die in Abbildung 3.31 dargestellte Geschwindigkeitskurve.
Wenn wir uns z.B. den Weg einer Cataglyphis anschauen, dann k¨onnen wir die Unterschiede in den verschiedenen Betrachtungsweisen von ”wie schnell”besser veranschaulichen. Einerseits
Abbildung 3.31: Geschwin- digkeit [m/s] (linke Skala) und Beschleunigung [m/s2] (rechte Skala) des G¨urtel- tiers (Abbildungen 3.28 und 3.29).
- t[s]
6 6
-2 2 v [m/s]
-10 10 a [m/s2]
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@@ 0.1
v(t)
a(t)
0.3 0.5 0.7
←
→
↓Max. H¨ohe
ist die Schnelligkeit und die Geschwindigkeit nicht dieselbe. Ebenso ¨andert sich der Wert der mittleren Geschwindigkeit je nachdem mit welcher Zeitaufl¨osung wir schauen und wir k¨onnen den Grenzwert f¨ur die momentan-Geschwindigkeit bestimmen. Bei der Cataglyphis m¨ussen wir ausserdem zwei Richtungen betrachten, da sich die Ameise in einer Ebene bewegt. Das werden wir im n¨achsten Kapitel eingehender behandeln.
Wenn ein Objekt seine Geschwindigkeit ¨andert, sprechen wir von Beschleunigung. Im t¨aglichen Leben bedeutet Beschleunigung normalerweise Geschwindigkeitszunahme, in der Physik enth¨alt dieser Begriff sowohl Zu- wie Abnahme, also auch das Abbremsen. Die mittlere Beschleunigung (acceleration) awird definiert als
a= v2−v1
t2−t1 = ∆v
∆t (3.48)
Analog zur Definition der momentanen Geschwindigkeit definieren wir als momentane Beschleu- nigung
a= dv
dt oder pr¨aziser a(t0) = lim
t→t0
v(t)−v(t0) t−t0
= dv
dt|t=t0 (3.49) Die Beschleunigung a(t) ist gegeben durch die Steigung der Tangente an die Kurve v(t).
3.2.1 Vertikaler Sprung oder Wurf
Bei dem G¨urteltier (Abbildung 3.31), das senkrecht nach oben springt, handelt es sich um eine eindimensionale Bewegung in vertikaler Richtung. Es bewegt sich zuerst nach oben, und dann wieder nach unten. Im Geschwindigkeitsdiagramm ist v(t) eine Gerade, d. h. die Steigung der Kurve ist konstant und negativ: a=−9.8 m/s2 (Gravitationsbeschleunigung auf der Erdober- fl¨ache). Die Geschwindigkeit ist zuerst positiv (nach oben) und dann negativ (nach unten).
Die Umkehroperation des Differenzierens ist das Integrieren. So wie man v(t) und a(t) durch Differenzieren von x(t) bzw. v(t) erh¨alt, kann man umgekehrt x(t) und v(t) durch Integrieren
von v(t) bzw.a(t) erhalten:
v(t) = Z t
t0
a(t0)dt0+v(t0) x(t) = Z t
t0
v(t0)dt0+x(t0) (3.50) v(t) ist eine Stammfunktion von a(t), x(t) ist eine Stammfunktion von v(t). Wir haben die Integrationsvariable t0 getauft, um sie von der oberen Grenze des Integralst zu unterscheiden.
