and multiple agents
Inauguraldissertation zur
Erlangung des Doktorgrades der
Wirtschafts- und Sozialwissenschaftlichen Fakultät der Universität zu Köln
2014 vorgelegt
von
Dipl.-Vw. David Jakob Kusterer
aus
Nürnberg
Tag der Promotion: 26. Juni 2014
Acknowledgments
First and foremost, I want to thank my supervisor Patrick Schmitz for his guidance and valuable advice. I am very grateful for his continuing support and encouraging feedback at every stage of the preparation of my thesis. Writing our joint paper had a great influence shaping my thinking about economic problems and my method of working. In this regard, I am also indebted to my colleague and co-author Eva Hoppe. Our fruitful discussions lead to several research projects which are included in this thesis. I also would like to thank Oliver Gürtler for co-refereeing this thesis and Johannes Münster for chairing the defense board.
Furthermore, I am thankful to Gary Bolton for inviting me to Penn State University. Our discussions about electronic feedback systems during my research stay together with Johannes Mans lead to the paper “Leniency in feedback giving”
which is not included in this thesis. I also want to thank Axel Ockenfels and the DFG research unit “Design & Behavior” for supporting this research stay, and Ben Greiner for inviting me to the University of New South Wales. Moreover, I would like to thank Achim Wambach for the valuable discussions and support not only concerning our joint paper.
I am thankful for the full scholarship by the Cologne Graduate School in Management, Economics and Social Sciences and the federal state North Rhine- Westphalia I received during 2009–2012 which allowed me to concentrate on my research, and for the financial support by the DAAD for the research stay at Penn State.
In addition, I would like to thank Dagmar Weiler and Susanne Ludewig- Greiner from the CGS for their continuing support, and our secretary Kristin Pfeiffer and the student assistants Jana Boes, Felix Meickmann and Linda Piel- sticker for providing valuable assistance conducting the laboratory experiments.
I also want to thank my colleagues from the CGS and the Department of
Economics for academic and non-academic discussions over lunch and between
office doors: Pascal Bruno, Kristian Dicke, Christoph Feldhaus, Nicolas Fugger,
Katharina Huesmann, Alexander Rasch, Andreas Pollack, Christian Waibel, and
Christopher Zeppenfeld. Particularly, I want to thank my friends, colleagues and
co-authors Florian Gössl and Johannes Mans. Working together with them was
fun and rewarding in so many ways, both professionally and personally. I am also grateful to Tine for her support.
Finally, I thank my parents Margret and Joachim and my sisters Anne and Eva for their support and encouragement not only throughout my doctoral studies.
This thesis is dedicated to them.
Cologne, July 2014 David Jakob Kusterer
1 Introduction 1
2 Searching for evidence: less can be more 7
2.1 Introduction . . . . 7
2.2 The model . . . . 12
2.3 Analysis . . . . 14
2.3.1 Situation 1: Search is possible in all three dimensions . . 15
2.3.2 Situation 2: Scope of search is restricted . . . . 21
2.3.3 Comparison of Situations 1 and 2 . . . . 22
2.4 Discussion . . . . 28
2.5 Conclusion . . . . 31
2.6 Appendix . . . . 33
2.6.1 Other equilibria in pure strategies . . . . 33
2.6.2 Proofs . . . . 37
3 Conflicting tasks and moral hazard 51 3.1 Introduction . . . . 51
3.2 The theoretical framework . . . . 54
3.3 Design . . . . 61
3.4 Qualitative hypotheses . . . . 64
3.5 Data analysis . . . . 66
3.5.1 Experimental results . . . . 66
3.5.2 Individual wage offers and resulting efforts . . . . 69
3.6 Discussion . . . . 75
3.7 Concluding remarks . . . . 77
3.8 Appendix A: Proofs . . . . 79
3.9 Appendix B: Probabilities of sale . . . . 82
3.10 Appendix C: Instructions . . . . 83
4 Public-private partnerships versus traditional procurement 105 4.1 Introduction . . . 105
4.2 Public-private partnerships vs. traditional procurement . . . 109
4.2.1 Theoretical framework . . . 109
4.2.2 Experimental design . . . 112
4.2.3 Predictions . . . 115
4.2.4 Results . . . 117
4.3 Subcontracting . . . 125
4.3.1 Theoretical framework . . . 125
4.3.2 Experimental design . . . 128
4.3.3 Predictions . . . 130
4.3.4 Results . . . 130
4.4 Conclusion . . . 139
4.5 Appendix: Instructions . . . 142
5 Behavioral biases and cognitive reflection 151 5.1 Introduction . . . 151
5.2 Experimental design . . . 152
5.3 Cognitive reflection test . . . 153
5.4 Results . . . 154
5.4.1 Base rate fallacy . . . 154
5.4.2 Conservatism bias . . . 156
5.4.3 Overweighting and underweighting of base rates . . . . 157
5.4.4 Overconfidence . . . 158
5.4.5 Endowment effect . . . 159
Bibliography 161
Curriculum vitae 171
Introduction
One of the central results of economics is that incentives matter. Contract theory, the branch of economics that is concerned with the optimal design of incentives, has seen a considerable growth in the last decades. In the most simple model, a principal wants to delegate a task he cannot conduct himself to an agent who incurs a disutility from working. Hence, the incentives of principal and agent are not aligned, and the principal has to design an appropriate incentive scheme which motivates the agent to perform the task at the lowest cost. Contracting frictions arise when the effort of the agent is not observable by the principal or when she does not know whether the agent is highly skilled or lacking ability.
Early studies on incentive provision have covered problems where the prin- cipal delegates one task to one agent.
1However, most real-world contracting problems consist of more than one task to be carried out, and principals typically hire more than one agent. In such situations, the interactions between the agents and between the incentives for the individual tasks have to be taken into account.
Since the seminal paper by Holmström and Milgrom (1991), such problems have become of great interest to the theory of incentives.
2This thesis consists of four self-contained chapters concerning problems where there are multiple tasks to be delegated. One study is theoretical, two com- bine theory and evidence from the laboratory, and one is experimental. Testing the predictions of contract-theoretical models empirically is subject to difficulties
1See, for example, Spence and Zeckhauser (1971), Ross (1973), Mirrlees (1976), Holmström (1979), Grossman and Hart (1983).
2For overviews of the multi-tasking literature, see Dewatripont et al. (2000), Laffont and Martimort (2002, Chapter 5), and Bolton and Dewatripont (2005, Chapter 6).
due to the non-observability of the agents’ efforts or their types.
3Hence, the controlled environment of laboratory experiments is very useful as a first step for testing the empirical relevance of the theoretical models.
In Chapter 2, we analyze a theoretical model where an uninformed decision- maker has to make a decision based on evidence in favor and against a proposal.
The information is gathered by two biased groups, one of which searches for favorable evidence while the other searches for evidence against the proposal.
