Universit¨ at Regensburg Mathematik
A stable and linear time discretization for a thermodynamically consistent model for two-phase incompressible flow
Harald Garcke, Michael Hinze and Christian Kahle
Preprint Nr. 03/2014
A stable and linear time discretization for a thermodynamically consistent model for two-phase
incompressible ow ∗
Harald Garcke
†, Michael Hinze
‡, Christian Kahle
§February 26, 2014
Abstract
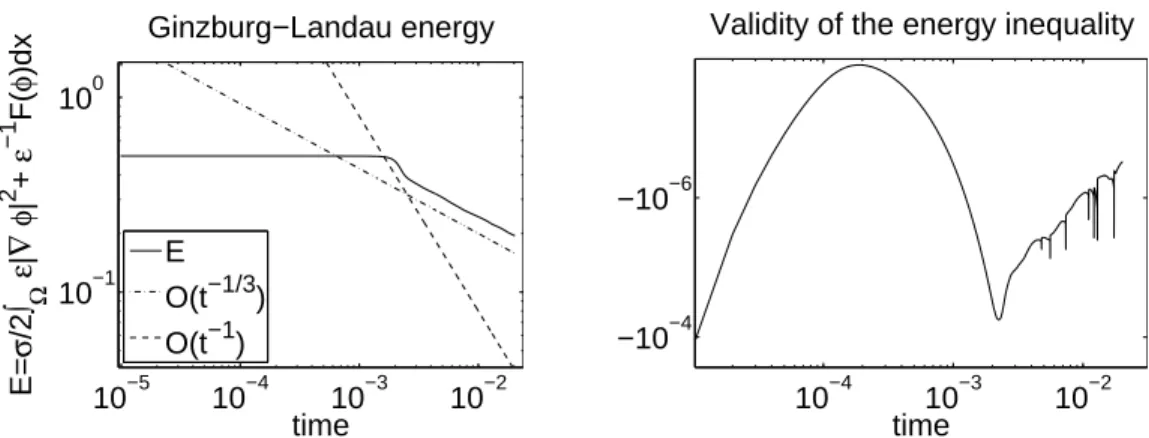
A new time discretization scheme for the numerical simulation of two-phase ow governed by a thermodynamically consistent diuse interface model is pre- sented. The scheme is consistent in the sense that it allows for a discrete in time energy inequality. An adaptive spatial discretization is proposed that conserves the energy inequality in the fully discrete setting by applying a suitable post pro- cessing step to the adaptive cycle. For the fully discrete scheme a quasi-reliable error estimator is derived which estimates the error both of the ow velocity, and of the phase eld. The validity of the energy inequality in the fully discrete setting is numerically investigated.
∗The authors gratefully acknowledge the nancial support by the Deutsche Forschungsgemeinschaft through the priority program SPP1506 entitled Transport processes at uidic interfaces.
†Fakultät für Mathematik, Universität Regensburg, 93040 Regensburg.
‡Fachbereich Mathematik, Universität Hamburg, Bundesstraÿe 55, 20146 Hamburg.
§Fachbereich Mathematik, Universität Hamburg, Bundesstraÿe 55, 20146 Hamburg.
Introduction
In the present work we propose a stable and (essentially) linear time discretization scheme for two-phase ows governed by the diuse interface model
ρ∂tv+ ((ρv+J)· ∇)v−div(2ηDv) +∇p=µ∇ϕ+ρg ∀x∈Ω, ∀t∈I, (1) div(v) =0 ∀x∈Ω, ∀t∈I, (2)
∂tϕ+v· ∇ϕ−div(m∇µ) =0 ∀x∈Ω, ∀t∈I, (3)
−σ∆ϕ+F0(ϕ)−µ=0 ∀x∈Ω, ∀t∈I, (4) v(0, x) =v0(x) ∀x∈Ω, (5) ϕ(0, x) =ϕ0(x) ∀x∈Ω, (6) v(t, x) =0 ∀x∈∂Ω,∀t ∈I, (7)
∇µ(t, x)·νΩ =∇ϕ(t, x)·νΩ =0 ∀x∈∂Ω,∀t ∈I, (8) where J = −dϕdρm∇µ. This model is proposed in [AGG12]. Here Ω⊂ Rn, n ∈ {2,3}, denotes an open and bounded domain, I = (0, T] with 0 < T < ∞ a time interval, ϕ denotes the phase eld, µ the chemical potential, v the volume averaged velocity, p the pressure, and ρ = ρ(ϕ) = 12((ρ2−ρ1)ϕ+ (ρ1+ρ2)) the mean density, where 0 < ρ1 ≤ ρ2 denote the densities of the involved uids. The viscosity is denoted by η and can be chosen arbitrarily, fullling η(−1) = ˜η1 and η(1) = ˜η2, with individual uid viscosities η1, η2. The mobility is denoted by m = m(ϕ). The graviational force is denoted by g. By Dv = 12(∇v+ (∇v)t) we denote the symmetrized gradient. The scaled surface tension is denoted by σ and the interfacial width is proportional to . The free energy is denoted by F. For F we use a splitting F =F++F−, where F+ is convex andF− is concave.
The above model couples the NavierStokes equations (1)(2) to the CahnHilliard model (3)(4) in a thermodynamically consistent way, i.e. a free energy inequality holds. It is the main goal to introduce and analyze an (essentially) linear time dis- cretization scheme for the numerical treatment of (1)(8), which also on the discrete level fullls the free energy inequality. This in conclusion leads to a stable scheme that is thermodynamically consistent on the discrete level.