F¨ur den Spezialfall konstanter Beschleunigung erhalten wir a(t) =a0 ⇒v(t) =
Z t t0
a0dt0+v(t0) =a0(t−to) +v(t0) (3.51) t0= 0, v(0) =v0 ⇒v(t) =a0t+v0 (3.52)
x(t) = Z t
t0
v(t0)dt0+x(t0) = Z t
t0
a0(t0−to)dt0+ Z t
t0
v(t0)dt0+x(t0) (3.53) x(t) = a0
2 (t−t0)2+v(t0)(t−t0) +x(t0) (3.54) t0= 0, v(0) =v0, x(0) =x0 ⇒x(t) = a0
2 t2+v0t+x0 (3.55) t0 = 0, v(0) = 0, x(0) = 0 ⇒t=√
2 s
x(t)
a0 (3.56)
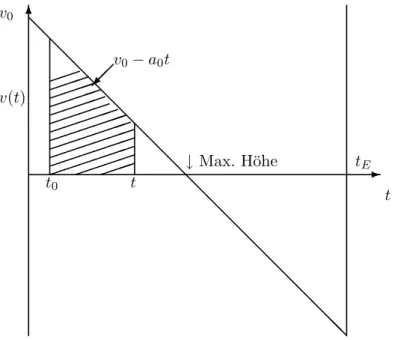
Die Skalenabh¨angigkeit dieser Beziehung haben wir im letzten Kapitel auch schon aus Dimensi- onsanalyse bestimmt, aber jetzt wissen wir was der relevante Vorfaktor ist! Wenn wir den Verlauf vonv(t) unda(t) gegen die Zeit auftragen, wie wir dies am Beispiel des G¨urteltiers in Abbildung 3.31 getan haben, dann l¨asst sich das Integral auch aus der graphischen Darstellung bestimmen.
Abbildung 3.32 zeigt, dass die Fl¨ache unter der Geschwindigkeitskurve dem zur¨uckgelegten Weg entspricht.
3.2.2 Experimentelles Beispiel
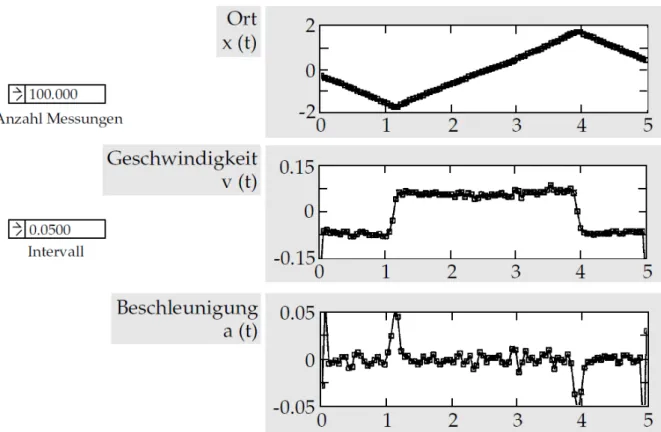
Zum Abschluss betrachten wir als Beispiel die Bewegung eines reibungsfrei gleitenden Reiters auf einer Luftkissenschiene (Abbildung 3.33). Im ersten Fall (Abbildung 3.34) l¨auft der Reiter ohne Beschleunigung (also mit konstanter Geschwindigkeit) bis zum Ende der Schiene, wo durch den Stoss mit der Begrenzung die Bewegungsrichtung und die Geschwindigkeit umgekehrt wird, der Reiter also kurz beschleunigt wird.
Im zweiten Fall (Abbildung 3.35) ist der Reiter an den beiden Enden mit einer d¨unnen Feder befestigt, so wird er immer mit einer Kraft zum Ausgangspunkt zur¨uckgezogen je weiter weg er geht. Die Bewegung des Reiters kann mit einer elektrischen Messvorrichtung registriert werden.
In festen Zeitabst¨anden wird die Position gemessen. Die beiden Abbildungen zeigen zwei solche Messungen. Durch Berechnen des Differenzenquotienten kann die Geschwindigkeit numerisch ermittelt werden, ebenso aus den Geschwindigkeitsdifferenzen die Beschleunigung.
Abbildung 3.32: Geschwin- digkeitsverlauf f¨ur eine kon- stante Beschleunigung. Die schraffierte Fl¨ache entspricht dem zwischen der Zeitt0und der Zeit t zur¨uckgelegten Weg. tE markiert das En- de der Bewegung, f¨ur das G¨urteltier aus Abbildung 3.28 die R¨uckkehr zum Bo- den. Da die Steig- und Fallh¨ohe gleich sind, ist die Fl¨ache der beiden Dreiecke oberhalb und unterhalb der Achse gleich.