Chapter 3 theoretically and experimentally considers a problem where a principal has to delegate two tasks that are in direct conflict with each other. In the theoretical and experimental study presented in Chapter 4, a government wants to provide a public service. It can delegate the two tasks of building and subsequently operating the facility either to a public-private partnership or to two independent private contractors. In our experimental studies, social preferences in the form of fairness and reciprocity influence our results. While social preferences have received considerable attention in experimental economics, there are only a few studies on the effect of cognitive abilities. We report on a short experimental study in Chapter 5 on the relationship between cognitive abilities and behavioral biases.
In Chapter 2,
4we study a problem of multi-dimensional information trans- mission where an uninformed decision-maker receives information relevant to the decision from two biased experts. We show that reducing the dimensions on which information can be gathered—and hence reducing complexity—can increase welfare. Suppose two firms want to merge, and a judge has to decide whether to accept or to reject the merger proposal based on information provided to her by the merging firms and an antitrust authority (regulator). We assume that there is information about the effects of the merger on welfare in three dimensions.
In each of the dimensions, there exists either only information in favor of the proposal, only information against the proposal, conflicting information both in
3See Prendergast (1999) and Chiappori and Salanié (2003) for an overview of empirical studies on the provision of incentives.
4This chapter is joint work with Achim Wambach and Florian Gössl. Achim Wambach suggested the idea and wrote a first draft. Florian Gössl and I extended and generalized the model, conducted the analysis, and wrote the current draft.
against it. The firms and the regulator are asymmetric in the sense that the benefit of a cleared merger for the firms exceeds the benefits of the bureaucrats of the antitrust authority in case of a blocked merger. Due to the large expected profits of a successful merger, the firms always search on all admissible dimensions. When the firms and the regulator are sufficiently asymmetric, there is an equilibrium where the regulator does not search at all. The information provided to the judge hence is biased, and she has to make her decision based on information in favor of the proposal and on the expected value of information against the proposal. In this situation, it is possible that decision errors occur, which reduce welfare. We show in a first step that in such an asymmetric situation, simplifying the decision process in that the judge only accepts evidence from two of the three dimensions enables the regulator to equal the search efforts by the firms. In a second step, we show that in this situation, the judge is able to make better decisions because the information available to her is more balanced. Compared to the situation where only the firms search, welfare can be larger.
6This model can also be applied to the case of lobbying where, for example, big tobacco and small consumer protection groups provide politicians working on new legislation on the ban of tobacco advertising with information about the health effects of smoking, or to white collar crime trials, where big firms with large resources and understaffed prosecutors battle in court.
In the study presented in Chapter 3,
7a principal wants to delegate two tasks that are in direct conflict with each other, i.e., providing effort in one task may have a negative side effect on the success probability of the other
5This information structure is an extension of Dewatripont and Tirole (1999) to multiple dimensions.
6Results where restrictions can be beneficial have also been shown in the lobbying literature where a cap on political contributions can make voters better off or lead to better policy decisions (see Prat, 2002b; Cotton, 2012), and in the literature on optimal delegation, where a restriction of the action space of the agent can increase his search incentives (see Szalay, 2005; Alonso and Matouschek, 2008).
7This chapter is based on Hoppe and Kusterer (2011b). Eva Hoppe suggested the idea for the paper and Eva Hoppe and I carried out the theoretical analysis. Eva Hoppe designed the experiment, while I programmed and conducted it (the data collection was part of my diploma thesis). Together, we analyzed the data and wrote the draft.
and vice versa.
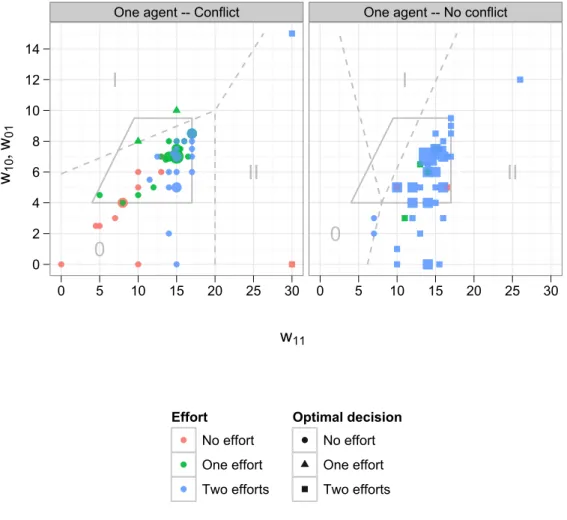
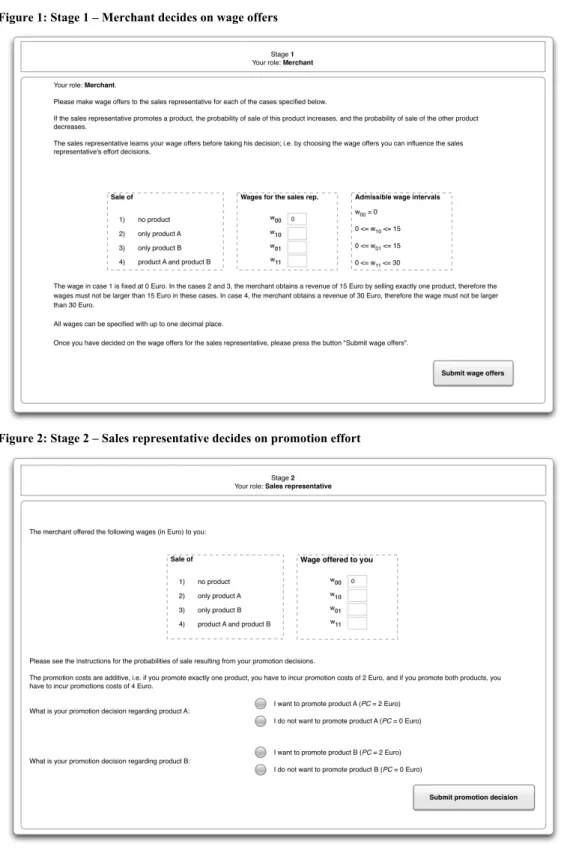
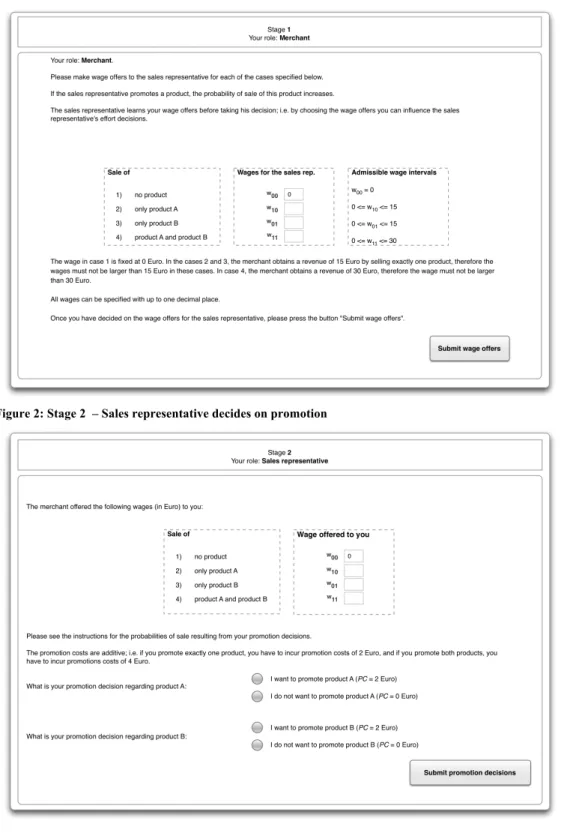
8In such situations, job design becomes a major issue and we show that implementing two efforts can be facilitated by hiring two agents instead of one agent. Consider a merchant (principal) who wants to sell two products which may be imperfect substitutes. She can either hire one or two sales representatives (agents) in order to promote the products. If the products are imperfect substitutes, then promoting one product increases its sales probability, while it reduces the sales probability of the other. If the merchant hires only one sales representative, the sales representative is reluctant to promote both products as he hurts his own efforts on the respective other product, which makes inducing two efforts very expensive for the merchant. However, if the merchant hires two sales representatives, the competition between them makes inducing two efforts cheaper for her. In case of conflict between the tasks, it depends on the parameter constellation whether hiring one or two sales representatives is better for the merchant. However, when there is no conflict, it is unambiguously better for the merchant to hire one sales representative as the rent that the merchant leaves to the sales representative to motivate him to work on one task can also be used to motivate him to work on the other task.