Existence of weak solutions to system (1)(8) for a specic class of free energies F is shown in [ADG13a, ADG13b]. See also the work [Grü13], where the existence of weak solutions for a dierent class of free energies F is shown by passing to the limit in a numerical scheme. We refer to [LT98], [Boy02], [DSS07], [ADGK13], and the review [AMW98] for other diuse interface models for two-phase incompressible ow.
Numerical approaches for dierent variants of the NavierStokes CahnHilliard system have been studied in [KSW08], [Fen06], [Boy02], [AV12], [Grü13], [HHK13], [GK14] and [GLL].
This work is organized as follows. In Section 1 we derive a weak formulation of (1)(8) and formulate a time discretization scheme. In Section 2 we derive the fully discrete model and show the existence of solutions for both the time discrete, and the
fully discrete model, as well as energy inequalities, both for the time discrete model, and for the fully discrete model. In Section 3 we use the energy inequality to derive a residual based adaptive concept, and in Section 4 we numerically investigate properties of our simulation scheme.
Notation and assumptions
LetΩ⊂Rn,n∈ {2,3}denote a bounded domain with boundary∂Ωand outer normal νΩ. Let I = (0, T) denote a time interval.
We use the conventional notation for Sobolev and Hilbert Spaces, see e.g. [AF03].
With Lp(Ω), 1 ≤ p ≤ ∞, we denote the space of measurable functions on Ω, whose modulus to the powerpis Lebesgue-integrable. L∞(Ω)denotes the space of measurable functions onΩ, which are essentially bounded. Forp= 2we denote by L2(Ω)the space of square integrable functions onΩwith inner product(·,·)and normk · k. For a subset D ⊂Ω and functions f, g ∈ L2(Ω) we by (f, g)D denote the inner product of f and g restricted to D, and by kfkD the respective norm. By Wk,p(Ω), k ≥ 1,1 ≤ p ≤ ∞, we denote the Sobolev space of functions admitting weak derivatives up to order k in Lp(Ω). If p = 2 we write Hk(Ω). The subset H01(Ω) denotes H1(Ω) functions with vanishing boundary trace.
We further set
L20(Ω) ={v ∈L2(Ω)|(v,1) = 0}, and with
H(div,Ω) ={v ∈H01(Ω)n|(div(v), q) = 0∀q∈L2(0)(Ω)}
we denote the space of all weakly solenoidal H01(Ω) vector elds.
Foru∈Lq(Ω)n,q > n, and v, w∈H1(Ω)n we introduce the trilinear form a(u, v, w) = 1
2 Z
Ω
((u· ∇)v)w dx− 1 2
Z
Ω
((u· ∇)w)v dx. (9) Note that there holds a(u, v, w) =−a(u, w, v), and especially a(u, v, v) = 0.
For the data of our problem we assume:
A1 There exists constants ρ ≥ ρ > 0, η ≥ η > 0, and m ≥ m > 0 such that the following relations are satised:
• ρ≥ρ(ϕ)≥ρ >0,
• η≥η(ϕ)≥η >0,
• m≥m(ϕ)≥m >0.
Especially we assume that the mobility is non degenerated. In addition we assume, that ρ,µ, and m are continuous.
A2 F :R→R is continuously dierentiable.
A3 F and the derivativesF+0 andF−0 are polynomially bounded, i.e. there existsC > 0 such that|F(x)| ≤C(1+|x|q),|F+0(x)| ≤C(1+|x|q−1)and|F−0(x)| ≤C(1+|x|q−1) holds for some q ∈[1,4] if n= 3 and q∈[1,∞) if n = 2,
A4 F+0 is Newton (sometimes called slantly) dierentiable (see e.g. [HIK03]) regarded as nonlinear operator F+0 :H1(Ω)→(H1(Ω))∗ with Newton derivative G satisfy- ing
(G(ϕ)δϕ, δϕ)≥0 for each ϕ∈H1(Ω) and δϕ∈H1(Ω).
To ensure Assumption A1 we introduce a cut-o mechanism to ensure the bounds onρ dened in Assumption A1 independently of ϕ. Note that η(ϕ) and m(ϕ) can be chosen arbitrarily fullling the stated bounds. We dene the mass density as a smooth, monotone and strictly positive functionρ(ϕ)fullling
ρ(ϕ) =
˜ ρ2−˜ρ1
2 ϕ+ρ˜1+ ˜2ρ2 if −1−ρ˜ρ˜1
2−˜ρ1 < ϕ <1 + ρ˜ρ˜1
2−˜ρ1, const if ϕ >1 + ρ˜2 ˜ρ1
2−˜ρ1, const if ϕ <−1− ρ˜2 ˜ρ1
2−˜ρ1. For a discussion we refer to [Grü13, Remark 2.1].
Remark 1. The Assumptions A2A4 are for example fullled by the polynomial free energy
Fpoly(ϕ) = σ
4 1−ϕ22
.
Another free energy fullling these assumptions is the relaxed double-obstacle free energy given by
Frel(ϕ) = σ
2 1−ϕ2+sλ2(ϕ)
, (10)
with
λ(ϕ) := max(0, ϕ−1) + min(0, ϕ+ 1),
where s 0 denotes the relaxation parameter. Frel is introduced in [HHT11] as MoreauYosida relaxation of the double-obstacle free energy
Fobst(ϕ) = (σ
2(1−ϕ2) if |ϕ| ≤1,
0 else,
which is proposed in [BE91] to model phase separation.
In the numerical examples of this work we use the free energy F ≡ Frel. For this choice the splitting into convex and concave part reads
F+(ϕ) =sσ
2λ2(ϕ), F−(ϕ) = σ
2(1−ϕ2).
1 The time discrete setting
In the present section we formulate our time discretization scheme that is based on a weak formulation of (1)(8) which we derive next. To begin with, note that for a suciently smooth solution (ϕ, µ, v) of (1)(8) we can rewrite (1), using the linearity of ρ, as
∂t(ρv) +div(ρv⊗v) +div(v⊗J)−div(2ηDv) +∇p=µ∇ϕ+ρg, (11) see [AGG12, p. 14].