- t 6
tE v(t)
v0
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@@ v0−a0t
t0 t
↓Max. H¨ohe
Abbildung 3.33: Luftkissenschiene.
Abbildung 3.34: Messprotokoll f¨ur den mit konstanter Schnelligkeit auf der Luftkissenschiene sich hin- und herbewegenden Reiter.
Im ersten Fall, ohne Beschleunigung erhalten wir experimentell die Beziehungen, die wir oben f¨ur den Spezialfall konstanter Beschleunigung behandelt haben. Jedenfalls ¨uberall, ausser an den Enden, wo sich die Bewegungsrichtung umkehrt und wir eine Beschleunigung haben m¨ussen.
¨uberall sonst ist a(t) = 0, v(t) = v0 auf dem Hinweg und v(t) = −v0 auf dem R¨uckweg. Das heisst, wir messen eine lineare Zunahme bzw. Abnahme des Ortes mit der Zeit f¨ur den Hin- bzw. R¨uckweg. Die Tatsache, dass der Reiter immer wieder die gleiche Strecke zwischen den beiden Enden zur¨ucklegt, macht seine Bewegung zu einerperiodischenBewegung, hier durch die S¨agezahnkurve repr¨asentiert.
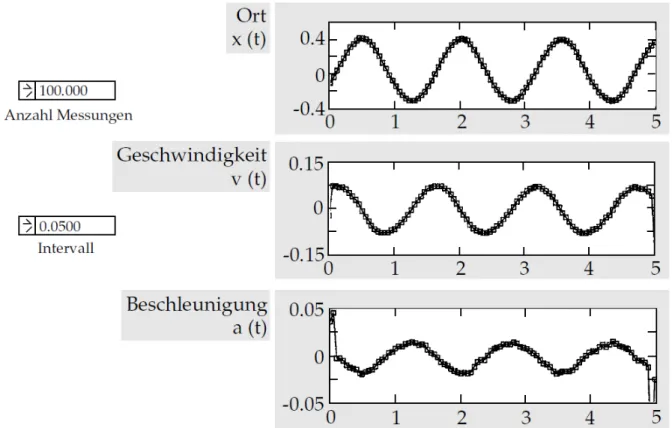
Die zweite Messung zeigt ebenfalls eine periodische Bewegung. Wir erkennen in der Kurve eine Sinus- bzw. Cosinusfunktion. Nennen wir die Zeit, die der Reiter f¨ur den Hin- und R¨uckweg braucht die PeriodeT, die maximale Distanz vom Zentrum der Schiene, die der Reiter erreicht A, dann k¨onnen wir die gemessene Kurve durch die folgende Funktion beschreiben:
x(t) =Acos(2π
T t) =Acos(ωt) ω≡ 2π
T (3.57)
Man ¨uberzeugt sich leicht, dassx=Aist f¨ur die Zeitent= 0,t=T und f¨ur alle weiteren Zeiten t=nT, mitn= ganze Zahl. Durch Differenzieren finden wir
v(t) = dx
dt =−2π
T Asin( 2π
T t) =−ωAsin(ωt) a(t) = dv
dt =−4π2
T2 Acos( 2π
T t) =−ω2Acos(ωt)
(3.58)
Diese Zusammenh¨ange werden durch die Messprotokolle best¨atigt. Die neu eingef¨uhrte Gr¨osse ω nennt man auch die Kreisfrequenz. Je g¨osser ω ist, desto gr¨osser ist die Amplitude der Ge- schwindigkeit und der Beschleunigung. Das haben wir experimentell auch gesehen. Interessant an diesem Fall ist vor allem, dass hier die Positionx(t) und die Beschleunigung a(t) die gleiche Zeitabh¨angigkeit haben und einander direkt proportional sind, also x(t) ∝ a(t). Das wird uns in Kapitel 4.3. noch eingehend besch¨aftigen, denn das beschreibt den Fall einer der Auslenkung proportionalen Kraft.
Abbildung 3.35: Messprotokoll f¨ur den sich periodisch an eine Feder gekoppelt hin- und herbe- wegenden Reiter auf der Luftkissenschiene.