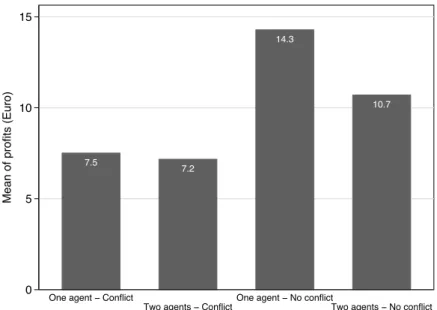
In order to find an answer to our research question whether the theoretical incentive problem of inducing a single agent to simultaneously exert efforts in conflicting tasks is empirically relevant, we conducted a laboratory experiment with 474 subjects. There are four treatments with a 2 × 2 design between the number of agents (one or two) and whether there is conflict between the tasks or not. One central finding of our experiment is that in the one-agent treatment with conflict, two efforts are chosen significantly less often than in the other three treatments. Hence, our experimental data provides strong support for the empirical relevance of the theoretically predicted incentive problem to motivate a single agent to provide efforts in conflicting tasks. However, even in the presence of conflict, a relevant fraction of agents still exerts two efforts (to reciprocate the principals’ generous wage offers). This contributes to our finding that, in contrast to the theoretical prediction, in the presence of conflict, the principals’ average profit is slightly larger in the one-agent treatment than in the two-agent treatment.
8We extend the model by Bolton and Dewatripont (2005, Section 6.2.2), which is based on the idea of agents as advocates of Dewatripont and Tirole (1999).
public service to be provided.
10The government has to decide whether to bundle the two tasks of building the infrastructure and subsequently operating it and delegate them to a public-private partnership, or to use traditional procurement and delegate each task to a single private contractor. Two kinds of cost-reducing investments can be made when building the facility, one that improves the quality of service and another that reduces service quality. The two forms of contracting differ in the investment incentives. In theory, a public-private partnership pro- vides larger investment incentives in the building stage as the consortium reaps the benefits of the cost-reducing investments when running the facility. Under traditional procurement, the builder has no incentive to invest in cost-reducing technologies as only the operator profits from lower running costs. Hence, a public-private partnership chooses the first-best level of the quality-enhancing investment, but there is overinvestment regarding the quality-reducing investment, while under traditional procurement, the first-best level of the quality-reducing investment is taken, but there is underinvestment in the quality-enhancing invest- ment. Which mode of service provision is desirable depends on the relative effects of both investments. Furthermore, we also open the black box of public-private partnerships and take different modes of subcontracting within the consortium into account. We consider two situations, where either the builder is the main contractor and subcontracts service provision, or where the operator is the main contractor who subcontracts the construction of the facility. Theoretically, the first situation provides the same investment incentives as a public-private partnership, whereas the incentives are as under traditional procurement in the latter situation.
In our experiment with 400 subjects, where we use a parameter constellation such that a public-private partnership is more attractive than traditional procure- ment, we test whether the trade-off between strong investment incentives in a public-private partnership and weak investment incentives under traditional pro-
9This chapter is based on Hoppe, Kusterer, and Schmitz (2013). Eva Hoppe and Patrick Schmitz provided the theory and designed the experiment. I programmed and conducted the experiment and carried out most of the statistical analyses. Eva Hoppe, Patrick Schmitz and I wrote the draft.
10The model is based on Hart (2003).
curement is of empirical relevance. We conducted four treatments for all different modes of public-service provision: public-private partnership, traditional procure- ment, subcontracting with the builder as main contractor, and subcontracting with the operator as main contractor. Our results mostly corroborate the theoretical predictions. Both investments are taken more often in the public-private partner- ship and in the builder-as-main-contractor treatments than in the treatments with traditional procurement and operator-as-main-contractor, which in turn creates a higher total surplus when the two tasks are bundled.
Only recently, researchers have started to investigate the impact of cognitive ability on judgment and decision making.
11In Chapter 5,
12we investigate whether the susceptibility to behavioral biases is related to cognitive ability.
13Frederick (2005) introduced the Cognitive Reflection Test (CRT) to measure a person’s mode of reasoning and cognitive ability. The CRT consists of questions that have an intuitive but wrong answer which comes to mind quickly, and a correct one which requires more deliberation. We use this test to categorize subjects into more intuitive and more deliberate decision makers in order to test whether more deliberate thinking lowers the probability of falling for a behavioral bias. In our experiment, we study the base rate fallacy (to underweight the base rate), the conservatism bias (to overweight the base rate), overconfidence, and the endowment effect. Our results show that subjects with lower cognitive abilities are more likely to fall for the base rate fallacy and for the conservatism bias. Higher cognitive ability is related to a more precise self-assessment in the overconfidence task, whereas cognitive ability does not affect the occurrence of the endowment effect which is striking in both, low and high CRT groups.
11The literature on heuristics and biases has shown that individuals sometimes use simple decision heuristics instead of deliberate rational thinking (see Kahneman et al., 1982).
12This chapter is based on Hoppe and Kusterer (2011a). Eva Hoppe and I designed the experiment. I programmed and conducted the experiment. Together, we analyzed the data and wrote the draft.
13For a related study, see Oechssler et al. (2009).