We also note that the term ρv+J in (1) is not solenoidal (which might lead to diculties both in the analytical and the numerical treatment) and that the trilinear form(((ρv+J)· ∇)u, w) is not anti-symmetric. To obtain a weak formulation yielding an anti-symmetric convection term we use a convex combination of (1) and (11) to dene a weak formulation. We multiply equations (1) and (11) by the solenoidal test function 12w ∈ H(div,Ω), integrate over Ω, add the resulting equations and perform integration by parts. This gives
1 2
Z
Ω
(∂t(ρv) +ρ∂tv)w dx+ Z
Ω
2ηDv:Dw dx+a(ρv+J, v, w) = Z
Ω
µ∇ϕw+ρgw dx.
Equations (3)(4) are treated classically. This leads to
Denition 1. We call v, ϕ, µ a weak solution to (1)(8) if v(0) = v0, ϕ(0) = ϕ0, v(t)∈H(div,Ω)for a.e. t ∈I and
1 2
Z
Ω
(∂t(ρv) +ρ∂tv)w dx+ Z
Ω
2ηDv:Dw dx +a(ρv+J, v, w) =
Z
Ω
µ∇ϕw+ρgw dx ∀w∈H(div,Ω), (12) Z
Ω
(∂tϕ+v · ∇ϕ) Φdx+ Z
Ω
m(ϕ)∇µ· ∇Φdx= 0 ∀Φ∈H1(Ω), (13) σ
Z
Ω
∇ϕ· ∇Ψdx+ Z
Ω
F0(ϕ)Ψdx− Z
Ω
µΨdx= 0 ∀Ψ∈H1(Ω), (14) is satised for almost all t ∈I.
Theorem 1. Letv, ϕ, µbe a suciently smooth solution to (12)(14). Then there holds 1
2 d dt
Z
Ω
ρ|v|2+σ|∇ϕ|2+F(ϕ)dx
=− Z
Ω
2η|Dv|2+m|∇µ|2dx+ Z
Ω
ρgv dx.
Proof. By testing (12) withw≡v, (13) withΦ≡µand (14) withΨ≡∂tϕand adding the resulting equations the claim follows.
In [ADG13a, ADG13b] an alternative weak formulation of (1)(8) is proposed, for which the authors show existence of weak solutions.
We now introduce a time discretization which mimics the energy inequality in The- orem 1 on the discrete level. Let 0 =t0 < t1 < . . . < tk−1 < tk < tk+1 < . . . < tM =T denote an equidistant subdivision of the interval I = [0, T] with τk+1−τk = τ. From here onwards the superscriptk denotes the corresponding variables at time instance tk. Time integration scheme
Letϕ0 ∈H1(Ω) and v0 ∈H(div,Ω). Initialization for k = 0:
Set ϕ0 =ϕ0 and v0 =v0.
Find ϕ1 ∈ H1(Ω), µ1 ∈ H1(Ω), v1 ∈ H(div,Ω), such that for all w ∈ H(div,Ω), Φ∈H1(Ω), andΨ∈H1(Ω) it holds
1 τ
Z
Ω
ρ1(v1−v0)w dx+ Z
Ω
((ρ0v0+J1)· ∇)v1·w dx +
Z
Ω
2η1Dv1 :Dw dx− Z
Ω
µ1∇ϕ1w+ρ1gw dx= 0 ∀w∈H(div,Ω), (15) 1
τ Z
Ω
(ϕ1 −ϕ0)Φdx+ Z
Ω
(v0· ∇ϕ0)Φdx +
Z
Ω
m(ϕ0)∇µ1· ∇Φdx= 0 ∀Φ∈H1(Ω), (16) σ
Z
Ω
∇ϕ1· ∇Ψdx− Z
Ω
µ1Ψdx +
Z
Ω
((F+)0(ϕ1) + (F−)0(ϕ0))Ψdx= 0 ∀Ψ∈H1(Ω), (17) whereJ1 :=−dϕdρ(ϕ1)m1∇µ1.
Two-step scheme for k ≥1:
Givenϕk−1 ∈H1(Ω), ϕk ∈H1(Ω), µk∈W1,q(Ω), q > n,vk ∈H(div,Ω),
nd vk+1 ∈H(div,Ω),ϕk+1 ∈H1(Ω), µk+1 ∈H1(Ω) satisfying 1
2τ Z
Ω
ρkvk+1−ρk−1vk
w+ρk−1(vk+1−vk)w dx +a(ρkvk+Jk, vk+1, w) +
Z
Ω
2ηkDvk+1 :Dw dx
− Z
Ω
µk+1∇ϕkw−ρkgw dx= 0 ∀w∈H(div,Ω), (18) 1
τ Z
Ω
(ϕk+1−ϕk)Φdx+ Z
Ω
(vk+1· ∇ϕk)Φdx +
Z
Ω
m(ϕk)∇µk+1· ∇Φdx= 0 ∀Φ∈H1(Ω), (19) σ
Z
Ω
∇ϕk+1· ∇Ψdx− Z
Ω
µk+1Ψdx +
Z
Ω
((F+)0(ϕk+1) + (F−)0(ϕk))Ψdx= 0 ∀Ψ∈H1(Ω), (20) whereJk:=−dρdϕ(ϕk)mk∇µk.
We note that in (18)(20) the only nonlinearity arises from F+0 and thus only the equation (20) is nonlinear. Let us summarize properties of this scheme in the following remark.
Remark 2.