3.3 Bewegung in zwei und drei Dimensionen
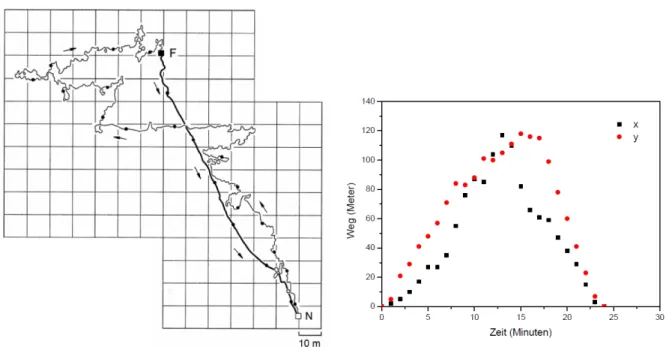
Die Bewegungen, die wir beschreiben wollen beschr¨anken sich aber bei Weitem nicht nur auf einfache eindimensionale F¨alle. Wir haben in der Einleitung schon das Beispiel der Cataglyphis und ihrer Bewegungen kennengelernt. Diese finden in einer Ebene der W¨uste statt und damit in zwei Dimensionen. Dazu reicht es nicht mehr wenn wir nur die Zeitabh¨angikeit der Position einer Richtung betrachten. Wie in Fig. 3.37 gezeigt, k¨onnen wir die Bewegung mit Hilfe von zwei Abh¨angigkeiten beschreiben. Das heisst, der Ort der Ameise wird durch einen zweidimensionalen Vektor beschrieben.
Auch das G¨urteltier wird genauer betrachtet nicht direkt in die H¨ohe springen, sondern sich in der Ebene auch noch ein wenig bewegen. Also brauchen wir f¨ur solche Bewegungen eigentlich
Abbildung 3.36: Der Weg einer Cataglyphis auf der Futtersuche. Zugeh¨origes Weg-Zeit Dia- gramm.
sogar drei Richtungen (oder Koordinaten) die wir beschreiben werden. Anders ausgedr¨uckt, der Ort im Allgemeinen wird in unserer Beschreibung ein dreidimensionaler Vektor sein.
3.3.1 Vektoren
Wie wir bei der Beschreibung der Bewegung der Cataglyphis gesehen haben, m¨ussen wir die Ebene in zwei Koordinaten unterteilen. Sehr oft sind das zwei Richtungen, die senkrecht aufein- ander stehen. Dann spricht man von kartesischen Koordinaten (nach Rene ¨ıch denke also bin ich”Descartes). Da die beiden Richtungen senkrecht aufeinander stehen, ist eine Bewegung in die eine Richtung nie auch eine Bewegung in die andere. Darum k¨onnen wir die Bewegung auch einfach als das Paar der Bewegungen beschreiben. Dieses Paar, zusammengefasst in eine Gr¨osse ist der Vektor der Bewegung. Die einzelnen Richtungen sind die Komponenten des Vektors.
Wenn man alle Komponenten zusammennimmt und jeweils in ihre Richtung gehen l¨asst erh¨alt man die Gesamtrichtung des Vektors sowie seinen Betrag. Wenn ich je einen Schritt nach rechts und nach vorne gehe habe ich mich diagonal nach vorne rechts bewegt und zwar eine Distanz von √
2 Schritten.
Wir schreiben den Vektor als Summe seiner Komponenten (im zweidimensionalen Fallx, y und den kartesischen Einheitsvektoren~e1, ~e2:
~
r=x ~e1+y ~e2 (3.59)
Hier ist die L¨ange des Vektors gegeben durch
|~r|=p
x2+y2 (3.60)
und die Richtung durch
tanθ= y
x (3.61)
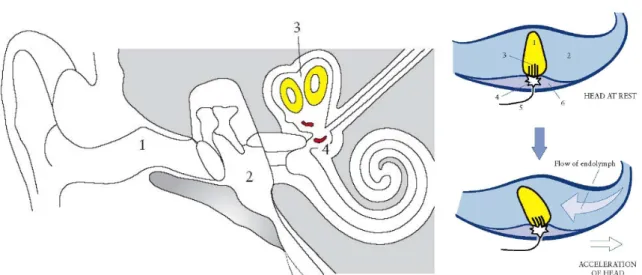
Abbildung 3.37: Der Beschleunigungsmesser im Mittelohr. Die drei ineinander verschlunge- nen R¨ohren des Vestibular-Organs messen die drei Komponenten der Beschleunigung ¨uber die Tr¨agheit des Endolymphs.