Searching for evidence: less can be more
2.1 INTRODUCTION
Regulation and antitrust has become more complex. For example, in financial regulation in the United States, the Dodd-Frank Act which was signed into law in 2010 is “23 times longer than Glass-Steagall” (Economist, 2012), the legislation passed in the 1930s as a response to the 1929 crash of Wall Street. In the European Union, the European Commission (EC) observes increased complexity in merger cases. The EC states: “The recent trend that transactions become more complex has continued in 2013. Second phase investigations in particular generally require sophisticated quantitative and qualitative analyses involving large amounts of data.” (European Commission, 2014, p. 25).
Complexity itself may not be problematic, but it becomes an issue if the
firms and government agencies involved in regulation and antitrust cases cannot
adjust to it in a similar fashion. While firms can presumably more easily increase
their budget for legal and/or economic advice if deemed necessary, government
agencies face binding budget constraints and may be unable to increase their
workforce or keep enough competent staff on their payroll. This asymmetry may
lead to biased decisions and welfare losses, or, as Rogoff (2012) puts it for the
case of financial regulation: “The problem, at least, is simple: As finance has
become more complicated, regulators have tried to keep up by adopting ever
more complicated rules. It is an arms race that underfunded government agencies
have no chance to win.”
In a setting where a decision-maker has to decide on an issue but is uninformed and has to rely on two biased groups that may search for multiple pieces of information and submit it to her, we find that reducing complexity may increase search activity and welfare if the two groups are asymmetric in the utility they derive from a favorable decision.
We assume that the two groups derive positive utility only if the decision is made in their favor. Applied to our initial example, one group may be interpreted as a firm filing for a merger with one of its competitors while the other group is the antitrust authority attempting to prevent a potential reduction of consumer surplus due to the merger. In this situation, we argue that it is natural to assume that both groups benefit from a favorable decision only and that the (monetary) benefit of a cleared merger to the involved firm(s) by far outweighs the (potentially non-monetary) benefit of the (bureaucrats of the) antitrust authority in case of a blocked merger.
Both groups can search simultaneously for information on multiple dimen- sions. We interpret the number of dimensions as the complexity of a case. If the utility of the disadvantaged group is too low to engage in any search for information initially, we show in a first step that a reduction of complexity, that is, a reduction of the number of dimension available for investigation, may increase search incentives of this group holding constant full search by the other group.
The reduction of complexity reduces the advantage of the privileged group which makes search more attractive to the disadvantaged group.
The decision-maker aims to maximize welfare but is neither informed about
the state nor is she able to observe the search activity by the two groups. In
a first-best world, the decision-maker is fully informed and does not generate
welfare losses by wrong decisions. This could be reached in equilibrium if both
parties search on all dimensions. In an equilibrium where one of the groups does
not search on all dimensions, however, the decision-maker is not fully informed
and cannot avoid decision errors. A reduction of complexity has in principle two
effects: it makes it impossible to reach the first-best but it can at the same time
lead to increased search activity by the disadvantaged group which translates
into more and more balanced information available to the decision-maker. For
an initially large enough number of dimensions, this can lead to an increase of welfare.
Our results suggest that it may be beneficial for welfare to simplify proce- dures in competition and regulation cases if the involved agents are asymmetric.
This finding is consistent with the Regulatory Fitness and Performance program (REFIT) initiated by the EU which, regarding merger review, aims “to make the EU merger review procedures simpler and lighter for stakeholders and to save costs.” (European Commission, 2014, p. 24)
The decision-maker in our model could correspond to a judge deciding on an antitrust or regulation case in the US or to a judge presiding over a white- collar-crime case. In the EU, the EC has the hybrid role of a biased group and the decision-maker. On the one hand, its goal is to protect consumer interests, on the other hand, it decides on whether to allow or block a merger. But because ‘wrong’
decisions can be reviewed and overturned by the European Court of Justice, our model also applies to the European case.
Another prominent application of our model is informational lobbying with competing interest groups.
1Policy-makers who have to decide on whether to vote in favor of or against new legislation are potentially uninformed about the implications of the new legislation but can rely on lobby groups to feed them with (possibly biased) information. Lobby groups benefit from a policy change in their favor and can invest resources to search for arguments and information supporting their preferred outcome. If such information is discovered, the group has an incentive to inform the policy-maker about it. Examples where the benefit of a favorable decision may differ significantly between interest groups include tobacco companies competing with consumer protection groups in order to avoid sales and/or marketing restrictions or oil companies lobbying for drilling rights or the legalization of fracking against environmental protection interest groups.
1In informational lobbying, interest groups submit information supporting their cause to a decision-maker. A second important instrument in lobbyist activities are financial contributions.
It has been argued that informational lobbying is more prevalent, especially in the EU (Chalmers, 2013; New York Times, 2013), and more important compared to contributions (Potters and van Winden, 1992; Bennedsen and Feldmann, 2002).
Our model is related to the literature on strategic information transmission started by Crawford and Sobel (1982).
2In these models, an uninformed decision maker (receiver) makes a decision based on information presented by one or more informed expert(s) (sender). The messages in these games typically are cheap talk while in our model, messages are verifiable, and senders can only send hard information they have gathered at a cost beforehand.
In the economic literature on lobbying
3there are two different channels through which interest groups can influence the political decision process: cam- paign contributions and informational lobbying.
4Interest groups can either supply politicians with information pertinent to the policy decision (Milgrom and Roberts, 1986; Austen-Smith and Wright, 1992; Potters and van Winden, 1992) or donate money to swing policy in their favor or help the preferred candidate to get elected (Prat, 2002a,b; Coate, 2004a,b), or both (Bennedsen and Feldmann, 2006; Dahm and Porteiro, 2008; Cotton, 2012). Generally, the literature on informational lobbying shows that decision-makers can learn something about the state of the world even from biased experts and improve policy by taking their information into account. We show in this chapter that with asymmetric lobby groups and multiple searches, the decision-maker may only receive infor- mation from the stronger group and welfare-reducing decision errors can occur.
Simplifying the decision process by restricting the number of dimensions where information is taken into account for the decision results in more balanced in- formation provision and increased welfare. A similar result has been found in the literature on contribution limits. Exertion of political influence by means of contributions is seen critical by the general public which fears that wealthy groups can simply buy political favors (Prat, 2002b). In response, many countries use some form of contribution limits or try to reform campaign finance. In a model with politicians, lobbies, and voters, Prat (2002b) shows that while voters might learn valuable information from political advertising, the median voter can be better off when contributions are banned. Cotton (2012) analyzes a situation where a rich and a poor lobby group can pay contributions in order to get access
2A more recent overview of this literature is provided by Sobel (2013).
3There is also a large political science literature on this topic, for an overview see Woll (2006).
4For an overview, see Grossman and Helpman (2001).
to a decision-maker which is assumed to be essential for the transmission of information. Without caps on contributions, the poor group has less access but is not necessarily disadvantaged because the politician can extract a rent from the rich group. Contribution limits then make the richer group better off as they limit the rent-extraction ability of the decision-maker. In his model, limits can be bene- ficial and yield more information transmission and better policy when interest groups can decide whether to form a lobby or not. Our model is complementary to that literature in that it shows that welfare can be improved by simplifying the decision process when two asymmetric interest groups compete.