• The time discretization (15)(17) used in the initialization step is motivated by the time discretization in [KSW08] for the equal density case. In particular it yields a sequential coupling of the CahnHilliard and the NavierStokes systems.
Concerning the existence of a unique solution we refer to e.g. [HHK13]. From the regularity theory for the Laplace operator we have µ1 ∈H2(Ω).
• Existence and uniqueness of a solution to the time discrete model (18)(20) is shown in Theorem 6. Using the Assumption A4 posed on F, it can be shown that Newton's method in function space can be used to compute a solution to (18)(20) using the steps from Theorem 6.
• Through the use of ρk−1, (18)(20) is a 2-step scheme. However, by replacing (18) with
1 2τ
Z
Ω
ρk+1vk+1−ρkvk
w+ρk(vk+1−vk)w dx +a(ρkvk+Jk, vk+1, w) +
Z
Ω
2ηDvk+1 :Dw dx
− Z
Ω
µk+1∇ϕkw+ρkgw dx= 0 ∀w∈H(div,Ω),
one obtains an one-step scheme, which then also is nonlinear in the time dis- cretization of (12). The resulting system is analyzed in a forthcoming paper.
In [GK14] Grün and Klingbeil propose a time-discrete solver for (1)(8) which leads to strongly coupled systems for v, ϕ and p at every time step and requires a fully nonlinear solver. For this scheme Grün in [Grü13] proves an energy inequality and the existence of so called generalized solutions.
2 The fully discrete setting and energy inequalities
For a numerical treatment we next discretize the weak formulation (18)(20) in space.
We aim at an adaptive discretization of the domain Ω, and thus to have a dierent spatial discretization in every time step.
Let Tk = SN T
i=1Ti denote a conforming triangulation of Ω with closed simplices Ti, i= 1, . . . , N T and edges Ei, i= 1, . . . , N E, Ek =SN E
i=1Ei. Here k refers to the time instancetk. On Tk we dene the following nite element spaces:
V1(Tk) ={v ∈C(Tk)|v|T ∈P1(T)∀T ∈ Tk}=:span{Φi}N Pi=1, V2(Tk) ={v ∈C(Tk)|v|T ∈P2(T)∀T ∈ Tk},
wherePl(S) denotes the space of polynomials up to order l dened on S. We introduce the discrete analogon to the space H(div,Ω):
H(div,Tk) = {v ∈ V2(Tk)n|(divv, q) = 0∀q∈ V1(Tk)∩L2(0)(Ω), v|∂Ω = 0}
:=span{bi}N Fi=1,
We further introduce a H1-stable projection operator Pk :H1(Ω) → V1(Tk) satis- fying
kPkvkLp(Ω)≤ kvkLp(Ω) and k∇PkvkLr(Ω) ≤ k∇vkLr(Ω)
for v ∈ H1(Ω) with r ∈ [1,2] and p ∈ [1,6) if n = 3, and p ∈ [1,∞) if n = 2. Possible choices are the Clément operator ([Clé75]) or, by restricting the preimage to C(Ω)∩H1(Ω), the Lagrangian interpolation operator.
Using these spaces we state the discrete counterpart of (18)(20):
Let k ≥ 1, given ϕk−1 ∈ V1(Tk−1), ϕk ∈ V1(Tk), µk ∈ V1(Tk), vk ∈ H(div,Tk), nd vk+1h ∈ H(div,Tk+1), ϕk+1h ∈ V1(Tk+1), µk+1h ∈ V1(Tk+1) such that for all w ∈ H(div,Tk+1), Φ∈ V1(Tk+1), Ψ∈ V1(Tk+1) there holds:
1
2τ(ρkvhk+1−ρk−1vk+ρk−1(vhk+1−vk), w) +a(ρkvk+Jk, vhk+1, w)
+(2ηkDvk+1h , Dw)−(µk+1h ∇ϕk+ρkg, w) = 0, (21) 1
τ(ϕk+1h − Pk+1ϕk,Φ) + (m(ϕk)∇µk+1h ,∇Φ) + (vk+1h ∇ϕk,Φ) = 0, (22) σ(∇ϕk+1h ,∇Ψ) + (F+0(ϕk+1h ) +F−0(Pk+1ϕk),Ψ)−(µk+1h ,Ψ) = 0, (23)
where ϕ0 = P ϕ0 denotes the L2 projection of ϕ0 in V1(T0), v0 = PLv0 denotes the Leray projection ofv0 inH(div,T0) (see [CF88]), andϕ1h, µ1h, vh1 are obtained from the fully discrete variant of (15)(17).
2.1 Existence of solution to the fully discrete system
We next show the existence of a unique solution to the fully discrete system (21)(23).
Theorem 2. There exist vhk+1 ∈ H(div,Tk+1), ϕk+1h ∈ V1(Tk+1), µk+1h ∈ V1(Tk+1) solving (21)(23).
Proof. By testing (22) with Φ ≡ 1, integration by parts in (vk+1h ∇ϕk,1) and using vhk+1 ∈H(div,Tk+1) we obtain
(ϕk+1h ,1) = (Pk+1ϕk,1).
We dene α= |Ω|1 R
ΩPk+1ϕkdx and set
V(0) :={vh ∈ V1(Tk+1) | (vh,1) = 0}.
Thenzk+1 :=ϕk+1−αfullls zk+1 ∈V(0). In the following we use zk+1 as unknown for the phase eld, since the mean value of ϕ is xed. In addition we introduce yk+1 :=
µk+1h −|Ω|1 R
µk+1h dxand require (22)(23) preliminarily only for test functions with zero mean value.