Da wir uns in einer dreidimensionalen Welt bewegen, m¨ussen wir um unseren Bewegungszu- stand zu bestimmen auch drei Komponenten der Beschleunigung messen, also die Kompo- nenten ax, ay, az. Dies geschieht beim Menschen im Innenohr, mit einer Kombination aus drei Kreisf¨ormig geformten R¨ohren, dem Vestibularorgan. Diese drei Vestibulen stehen jeweils senk- recht aufeinander und bilden so die Basis zur Messung der drei Komponenten der Beschleuni- gung, die auf unseren Kopf wirkt. Was passiert ist, dass bei einer Beschleunigung des Kopfes die Fl¨ussigkeit in den Vestibulen, der Endolymph, zu fliessen beginnt. Wir werden im n¨achsten Kapitel sehen woher das kommt. Die Tr¨agheit der Fl¨ussigkeit f¨uhrt dazu, dass sie der Beschleu- nigung des Kopfes nicht direkt folgt. Der so induzierte Fluss bewirkt dann eine Kraft auf die Capulae, die unten in den R¨ohren befestigt sind. Diese Capulae sind mit Neuronen verbunden, die das Signal der Messung weitergeben.
3.3.2 Differenzieren des Orts- und Geschwindigkeitsvektors
Wie gesagt, werden im dreidimensionalen Raum Ort, Geschwindigkeit und Beschleunigung als Vektoren dargestellt. Um wie oben diskutiert die Bewegung zu beschreiben, m¨ussen wir also den Ortsvektor ableiten. Dabei stellt sich die Frage:
Wie leitet man einen Vektor ab?
Vektoren sind ja eine spezielle Art von mehrwertigen Funktionen von mehreren Variablen. Hier betrachten wir Vektorfelder im engeren Sinne als eine dreiwertige Funktion ~r(x, y, z) die an
jedem Punkt im dreidimensionalen Raum definiert ist. Der Vektor soll ausserdem sich im Laufe der Zeit ¨andern k¨onnen, es ist also
~
r=~r(x, y, z, t) (3.62)
Wir hatten ja oben den Vektor als Summe seiner Komponentenrx, ry, rz und den kartesischen Einheitsvektoren~e1, ~e2, ~e3 geschrieben:
~
r=rx~e1+ry~e2+rz~e3 (3.63) Auf diese Formel k¨onnen wir die Summen- und Produkteregel anwenden. Wir nehmen ausserdem an, dass die Einheitsvektoren fest im Raum stehen und sich nicht bewegen. Dann werden nur noch die Komponenten nach der Zeit abgeleitet und somit
∂~r
∂t = ∂rx
∂t ~e1+∂ry
∂t ~e2+∂rz
∂t ~e3 (3.64)
Wir schreiben partielle Ableitungen, weil der Vektor und damit die Komponenten ja nicht nur von der Zeit, sondern auch vom Ort abh¨angen k¨onnen.
Als spezielles Beispiel betrachten wir den Ortsvektor und seine Ableitungen:
Bewegt sich ein Teilchen entlang einer beliebig verlaufenden Bahn im Raum, so markieren wir seine Position relativ zu einem Referenzpunkt durch den Ortsvektor~r. Ein Beispiel daf¨ur stellt auch der Pfad der Cataglyphis in Fig. 3.37 dar. Idealisiert haben wir einen kurzen Abschnitt einer solchen Kurve nocheinmal in Fig. 3.3.2 gezeigt.