In our model, the interest groups are only interested in finding evidence in favor of their cause and hence are advocates in the sense of Dewatripont and Tirole (1999) who have shown that when agents receive decision-based rewards, competition between opposed agents can increase information gathering or render it cheaper for the principal (see also Austen-Smith and Wright, 1992). Similarly, Krishna and Morgan (2001) show that a decision-maker benefits from consulting two experts, but only when the experts’ preferences are opposed. Bennedsen and Feldmann (2006) look at the interplay of informational lobbying and contributions and find that if contributions are available, less information is transmitted in equilibrium and competition between the groups cannot fully alleviate this result because search creates an information externality if it is unsuccessful which benefits the weaker group and thus decreases the incentives to search by the stronger group.
The positive effect of reducing the action space of the agents has also been
shown in the literature on optimal delegation (e.g. Szalay, 2005; Alonso and
Matouschek, 2008; Armstrong and Vickers, 2010). In these models, a principal
delegates decision making authority to a self-interested agent. The principal
has to decide how much liberty he wants to give to the agent. In a model of
interval delegation, Szalay (2005) for example shows that removing intermediate
decisions from the agent’s action set can improve his incentives for information
gathering. This is similar to our model where the quality of decisions can be
improved by restricting the information space through deliberate exclusion of one
of the dimensions.
The remainder of this chapter is organized as follows. In Section 2.2 we present the model. The analysis of the game in Section 2.3 starts in Subsec- tion 2.3.1 with the case where search is unrestricted and proceeds with the case where search on one dimension is prohibited in Subsection 2.3.2. We then com- pare the search activity and the effects on welfare of the reduction in the number of dimensions in Subsection 2.3.3. A discussion follows in Section 2.4, and we conclude and provide an outlook in Section 2.5.
2.2 THE MODEL
A judge (she) has to make a decision on a case based on information available on multiple dimensions. The information is collected by two interested parties, the firm and the regulator. Information on all dimensions is weighted equally for the decision. More specifically, the judge can either accept or reject a proposal brought forward by the firm, denoted by d
fand d
r, respectively. The firm prefers decision d
f, while the regulator prefers d
r. The information on each dimension i ∈ {1, 2, . . . , n} consists of the realization of two i.i.d. random variables θ
i,j,
j ∈ { f , r}. Each θ
i,jtakes value 1 with probability p and value 0 with probability 1 − p where 0 < p < 1. θ
i,f= 1 can be interpreted as information in favor of the proposal while θ
i,r= 1 can be interpreted as information against the proposal in dimension i. θ
i,j= 0, j ∈ { f , r} means that there is no information available either in favor or against the proposal in dimension i. The state of the world is defined as Θ = {∑
iθ
i,f, ∑
iθ
i,r}.
5The two parties receive benefit w
j≥ 0 in case d = d
jand zero otherwise.
6Both parties maximize expected profits u(w
j, d, c) = Pr(d = d
j|E
f, E
r)w
j− E
jc where c > 0 are the marginal search costs and E
j, j ∈ { f , r} is the number of searches by each party. To account for asymmetry between the two parties, we assume w
f> w
r. Furthermore we assume that the benefit accruing to the firm if
5Qualitatively, our information structure can be interpreted as an extension of the information structure of Dewatripont and Tirole (1999) to multiple dimensions.
6The subscript jis dropped later in the analysis whenever it is clear to which partywrefers.
the proposal is accepted is large enough such that full information collection on all dimensions always overcompensates the cost of doing so.
7The judge’s aim is to maximize expected welfare based on the information available to her.
8The welfare of a decision is given by ∑
iθ
i,f− ∑
iθ
i,rif the proposal is accepted and ∑
iθ
i,r− ∑
iθ
i,fif the proposal is rejected.
9Thus, in case of full information, if there is (weakly) more information in favor of the proposal, i.e., ∑
iθ
i,f≥ ∑
iθ
i,r, it is optimal to accept the proposal and reject it otherwise. Observe that in case of a tie, the proposal is accepted.
10In the situation we analyze there is incomplete information such that the state of the world is ex ante unknown. Without any information, the expected value of pro and contra information is the same in all dimensions and the judge accepts the proposal. In this situation, that decision reduces welfare whenever ∑
iθ
i,r> ∑
iθ
i,f. Hence, the judge is interested in gathering information. She cannot search for information herself but has to rely on information made available to her by the firm and the regulator. At the beginning of the game, the judge chooses the number of dimensions which are relevant for the decision. The firm is interested in searching information in favor of the proposal only, i.e., θ
i,f. The regulator only searches for information against the proposal θ
i,r. Both firm and regulator simultaneously search in each dimension at cost c. If a party searches in a given dimension i and there exists evidence in this dimension, it learns θ
i,jwith certainty.
If a party does not search, it learns nothing, which we denote by 0. Hence, finding no information and not searching for information yield the same result.
After searching, both parties send a message m
j∈ { ∑
kθ
k,j, 0} to the judge, where k denotes the number of dimensions where the respective party searched for information. We assume that parties cannot withhold information. This is
7It is easy to verify that there are values ofwf andcsuch that the firm wants to searchntimes as long as Pr(d=df|Ef,Er)wf is increasing inEf.
8We assume that the decision-maker has no leeway and has to take the ex post optimal decision given the evidence presented to her. We believe that a judge or the legislature politically cannot implement a decision rule that is not welfare-optimal (for a similar argument, see Bennedsen and Feldmann, 2006).
9We assume that the benefitswjas well as the search costscare insignificant relative to the welfare effects of each dimension and hence omit them from our welfare definition.
10We argue that in case of a tie, there is no conclusive evidence against the proposal and thus, there is no obvious reason to decide against it. Our results do not change qualitatively if we use a tie breaking rule where the judge rejects the proposal or where she flips a fair coin.
Nature draws the state Θ.
Number of allowed dimen- sions is set.
Firm and regulator collect information and send messa- ges to the judge.
Judge decides based on the information available.
Payoffs and welfare are realized.
1 2 3 4
Figure 2.1: Sequence of events.
natural in our case as parties only search for information that is beneficial to them and hence have no interest in holding it back. The message either consists of the number of pieces of evidence that were found or 0. The information available to the judge therefore is M = {m
f, m
r}, which we also call outcome.
The judge holds two types of beliefs. First, the judge has an expectation µ
j∈ {0, 1, 2, . . . , n} about the number of searches of each party.
11,12Second, she has a belief about the state of the world. Updating this belief not only depends on the messages received by the two parties but also on the expectation about the number of searches. Two cases are of particular interest to us. When the judge expects the regulator not to search (µ
r= 0) and receives m
r= 0, she learns nothing about the evidence against the proposal and hence she cannot update her belief about the state. In contrast, when the judge expects a full search by the regulator on all dimensions, i.e. µ
r= n, she updates her belief about the state such that the probability of the state contained in the message she receives is equal to 1. The sequence of events is summarized in Figure 2.1.