We dene
X =H(div,Tk+1)×V(0)×V(0), with the inner product
((v1, y1, z1),(v2, y2, z2))X := (Dv1, Dv2) + (∇y1,∇y2) + (∇z1,∇z2),
and norm k · k2X = (·,·)X. It follows from the inequalities of Korn and Poincaré that (·,·)X indeed forms an inner product onX. For (v, y, z)∈X we dene
(G(v, y, z),(v, y, z))X :=
1
2(ρk+ρk−1)v−ρk−1vk, v
+τ a(ρkvk+Jk, v, v) +τ(2ηkDv, Dv)−τ(y∇ϕk, v)−τ(ρkg, v)
+ (z− Pk+1ϕk, y) +τ(m(ϕk)∇y,∇y) +τ(v∇ϕk, y) +σ(∇z,∇z) + (F+0(z+α) +F−0(Pk+1ϕk), z)−(y, z).
Now we show(G(v, y, z),(v, y, z))X >0fork(v, y, z)kX large enough and thatGsatises the supposition of [Tem77, Lem. II.1.4]. It then follows from [Tem77, Lem. II.1.4], that Gadmits a root (v∗, y∗, z∗)∈X.
The function Gis obviously continuous. We now estimate (G(v, y, z),(v, y, z))X ≥ρ(v, v) + 2τ η(Dv, Dv)
+τ m(∇y,∇y) +σ(∇z,∇z) + (F+0(z+α), z)
−(ρk−1vk, v)−τ(ρkg, v)−(Pk+1ϕk, y) + (F−0(Pk+1ϕk), z).
Using the convexity ofF+, which implies that F+0 is monotone, we obtain (24)
(F+0(z+α), z) = (F+0 (z+α)−F+0(α), z) + (F+0(α), z)≥(F+0(α), z).
By using Hölder's and Poincaré's inequality in (24) we obtain (G(v, y, z),(v, y, z))X >0
fork(v, y, z)kX ≥RifRis large enough. Now [Tem77, Lem. II.1.4] implies the existence of (v∗, y∗, z∗) ∈X such that G(v∗, y∗, z∗) = 0. Dening (v, µ, ϕ) = (v∗, y∗+β, z∗+α) withβ such that(β,1) = (F+0(ϕ) +F−0(Pk+1ϕk),1)we obtain that(v, µ, ϕ)solves (21) (23).
Remark 3. Note that we do not need that the variables from old time instances are dened on the mesh used on the current time instance. We further do not need any smallness requirement on the mesh size h or on the time step length τ.
Theorem 3. Let(ϕk+1h , µk+1h , vhk+1) be a solution to (21)(23). Then fork ≥1: 1
2 Z
Ω
ρk vhk+1
2 dx+σ 2
Z
Ω
|∇ϕk+1h |2dx+ Z
Ω
F(ϕk+1h )dx +1
2 Z
Ω
ρk−1|vk+1h −vk|2dx+ σ 2
Z
Ω
|∇ϕk+1h − ∇Pk+1ϕk|2dx +τ
Z
Ω
2ηk|Dvhk+1|2dx+τ Z
Ω
mk|∇µk+1h |2dx
≤ 1 2
Z
Ω
ρk−1 vk
2 dx+ σ 2
Z
Ω
|∇Pk+1ϕk|2dx+ Z
Ω
F(Pk+1ϕk)dx+τ Z
Ω
ρkgvhk+1. (25) Proof. We have
1
2 ρkvhk+1−ρk−1vk
·vhk+1+1
2ρk−1 vhk+1−vk
·vhk+1
= 1 2ρk
vhk+1
2+1 2ρk−1
vhk+1−vk
2−1 2ρk−1
vk
2, (26)
∇ϕk+1h · ∇ϕk+1h − ∇ϕk
=1
2|∇ϕk+1h |2− 1
2|∇ϕk|2+1
2|∇ϕk+1h − ∇ϕk|2, (27)
and since F+ is convex and F− is concave,
F+(ϕk+1h )−F+(ϕk)≤F+0(ϕk+1h )(ϕk+1h −ϕk), (28) F−(ϕk+1h )−F−(ϕk)≤F−0(ϕk)(ϕk+1h −ϕk). (29) The inequality is now obtained from testing (18) with vhk+1, (19) with µk+1h , (20) with (ϕk+1h − Pk+1ϕk)/τ, and adding the resulting equations. This leads to
1
2τ(ρkvhk+1−ρk−1vk, vhk+1) + 1
2τ(ρk−1(vhk+1−vk), vk+1h ) +a(ρkv+Jk, vhk+1, vhk+1) + (2ηkDvhk+1 :Dvhk+1)−(µk+1h ∇ϕk, vk+1h ) +1
τ(ϕk+1h − Pk+1ϕk, µk+1h ) + (vhk+1∇ϕk, µk+1h ) + (mk∇µk+1h ,∇µk+1h ) +σ1
τ(∇ϕk+1h ,∇(ϕk+1h − Pk+1ϕk))− 1
τ(µk+1h , ϕk+1h − Pk+1ϕk) +1
τ(F+0(ϕk+1h ), ϕk+1h − Pk+1ϕk) + 1
τ(F−0(ϕk), ϕk+1h − Pk+1ϕk)
−(ρkg, vk+1h ) = 0.
The equalities (26) and (27) and the inequalities (28) and (29) now imply 1
2τ Z
Ω
ρk|vk+1h |2+ρk−1|vhk+1−vk|2 −ρk−1|vk|2 dx +
Z
Ω
2ηk|Dvk+1h |2dx+ Z
Ω
mk|∇µk+1h |2dx +σ
2τ Z
Ω
|∇ϕk+1h |2dx− σ 2τ
Z
Ω
|∇Pk+1ϕk|2dx+ σ 2τ
Z
Ω
|∇ϕk+1h − ∇Pk+1ϕk|2dx +1
τ Z
Ω
F(ϕk+1h )−F(Pk+1ϕk) dx−
Z
Ω
ρkgvhk+1dx≤0, which is the claim.