~
r enth¨alt die Information ¨uber den Abstand zum Refe- renzpunkt: OA ≡ |~r| = L¨ange des Ortsvektors und die Richtung im Raum. ~r ist zeitabh¨angig.
Der Ortsvektor ist also zeitabh¨angig:
~r(t) =x(t)~e1+y(t)~e2+z(t)~e3 (3.65) Die Ableitung nach der Zeit des Ortsvektors ergibt die Geschwindigkeit~v, zweimaliges Ableiten die Beschleunigung~a:
~
v(t) = d~r(t)
dt = dx(t)
dt ~e1+dy(t)
dt ~e2+dz(t)
dt ~e3 (3.66)
~a(t) = d2~r(t)
dt2 = d2x(t)
dt2 ~e1+d2y(t)
dt2 ~e2+d2z(t)
dt2 ~e3 (3.67)
Wir d¨urfen hier normale Ableitungen schreiben, da die Gr¨ossen jetzt alle nur von der Zeit abh¨angen!
3.3.3 Beispiele: Schuss, Sprung und Wurf
In diesem Abschnitt betrachten wir die Bewegung eines Objekts w¨ahrend eines freien Falls. In vertikaler Richtung haben wir die Situation schon beschrieben und das Objekt wird durch die Anziehungskraft der Erde konstant nach unten beschleunigt, in horizontaler Richtung ist die Beschleunigung null w¨ahrend des Flugs oder des Falls, weil wir vom Luftwiderstand absehen wollen.
ay =−g ax= 0 (3.68)
Am Anfang der Bewegung hat das Objekt die Geschwindigkeit
~v0 mit den Komponenten
vx =v0cosθ0 undvy =v0sinθ0 (3.69)
Die Starth¨ohe zur Zeit t = 0 sei y0. Der Einfachheit halber w¨ahlen wir den Ursprung der x−Achse am Startort: x0 = 0. Durch Anwendung der Formeln f¨ur die geradlinige Bewegung und den Spezialfall konstanter Beschleunigung erhalten wir:
vy =v0sinθ0−gt y=yo+v0tsinθ0−g
2t2 (3.70)
vx =v0cosθ0 x=v0tcosθ0 (3.71) Die Gleichung der Bahnkurve, dieWurfparabel, die die Flugh¨oheyals Funktion der Flugdistanz x angibt erh¨alt man aus den obigen Beziehungen durch Eliminieren der Zeit:
y=y0+ tanθ0x− g 2v20cos2θ0
x2 (3.72)
Die maximale H¨ohe erreicht das Objekt, wenn vy = 0 gilt, also zur Zeitt=v0sinθ0/g:
ymax−y0 = v02sin2θ0
2g (3.73)
Da Steigzeit und Fallzeit gleich sind, erreicht das Objekt seine Ausgangsh¨ohe wieder zur Zeit t= 2v0sinθ0/g und erreicht dort eine Weite:
xmax = 2v20sinθ0cosθ0
g = v02sin 2θ0
g (3.74)
Aus der obigen Formel schliesst man, dass die Weite am gr¨ossten wird, wenn der Abflugwinkel θ0= 45◦ betr¨agt, und dass man die gleiche Weite erreicht, wennθ0 =α/2 bzw. θ0= 90◦−α/2 gew¨ahlt wird.