2.3 ANALYSIS
We derive perfect Bayesian equilibria of the specified game. Each of these equilibria consists of the number of searches by firm and regulator, the best response (or decision rule) by the judge, and her beliefs µ
fand µ
rabout the
11Technically, the judge holdsn+1 beliefs Pr(Ej=X)that a party’s number of searches equalsX∈ {0,1,2, . . . ,n}. In pure-strategy equilibria, the judge expects the parties to search a specific number of times such that one of these beliefs equals 1 and all other equal zero.
12In what follows, we assume the judge’s expectation about the number of searches by the firmµf to be equal to the number of admissible dimensions.
number of searches performed by the firm and regulator, respectively. In what follows, we fix the number of dimensions n = 3. We first analyze Situation 1, where searching in all three dimensions is allowed (the case of full complexity), and Situation 2, where the judge only accepts evidence from two of the three dimensions (reduced complexity). All proofs are relegated to the Appendix.
2.3.1
SITUATION1:
SEARCH IS POSSIBLE IN ALL THREE DIMENSIONSIt is a natural starting point to first determine the benefit such that it is in the regulator’s interest to acquire information on all possible dimensions as well.
Observe that in case both parties search three times, the information available to the judge M is equal to the state Θ. If the judge believes that both firm and regulator search three times (µ
f= µ
r= 3), she decides as in the case with full information according to the first-best decision rule.
The probability Pr(d
r|E
r) of a decision against the proposal when the regulator performs E
r∈ {0, 1, 2, 3} searches is given by
13Pr(d
r|0) = 0
Pr(d
r|1) = (1 − p)
3p
Pr(d
r|2) = (1 − p)
3(2p(1 − p) + p
2) + 3 p(1 − p)
2p
2Pr(d
r|3) = (1 − p)
3(1 − (1 − p)
3) + 3p(1 − p)
2(3p
2(1 − p) + p
3) + 3p
2(1 − p)p
3.
For example, if the regulator searches three times, the decision is made in his favor in case he finds more information than the firm. Specifically, if the firm finds no information, the regulator wins if he finds any positive amount of information. If the firm reports one piece of information, the proposal is rejected if the regulator finds two or three pieces of evidence. Finally, the regulator needs to find three pieces of information if the firm has found two.
It is optimal for the regulator to search three times if the expected profit of searching three times is larger than the expected profit of searching twice (2.1),
13AsEf =3 we omit the reference to the number of the searches by the firm.
of searching once (2.2), and of not searching (2.3).
Pr(d
r|3)w − 3c ≥ Pr(d
r|2)w − 2c (2.1) Pr(d
r|3)w − 3c ≥ Pr(d
r|1)w − c (2.2) Pr(d
r|3)w − 3c ≥ Pr(d
r|0)w (2.3) The following lemma gives a condition under which these constraints hold such that the regulator matches the search efforts by the firm.
Lemma 2.1. There exists a critical value p ˜ ∈ [0, 1] such that if and only if w ≥ w, where
w =
c/ p − 5p
2+ 16p
3− 28 p
4+ 26p
5− 10p
6for 0 < p ≤ p ˜ c/ p − 4p
2+
283p
3− 13 p
4+ 10p
5−
103p
6for ˜ p < p ≤ 1, there exists an equilibrium in which the regulator and the firm search three times and the judge has beliefs µ
f= µ
r= 3.
Constraint (2.1) can be written as w∆
3,2≥ c, where ∆
k,lrefers to the difference in success probability when searching k instead of l times. Similarly, (2.3) can be written as w(∆
3,2+ ∆
2,1+ ∆
1,0)/3 ≥ c. The binding incentive constraint is determined by the comparison of the increase in the probability of a decision against the proposal when searching three times instead of two times, ∆
3,2, with the average probability increase for the first two efforts, (∆
2,1+ ∆
1,0)/2, i.e. by comparing constraints (2.1) and (2.3). Constraint (2.2) is never relevant. For low values of p, the third search has a relatively small effect on the probability of a decision against the proposal. The reason is that the additional cases in which the decision is made in favor of the regulator due to the third search are unlikely to occur if p is small. It follows it is harder to motivate the regulator to conduct the third search than it is to conduct the first two, i.e. (2.1) is binding. For large p, the additional cases due to the third search become more relevant and increase the probability of a favorable decision. Hence, the first two searches are relatively harder to motivate and (2.3) is binding.
As a next step, we first show that there also exists an equilibrium where
the regulator does not search, and second, that no search is an equilibrium for
{0,0} {1,0} {2,0} {3,0}
0 < p ≤ 1/3 Regulator Firm Firm Firm
1/3 < p ≤ 2/3 Regulator Regulator Firm Firm 2/3 < p < 1 Regulator Regulator Regulator Firm Exp. welfare if accepted 0 − 3p 1 − 3p 2 − 3 p 3 − 3p
Table 2.1: Decision rule for µ
f= 3, µ
r= 0.
benefits below w. In order to determine the no-search equilibrium (µ
r= 0), it is sufficient to count the amount of evidence found by the firm. There are four possible outcomes M after the firm has searched for information: {3, 0}, {2, 0}, {1, 0}, and {0, 0}. In case the firm finds three pieces of evidence, the decision is made in favor of the firm, while the proposal is rejected if the firm finds no evidence.
We assume that if the judge receives a message other than 0 when expecting the regulator not to search, then she updates her (out-of-equilibrium) belief concerning the number of searches of the regulator to µ
r= 3.
14She thus updates her belief regarding the state such that the probability that it is equal to the message is equal to 1. It follows that the decision rule under full information applies out of equilibrium.
The optimal decision rule for the two intermediate cases depends on p. Note that the expected value of information against the proposal is given by 3 × p
3+ 2 × 3(p
2(1 − p)) + 1 × 3p(1 − p
2) = 3p. For example, if the firm finds one piece of evidence and the proposal is accepted, expected welfare is given by 1 − 3p which is positive only for p < 1/3 and hence the judge will reject the proposal for values of p larger than 1/3. The judge decides according to the decision rule in Table 2.1.
With increasing probability of information existing, there are more cases in which the decision is made against the proposal, e.g. for p > 2/3, the firm has to find three pieces of evidence to offset the expected value of contra information.
14Bayes’ rule does not apply in situations that occur with probability zero. We choose the out-of-equilibrium belief that is least favorable for the regulator.
It is optimal for the regulator not to search if the following constraints hold.
Pr(d
r|0)w ≥ Pr(d
r|3)w − 3c (2.4) Pr(d
r|0)w ≥ Pr(d
r|2)w − 2c (2.5) Pr(d
r|0)w ≥ Pr(d
r|1)w − c (2.6) The incentive compatibility constraints (2.4), (2.5), and (2.6) ensure that the change in winning probability when not searching instead of searching three, two, or one time(s) is larger than the change in cost. These constraints can easily be satisfied by setting w = 0. The following lemma states a threshold on w below which it is not in the regulator’s interest to search for information.