Theorem 4. System (21)(23) admits a unique solution.
Proof. Assume there exist two dierent solutions to (21)(23) denoted by (v1, ϕ1, µ1) and (v2, ϕ2, µ2). We show that the dierence v =v1 −v2, ϕ =ϕ1−ϕ2, µ =µ1 −µ2 is zero.
After inserting the two solutions into (21)(23) and substracting the two sets of equations we perform the same steps as for the derivation of the discrete energy esti- mate, Theorem 3, and obtain
0 =1 2
Z
Ω
(ρk+ρk−1)v2dx+ 2τ Z
Ω
ηk|Dv|2dx +τk√
mk∇µk2 +σk∇ϕk2+ F+0(ϕ1)−F+0(ϕ2), ϕ1−ϕ2 .
Since all these terms are non negative we obtain 1
2 Z
Ω
(ρk+ρk−1)v2dx=0,
Z
Ω
ηk|Dv|2dx=0, k∇µk2 =0, k∇ϕk2 =0.
Since bothη(·)andρ(·)are strictly positive by Assumption A1 we concludekvkH1(Ω)n = 0and thus the uniqueness of the velocity eld.
By testing (22) by Φ ≡ 1 we obtain (ϕ1,1) = (ϕ2,1) = (Pk+1ϕk,1) and thus (ϕ1−ϕ2,1) = 0. Poincaré-Friedrichs inequality then yieldskϕkH1(Ω) = 0, and thus the uniqueness of the phase eld.
Last we directly obtain that the chemical potential is unique up to a constant.
By testing (23) with Ψ ≡ 1 and inserting the two solutions we obtain (µ1−µ2,1) = (F+0(ϕ1)−F+0(ϕ2),1) = 0 and thus kµkH1(Ω) = 0, again by using Poincaré-Friedrichs inequality.
Theorem 3 estimates the Ginzburg Landau energy of the current phase eld ϕk+1 against the Ginzburg Landau energy of the projection of the old phase eld Pk+1(ϕk). Our aim is to obtain global in time inequalities estimating the energy of the new phase eld against the energy of the old phase eld at each time step. For this purpose let us state an assumption that later will be justied.
Assumption 1. Let ϕk ∈ V1(Tk) denote the phase eld at time instance tk. Let Pk+1ϕk ∈ V1(Tk+1) denote the projection of ϕk in V1(Tk+1). We assume that there holds
F(Pk+1ϕk) + 1
2σ|∇Pk+1ϕk|2 ≤F(ϕk) + 1
2σ|∇ϕk|2. (30) This assumption means, that the Ginzburg Landau energy is not increasing through projection. Thus no energy is numerically produced.
Assumption 1 is in general not fullled for arbitrary sequences (Tk+1) of triangula- tions. To ensure (30) we add a post processing step to the adaptive space meshing, see Section 3.
Theorem 5. Assume that for every k = 0,1, . . . Assumption 1 holds. Then for every
1≤k < l we have 1
2(ρk−1h vkh, vkh)+
Z
Ω
F(ϕkh)dx+ 1
2σ(∇ϕkh,∇ϕkh) +τ
l−1
X
m=k
(ρmg, vhm+1)
≥ 1
2(ρl−1vhl, vhl) + Z
Ω
F(ϕlh)dx+1
2σ(∇ϕlh,∇ϕlh) +
l−1
X
m=k
(ρm−1(vhm+1−vmh),(vhm+1−vmh))
+τ
l−1
X
m=k
(2ηmDvhm+1, Dvhm+1)
+τ
l−1
X
m=k
(m(ϕmh)∇µm+1h ,∇µm+1h )
+ 1 2σ
l−1
X
m=k
(∇ϕm+1h − ∇Pm+1ϕmh,∇ϕm+1h − ∇Pm+1ϕmh).
Proof. The stated result is obtained immediately from the energy estimate over one time step (3) together with the Assumption 1.
Remark 4. We note that using Φ = 1 in (22) and using integration by parts only delivers (ϕk+1h ,1) = (Pk+1ϕk,1) instead of (ϕk+1h ,1) = (ϕk,1). If we use the quasi interpolation operator Qk+1 introduced by Carstensen in [Car99] for our generic pro- jectionPk+1, we would obtain (ϕk+1h ,1) = (ϕk,1)since Qk+1 preserves the mean value, i.e. (ϕk+1h ,1) = (Qk+1ϕk,1) ∀ϕ∈L1(Ω).
On the other hand if we use Lagrange interpolation Ik+1 we have |(Ik+1ϕk,1)T − (ϕk,1)T| ≤Ch3TkϕkkT, and the deviation of (Ik+1ϕk,1) from (ϕk,1) remaines small if we use bisection as renement strategy, since thenIk+1ϕk∈ V1(Tk+1)andϕk∈ V1(Tk) only dier on coarsened patches.
2.2 Existence of a solution to the time discrete system
Now we have shown that there exists a unique solution to (21)(23). The energy inequality can be used to obtain uniform bounds on the solution and will be used to obtain a solution to the time discrete system (18)(20) by a Galerkin method.
Theorem 6. Letvk∈H(div,Ω), ϕk−1 ∈H1(Ω), ϕk∈H1(Ω), andµk ∈W1,q(Ω), q > n be given data. Then there exists a weak solution to (18)(20). Moreover,ϕk+1 ∈H2(Ω) and µk+1 ∈H2(Ω) holds.
Proof. We proceed as follows. We construct a sequence of meshes (Tlk+1)l→∞ with gridsizehl l→∞−→0. We show that the sequence (vk+1l , ϕk+1l , µk+1l )of unique and discrete
solutions to (21)(23) is bounded independently of l, and thus a weakly convergent subsequence exists which we show to converge to a weak solution of (18)(20).