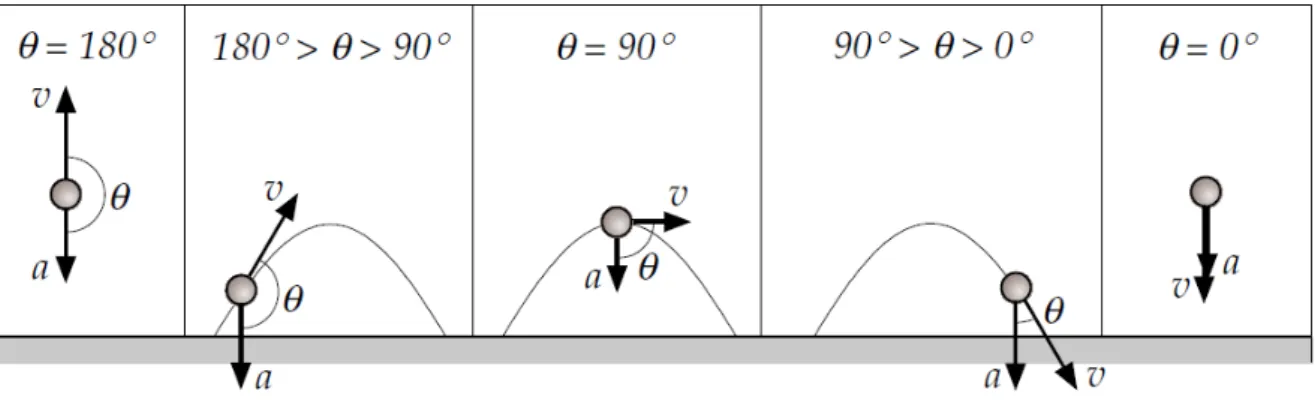
Abbildung 3.38 zeigt uns den Geschwindigkeits- und den Beschleunigungsvektor an verschiede- nen Stellen der Bahnkurve. W¨ahrend~aimmer die gleiche Richtung und Gr¨osse hat, ¨andert sich die Richtung und Gr¨osse von~vkontinuierlich. Die Komponentevx ist konstant, die Komponente vy ¨andert w¨ahrend des Fluges ihr Vorzeichen.
Abbildung 3.38: Richtung und Gr¨osse des Geschwindigkeits- und des Beschleunigungsvektors an verschiedenen Punkten der Flugbahn.
Beispiel: das G¨urteltier: Das photographierte Tier von Abbildung 3.29 erreicht nach 0.2 s eine H¨ohe von 0.544 m. Wie lange ist es in der Luft und welche maximale H¨ohe erreicht es ? Wir nehmen an, das Tier springt senkrecht nach oben (θ0 = 90◦). Dann k¨onnen wir aus y = v0t− g2t2 mit den gegebenen Zahlen v0 = 3.70 m/s ermitteln (g = 9.81 m/s2). Bei einer Zeit von t = v0/g = 0.377 s erreicht das Tier seine maximale H¨ohe von v02/(2g) = 0.698 m. Diese Befunde sind in der graphischen Darstellung von Abbildung 3.28 enthalten.
Die parabolische Form der Wurfparabel wird auch dazu verwendet um Schwerelosigkeit ¨uber einen nicht allzu kurzen Zeitraum zu simulieren. Im freien Fall ist man schwerelos. Das heisst es wirkt nur die Erdanziehung auf einen. Wir werden im n¨achsten Kapitel genauer sehen was das heisst. Wenn man sich also in ein Flugzeug begibt und damit die Flugbahn einer Parabel fliegt, dann wirkt auf alle Insassen nur noch die Schwerkraft, da sie sich auf der gleichen Kurve wie ein frei fallendes Objekt befinden. In dieser Situation kann man dann w¨ahrend so etwa 20 Sekunden Experimente in der Schwerelosigkeit ausf¨uhren.
3.4 Bewegung entlang einer Kreisbahn
Ein h¨aufig in der Natur auftretender Spezialfall einer ebenen, zweidimensionalen Bewegung ist der, wo sich das Objekt auf einer Kreisbahn bewegt, denken wir z. B. an die Planetenbah-
nen, die meistens in guter N¨aherung Kreise sind, das Verhalten von Fahrzeugen in Kurven, die von Skifahrern durchfahrenen Mulden oder ¨uberfahrenen Kuppen, und ¨ahnliches mehr. Die Kreisbahn ist auch deshalb interessant, weil die beschriebenen Situationen, auch wenn sie keine ideale Kreisbahn sind, doch sehr gut (mindestens lokal) durch eine Kreisbahn angen¨ahert werden k¨onnen.