Lemma 2.2. There exists a critical value p ˆ ∈ [0, 1] such that if and only if w < w, ˆ where
ˆ w =
c/ 3p
3− 8p
4+ 8 p
5− 3p
6for 0 < p ≤
13∞ for
13< p ≤ p ˆ
−3c/ 9p
2− 36p
3+ 54 p
4− 39p
5+ 12p
6for ˆ p < p ≤
23∞ for
23< p ≤ 1,
there exists an equilibrium where the regulator does not search, the firm searches in all three dimensions, and the judge has beliefs µ
f= 3 and µ
r= 0.
For values of p ∈ [0, 1/3], if the regulator does not search, he wins only in case the firm does not find information. Searching in one dimension does not improve the chances of the regulator. This is the case because if the regulator searches in one dimension, the best he can do is find one piece of evidence. Given the decision rule, this leads to a decision in favor of the regulator only if the firm finds no evidence. In this case, however, the decision is always made in favor of the regulator. Hence, one search by the regulator can never be optimal.
Searching twice leads to a decision in favor of the regulator provided that the firm
does not find any information or if it finds one piece and the regulator finds two
pieces and thus increases the chances of winning for the regulator compared to
not searching. Finally, searching in all three dimensions leads to a decision in
favor of the regulator in two additional cases (when compared to searching twice):
he also wins in case the firm finds one piece of information and the regulator finds three pieces, and in case the firm finds two pieces while the regulator finds three. This implies that either the incentive constraint preventing the regulator from searching twice instead of zero, or the incentive constraint preventing the regulator from three searches instead of zero, or both are binding. As the average increase in winning probability per search is larger with three searches compared to two, constraint (2.4) is binding and yields the relevant upper bound ˆ w for the regulator’s benefit.
For p ∈ [1/3, 2/3], when not searching, the regulator now also wins if the firm has found one piece of evidence. Searching once strictly reduces his chances of winning compared to not searching because if both he and the firm find one piece of evidence (out of equilibrium), he does not win. For the same reason, two searches also lower the winning probability. Without searching, the regulator certainly wins when the firm finds one piece of evidence, but when searching twice he only wins in this case when he finds zero or two pieces of evidence.
Therefore, both conditions (2.6) and (2.5) are always satisfied. A full search on all three dimensions has an ambiguous effect on the winning probability. On the one hand it lowers the chances of winning in case the firm finds one piece of evidence for the reason outlined above, but on the other hand the regulator now also wins if he finds three pieces of evidence and the firm finds two. It turns out that for smaller values of p, Pr(d
r|3) is smaller than Pr(d
r|0) and hence (2.4) always holds for arbitrary positive values of w, while for ˆ p < p < 2/3, constraint (2.4) becomes binding and determines ˆ w.
When p ∈ [2/3, 1] and the regulator does not search, the decision is also made
against the proposal if the firm finds two pieces of evidence. Searching once
strictly decreases the regulator’s chances of winning because in case the firm
finds one or two pieces of evidence, he only wins if he finds nothing. This also
is the case when he searches twice. If the firm finds one piece of evidence the
proposal is rejected only when the regulator finds zero or two pieces of evidence
but not when he finds one, and if the firm finds two pieces, the regulator must not
find anything in order to win. Finally, a similar argument establishes that when
searching three times, the winning probability is also strictly lower compared to
not searching. It is then obvious that there exists no positive wage inducing the regulator to search for information in this range of p.
As we are interested in a situation where the benefit of the regulator is not sufficient to make three search efforts optimal for him, we next compare the two critical values of w—w and ˆ w—to show that the equilibrium in which the regulator does not search exists for benefits below w, i.e. the lowest possible benefit inducing three searches by the regulator.
Lemma 2.3. Suppose that w < w. No search by the regulator is an equilibrium given three searches by the firm.
The lemma says that the necessary benefit for three efforts by the regulator when the judge expects him to search three times (µ
r= 3) is always smaller than the upper bound for the benefit such that searching is not profitable when the judge expects him not to search (µ
r= 0). The reason for this lies in the different beliefs. When the judge holds the belief that the regulator does not search, then the chances of winning are comparatively high for the regulator, especially for large p. This is because the judge takes into account the expected value of information against the proposal, which can be quite high depending on p. In turn, the benefit necessary to motivate him to search is relatively large compared to the benefit needed in the situation where the judge expects the regulator to search. When µ
r= 3, the decision will never be made against the proposal if the regulator does not search, and hence his intrinsic motivation to search for information is larger.
For benefits below w, equilibria where the regulator searches one or two times also exist (see Appendix 2.6.1). In Lemma 2.4 we define constraints on w such that no search by the regulator is the unique equilibrium in pure strategies in Situation 1.
Lemma 2.4. There exist critical values w
2and p such that if and only if either ¨ (a) w < w or (b) w ˜
2< w < w and 1/2 < p < p, no search by the regulator is the ¨
unique equilibrium given three searches by the firm.
To sum up, in the situation where search is unrestricted and the judge accepts
evidence from all three available dimensions, we have looked at the case where
firm and regulator are asymmetric in that the benefit w for the regulator is bounded from above such that the equilibrium in which both firm and regulator conduct a full search does not exist. This leads to a situation in which search activity is one-sided: the firm gathers evidence on all dimensions whereas the regulator does not search. In consequence, the judge only learns the arguments in favor of the decision.
2.3.2
SITUATION2:
SCOPE OF SEARCH IS RESTRICTEDIn this section, we analyze the situation where the scope of search is restricted in the sense that the judge accepts evidence from two dimensions only. We describe an equilibrium in which both parties search in all allowed dimensions and the reported amount of evidence is equal to the true values of the investigated dimensions. The probability that information exists in the third dimension is equal for both parties (and cases) and thus not relevant for the decision.
We proceed by specifying the decision rule by the judge given the belief that both parties search twice, µ
f= µ
r= 2. In this case, there are nine possible outcomes M: {2,2}, {2,1}, {1,2}, {2,0}, {0,2}, {1,1}, {1,0}, {0,1}, {0,0}. The judge then takes the welfare-maximizing decision where the proposal is accepted if the firm has found (weakly) more information and rejected otherwise. The regulator’s chances of winning contingent on the number of searches is given by
Pr(d
r|0) = 0
Pr(d
r|1) = (1 − p)
2p
Pr(d
r|2) = 2p(1 − p) p
2+ (1 − p)
22p(1 − p) + p
2Given the decision rule the regulator will never win if he does not search. Search- ing once leads to a decision in favor of the regulator only if he finds one piece of evidence while the firm does not find any information. With two searches, the regulator wins if he finds two (one or two) piece(s) of evidence and the firm one (zero). It is in the interest of the regulator to search twice if the following conditions hold.