Let us start with dening the sequence of meshes. Let T0k+1 = Tk+1 and Tl+1k+1, l = 0,1, . . ., be obtained from Tlk+1 by bisection of all triangles. The projection onto Tlk+1 we denote byPlk+1.
From the discrete energy inequality (25) we obtain 1
2 Z
Ω
ρk vlk+1
2 dx+ σ 2
Z
Ω
|∇ϕk+1l |2dx+ Z
Ω
F(ϕk+1l )dx +1
2 Z
Ω
ρk−1|vlk+1−vk|2dx+σ 2
Z
Ω
|∇ϕk+1l − ∇Plk+1ϕk|2dx +τ
Z
Ω
2ηk|Dvlk+1|2dx+τ Z
Ω
mk|∇µk+1l |2dx
≤ 1 2
Z
Ω
ρk−1 vk
2 dx+ σ 2
Z
Ω
|∇Plk+1ϕk|2dx+ Z
Ω
F(Plk+1ϕk)dx+τ Z
Ω
ρkgvk+1l . We have the stability of the projection operator and thus
Z
Ω
|∇Plk+1ϕk|2dx≤ k∇ϕkk2L2(Ω).
Due to Assumption A3 onF there exists a constant C >0 such that Z
Ω
F(Plk+1ϕk)dx≤C Z
Ω
|Plk+1ϕk|q+ 1dx
≤C
kPlk+1ϕkkqLq(Ω)+ 1
≤C
kϕkkqLq(Ω)+ 1 ,
where we again use theLq-stability of the projection operator together with the Sobolev embeddingH1(Ω),→Lq(Ω) with q as in Assumption A3. By using Hölder's inequality and Young's inequality we further have
τ Z
Ω
ρkgvlk+1dx≤τ Z
Ω
ρk|g|2dx
1/2Z
Ω
ρk|vk+1l |2dx 1/2
≤τ2 Z
Ω
ρk|g|2dx+ 1 4
Z
Ω
ρk|vlk+1|2dx
Since ρk−1 > 0, ρk > 0, ηk > 0, and mk > 0 by Assumption A1 we obtain that kvlk+1kH1(Ω), k∇ϕk+1l k and k∇µk+1l k are uniformly bounded independend of l.
By inserting Φ ≡ 1 in (22) we obtain (Plk+1ϕk,1) = (ϕk+1l ,1) and by Poincaré- Friedrichs inequality thus
kϕk+1l kH1(Ω) ≤C k∇ϕk+1l k+ (Plk+1ϕk,1)
≤C k∇ϕk+1l k+kPlk+1ϕkk
≤C k∇ϕk+1l k+kϕkk .
Thuskϕk+1l kH1(Ω) is uniformly bounded.
By inserting Ψ≡1 in (23) we obtain(µk+1l ,1) = (F+0(ϕk+1l ) +F−0 (Plk+1ϕk),1). Due to the Assumption A3 onF+0 the rst part can be bounded byC(kϕk+1l kqLq(Ω)+ 1)which is bounded by Sobolev embedding. Also due to Assumption A3 on F− and due to the Lq stability ofPlk+1 the second part can be bounded byC(kϕkkqLq(Ω)+ 1). Thus, by the same arguments as kϕk+1l kH1(Ω), also kµk+1l kH1(Ω) is uniformly bounded.
Consequently there exist v ∈ H01(Ω)n, ϕ ∈ H1(Ω), µ ∈ H1(Ω) and a subsequence li such thatvk+1l
i * v inH01(Ω)n, ϕk+1l
i * ϕ in H1(Ω), µk+1l
i * µ in H1(Ω) for li → ∞. We show that this triple of functions indeed is a weak solution to (18)(20). Inserting the sequence into (18)(20) yields
1 2τ
Z
Ω
ρkvlk+1
i −ρk−1vk
w+ρk−1(vk+1l
i −vk)w dx +a(ρkvk+Jk, vlk+1
i , w) + Z
Ω
2ηkDvlk+1
i :Dw dx
− Z
Ω
µk+1l
i ∇ϕkw+ρkgw dx= 0, ∀w∈H(div,Ω) (31) τ−1
Z
Ω
(ϕk+1l
i −ϕk)Φdx+
Z
Ω
(vk+1l
i · ∇ϕk)Φdx
+ Z
Ω
m(ϕk)∇µk+1l
i · ∇Φdx= 0, ∀Φ∈H1(Ω) (32)
σ Z
Ω
∇ϕk+1l
i · ∇Ψdx−
Z
Ω
µk+1l
i Ψdx
+ Z
Ω
((F+)0(ϕk+1l
i ) + (F−)0(ϕk))Ψdx= 0.∀Ψ∈H1(Ω). (33) Now there holds
1 2τ
Z
Ω
ρk+ρk−1 vlk+1
i w dx≤ 1
τρkvlk+1
i kL2(Ω)kwkL2(Ω) and thus 2τ1 R
Ω ρk+ρk−1
w· dx∈(H01(Ω)n)∗ yielding 1
2τ Z
Ω
ρk+ρk−1 vlk+1
i w dx → 1
2τ Z
Ω
ρk+ρk−1
vw dx.
Since µk ∈W1,q(Ω), q > n there holds Jk ∈Lq(Ω) and thus by Sobolev embedding we obtain
Z
Ω
ρkvk+Jk
· ∇ vlk+1
i
w dx
≤Ck ρkvk+Jk
wkk∇vk+1l
i k,
Z
Ω
ρkvk+Jk
· ∇ w
vlk+1
i dx
≤Ck ρkvk+Jk
∇ wk
L
2q q+2kvlk+1
i k
L
2q q−2,
and thusa(ρkvk+Jk,·, w)∈(H01(Ω)n)∗. This gives a(ρkvk+Jk, vk+1l
i , w)→a(ρkvk+Jk, v, w)
The convergence of the remaining terms can be concluded in a similar manner.