Eine Kreisbahn ist definiert durch den Ortsvektor~r, mit dem Ursprung des Koordinatensystems im Zentrum des Kreises und einem konstanten Abstand (dem Radius des Kreises). Es gilt:
r=|~r(t)|= konst (3.75)
Aber ~r(t) ist nat¨urlich nicht konstant, der Ortsvektor dreht sich im Kreise herum, er ¨andert st¨andig seine Richtung. Ebenso~v(t) =d~r/dt.
Ein interessanter Spezialfall der Kreisbewegung ist der wenn die Schnelligkeit konstant ist, d.h.
der Geschwindigkeitsvektor ist immer gleich lang (auch wenn er seine Richtung ¨andert).
3.4.1 Konstante Schnelligkeit
Konstante Schnelligkeit bedeutet |~v|=v= const., d. h. der Betrag der Geschwindigkeit ¨andert sich nicht, nur deren Richtung.
Wir berechnen vorerst
~r·~r=r2 = konst ⇒ dr2
dt = 0 (3.76)
Aber es gilt auch die Produkteregel:
0 = dr2 dt = d~r
dt ·~r+~r·d~r
dt = 2~v·~r (3.77)
Dabei bedeuten die Punkte immer das Skalarprodukt. Damit haben wir bewiesen, das ~v ⊥~r, wie in der Skizze dargestellt: Die Richtung der Geschwindigkeit ist identisch mit der Richtung der Tangente an die Bahn, an den Kreis mit Radius r.
r(t) v(t)
Wie gross ist die Beschleunigung~a=d~v/dt? Wir betrachten vorerst den Fall, wo der Betrag der Geschwindigkeit konstant ist, also
v=|~v(t)|= konst (3.78)
und wenden den analogen Trick wie oben an:
~v·~v=v2= konst ⇒ dv2
dt = 0 (3.79)
und wieder nach der Produkteregel 0 = dv2
dt = d~v
dt ·~v+~v·d~v
dt = 2~a·~v (3.80)
Offenbar gilt ~a ⊥ ~v. Da wir uns in der Ebene bewegen muss demnach ~a und ~r parallel oder antiparallel sein. Wie wir gerade gesene haben gilt: ~v·~r = 0. Damit gilt auch 0 = d(~v·~dtr) und nach der Produktregel
0 = d(~v·~r) dt = d~v
dt ·~r+~v·d~r
dt =~a·~r+v2 (3.81) Dividieren durchr und Umsortieren ergibt
~a·~r
r =−v2
r (3.82)
Das Skalarprodukt~a·~rr gibt die Komponente von~ain Richtung~r an. Die Beschleunigung zeigt also gegen den Mittelpunkt des Kreises (!), man nennt sie auch Zentripetalbeschleunigung. Sie hat den BetragaN =v2/r.
v(t)
a(t)
Diese Beschleunigung heisst auch Zentripetalbeschleunigung. Der Index N deutet an, dass die Richtung der Zentripetalbeschleunigung senkrecht (normal) zur Bahn ist.
Die Komponente der Beschleunigung parallel zur Bahn heisst dieTangentialkomponenteaT. F¨ur die Kreisbahn mit konstanter Schnelligkeit gilt
aT = 0 (3.83)
da sich die Schnelligkeit, sprich die Geschwindigkeit entlang der Bahn ja nicht ¨andert.
![Abbildung 3.28: Sprungh¨ ohe ¨ uber dem Bo- Bo-den x [m] in Funktion der Zeit t [s] f¨ ur das springende G¨ urteltier](https://thumb-eu.123doks.com/thumbv2/1library_info/4346382.1574419/3.892.448.780.331.780/abbildung-sprungh-ohe-uber-funktion-zeit-springende-urteltier.webp)
![Abbildung 3.31: Geschwin- Geschwin-digkeit [m/s] (linke Skala) und Beschleunigung [m/s 2 ] (rechte Skala) des G¨ urtel-tiers (Abbildungen 3.28 und 3.29)](https://thumb-eu.123doks.com/thumbv2/1library_info/4346382.1574419/5.892.375.805.158.502/abbildung-geschwin-geschwin-digkeit-skala-beschleunigung-rechte-abbildungen.webp)