Pr(d
r|2)w − 2c ≥ Pr(d
r|1)w − c (2.7)
Pr(d
r|2)w − 2c ≥ Pr(d
r|0)w (2.8)
The following lemma gives a condition under which an equilibrium where the regulator and the firm search two times exists.
Lemma 2.5. Suppose that search on one dimension is prohibited. If and only if w ≥ w, where
w =
c/ p − 3 p
2+ 5p
3− 3p
4for 0 < p < 1/3 c/ p −
52p
2+ 3 p
3−
32p
4for 1/3 ≤ p < 1,
there exists an equilibrium in which the regulator and the firm search on all two admissible dimensions and the judge has beliefs µ
f= µ
r= 2.
The regulator compares the increase in winning probability for the first and for the second effort. For small p, the first increase is large because he never wins if he does not search, but he wins if M = {0, 1} when searching once. The second increase is small as the cases in which he additionally wins require a larger amount of information, which is unlikely for small p. Hence, in this range, the necessary benefit is determined by the incentive constraint for the second effort, while for large p, the constraint for the first effort is the relevant one.
2.3.3
COMPARISON OF SITUATIONS1
AND2 Search activity
After solving the game separately in Situation 1, where search is unrestricted, and in Situation 2, where evidence on one dimensions is not accepted by the judge, we now combine and summarize our previous results regarding the regulator’s search activity in the following proposition.
Proposition 2.1. The minimum benefit w necessary to render three efforts opti- mal for the regulator when three dimensions are allowed is always larger than the minimum benefit w necessary to make two efforts optimal when only two dimensions are allowed.
The proposition says that a range of benefits w exists where it is not in
the regulator’s interest to keep up with the firm’s search activity when search
is unrestricted, while it is in his interest to do so when the scope of search is
restricted to two dimensions. The range of benefits where this is the case is depicted by the gray area in Figure 2.2.
The reason is that the net increase in winning probability relative to the cost of searching c of the regulator in Situation 2 turns out to be larger than in Situation 1.
Therefore, the benefit making search worthwhile for the regulator is smaller in Situation 2. If it is unlikely that information exists (small p), in both situations the regulator compares the expected profit from full search with the expected profit of one less search. The absolute probability of winning when the regulator matches the firm’s search efforts is larger in Situation 1 than in Situation 2. However, the probability of winning with two efforts is relatively large in Situation 1 while it is relatively small in Situation 2 such that the net increase in the probability of winning caused by the “catch-up” search is larger in Situation 2 and hence a smaller benefit is required.
For large probabilities that information exists, the relevant comparison is between full search and no search. In both situations, the regulator will never win when he does not search. He thus compares the average increase in winning probability per c in Situations 1 and 2 when searching fully. While again the absolute probability of winning is larger in Situation 1, the increase per search cost c is higher in Situation 2, leading to a smaller necessary benefit.
15The corollary follows immediately from Proposition 2.1 and Lemma 2.3.
Corollary 2.1. If w < w < w, in Situation 1 there exists an equilibrium where the regulator does not search while the firm conducts a full search on all dimensions, whereas in Situation 2 the regulator matches the search efforts by the firm.
Figure 2.2 shows the range of benefits described in Corollary 2.1. For benefits located in the gray area, the regulator has no incentive to search under full complexity but searches on all allowed dimensions under reduced complexity.
Observe that the upper bound for the benefit ˆ w such that no search is optimal is not shown in the figure as the upper bound either does not exist or is very large.
Under the conditions of Proposition 2.1 there are two other equilibria in Situation 1 where the regulator searches once and twice, respectively. The
15For the small range ˜p<p<1/3, the regulator compares the average increase when searching fully in Situation 1 with the increase of the “catch-up” search in Situation 2 and again finds the latter increase to be larger than the former.
0 0.5 1 0
10 20
p w
w w
Figure 2.2: The gray area defines the range of benefits defined in Corollary 2.1 where reduced complexity increases search activity. For this figure, the value of c is set to 1 for both benefits.
following proposition shows that the main effect of Proposition 2.1 is still present also if we restrict w and p such that not searching is the unique equilibrium in Situation 1.
Proposition 2.2. There exist critical values w
2and p such that if and only if either ¨ (a) w ≤ w < w and ˜ 0 < p < 1/3 or (b) max{w
2, w} < w < w and 1/2 < p < p, ¨
the regulator searches in two dimensions if the scope of search is limited to two dimensions while he does not search if searching on all three dimension is allowed.
Taken together, if the benefits of the regulator are bounded from above,
particularly if the benefits are below ˜ w, he will not search if the scope of search is
unrestricted. Prohibiting search for information on one of the three dimensions
lowers the benefit that is necessary to make the regulator willing to search on all
available dimensions. This levels the playing field such that the regulator is able
to search on as many dimensions as the firm. Next we show that a reduction of
the number of admissible dimensions can also be welfare-enhancing.
Welfare
We now determine the expected welfare losses L
i, where i ∈ {1, 2} refers to Situation 1 or 2, due to decision errors under incomplete information. These errors occur when the decision taken by the judge given M does not match the optimal decision given Θ. In order to facilitate the intuition, we decompose the expected welfare losses L
iin each situation into two terms: on the one hand the probability of messages in which a decision error can occur (henceforth error- prone messages or M
e) and on the other hand the expected losses conditional on having received messages in which errors can occur (henceforth conditional expected losses).
In Situation 1, where we focus on the equilibrium where the regulator does not search, welfare losses can occur in the two intermediate outcomes, that is, if the firm has found evidence in one or two dimensions.
16Hence, the probability of error-prone messages {1, 0} and {2, 0} in Situation 1 is Pr M
e1= 3 p
2(1 − p) + 3 p(1 − p)
2. The cases in which welfare is reduced depend on the level of p as the judge’s decision rule is different for different values of p. In case of 0 < p < 1/3, a wrong decision is made by the judge when the firm has found one piece of evidence but two or three pieces of evidence exist for the regulator, or when the firm has found two pieces but there are three pieces of evidence favoring the regulator’s case. The conditional expected losses in this range of p are
3 p(1 − p)
2× 3 p
2(1 − p)(2 − 1)
Pr (M
e1) + 3 p(1 − p)
2× p
3(3 − 1) Pr (M
e1)
+ 3 p
2(1 − p) × p
3(3 − 2) Pr (M
e1)
When 1/3 < p < 2/3, the judge rejects the firm’s proposal also when it has found one piece of evidence. This decision rule results in a welfare loss if the firm has found one piece and there exist no pieces of evidence for the regulator. Welfare is also reduced as before when the firm has found two pieces and there exist three pieces of evidence on the side of the regulator. In this case, the conditional
16Observe that losses do not occur in case of ties. While the actual decision might violate the specified tie-breaking rule, the value of information is the same regardless of the decision and thus cancels out so that the welfare loss is equal to zero.