Since ϕk+1l
i * ϕ inH1(Ω) there exists a subsequence, again denoted by li such that ϕk+1l
i →ϕ inLq(Ω), q as in Assumption A3. From Assumption A3 and the dominated convergence theorem we thus obtain
Z
Ω
F+0(ϕk+1l
i )Ψdx →
Z
Ω
F+0(ϕ)Ψdx.
Next we show the weak solenoidality of v. To begin with we note that every q ∈ L2(0)(Ω) can be approximated by a sequence (ql)l∈N ⊂ V1(Tlk+1)∩L2(0)(Ω), so that for every ξ > 0 an index Nξ exists, such that kq−qlk ≤ ξ for l ≥ Nξ. Now we have for arbitraryq ∈L2(0)(Ω)
|(div v, q)| ≤ |(divv, q−ql)|+|(div v−div vli, ql)|+|(div vli, ql)|.
Letξ >0be given. For the rst addend we have|(div v, q−ql)| ≤ kdiv vkkq−qlk ≤Cξ forl ≥Nξ.
Since the sequence ql is dened on the same hierarchy of meshes as vl we may restrict ql to the subsequence li and obtain that both qli and vli are dened on the same meshes. We set k := min{li|li ≥ Nξ}. Now we have (div vli, qk) = 0 for li ≥ k, since then qk ∈ V1(Tlk+1
i ), i.e. the third addend vanishes. By choosing li so large that
|(div v −divvli, qk)| ≤ Cξ holds by weak convergence of vli, the weak solenoidality of v is shown, sinceξ >0 is chosen arbitrarily.
Thus the triplev, ϕ, µ indeed is a weak solution.
It remains to obtain the stated higher regularity for µk+1 and ϕk+1. This directly follows by regularity results for the Laplacian, see [EG04, Thm. 3.10]. Since µk+1− F+0 (ϕk+1)−F−0(ϕk) ∈ L2(Ω) it follows that ϕk+1 ∈ H2(Ω) and thus, since we have τ−1(ϕk+1−ϕk) +vk+1∇ϕk ∈L2(Ω), also µk+1 ∈H2(Ω).
The uniqueness of the solution follows by the same steps as the uniqueness of the discrete solutions, see Theorem 4. Like the fully discrete scheme, also the time-discrete scheme fullls an energy inequality.
Theorem 7. Letϕk+1, µk+1, vk+1 be a solution to (18)(20). Then the following energy
inequality holds.
1 2
Z
Ω
ρk vk+1
2 dx+σ 2
Z
Ω
|∇ϕk+1|2dx+ Z
Ω
F(ϕk+1)dx +1
2 Z
Ω
ρk−1|vk+1−vk|2dx+ σ 2
Z
Ω
|∇ϕk+1− ∇ϕk|2dx +τ
Z
Ω
2ηk|Dvk+1|2dx+τ Z
Ω
mk|∇µk+1|2dx
≤ 1 2
Z
Ω
ρk−1 vk
2 dx+ σ 2
Z
Ω
|∇ϕk|2dx+ Z
Ω
F(ϕk)dx.+ Z
Ω
ρkgvk+1
Proof. The inequality is obtaind from testing (18) withvk+1, (19) with µk+1, (20) with (ϕk+1−ϕk)/τ and using the same arguments as in the proof for Theorem 3.
Remark 5. Let F denote the relaxed double-obstacle free energy introduced in Re- mark 1, with relaxation parameters. Let(vs, ϕs, µs)s∈R denote the sequence of solutions of (18)(20) for a sequence(sl)l∈N. From the linearity of (18) and [HHT11, Prop. 4.2]
it follows, that there exists a subsequence, still denoted by (vs, ϕs, µs)s∈R, such that (vs, ϕs, µs)s∈R→(v∗, ϕ∗, µ∗) in H1(Ω),
where (v∗, ϕ∗, µ∗) denotes the solution of (18)(20), whereFobst, denoted in Remark 1, is chosen as free energy. Especially |ϕ∗| ≤ 1 holds. In the following argumentation we concentrate on the phase eld only. From the regularity ϕs ∈ H2(Ω) together with a-priori estimates on the solution of the Poisson problem and the energy inequality of Theorem 7, we obtain the existence of a strongly convergent subsequence ϕs0 → ϕ∗ in C0,α(Ω), where we use the compact embedding H2(Ω),→C0,α(Ω) for 2α <4−n.
Thus for s large enough we have |ϕs| ≤1 +θ with θ arbitrarily small. Currently we are not able to quantify how large s has to be chosen in dependence of θ to guarantee this bound. Therefore we use the cut-o procedure described before Remark 1.
3 The A-Posteriori Error Estimation
For an ecient solution of (21)(23) we next describe an a-posteriori error estimator based mesh renement scheme that is reliable and ecient up to terms of higher order and errors introduced by the projection. We also describe how Assumption 1 on the evolution of the free energy, given in (25), under projection is fullled in the discrete setting.
Let us briey comment on available adaptative concepts for the spatial discretization of CahnHilliard NavierStokes systems. Heuristic approaches exploiting knowledge of the location of the diuse interface can be found in [KSW08, BBG11, AV12, GK14]. In [HHK13] a fully adaptive, reliable and ecient, residual based error estimator for the CahnHilliard part in the CahnHilliard NavierStokes system is proposed, which ex- tends the results of [HHT11] for CahnHilliard to CahnHilliard NavierStokes systems